Christian Böhm Ludwig Maximilians Universität München The Similarity Join: A Powerful Database Primitive for High Performance Data Mining Tutorial, 17th Int. Conf. on Data Engineering, 2001-04-02
Transcript
Christian BöhmLudwig Maximilians Universität München
The Similarity Join: A Powerful Database Primitive for High Performance Data MiningTutorial, 17th Int. Conf. on Data Engineering, 2001-04-02
Christian BöhmLudwig Maximilians Universität München
The Similarity Join: A Powerful Database Primitive for High Performance Data MiningTutorial, 17th Int. Conf. on Data Engineering, 2001-04-02
Chr
isti
an B
öhm
2
150
11Motivation
Motivation
Chr
isti
an B
öhm
3
150
High Performance Data MiningHigh Performance Data Mining
Fast decisions require knowledge just in time
Marketing Fraud Detection CRM Online Scoring OLAP
Chr
isti
an B
öhm
4
150
Previous Approaches to Fast Data MiningPrevious Approaches to Fast Data Mining
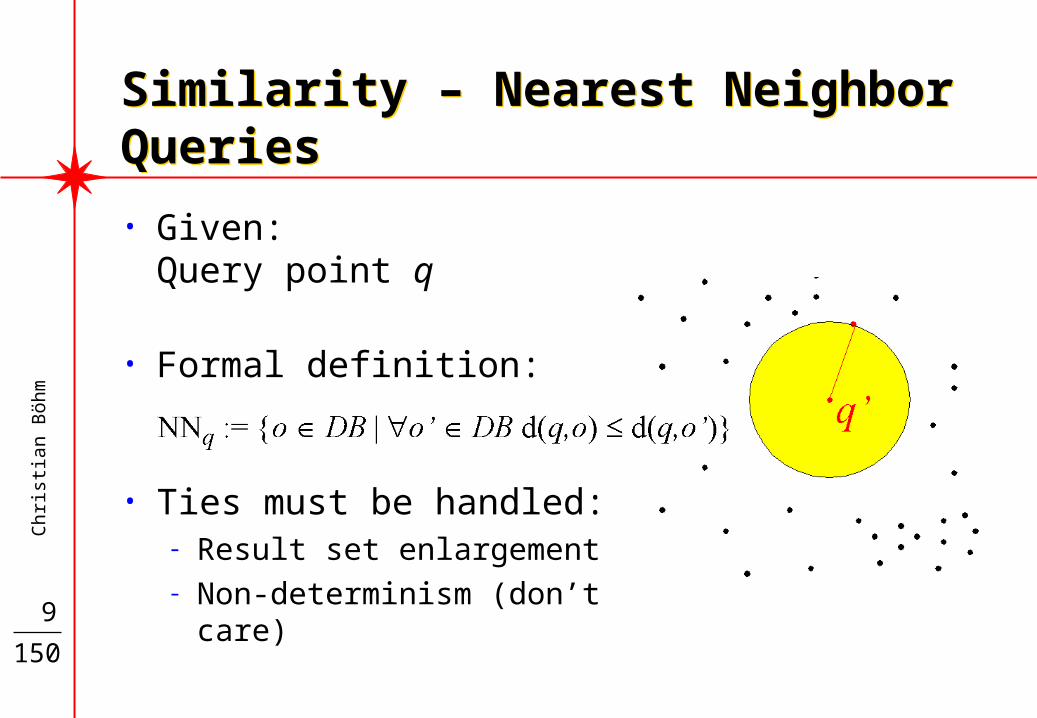
• Ties must be handled:- Result set enlargement- Non-determinism (don’t care)
Chr
isti
an B
öhm
10150
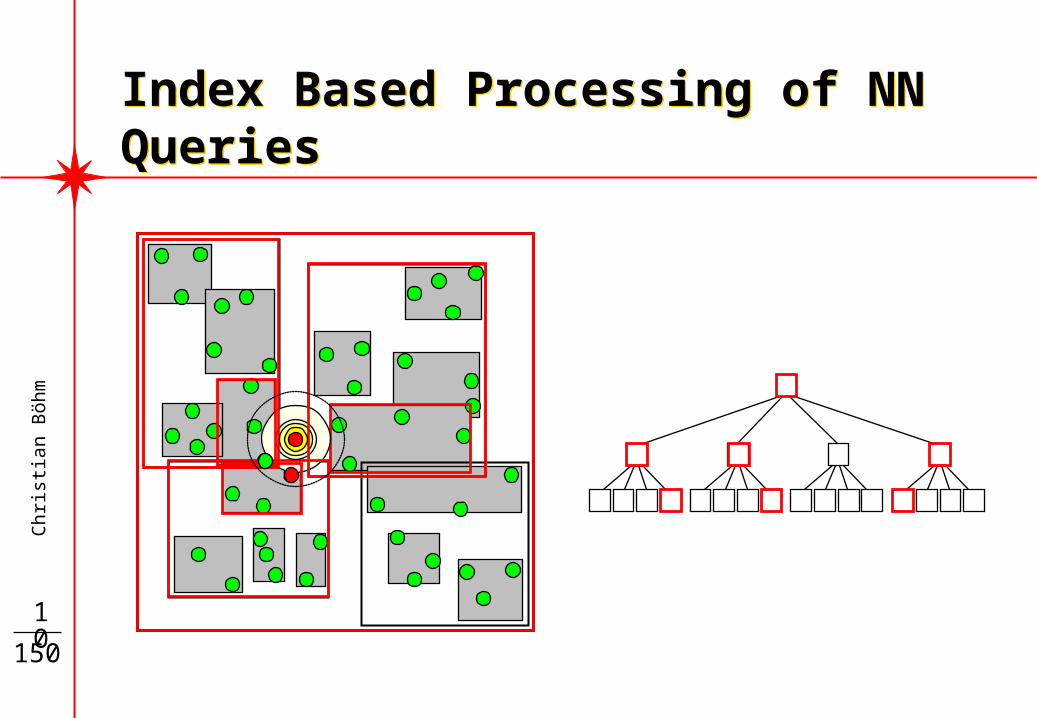
Index Based Processing of NN QueriesIndex Based Processing of NN Queries
Chr
isti
an B
öhm
11150
k-Nearest Neighbor Search and Rankingk-Nearest Neighbor Search and Ranking
• k-nearest neighbor query:- Do not only search only for one nearest neighbor but k
- Stop distance is the distance of the kth (last) candidate point
-
• Ranking-query:- Incremental version of k-nearest neighbor search- First call of FetchNext() returns first neighbor- Second call of FetchNext() returns second neighbor...- Typically only few results are fetched Don‘t generate all!
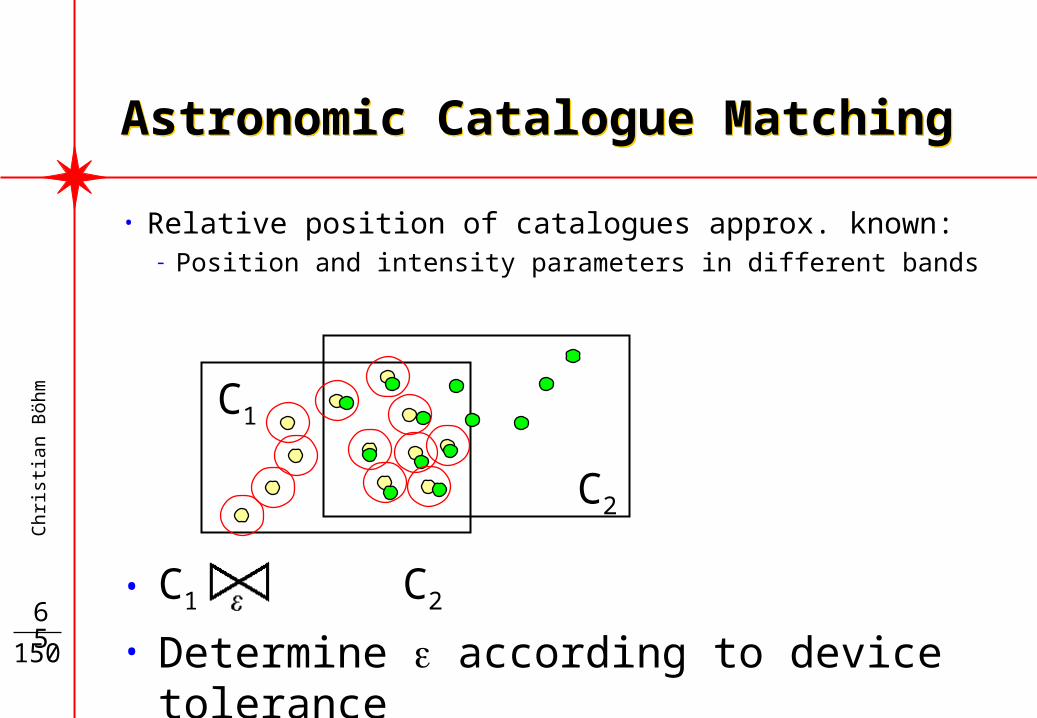
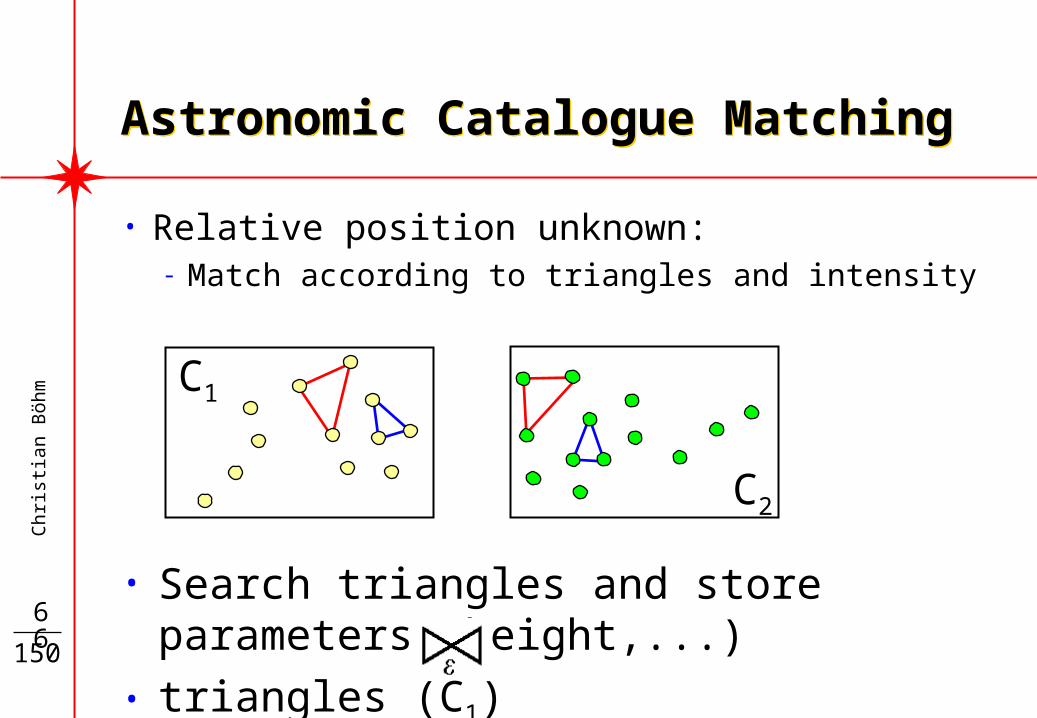
• Duplicate detection- E.g. Astronomic catalogue matching
• Similarity queries for large number of query obj
C1
C2
Chr
isti
an B
öhm
13150
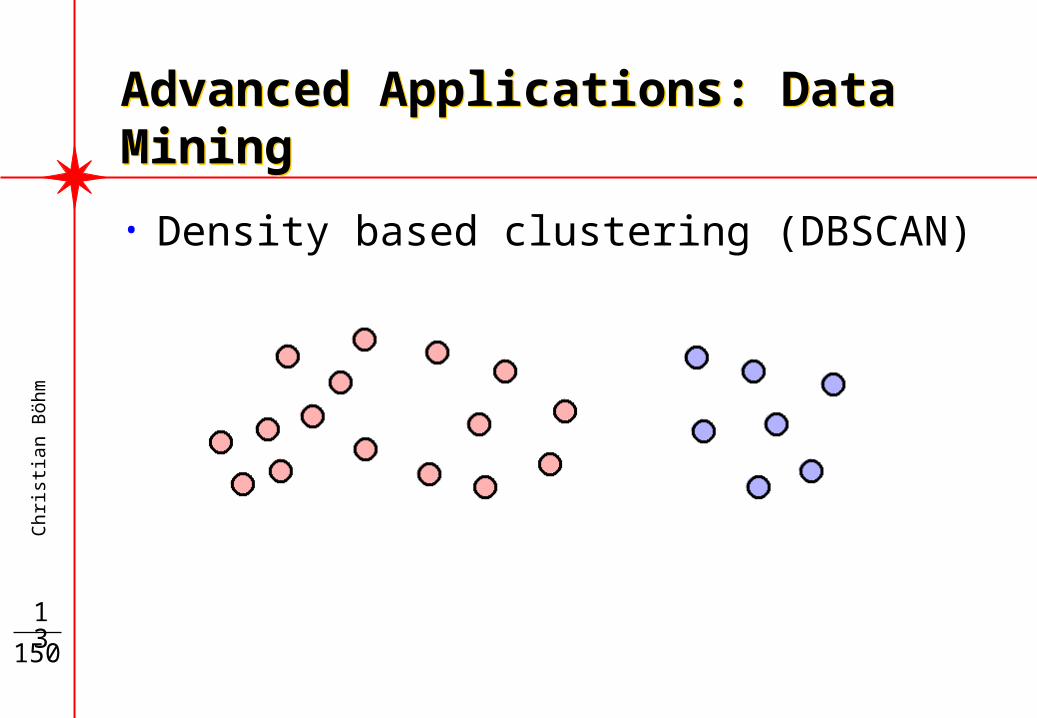
Advanced Applications: Data MiningAdvanced Applications: Data Mining
• Density based clustering (DBSCAN)
Chr
isti
an B
öhm
14150
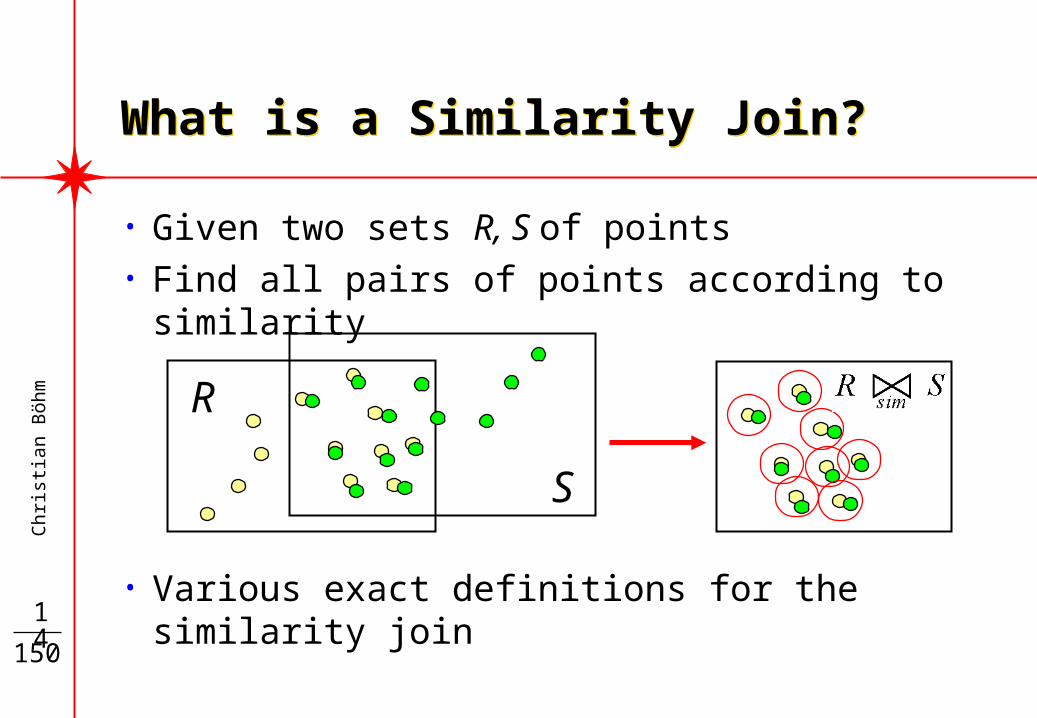
What is a Similarity Join?What is a Similarity Join?
