24
Chapter 6 Position and Speed Regulation in DC Servomechanism § 6.1 DC Servo System § 6.2 Servo Components § 6.3 Component Model § 6.4 System Control
| Date post: | 06-Dec-2015 |
| Category: |
Documents |
| Upload: | tejesh-tutaram |
| View: | 254 times |
| Download: | 0 times |

Chapter 6 Position and Speed Regulation in DC Servomechanism
§ 6.1 DC Servo System
§ 6.2 Servo Components
§ 6.3 Component Model
§ 6.4 System Control

§ 6.1 DC Servo System (1) • Fundamental Operations of DC Servo:
(1)Speed servo
Speed regulation, speed tracking
(2)Position servo (Servomechanism)
Position control, position tracking

§ 6.1 DC Servo System (2)
Stable operation
Fast transient response
Small steady-state error
System robustness
Command following
Disturbance rejection
• Control Objective:
Implies

§ 6.1 DC Servo System (3)
PC VC CC Amp Motorv(t)i(t) y(t)
ysp(t)Current Velocity
( )dt
• Generic Motor Position Control:
PC: Position controller
VC: Velocity controller
CC: Current controller

§ 6.1 DC Servo System (4)
• Mechatronic View Point:
Power Amp&
DC ServoMotor
DC PowerSupply
(External)
Speed &
PositionSensor
MotorGear Train
& Load
ServoController

Ex: DC servo control of liquid-level process
Amplifier
Valvepositioner
Pump
ea(t)
p(t)ee(t)
K (s)v
xv(t) Potentiometerbridge
Gc(s)
Gm(s)
x(t)
eb(t)er(t)
hc(t)pu(t) qu(t)
qm(t)
hv(t)
§ 6.1 DC Servo System (5)

Gm(s): Servo motor and gear train
Gc(s)Kh KvGm(s)
Kh 1.0
hv(t) eR(t) eE(t) p(t) xV(t)
x(t)
qM(t)
hC(t)
pu(t) qu(t)+ -
+
+
+-
1Rf
Rf/γ
τps+1
§ 6.1 DC Servo System (6)

§ 6.2 Servo Components (1)
DC motor http://www.shangyi.com.tw/c_produact_c.htm
Rotary Encoders
Resolvers
http://www.encodersindia.com/products.html
http://www.encodersindia.com/products.html
• Hardware Components:

§ 6.2 Servo Components (2)
Optical Encoders http://www.usdigital.com/products/hd25a/
http://www.mi-technologies.com/catalog/antennas/indencdr.pdf
Inductosyn Encoders
Potentiometerhttp://www.islproducts.com/prod/pots.htm

§ 6.2 Servo Components (3)
Series
Printedcircuitmotor
DC motor
Commutator typeBrushless
type
Shuntwound
Permanentmagnet
Compoundwound
Fieldmotor
Moving coilor ironlessarmature
Shell typearmature(Ironless
shell or rotor)
Torque motor
Servo motor
Cumulativecompound
Differentialcompound
Permanentmagnet
Switchedreluctance
Stepper
Variablereluctance
Permanentmagnet
Hybrid
• Classifications of DC Motor:

§ 6.2 Servo Components (4)Feedback Devices
Analog Digital
PositionVelocity(output proportional
to velocity)
TachometerPotentiometers
Linear Rotary Rotary Linear
Synchro Resolver Resolver DifferentialTransformer
Incremental(train of pulses)
Absolute(pattern of pulses)
RotaryOptical
Rotary Linear
Quantizer OpticalInduction
• Feedback Devices:
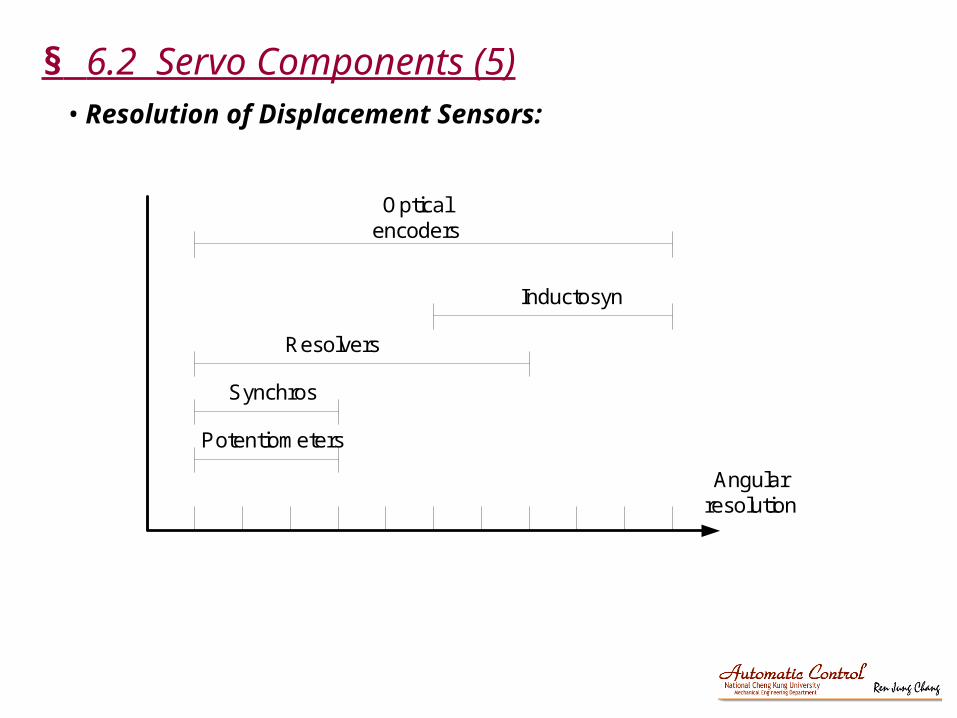
§ 6.2 Servo Components (5)• Resolution of Displacement Sensors:
Opticalencoders
Inductosyn
Resolvers
Synchros
Potentiometers
Angularresolution

