1
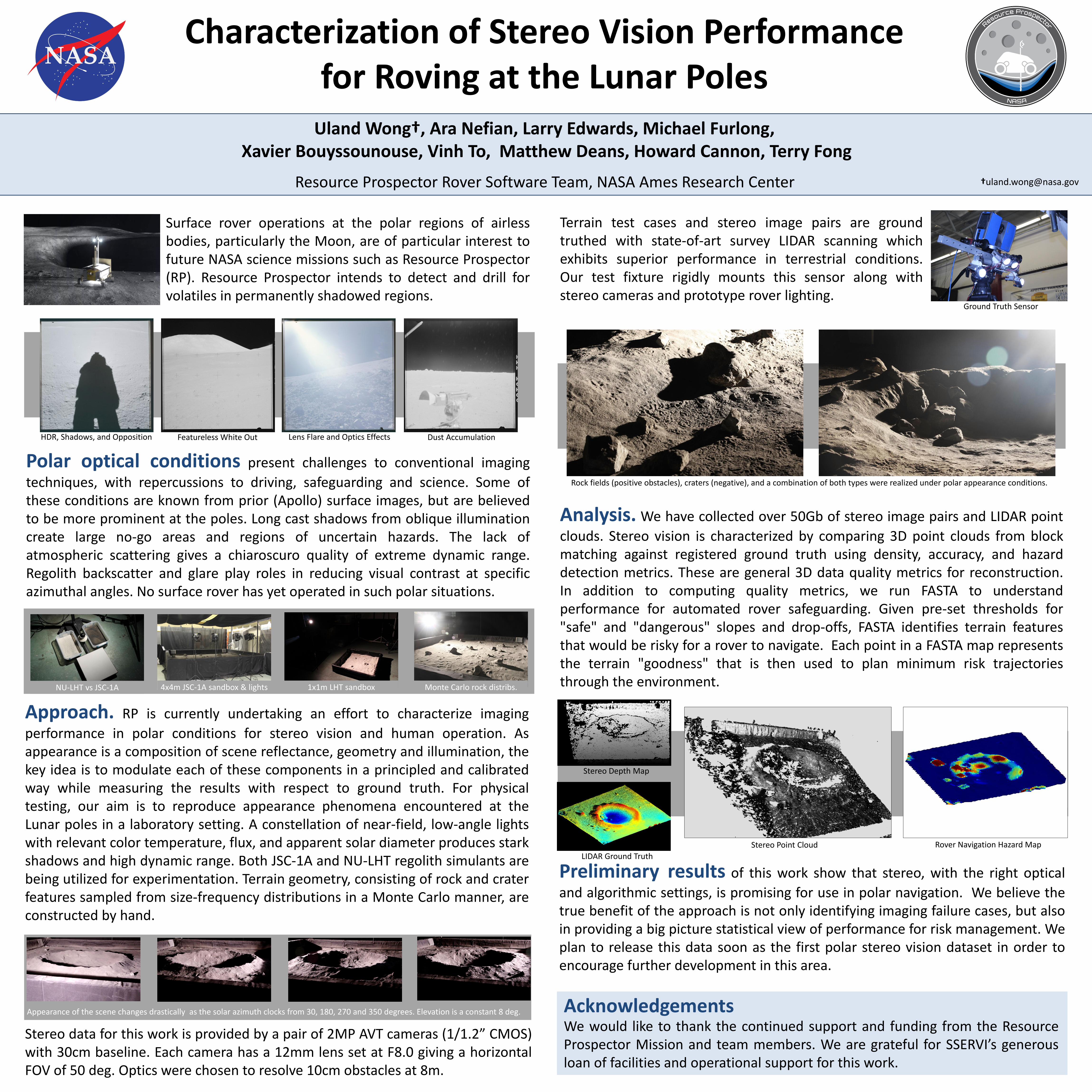
Uland Wong†, Ara Nefian, Larry Edwards, Michael Furlong, Xavier Bouyssounouse, Vinh To, Matthew Deans, Howard Cannon, Terry Fong Resource Prospector Rover Software Team, NASA Ames Research Center Characterization of Stereo Vision Performance for Roving at the Lunar Poles Acknowledgements We would like to thank the continued support and funding from the Resource Prospector Mission and team members. We are grateful for SSERVI’s generous loan of facilities and operational support for this work. Surface rover operations at the polar regions of airless bodies, particularly the Moon, are of particular interest to future NASA science missions such as Resource Prospector (RP). Resource Prospector intends to detect and drill for volatiles in permanently shadowed regions. Polar optical conditions present challenges to conventional imaging techniques, with repercussions to driving, safeguarding and science. Some of these conditions are known from prior (Apollo) surface images, but are believed to be more prominent at the poles. Long cast shadows from oblique illumination create large no-go areas and regions of uncertain hazards. The lack of atmospheric scattering gives a chiaroscuro quality of extreme dynamic range. Regolith backscatter and glare play roles in reducing visual contrast at specific azimuthal angles. No surface rover has yet operated in such polar situations. Approach. RP is currently undertaking an effort to characterize imaging performance in polar conditions for stereo vision and human operation. As appearance is a composition of scene reflectance, geometry and illumination, the key idea is to modulate each of these components in a principled and calibrated way while measuring the results with respect to ground truth. For physical testing, our aim is to reproduce appearance phenomena encountered at the Lunar poles in a laboratory setting. A constellation of near-field, low-angle lights with relevant color temperature, flux, and apparent solar diameter produces stark shadows and high dynamic range. Both JSC-1A and NU-LHT regolith simulants are being utilized for experimentation. Terrain geometry, consisting of rock and crater features sampled from size-frequency distributions in a Monte Carlo