• Given two sets R, S of points• Find all pairs of points according to similarity
• Various exact definitions for the similarity join
R
S
Chr
isti
an B
öhm
15150
What is a Similarity Join?What is a Similarity Join?
• Similarity join corresponds to set of identical similarity queries, evaluated for a large number of query points
• Sequential evaluation of similarity queries with index is the easiest similarity join algorithm
• Many more sophisticated approaches exist• Powerful database primitive to support modern
applications of data analysis and data mining
Chr
isti
an B
öhm
16150
Curse of DimensionalityCurse of Dimensionality
• Index structures fail (outperformed by the sequential scan) if the data space dimension becomes too high
• Many effects usually called Curse of Dimensionality
Chr
isti
an B
öhm
17150
Curse of DimensionalityCurse of Dimensionality
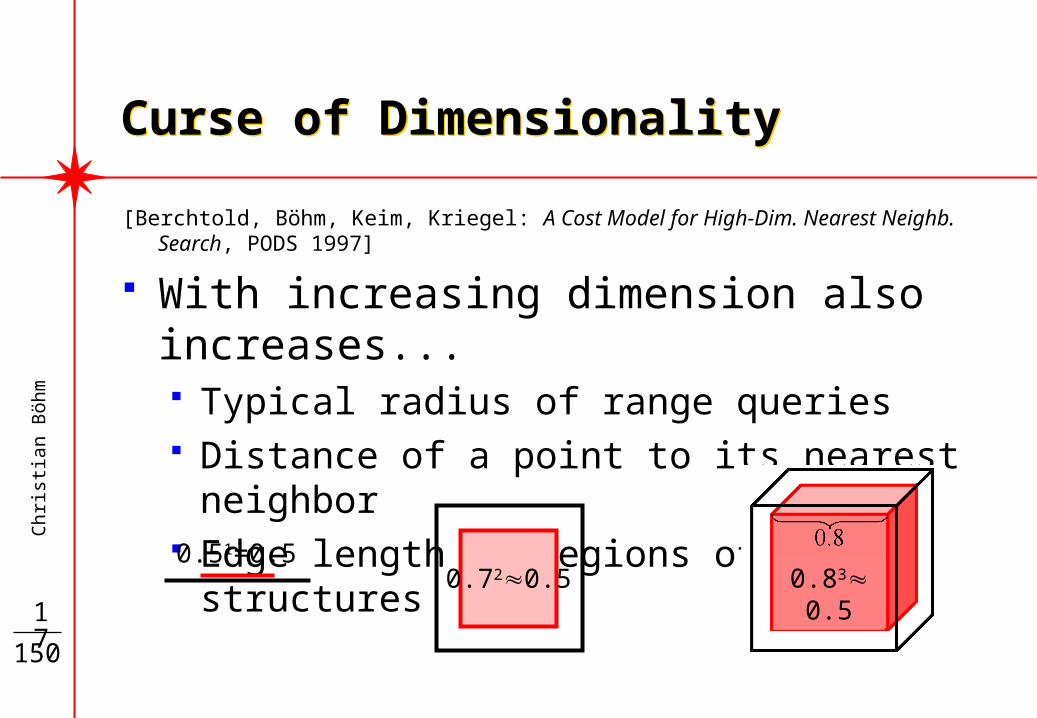
[Berchtold, Böhm, Keim, Kriegel: A Cost Model for High-Dim. Nearest Neighb. Search, PODS 1997]
With increasing dimension also increases... Typical radius of range queries Distance of a point to its nearest neighbor Edge length of regions of index structures
0.51=0.50.720.5 0.830.
5
Chr
isti
an B
öhm
18150
Curse of DimensionalityCurse of Dimensionality
A cost model for the access probability of index pages using the concept of Minkowski Sum
Chr
isti
an B
öhm
19150
Curse of DimensionalityCurse of Dimensionality
Binomial formula:
Chr
isti
an B
öhm
20150
Curse of DimensionalityCurse of Dimensionality
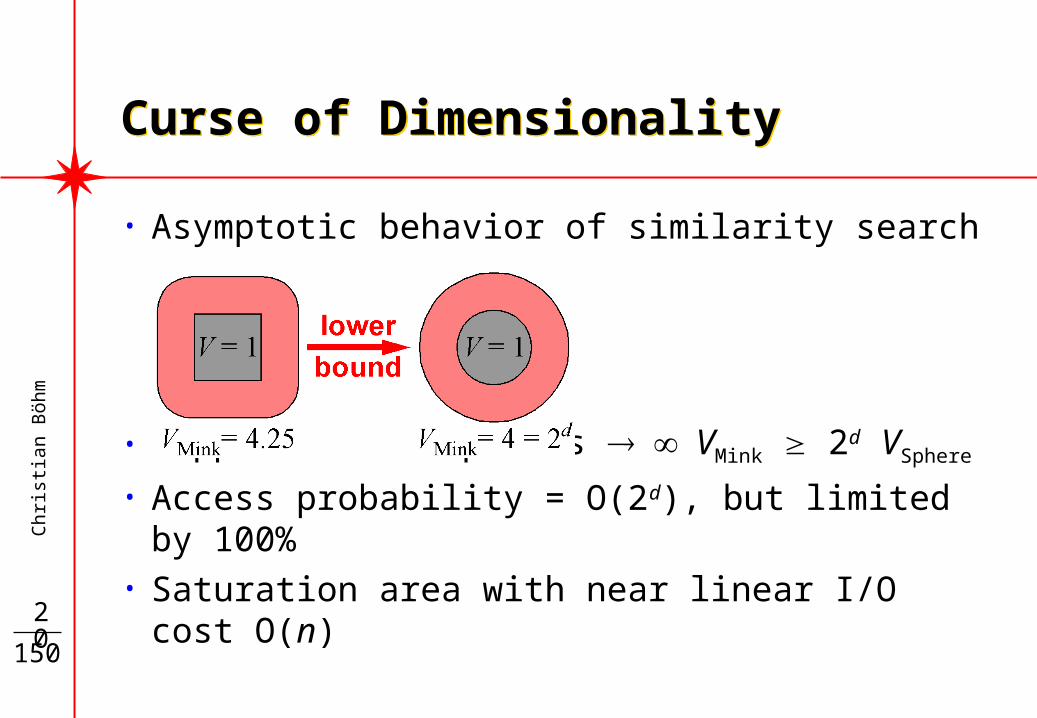
• Asymptotic behavior of similarity search
• Suppose number points VMink 2d VSphere
• Access probability = O(2d), but limited by 100%• Saturation area with near linear I/O cost O(n)
Chr
isti
an B
öhm
21150
Curse of DimensionalityCurse of Dimensionality
• For high dimension: Each similarity query accesses considerable fraction of all index pages.
• Index does not pay off, anyway sequ. scan• Strategies needed for efficient evaluation• Join: Base applications on powerful database
primitive that exploits high number of queries• Efficient algorithms for Similarity Join
Chr
isti
an B
öhm
22150
Organization of the TutorialOrganization of the Tutorial
1. Motivation
2. Defining the Similarity Join
3. Applications of the Similarity Join
4. Similarity Join Algorithms
5. Conclusion & Future Potential
Chr
isti
an B
öhm
23150
22Defining the Similarity JoinDefining the Similarity Join
Chr
isti
an B
öhm
24150
What Is a Similarity Join?What Is a Similarity Join?
Intuitive notion: 3 properties of the similarity join1. The similarity join is a join in the relational sense
Two sets R and S are combined into one such that the new set contains pairs of points that fulfill a join condition
2. Vector or metric objects rather than ordinary tuples of any type
3. The join condition involves similarity
Chr
isti
an B
öhm
25150
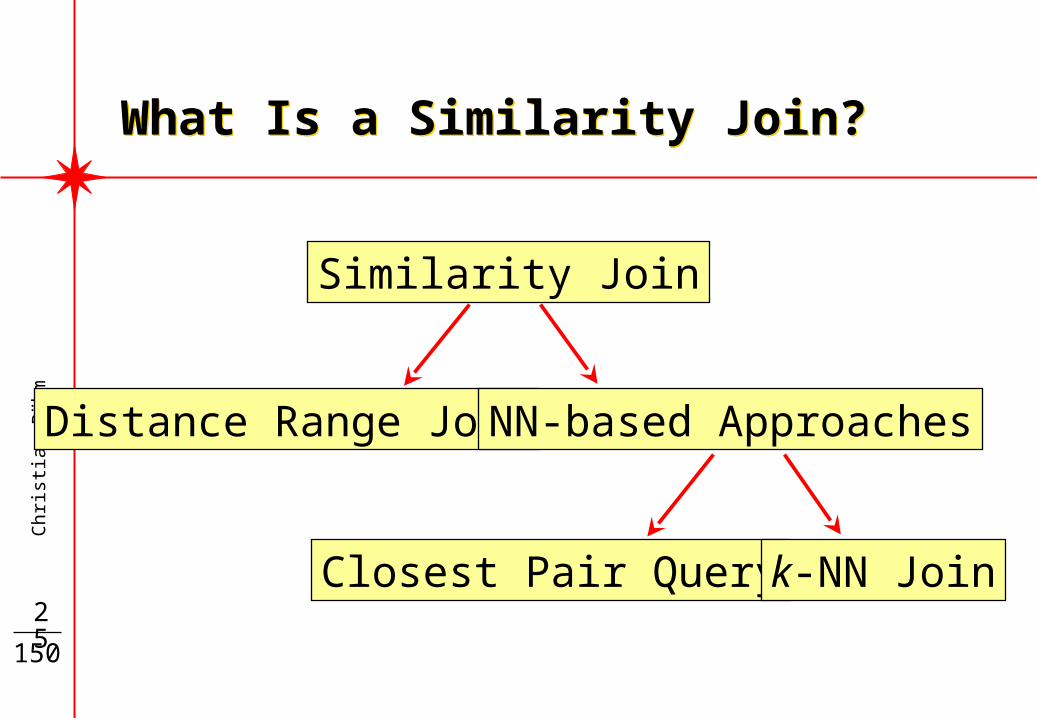
What Is a Similarity Join?What Is a Similarity Join?
Similarity Join
Distance Range Join NN-based Approaches
Closest Pair Query k-NN Join
Chr
isti
an B
öhm
26150
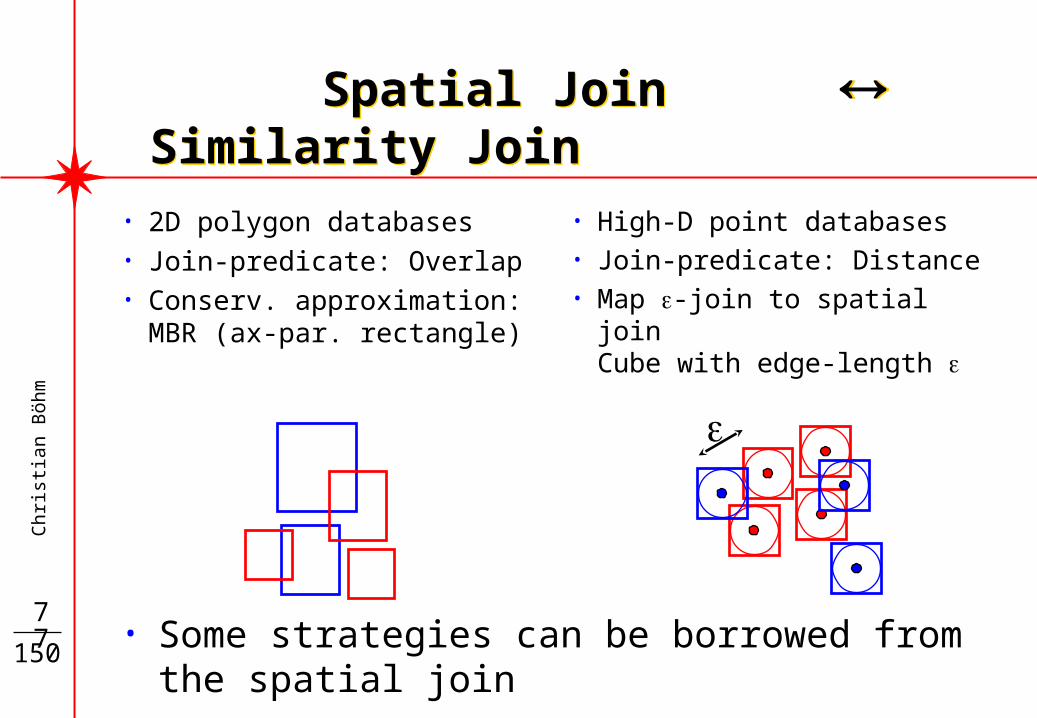
Distance Range Join (-Join)Distance Range Join (-Join)
• Intuitition: Given parameter All pairs of points where distance
• Formal Definition:
• In SQL-like notation:SELECT * FROM R, S WHERE ||R.obj S.obj||
Chr
isti
an B
öhm
27150
Distance Range Join (-Join)Distance Range Join (-Join)
• Most widespread and best evaluated join • Often also called the similarity join
Chr
isti
an B
öhm
28150
Distance Range Join (-Join)Distance Range Join (-Join)
• The distance range self join
is of particular importance for data mining (clustering) and robust similarity search
• Change definition to exclude trivial results•
Chr
isti
an B
öhm
29150
Distance Range Join (-Join)Distance Range Join (-Join)
• Disadvantage for the user:Result cardinality difficult to control: too small no result pairs are produced too large all pairs from R S are produced
• Worst case complexity is at least o(|R||S|)• For reasonable result set size, advanced join
algorithms yield asymptotic behavior which is better than O(|R||S|)
Chr
isti
an B
öhm
30150
k-Closest Pair Queryk-Closest Pair Query
• Intuition: Find those k pairs that yield least distance
• The principle of nearest neighbor search is applied on a basis per pair
• Classical problem of Computational Geometry• In the database context introduced by
[Hjaltason & Samet, Incremental Distance Join Algorithms, SIGMOD Conf. 1998] • There called distance join
Chr
isti
an B
öhm
31150
k-Closest Pair Queryk-Closest Pair Query
• Formal Definition:
• Ties solved by result set enlargement
• Other possibility: Non-determinism(don’t care which of the tie tuples are reported)
Chr
isti
an B
öhm
32150
k-Closest Pair Queryk-Closest Pair Query
In SQL notation: SELECT * FROM R, SORDER BY ||R.obj S.obj||STOP AFTER k
Chr
isti
an B
öhm
33150
k-Closest Pair Queryk-Closest Pair Query
• Self-join:- Exclude |R| trivial pairs (ri,ri) with distance 0
- Result is symmetric
• Applications:- Find all pairs of stock quota in a database that are
most similar to each other- Find music scores which are similar to each other- Noise robust duplicate elimination
Chr
isti
an B
öhm
34150
k-Closest Pair Queryk-Closest Pair Query