• DC Servomotor: Ex: Armature Control
(1) Static model
tT
max
maxv
tmaxT (Stall)
tT BT K v K
t
tmax
T maxmax 0
max Bb
max T maxT 0
tmax
i a T maxmax
T K (Stall)
v
v K K (No load)
K
T K R K
i
La
ia(t)if+
eb(t)
Ra
va(t) M
-
=const.
,Ttm , Jm, Bm,mθ mω
or Permanent magnet
Ttd
§ 6.3 Component Model (1)

(2) Dynamic model
§ 6.3 Component Model (2)
M
E M
E
BmRa
Kb
Ki
+
-
+
-a
1
L sm
1
J s1
s
m(s)ai m(s)
Electronics Mechatronics Mechanics
tdT (s) Load disturbance
aV (s) -

K
i1
Td
(s)+-
mTm
Va(s) 1Ra
1sJms+Bm
1N
m
(s)
(s)(s)
§ 6.3 Component Model (3)
• Gear Train
(3) Simplified Servo Motor
(with gear train)
t im a
a
KT (t) v (t)
R t t
m m m m m dJ B T (t) T (t)
m(s) 1N
(s)
(Motor) (Load)
1
m
(t)
(t) N
mT (s)N
T (s)
(Motor) (Load)
t
tm
T (t)N
T (t)

§ 6.3 Component Model (4)
• Tachometer:
Θ(s) V(s)sKv
Ω(s) V(s)Kvor
vK θ(t) = v(t)
• Potentiometer:
Θ(s) V(s)Ks
s
v(t)K
(t)

§ 6.4 System Control (1)
• Plant Dynamics:
(1) Dynamics
m mI C
0
u(t) w(t)
Servo Motor Command Disturbance
(2) States m
m
Position
Speed

§ 6.4 System Control (2)
(1) Position feedback
Control law: 0 c mu(t) u (t) a ,a
By potentiometer
m m m cI C a u (t) w(t)
F.B. increases stiffness
• Closed-loop Control:
Position feedback is to increase response speed.
Closed-loop:

(2) Velocity feedback
Control law: 0 mcu(t) u (t) b , b
By tachometer
m m cI (c b) u (t) w(t)
F.B. increases damping
Velocity feedback is to decrease response overshoot.
Closed-loop:
§ 6.4 System Control (3)

(3) Position and Velocity feedback
Control law: 0 m mcu(t) u (t) a b , a,b
By tachometerBy potentiometer
,m m
m m m cI (c b) a u (t) w(t)
Optimal control of fast speed and minimum overshoot by optimal design of a and b, respectively.
Optimal control law is realized by state equations with states feedback in modern control theory.
Closed-loop:
Control response speedControl overshoot
Feedback States feedback
§ 6.4 System Control (4)

Ki1
m mJ s BPI
Td(s)
m(s)+ +
-
-(s) IR(s)
Ki
Kb
GCI(s)1
m mJ s B
1
a aL s R
IR(s) Ia(s)
Td(s)
m(s)
+
-+ +
-
-
• Speed Control with Current Loop:
p i
CIi
K (1 Ts)For G (s) , PI control
TspK 1
§ 6.4 System Control (5)

ZOH A/DDigital
computationD/AHold
G(s)
H(s)
Command
ContinuousSys.
Sample & Hold Number Seq. + Algorithm
+
-
• Digital Control Configuration:
(1) System structure
§ 6.4 System Control (6)

wait for clockinterrupt
read analoginput
compute control singal
set analog output
update controllervariable
tsampling time, h
(2) Procedure in real-time sampling and control
§ 6.4 System Control (7)

(3) Discrete PID
§ 6.4 System Control (8)
• Continuous form
t
P I D0
de(t)u(t) =K e(t)+K e(τ)dτ +K
dt
• Discretization
• Discrete form
e(t) e(kh),
0
t
n
i=0
e(τ)dτ h e(i)
de(t) e(k) - e(k -1)
dt h
n
P I Di=0
e(k) - e(k -1)u(k) =K e(k)+K h e(i)+K
h
e(kh) is represented as e(k), h is sampling time

