manner, are constructed by hand. Terrain test cases and stereo image pairs are ground truthed with state-of-art survey LIDAR scanning which exhibits superior performance in terrestrial conditions. Our test fixture rigidly mounts this sensor along with stereo cameras and prototype rover lighting. HDR, Shadows, and Opposition Featureless White Out Lens Flare and Optics Effects Dust Accumulation NU-LHT vs JSC-1A 4x4m JSC-1A sandbox & lights 1x1m LHT sandbox Monte Carlo rock distribs. Preliminary results of this work show that stereo, with the right optical and algorithmic settings, is promising for use in polar navigation. We believe the true benefit of the approach is not only identifying imaging failure cases, but also in providing a big picture statistical view of performance for risk management. We plan to release this data soon as the first polar stereo vision dataset in order to encourage further development in this area. Rock fields (positive obstacles), craters (negative), and a combination of both types were realized under polar appearance conditions. Analysis. We have collected over 50Gb of stereo image pairs and LIDAR point clouds. Stereo vision is characterized by comparing 3D point clouds from block matching against registered ground truth using density, accuracy, and hazard detection metrics. These are general 3D data quality metrics for reconstruction. In addition to computing quality metrics, we run FASTA to understand performance for automated rover safeguarding. Given pre-set thresholds for "safe" and "dangerous" slopes and drop-offs, FASTA identifies terrain features that would be risky for a rover to navigate. Each point in a FASTA map represents the terrain "goodness" that is then used to plan minimum risk trajectories through the environment. Appearance of the scene changes drastically as the solar azimuth clocks from 30, 180, 270 and 350 degrees. Elevation is a constant 8 deg. Stereo data for this work is provided by a pair of 2MP AVT cameras (1/1.2” CMOS) with 30cm baseline. Each camera has a 12mm lens set at F8.0 giving a horizontal FOV of 50 deg. Optics were chosen to resolve 10cm obstacles at 8m. Ground Truth Sensor †[email protected] Stereo Depth Map LIDAR Ground Truth Stereo Point Cloud Rover Navigation Hazard Map