• Incremental ranking instead of exact specification of k
• No STOP AFTER clause:
SELECT * FROM R, S ORDER BY ||R.obj S.obj||
• Open cursor and fetch results one-by-one• Important: Only few results typically fetched
Don’t determine the complete ranking
Chr
isti
an B
öhm
35150
k-Nearest Neighbor Joink-Nearest Neighbor Join
• Intuition: Combine each point with its k nearest neighbors
• The principle of nearest neighbor search is applied for each point of R
• In the database context introduced by[Hjaltason & Samet, Incremental Distance Join Algorithms, SIGMOD Conf. 1998]
• There called distance semijoin
Chr
isti
an B
öhm
36150
k-Nearest Neighbor Joink-Nearest Neighbor Join
• Formal Definition:
• Ties solved by result set enlargement
• Other possibility: Non-determinism(don’t care which of the tie tuples are reported)
Chr
isti
an B
öhm
37150
k-Nearest Neighbor Joink-Nearest Neighbor Join
In SQL notation:(limited to k = 1)
SELECT * FROM R, SGROUP BY R.objORDER BY ||R.obj S.obj||STOP AFTER K (* k *)
Chr
isti
an B
öhm
38150
k-Nearest Neighbor Joink-Nearest Neighbor Join
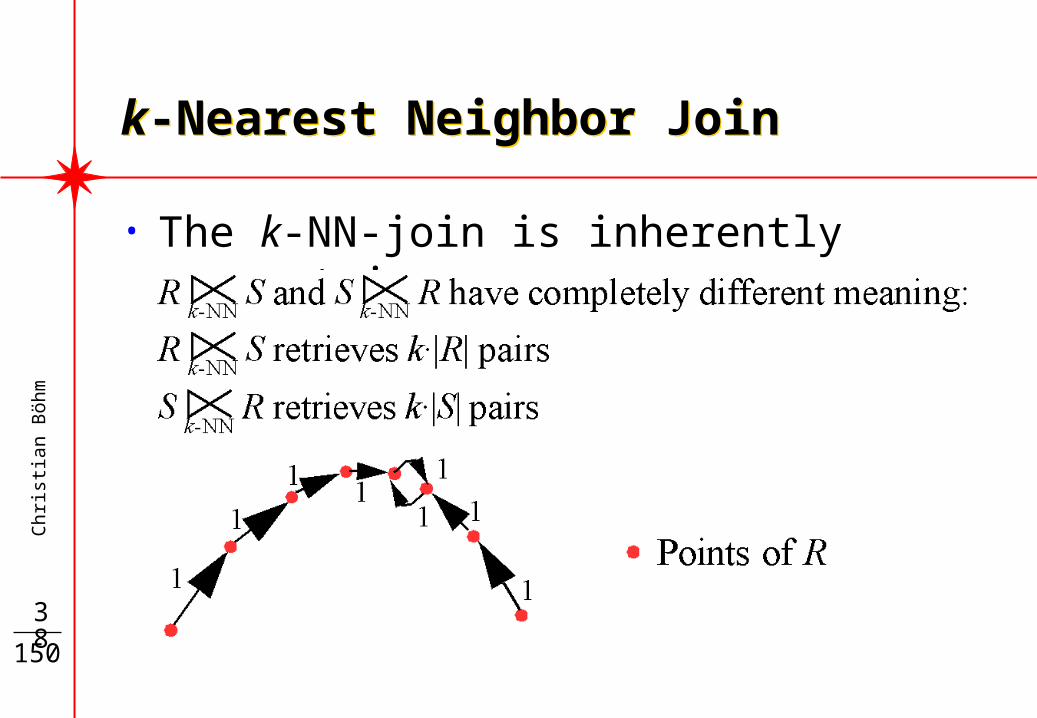
• The k-NN-join is inherently asymmetric:
Chr
isti
an B
öhm
39150
k-Nearest Neighbor Joink-Nearest Neighbor Join
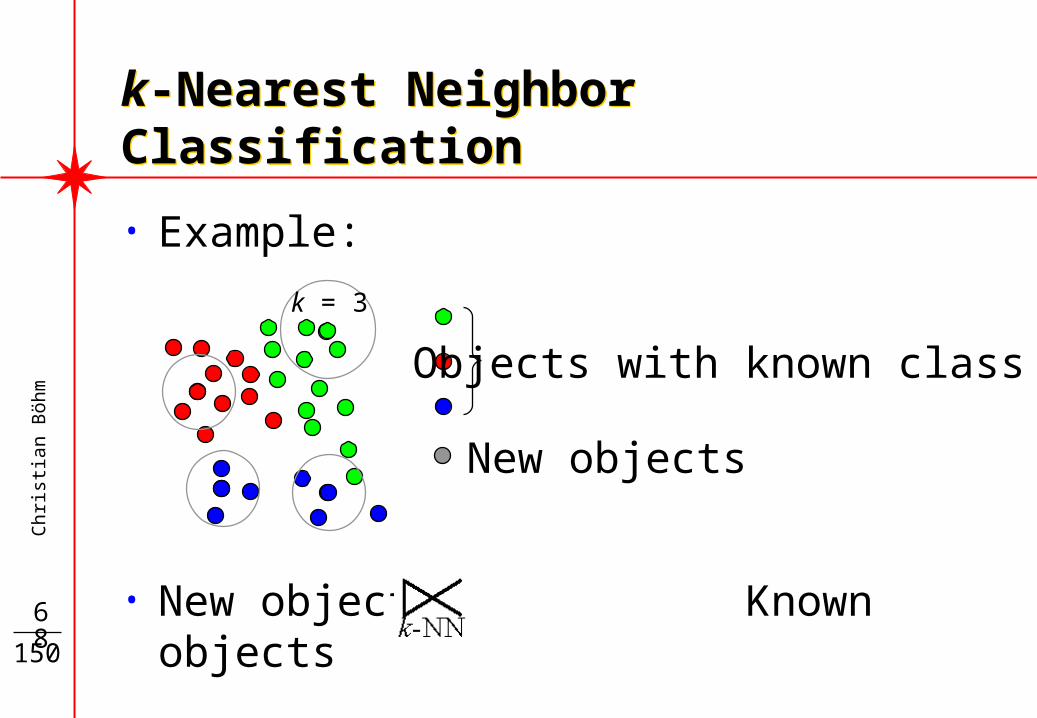
• Applications of the k-NN-join:- k-means and k-medoid clustering- Simultaneous nearest neighbor classification:
A large set of new objects without class label are assigned according to the majority of k nearest neighbors of each of the new objects
• Astronomic observation• Online customer scoring
• Ranking on the k-NN-join is difficult to define
Chr
isti
an B
öhm
40150
Further possible definitionsFurther possible definitions
• Inverse nearest neighbor join:Combine each point ri of R with every point of S which considers ri to be its nearest neighbor
• Metric data sets:Instead of vectors use arbitrary objects with a distance metric- E.g. Text sequences with edit distance- Text mining using the similarity join applies A*
Chr
isti
an B
öhm
41150
33ApplicationsApplications
Chr
isti
an B
öhm
42150
Density Based Data MiningDensity Based Data Mining
Chr
isti
an B
öhm
43150
Schema for Data Mining AlgorithmsSchema for Data Mining Algorithms
Algorithmic Schema A1
foreach Point p DPointSet S := SimilarityQuery (p,
);foreach Point q S
DoSomething (p,q) ;
Chr
isti
an B
öhm
44150
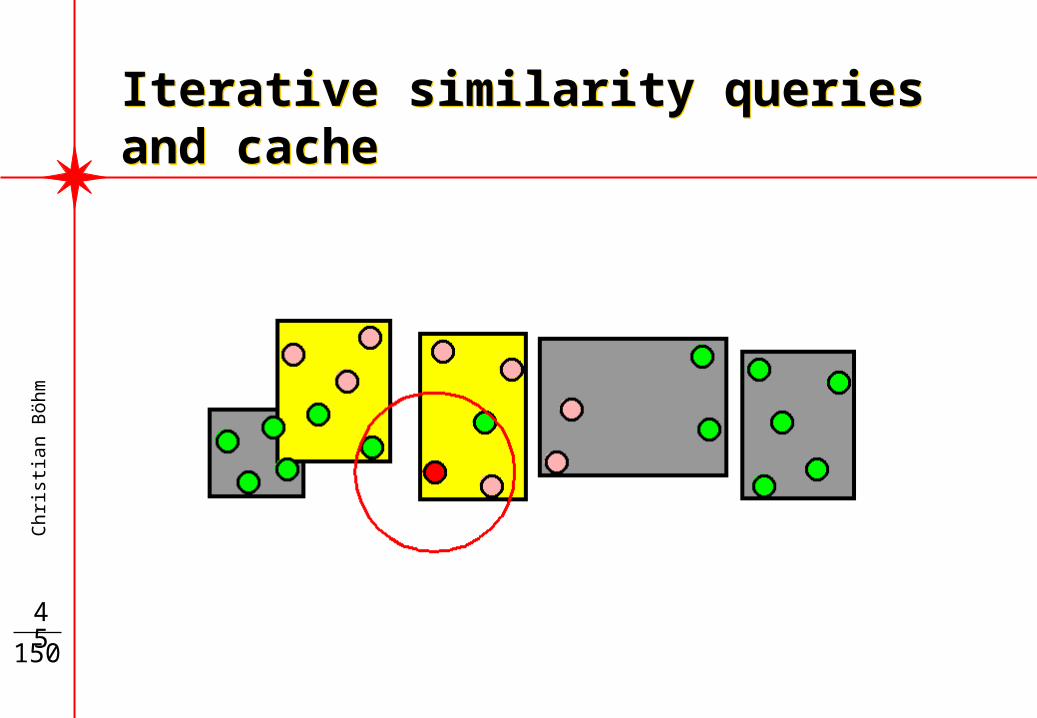
Iterative similarity queries and cacheIterative similarity queries and cache
Due to curse of dimensionality:No sufficient inter-query locality of the pages
0,00
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0 10 20 30 40Dimension (d )
Ave
rag
e ca
che
hit
rat
io
10-nn querysim. range query
Chr
isti
an B
öhm
45150
Iterative similarity queries and cacheIterative similarity queries and cache
Chr
isti
an B
öhm
46150
Idea: Query Order TransformationIdea: Query Order Transformation
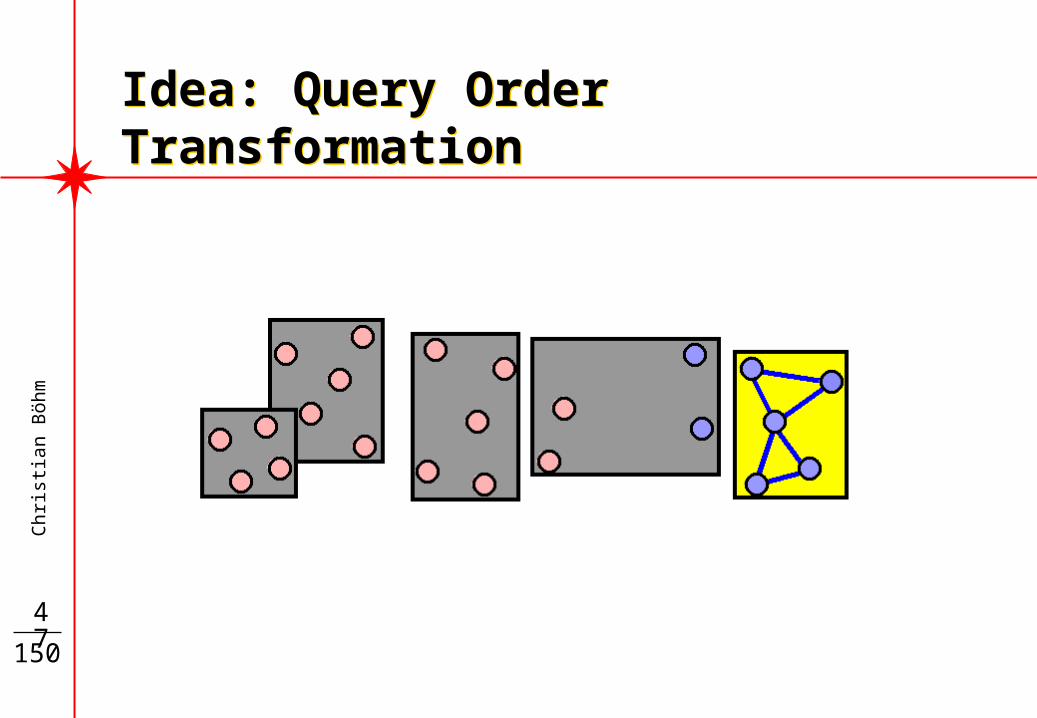
[Böhm, Braunmüller, Breunig, Kriegel: High Perf. Clustering based on the Sim. Join, CIKM 2000]
Transform order of similarity queries such that packing of points into pages is considered
If one pair of index pages is in the cache: process all sim. queries regarding this pair
Each pair of pages is considered at most once
Chr
isti
an B
öhm
47150
Idea: Query Order TransformationIdea: Query Order Transformation
Chr
isti
an B
öhm
48150
Transform the Original Schema A1…Transform the Original Schema A1…
Algorithmic Schema A1
foreach Point p DPointSet S := SimilarityQuery (p,
);foreach Point q S
DoSomething (p,q) ;
Chr
isti
an B
öhm
49150
…Into a New Algorithmic Schema A2…Into a New Algorithmic Schema A2
if (mindist (P,Q) )CachedAccess (Q) ;foreach Point p P
foreach Point q Qif (distance (p,q) )
DoSomething’ (p,q) ;UnFixPage (P) ;
Chr
isti
an B
öhm
50150
Similarity JoinSimilarity Join
A2 is a Similarity-Join-Algorithm:
foreach PointPair (p,q) DoSomething’ (p,q) ;
Where denotes the Similarity-Join:
SELECT * FROM R r1, R r2
WHERE distance (r1.object, r2.object)
Chr
isti
an B
öhm
51150
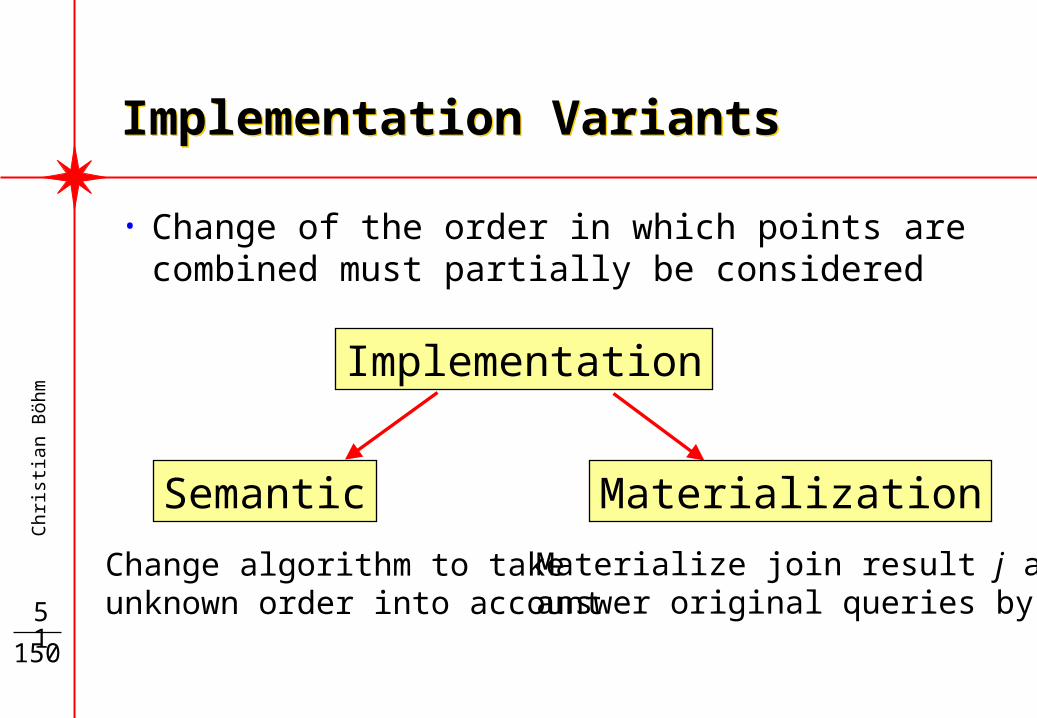
Implementation VariantsImplementation Variants
• Change of the order in which points are combined must partially be considered
Implementation
Semantic Materialization
Change algorithm to take unknown order into account
Materialize join result j and answer original queries by j
Chr
isti
an B
öhm
52150
Example Clustering AlgorithmsExample Clustering Algorithms
DBSCAN[Ester, Kriegel, Sander, Xu: A Density Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise´, KDD 1996]
Flat clustering (non hierarchical)
OPTICS[Ankerst, Breunig, Kriegel, Sander: OPTICS: Ordering Points To Identify the Clustering Structure, SIGMOD Conf. 1999]
Hierachicalcluster-structure
1
2
3
Semantic Rewriting Materialization
Chr
isti
an B
öhm
53150
Transformation by Semantic RewritingTransformation by Semantic Rewriting
• Rewrite the algorithm to take the changed order of pairs into account
• Don´t assume any specific order in which pairs are generated Arbitrary similarity join algorithm possible
Chr
isti
an B
öhm
54150
Example: DBSCANExample: DBSCAN
p core object in D wrt. , MinPts: | N (p) | MinPts p directly density-reachable from q in D wrt. , MinPts:
1) p N(q) and 2) q is a core object wrt. , MinPts
density-reachable: transitive closure.
cluster:- maximal wrt. density reachability- any two points are density-reachable from
a third object
Chr
isti
an B
öhm
55150
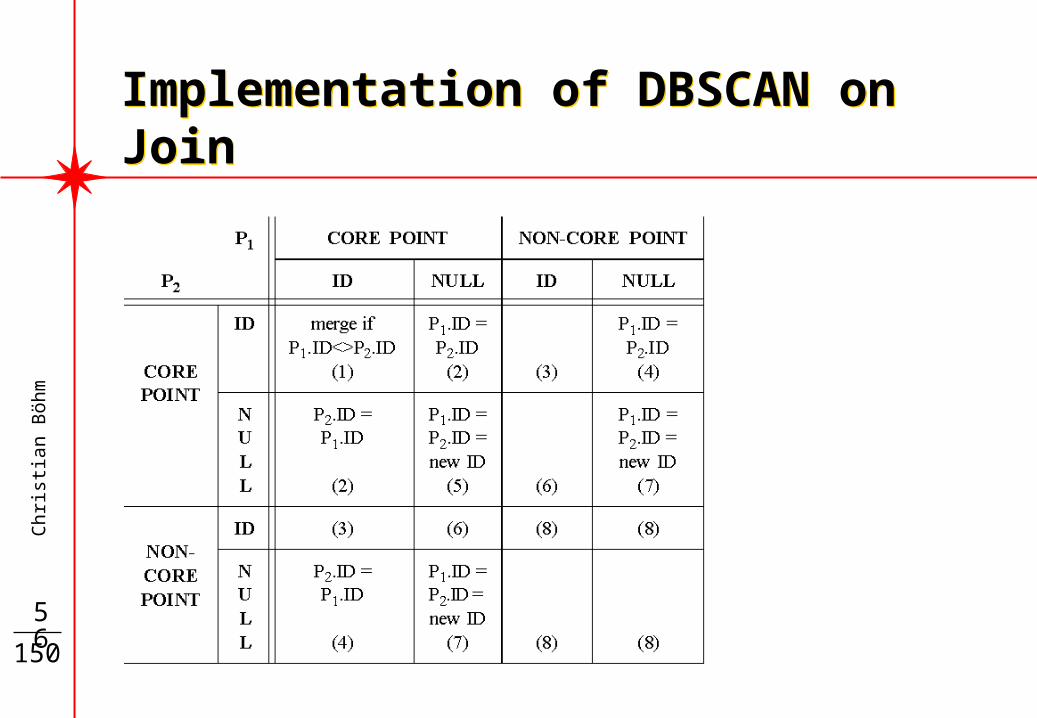
Implementation of DBSCAN on JoinImplementation of DBSCAN on Join
Core point property:DoSomething() increments a counter attribute
Determination of maximal density-reachable clusters:DoSomething():- Assign ID of known cluster point to unknown cluster points - Unify two known clusters
Chr
isti
an B
öhm
56150
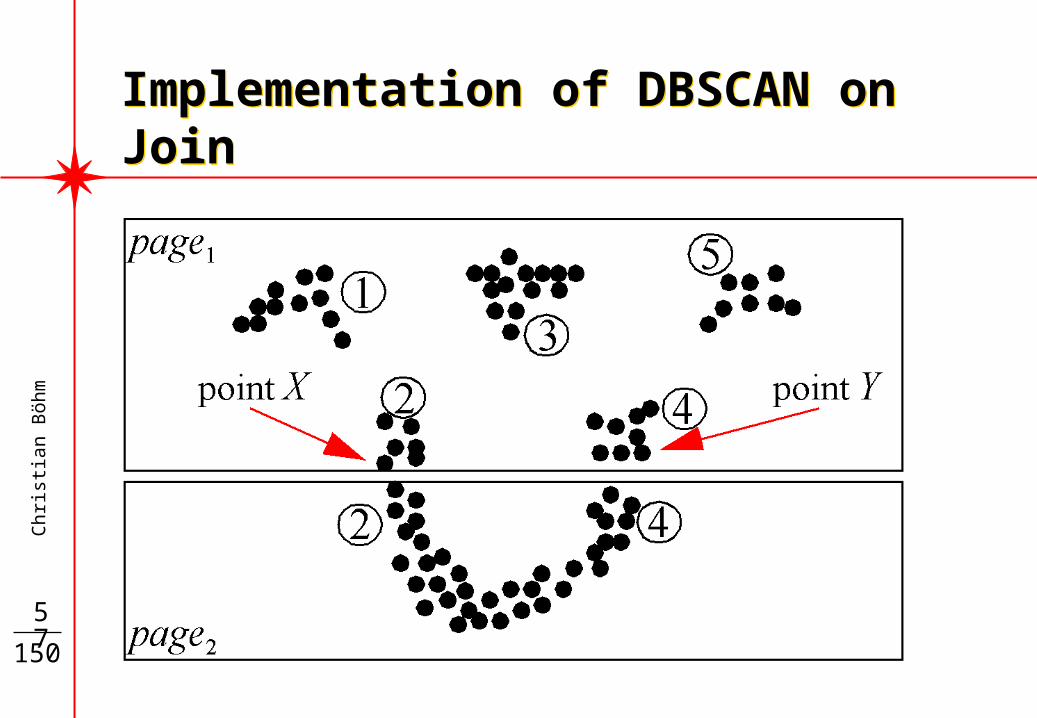
Implementation of DBSCAN on JoinImplementation of DBSCAN on Join
Chr
isti
an B
öhm
57150
Implementation of DBSCAN on JoinImplementation of DBSCAN on Join
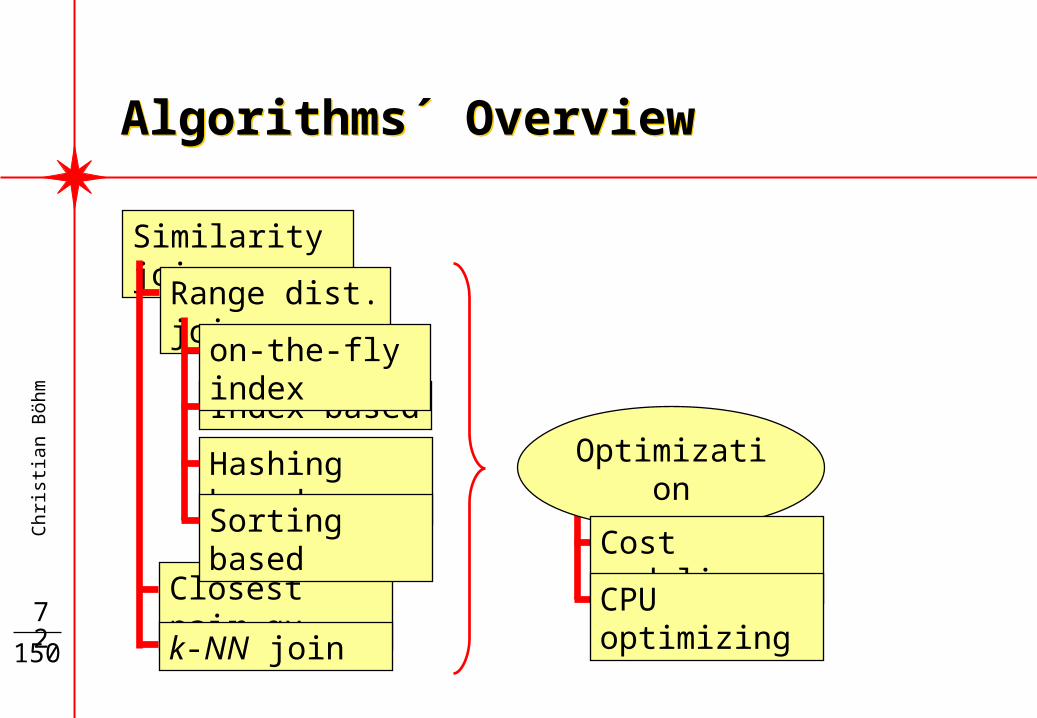
Distance range join (-join) Index joins with depth-first and breadth-first search
[Brinkhoff, Kriegel, Seeger: Efficient Proc. of Spatial Joins Using R-trees, SIGMOD Conf. 1993][Brinkhoff, Kriegel, Seeger: Parallel Processing of Spatial Joins Using R-trees, ICDE 1996][Huang, Jing, Rundensteiner: Spatial Joins Usg. R-trees: Breadth-First Traversal..., VLDB 1997]
Index construction on-the-fly[Lo, Ravishankar: Spatial Joins Using Seeded Trees, SIGMOD Conf. 1994][Shim, Srikant, Agrawal: High-dimensional Similarity Joins, ICDE 1997][Shafer, Agrawal: Parallel Algorithms for High-dimensional Similarity Joins, VLDB 1997][van den Bercken, Schneider, Seeger: Plug&Join, EDBT 2000]
Join-algorithms based on hashing[Lo, Ravishankar: Spatial Hash Joins, SIGMOD Conf. 1996][Patel, DeWitt: Partition Based Spatial-Merge Join, SIGMOD Conf. 1997]
Chr
isti
an B
öhm
74150
Algorithms´ OverviewAlgorithms´ Overview
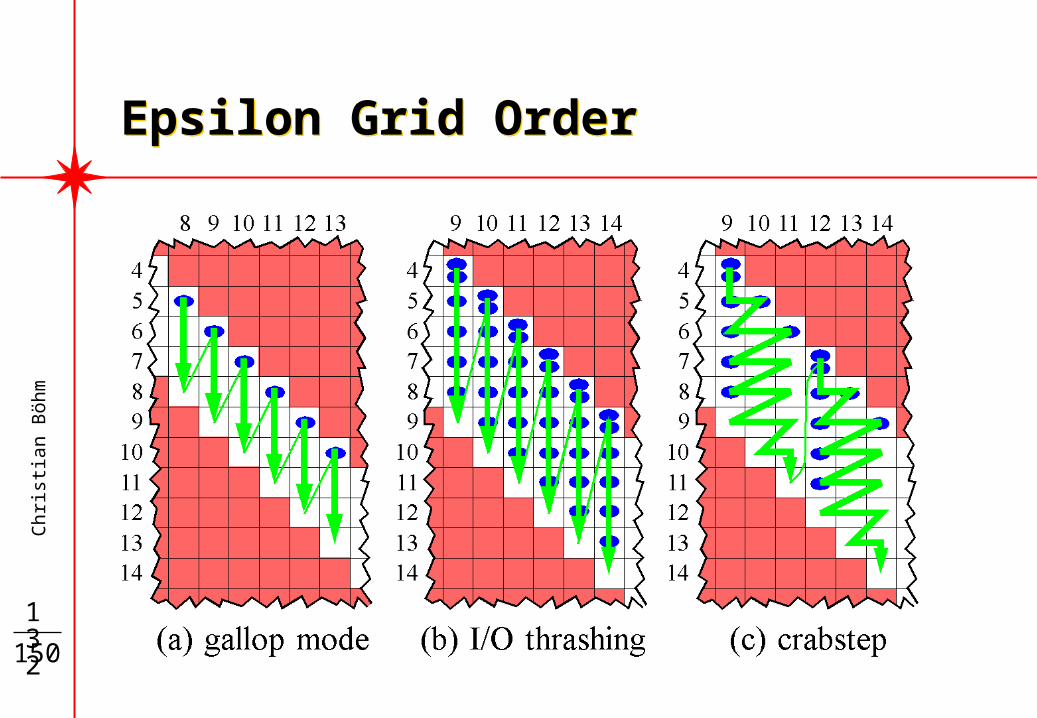
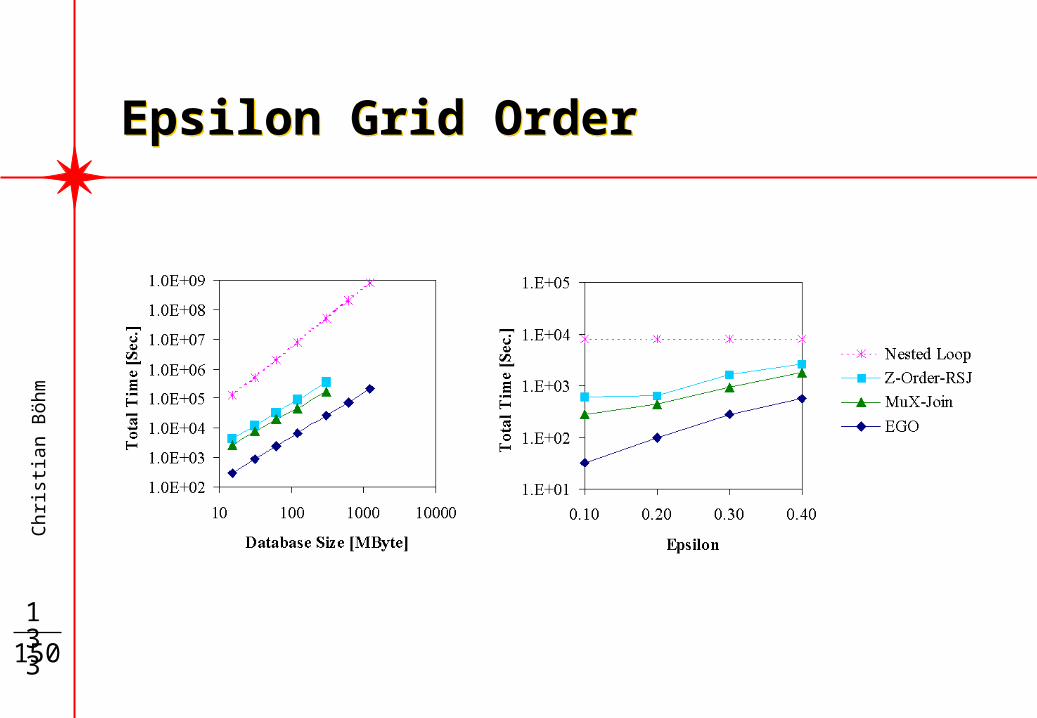
Join-algorithms based on sorting[Orenstein: An Algorithm for Computing the Overlay of k-Dim. Spaces, SSD 1991][Koudas, Sevcik: High-Dimensional Similarity Joins, ICDE 1997][Böhm, Braunmüller, Krebs, Kriegel: Epsilon Grid Order, SIGMOD Conf. 2001]
Optimization approaches[Böhm, Kriegel: A Cost Model and Index Architecture for the Similarity Join, Wednesday 1630][Böhm, Krebs, Kriegel: Optimal Dimension Sweeping: A Generic Technique, submitted]
Chr
isti
an B
öhm
75150
Nested Loop JoinNested Loop Join
• Simple nested loop join:- Iterate over R-points- Nested iteration over S-points
S is scanned |R| times, high I/O cost
• Nested block loop join:- First iterate over blocks- Nested iterate over tuples
S scanned |R|/|B| times
R S
S-tuples
R-t
uple
s
S-bl
ocks
R-b
lock
s
Chr
isti
an B
öhm
76150
Indexed Nested Loop JoinIndexed Nested Loop Join
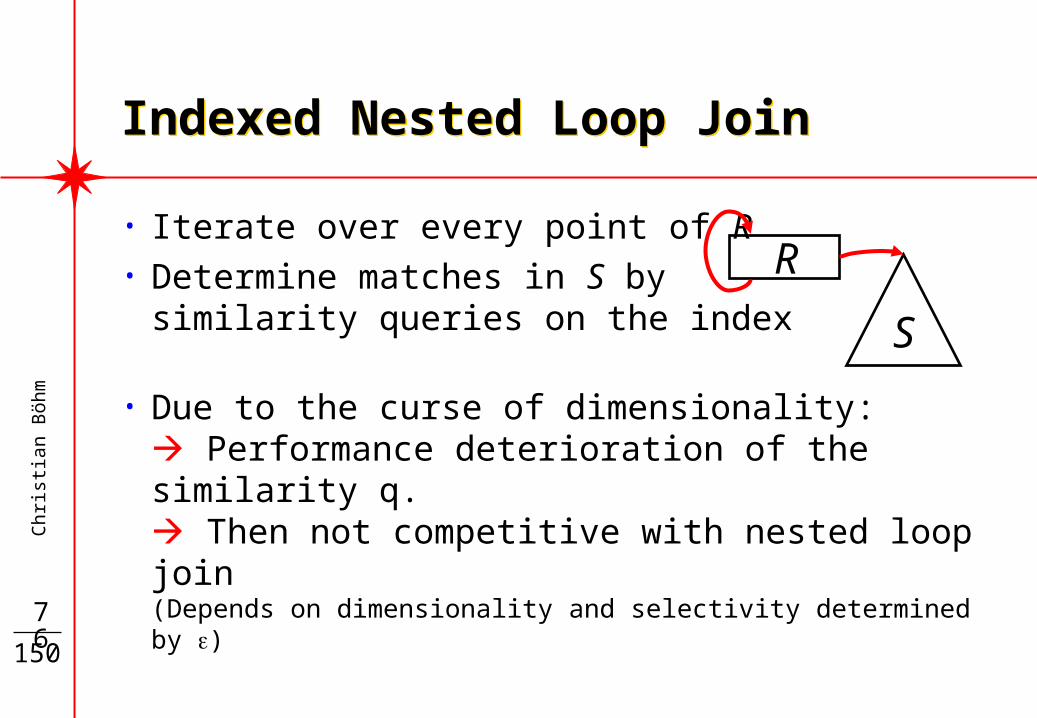
• Iterate over every point of R• Determine matches in S by
similarity queries on the index
• Due to the curse of dimensionality: Performance deterioration of the similarity q. Then not competitive with nested loop join(Depends on dimensionality and selectivity determined by )
[Brinkhoff, Kriegel, Seeger: Efficient Process. of Spatial Joins Using R-trees, SIGMOD Conf. 1993]
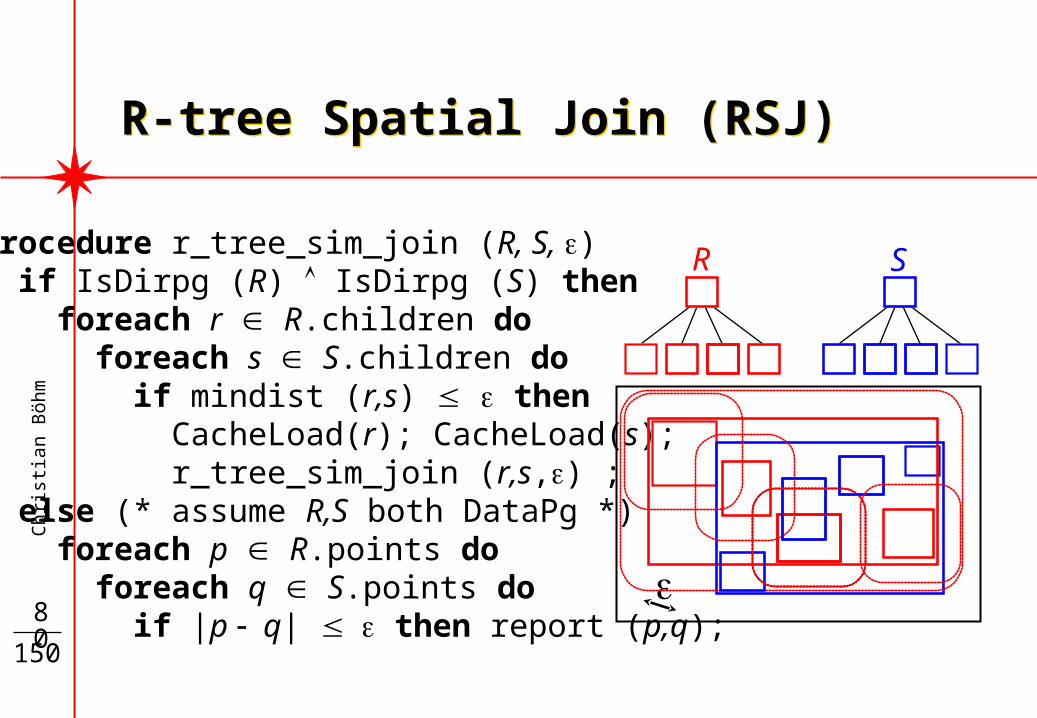
• Originally: Spatial join for 2D rect. intersection• Depth-first search in R-trees and similar indexes• Assumption: Index preconstructed on R and S• Simple recursion scheme (equal tree height):
procedure r_tree_join (R, S: page) foreach r R.children do foreach s S.children do if intersect (r,s) then r_tree_join (r,s) ;
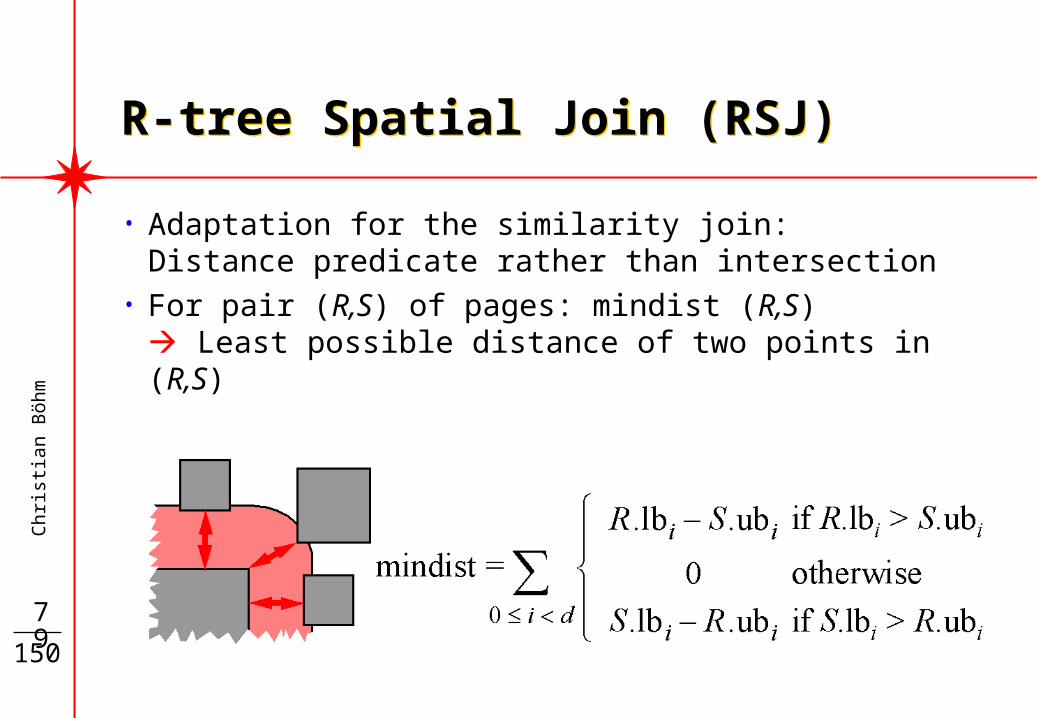
procedure r_tree_sim_join (R, S, ) if IsDirpg (R) IsDirpg (S) then foreach r R.children do foreach s S.children do if mindist (r,s) then CacheLoad(r); CacheLoad(s); r_tree_sim_join (r,s,) ; else (* assume R,S both DataPg *) foreach p R.points do foreach q S.points do if |p q| then report (p,q);
[Lo, Ravishankar: Spatial Joins Using Seeded Trees, SIGMOD Conf. 1994]
• Again spatial join for 2D rectangle intersection• Assumption:
Only one data set (R) is supported by index• Typical application:
Set S is subquery result• Idea:
Use partitioning of R as a template for S
Chr
isti
an B
öhm
94150
Seeded TreesSeeded Trees
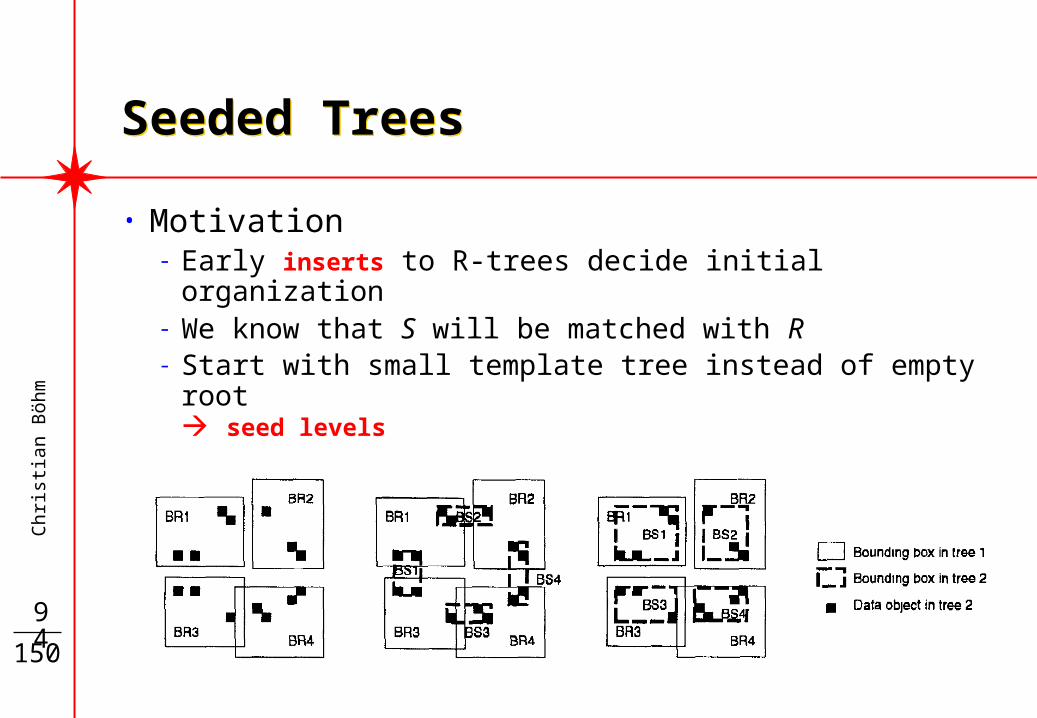
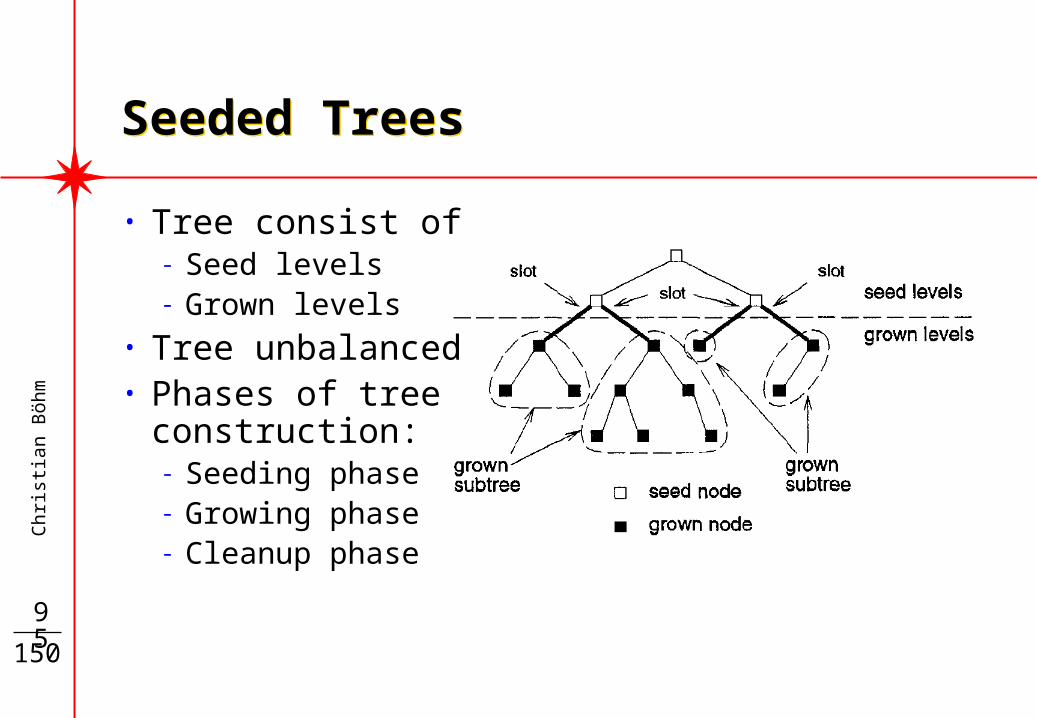
• Motivation- Early inserts to R-trees decide initial organization- We know that S will be matched with R- Start with small template tree instead of empty root
• Seeding phase:- Copy k levels of the R-tree of set R- Last level: defined MBRs, but empty child pointers
called slot
- Three strategies for (slot and other) MBRs:• Copy complete MBR• Use only center point rather than complete MBR• Center point at slot level, otherwise complete MBR
Chr
isti
an B
öhm
97150
Seeded TreesSeeded Trees
• Growing phase- Insert of points: Choose subtree like in R*-tree- Seed level is not affected during growth phase:
• No insertions to seed level nodes• No split of seed level nodes
- If point is inserted into empty slot (NULL pointer):• A new empty data node is allocated• Further, this node is treated like a root in R-trees:
on overflow, no split is propagated upward (new root)• The R-trees in the slots are called grown subtree.
Chr
isti
an B
öhm
98150
Seeded TreesSeeded Trees
• Growing phase (cont...)- Various strategies for update of the MBRs in the
seed levels during insert operations:• No updates• Enlarge bounding box after insert of a not contained point• Determine minimum bounding rectangle after insert• ...
- In seed levels: In general, the page regions are ...• Not bounding rectangles, i.e. no conservative appx. of set• Not minimal
Chr
isti
an B
öhm
99150
Seeded TreesSeeded Trees
• Cleanup Phase- The MBR property of page regions is needed ...
• ... not for tree construction• ... but for join processing
- Therefore, actual MBRs are determined in cleanup- Empty slots (without grown subtrees) are deleted- No attempt to make the tree balanced
• General idea: Grid approximation where grid line distance =
• Not all dimensions used for decomposition:As many dimensions as needed defined node capacity
Chr
isti
an B
öhm
102150
The -kdB-treeThe -kdB-tree
Chr
isti
an B
öhm
103150
The -kdB-treeThe -kdB-tree
• Node fanout: 1/(assuming data space [0..1]d)• Tree structure is specific to given parameter
must be constructed for each join• The -kdB-trees of two adjacent stripes are
assumed to fit into main memory
Chr
isti
an B
öhm
104150
The -kdB-treeThe -kdB-tree
procedure t_match (R, S: node) if is_leaf (R) is_leaf (S) then ... else for i:=1 to 1/1 do t_match(R.child[i], S.child [i]) ; t_match (R.child[i], S.child [i+1]) ; t_match (R.child[i+1], S.child[i]) ; t_match (R.child[1/], S.child[1/]) ;
Chr
isti
an B
öhm
105150
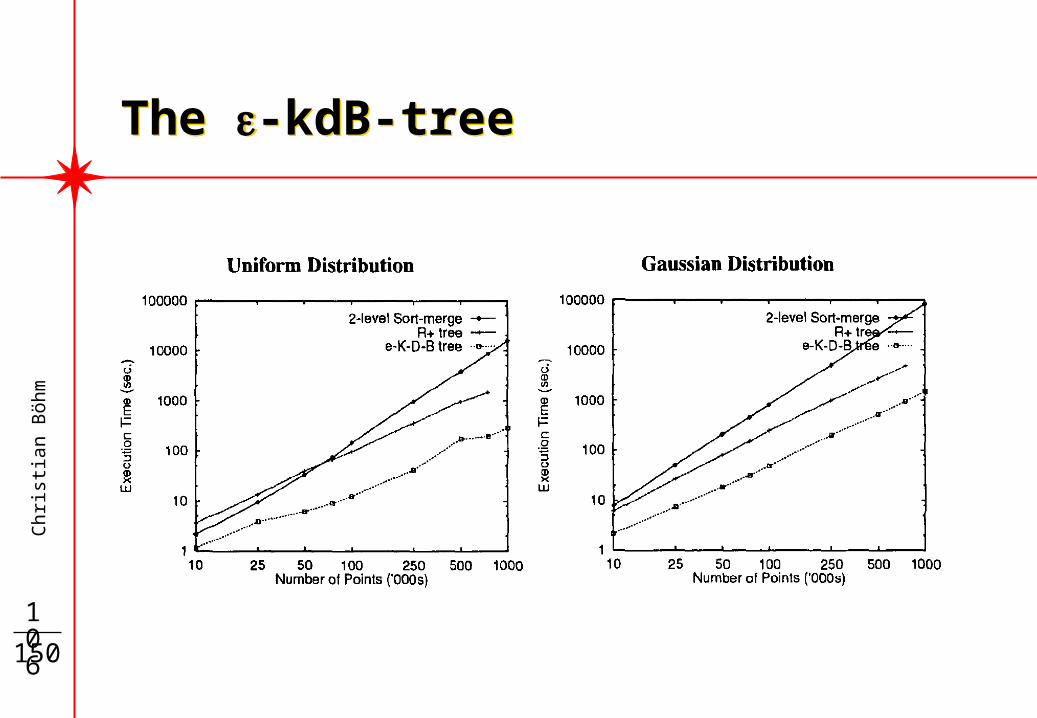
The -kdB-treeThe -kdB-tree
• Limitation:For large values not really scalable
• In high-dimensional cases, =0.3 can be typical 60% of data must be held in main memory
• As long as data fit into main memory:-kdB-tree is one of the best similarity join alg.
• Unfortunately:IBM does not provide any code for comparison
Chr
isti
an B
öhm
106150
The -kdB-treeThe -kdB-tree
Chr
isti
an B
öhm
107150
The Parallel -kdB-treeThe Parallel -kdB-tree
[Shafer, Agrawal: Parallel Algorithms for High-dimensional Similarity Joins, VLDB 1997]
• Parallel construction of the -kdB-tree:- Each processor has random subset of the data (1/N)- Each processor constructs -kdB-tree of its own set- Identical structure is enforced e.g. by split broadcast
CPU1 CPU2
Chr
isti
an B
öhm
108150
The Parallel -kdB-treeThe Parallel -kdB-tree
• Workload distribution:- Global determination of the cumulated node sizes- A unit workload is a pair (r,s) of leaf nodes- The cost of a workload is
|r||s| for different leaves and |r|(|r|+1)/2 for a single leaf (self join)
- Data is redistributed: Each processor gets 1/N work• join units are clustered to preserve locality• minimize redistribution (communication) and replication
Chr
isti
an B
öhm
109150
The Parallel -kdB-treeThe Parallel -kdB-tree
• Workload execution:- delete internal structure- cum. node size too large
second growth phase- data redistribution per-
formed asynchronously:Data sent in depth-first order of tree traversal to avoid network flooding
Chr
isti
an B
öhm
110150
The Parallel -kdB-treeThe Parallel -kdB-tree
Chr
isti
an B
öhm
111150
Plug & JoinPlug & Join
[van den Bercken, Schneider, Seeger: Plug&Join: An Easy-to-Use Generic Algorithm, EDBT 2000]
Generic technique for several kinds of join- Main-memory R-tree constructed from R-sample- Partition R and S acc. to R-tree (buffers at leaves)
• Method for the spatial join using replication- Set R is partitioned without replication- Set S is partitioned according to R‘s buckets;
replication if intersection with more than 1 R-bucket- Join only corresponding buckets
Chr
isti
an B
öhm
113150
Spatial Hash JoinSpatial Hash Join
• Partitioning of R:- Using bootstrap-seeding, generates a seeded tree- A suitable number # of slots is determined- The set R is sampled (sample size c #)- Using some clustering method, # cluster centers are
determined in the set- The cluster centers are the slots in the seeded tree- Assign each R-obj. to slot with least enlargement
Chr
isti
an B
öhm
114150
Spatial Hash JoinSpatial Hash Join
• Partitioning of S and join phase:- Bucket extents of R are copied to S-buckets- For spatial join: Each object s of S is assigned ...
... to all buckets b which are intersected by s- For similarity join:
... to all buckets b with mindist (s,b) - All corresponding bucket pairs (r,s) are joined by
constructing a quadratic split-R-tree on r.- Each obj in s is probed to the R-tree on r.
Chr
isti
an B
öhm
115150
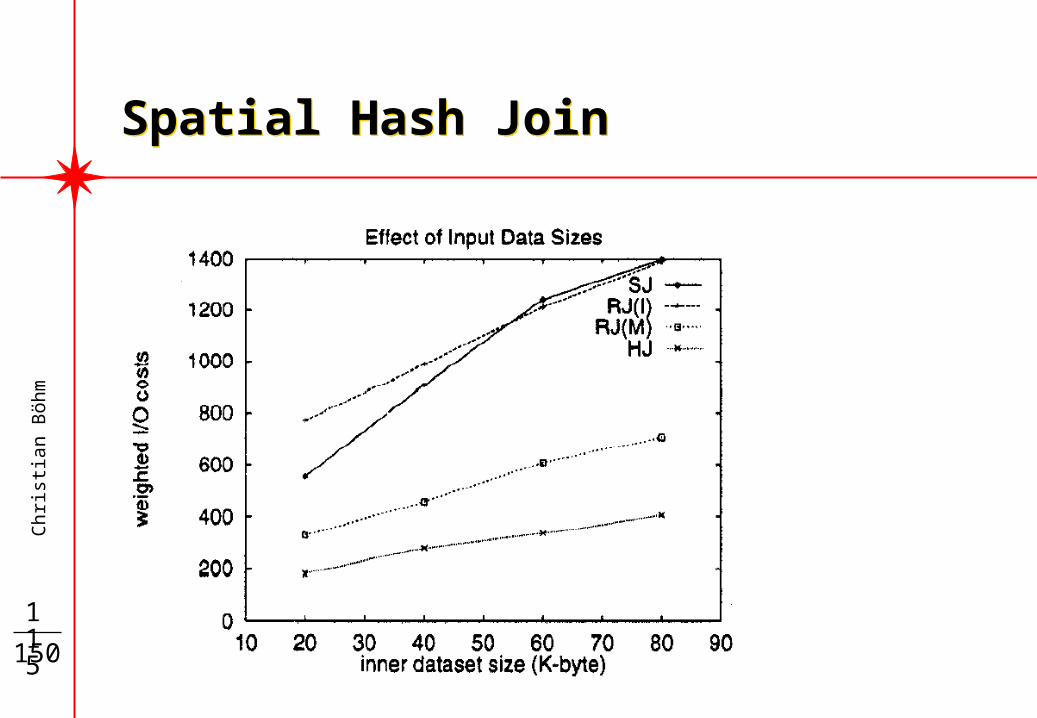
Spatial Hash JoinSpatial Hash Join
figure 6
Chr
isti
an B
öhm
116150
Partition Based Spatial Merge JoinPartition Based Spatial Merge Join
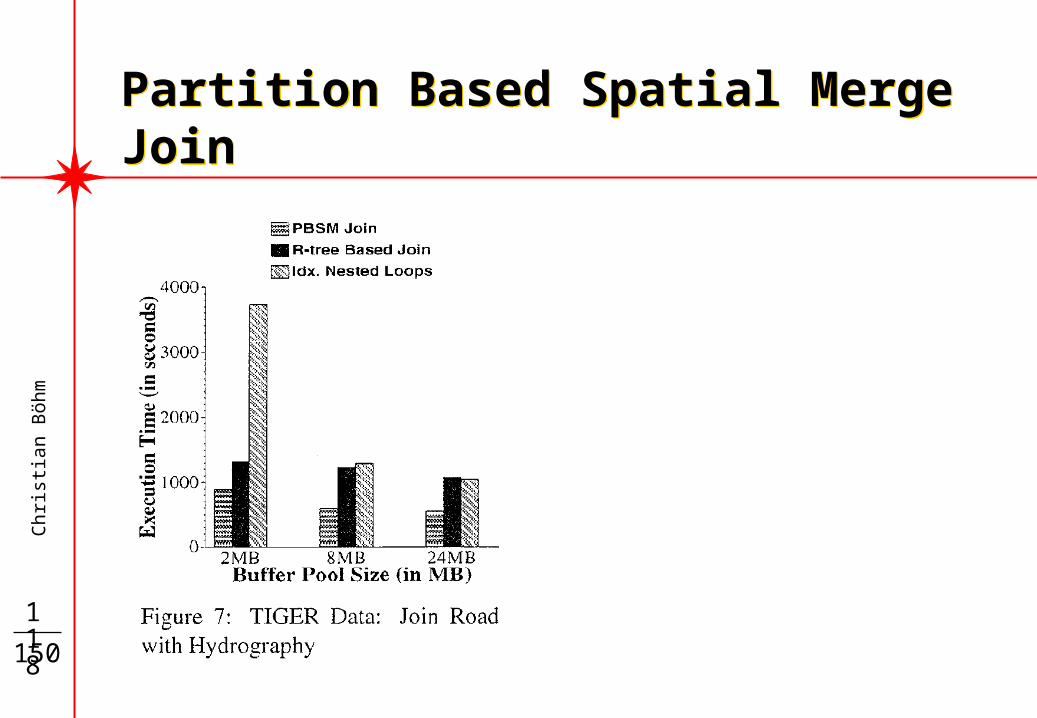
[Patel, DeWitt: Partition Based Spatial-Merge Join, SIGMOD Conf. 1997]
• Again spatial join method using replication- Both sets R and S are partitioned with replication- Space is regularly decomposed into tiles- Partitions either corre-
spond to tiles or are determined from them using hashing
Chr
isti
an B
öhm
117150
Partition Based Spatial Merge JoinPartition Based Spatial Merge Join
• Duplicate pairs can be generated duplicate elimination by sorting according to (OIDR, OIDS)
• Initial number of partitions determined: (|R| + |S|) size_pt / memsizeThis formula does not take into account:- replication- data skew
Chr
isti
an B
öhm
118150
Partition Based Spatial Merge JoinPartition Based Spatial Merge Join
Chr
isti
an B
öhm
119150
Approaches Using Space Filling CurvesApproaches Using Space Filling Curves
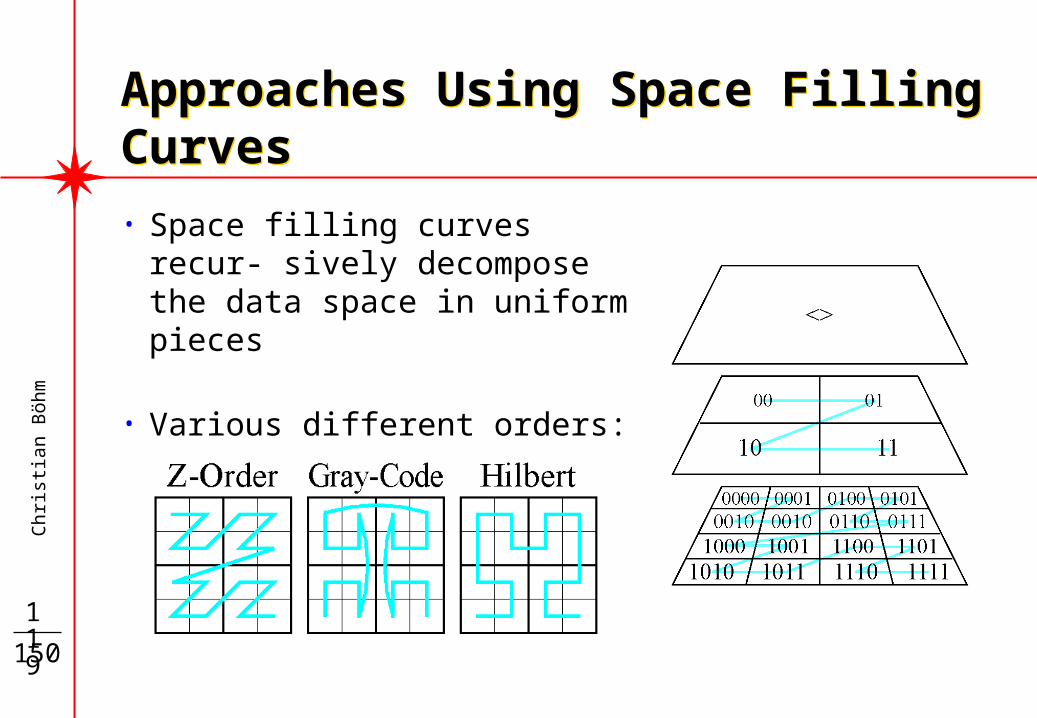
• Space filling curves recur- sively decompose the data space in uniform pieces
• Various different orders:
Chr
isti
an B
öhm
120150
Approaches Using Space Filling CurvesApproaches Using Space Filling Curves
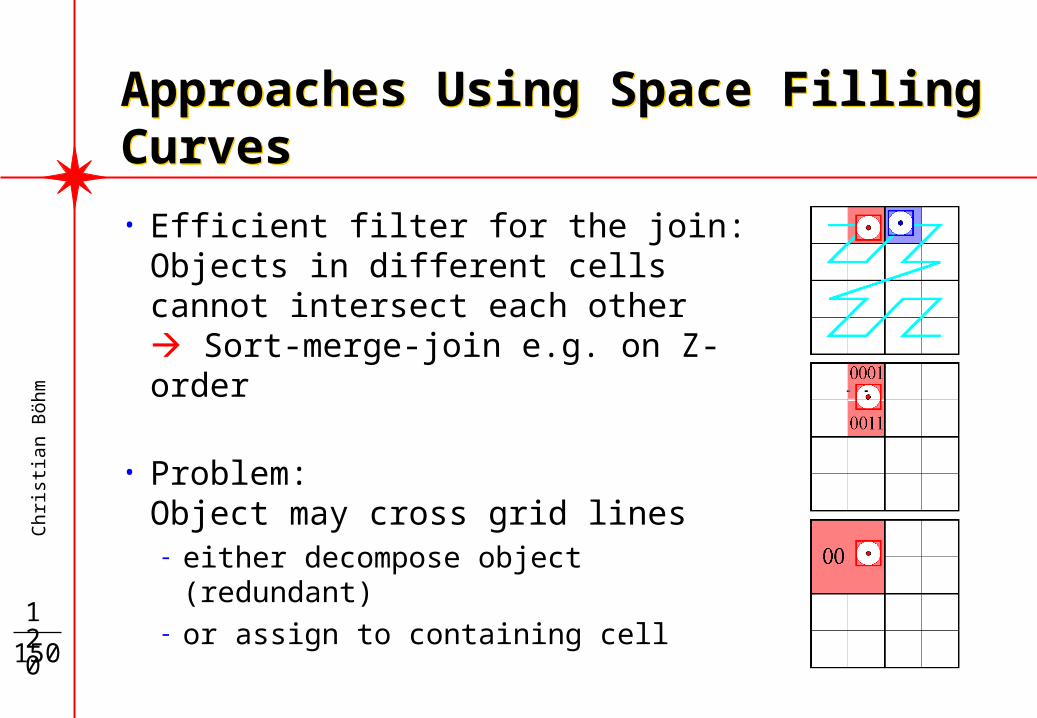
• Efficient filter for the join:Objects in different cells cannot intersect each other Sort-merge-join e.g. on Z-order
• Problem:Object may cross grid lines- either decompose object (redundant)- or assign to containing cell
Chr
isti
an B
öhm
121150
Approaches Using Space Filling CurvesApproaches Using Space Filling Curves
• If all cells have uniform size: Equi-join on grid cell numbers (bit strings)
• If cells have varying size: Bit strings of varying length
• Objects may intersect ...- if bitstr (r) is prefix of bitstr (s)- or bitstr (s) is prefix of bitstr (r)
Chr
isti
an B
öhm
122150
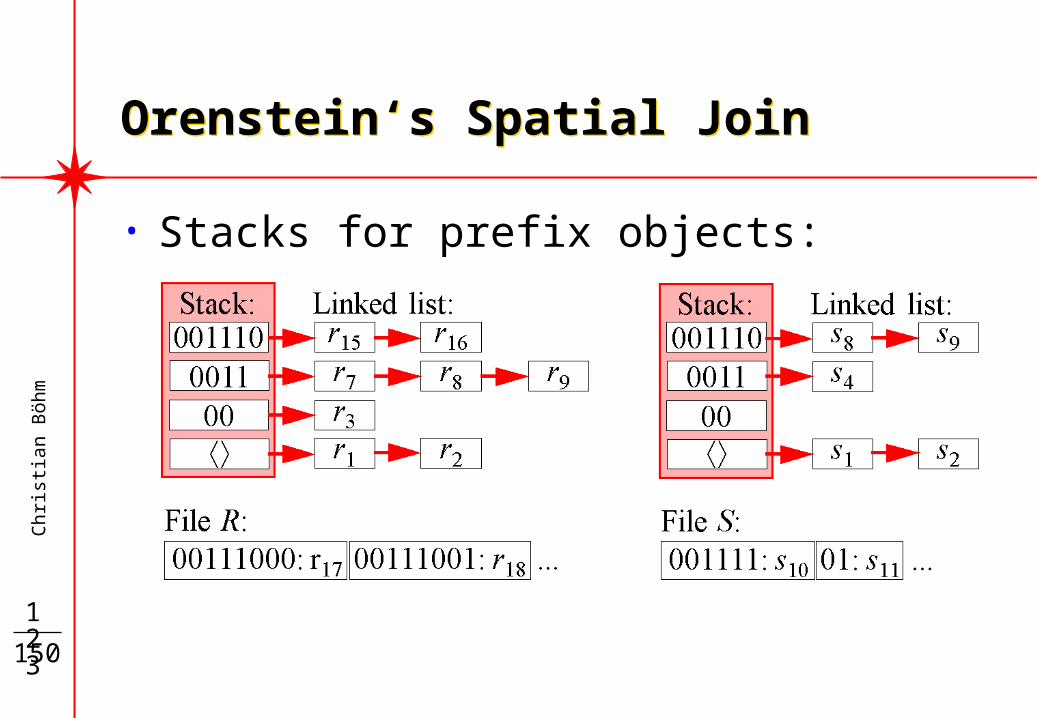
Orenstein‘s Spatial JoinOrenstein‘s Spatial Join
[Orenstein: An Algorithm for Computing the Overlay of k-Dim. Spaces, SSD 1991]
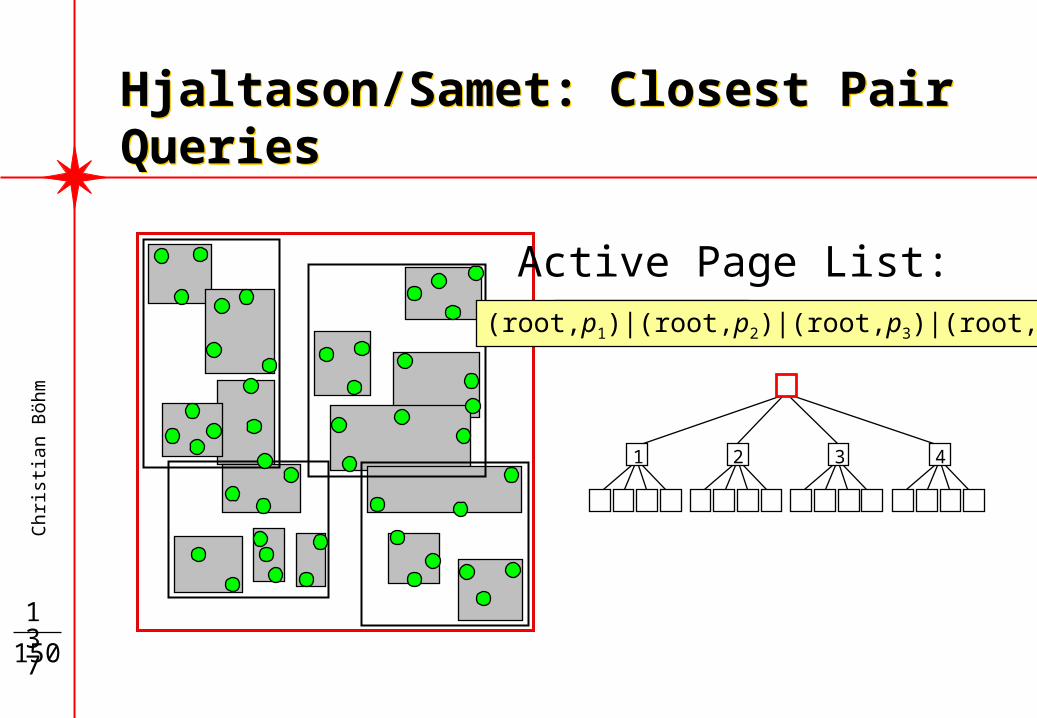
• Nearest Neighbor Closest Pair Query• k result points k point pairs• active page list list of active page pairs• initialization root pair (rootR, rootS)
• distance point/query distance of point pair• mindist page/query mindist betw. page
• Two strategies for tie breaks (same distance):- Depth-first- Breadth first
• Three policies for tree traversal- Basic (one tree determines priority)- Even (priority to node with shallower depth)- Simultaneous (all possible pairs are candidates for
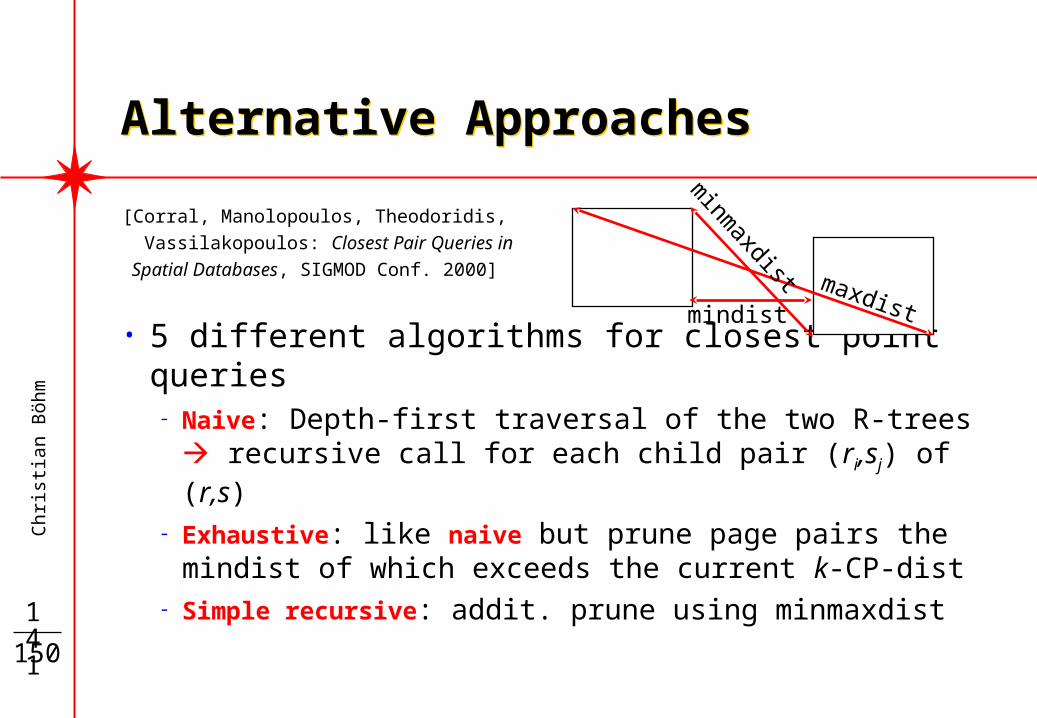
• 5 different algorithms for closest point queries- Naive: Depth-first traversal of the two R-trees
recursive call for each child pair (ri,sj) of (r,s)
- Exhaustive: like naive but prune page pairs the mindist of which exceeds the current k-CP-dist
- Simple recursive: addit. prune using minmaxdist
maxdistm
inmaxdist
mindist
Chr
isti
an B
öhm
142150
Alternative ApproachesAlternative Approaches
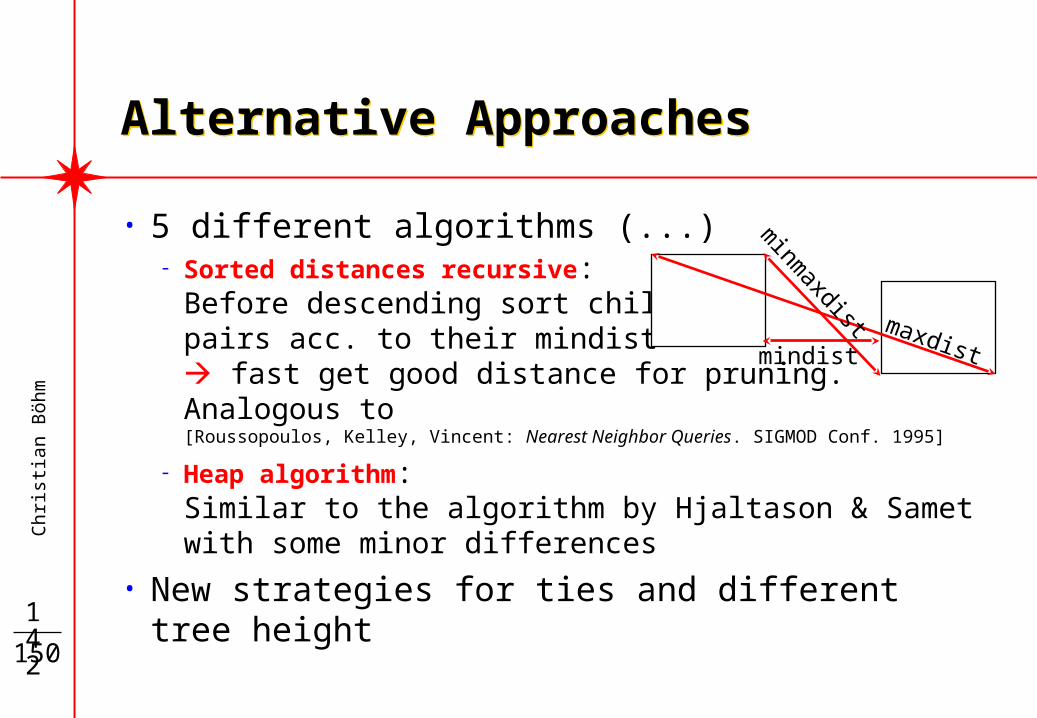
• 5 different algorithms (...)- Sorted distances recursive:
Before descending sort childpairs acc. to their mindist fast get good distance for pruning. Analogous to[Roussopoulos, Kelley, Vincent: Nearest Neighbor Queries. SIGMOD Conf. 1995]
- Heap algorithm:Similar to the algorithm by Hjaltason & Sametwith some minor differences
• New strategies for ties and different tree height
maxdist
minm
axdist
mindist
Chr
isti
an B
öhm
143150
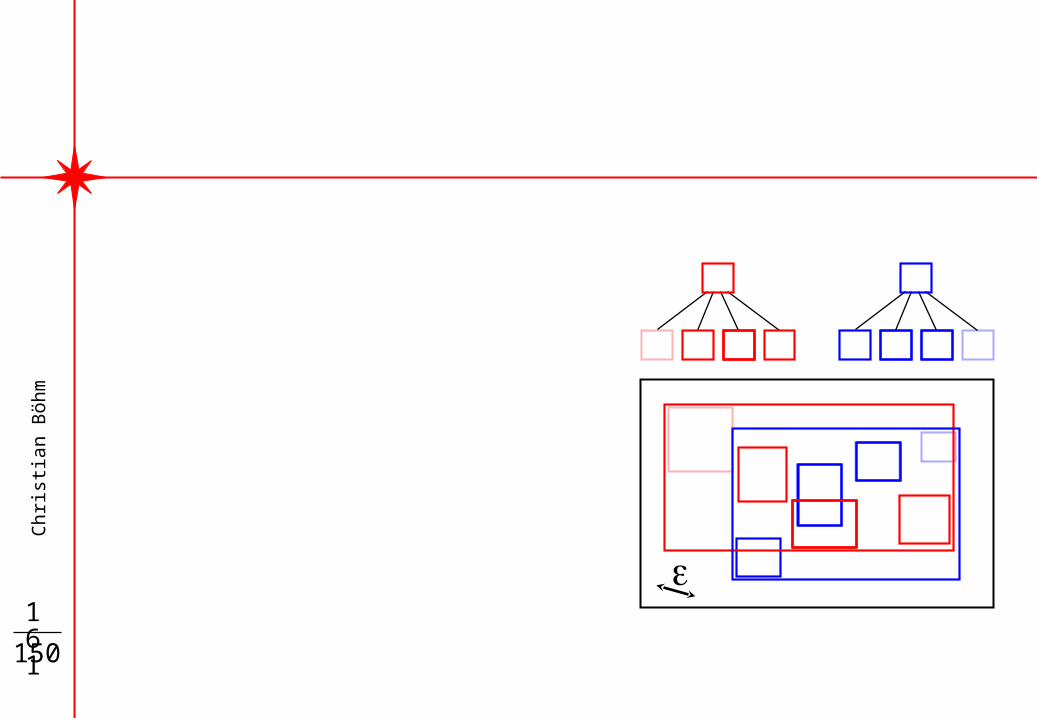
Modeling and OptimizationModeling and Optimization
[Böhm, Kriegel: A Cost Model and Index Architecture for the Similarity Join, Wednesday, 1630]
Mating probability of index pages: Probability that distance between two pages Two-fold application of Minkowski sum
Chr
isti
an B
öhm
144150
Modeling and OptimizationModeling and Optimization
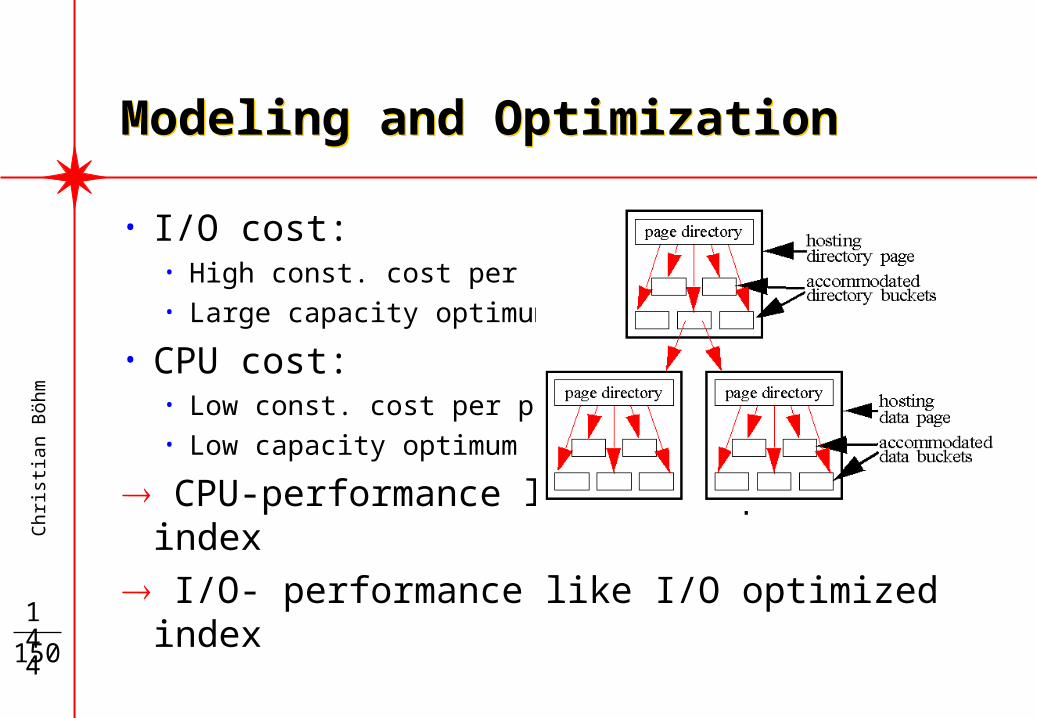
• I/O cost:• High const. cost per page• Large capacity optimum
• CPU cost:• Low const. cost per page• Low capacity optimum
CPU-performance like CPU optimized index
I/O- performance like I/O optimized index
Chr
isti
an B
öhm
145150
Plane Sweep OptimizationPlane Sweep Optimization
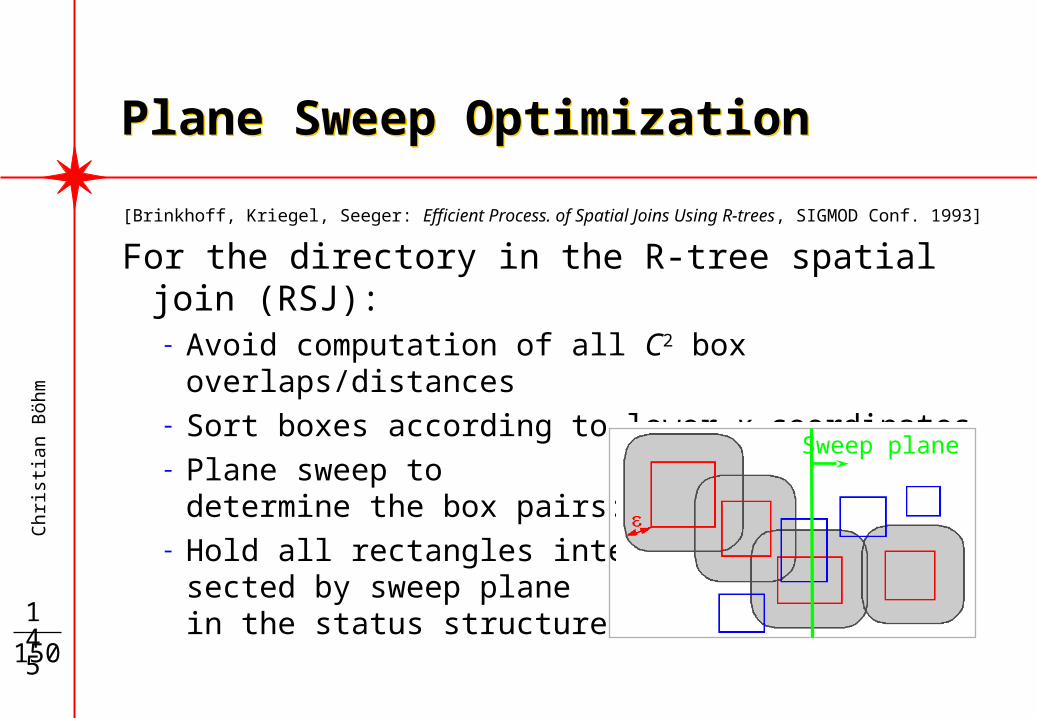
[Brinkhoff, Kriegel, Seeger: Efficient Process. of Spatial Joins Using R-trees, SIGMOD Conf. 1993]
For the directory in the R-tree spatial join (RSJ):- Avoid computation of all C2 box overlaps/distances- Sort boxes according to lower x-coordinates- Plane sweep to
determine the box pairs:- Hold all rectangles inter-
• A plane sweep algorithm for the spatial join- Partition space into k stripes
at most 2N/k objects start/end in each stripe- Rectangle contained in a single strip is called small- Other rectangles decomposed: start, end, centerpiece- Recursive determination of intersections for start-
and endpieces and small rectangles
• Optimum complexity O(n log n + |R S|)
Chr
isti
an B
öhm
147150
Plane Sweep OptimizationPlane Sweep Optimization
[Böhm, Krebs, Kriegel: Optimal Dimension Sweeping: A Generic Technique, submitted for pub.]
• Reduction of the computational cost of point-distances• Most important cost factor for all similairty join algorithms
• Plane-sweep or also sort-merge method:• Sort points on both pages according to a selected dimension• Many point pairs can be excluded beforehand
• Crucial: Dimension• Distance or overlap• Extent of the pages• Probability model
Chr
isti
an B
öhm
148150
55ConclusionsConclusions
Chr
isti
an B
öhm
149150
SummarySummary
• Similarity join is a powerful database primitive• Supports many new applications of
- Data mining- Data analysis
• Considerable performance improvements
Chr
isti
an B
öhm
150150
SummarySummary
• Many different algorithms for the similarity join- Most for the distance range join ( join)- Some approaches for closest pair queries
- Important operation of nearest neighbor join has almost not been considered yet
• All 3 types of join have different applications• Comparison of different join algorithms:
- Mostly a competition for speed
Chr
isti
an B
öhm
151150
SummarySummary
• Only few other advantages/disadvantages:- Scalability:
• MSJ and -kdB-tree have high main memory requirements in high-dimensional spaces
- Existence of an index:• Actually no matter because R-trees can be fast
constructed bottom-up. Construction time often much less than join time
• Even if preconstructed indexes exist:Approaches based on sorting often better
- No good criteria known for algorithm selection
Chr
isti
an B
öhm
152150
Future Research DirectionsFuture Research Directions
• Applications:- Many standard data mining methods accelerable:
• Outlier detection• Various clustering algorithms (e.g. obstacle clustering)• Hough transformation and similar analysis methods• ...
- New data mining methods will become feasable:• Subspace clustering & correlation detection• Methods may become interactive• ...
Chr
isti
an B
öhm
153150
Future Research DirectionsFuture Research Directions
• Algorithms- Sufficient research for join and closest pair query- Almost no convincing approaches for the k-NN-join
Important database primitive for many applications- Parallel Algorithms- Non-vector metric data (e.g. text mining)- Approximative join algorithms
• Similarity search: Approximative search often sufficient• Join performance could be considerably improved
- ...
Chr
isti
an B
öhm
154150
Future Research DirectionsFuture Research Directions
• Optimization of various critical parameters- Dimension- Replication - Index scan strategies- ...
Chr
isti
an B
öhm
155150
??QuestionsQuestions
Chr
isti
an B
öhm
156150
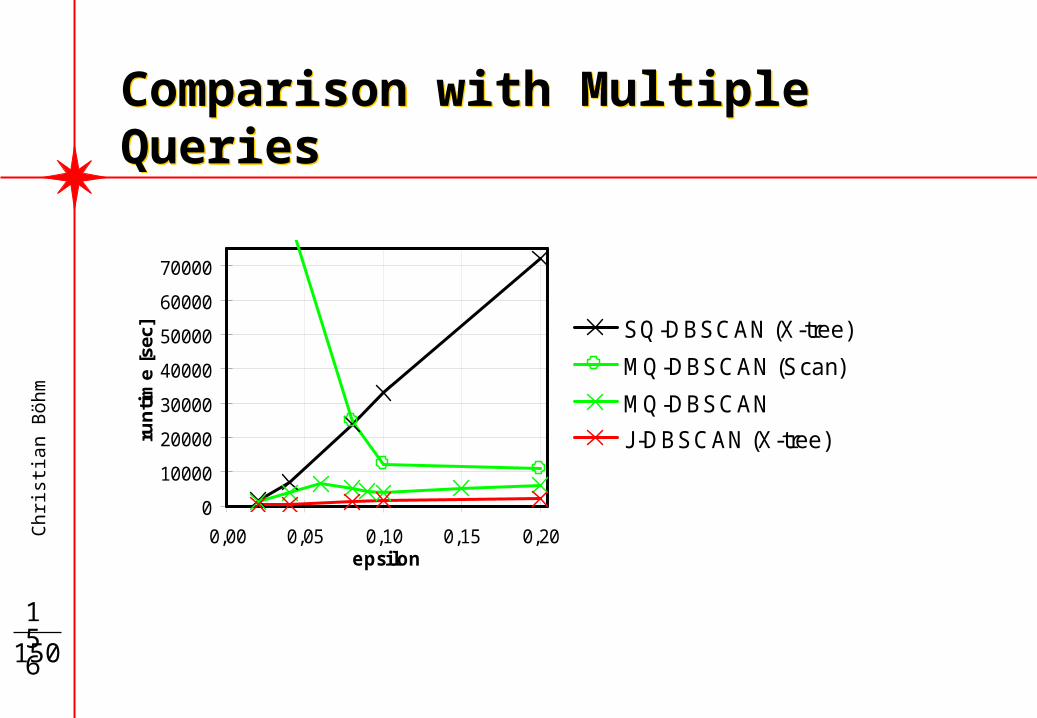
Comparison with Multiple QueriesComparison with Multiple Queries
Weitere KDD-Algorithmen auf Join abstützen Z.B. Outlier Detection Subspace Clustering, Ermittlung von Korrelationen Interaktivität
Neue Algorithmen für den Similarity Join Nutzung des Optimierungspotentials (Dimension,...) Parallelisierung Approximative Join-Bearbeitung „k-nearest-neighbor Joins“ und „k-best-pair Joins“
Chr
isti
an B
öhm
161150
Chr
isti
an B
öhm
162150
Chr
isti
an B
öhm
163150
KDD Algorithms Based on Similarity QueriesKDD Algorithms Based on Similarity Queries
DBSCAN
OPTICS
....
LOF
Dist.Based
Outliers
....
Simultan.Nearest
NeighborClassific.
....
SpatialTrend
Detect.
SpatialAssoc.Rules
Chr
isti
an B
öhm
164150
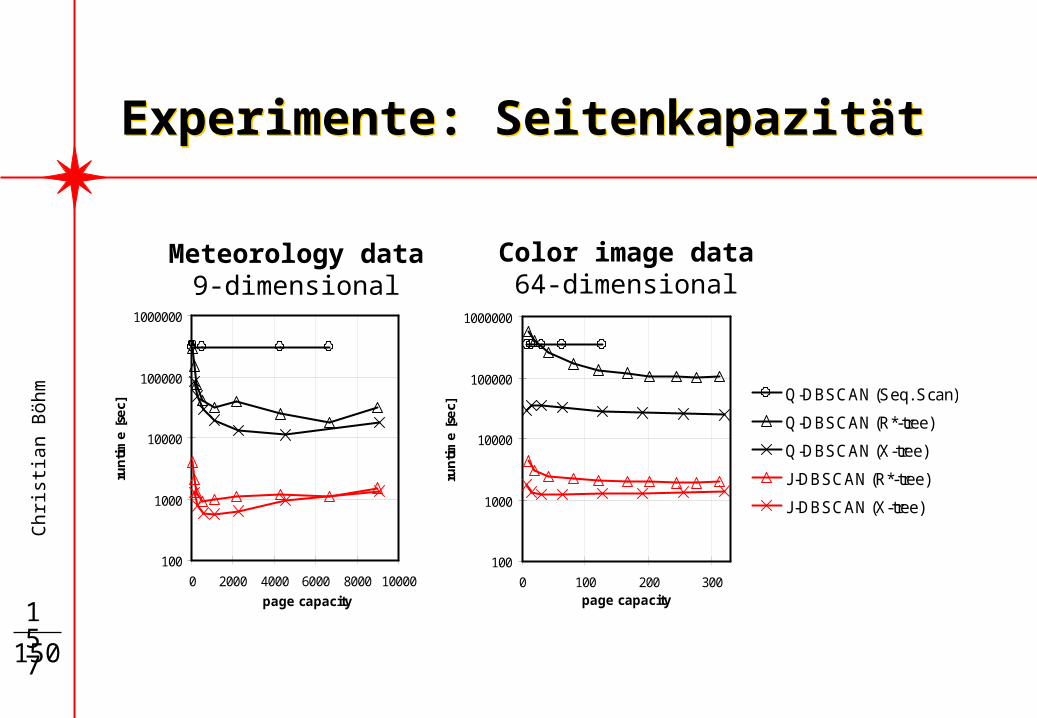
Curse of DimensionalityCurse of Dimensionality
Cost model opens optimization potential Optimization of the page capacity (# points)
Optimized index compression[Berchtold, Böhm, Jagadish, Kriegel, Sander: Independent Quantization: An Index Compression Technique for High-Dimensional Spaces, ICDE 2000]
Optimized dimension assignment[Berchtold, Böhm, Keim, Kriegel, Xu: Optimal Multidimensional Query Processing Using Tree Striping, DaWaK 2000]