Page 1
Sequential filtering for the shallow water equations model 1
Comparison of Ensemble Data Assimilation methods for the
shallow water equations model in the presence of nonlinear
observation operator
M. Jardak,a ∗I. M. Navon b and M. Zupanski c
a Laboratoire de Metorologie Dynamique/CNRS Ecole Normale Superieure, Paris, France
b Department of Scientific Computing, Florida State University, Tallahassee, FL 32306-4120, USA
c Cooperative Institute for Research in the Atmosphere, Colorado State University, 1375 Campus Deliver, Fort Collins,
CO 80523-1375, USA
∗Correspondence to: M.Jardak, Laboratoire de Metorologie Dynamique/CNRS Ecole Normale Superieure, Paris, France,
E-mail:[email protected]
A new comparison of three frequently used sequential data assimilation
methods illuminating their strengths and weaknesses in the presence of linear
and nonlinear observation operators is presented. The ensemble Kalman filter
(EnKF), the particle filter (PF) and the maximum likelihood ensemble filter
(MLEF) methods were implemented and the spectral shallow water equations
model in spherical geometry model was employed using the Rossby-Haurwitz
Wave no. 4 test case as initial condition. Numerical tests conducted reveal that
all three methods perform satisfactory in the presence of linear observation
operator for 10 to 15 days model integration, whereas the EnKF, even with the
Evensen fixture [Evensen 03] for the nonlinear observation operator failed in all
tested metrics. The particle filter and the hybrid filter MLEF both performed
satisfactorily in the presence of highly nonlinear observation operators with a
slight advantage in terms of CPU time to the MLEF method. Copyright c© 2010
Royal Meteorological Society
Key Words: Data Assimilation, EnKF, PF, MLEF, shallow water equations
Received . . .
Citation: . . .Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 2
Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
1. Introduction
Sequential data assimilation fuses observations of the
current (and possibly, past) state of a system with
predictions from a mathematical model (the forecast) to
produce an analysis, providing ”the best” estimate of the
current state of the system. Central to the concept of
sequential estimation data assimilation is the propagation
of flow dependent probability density function (pdf) given
an estimate of the initial pdf.
In sequential estimation, the analysis and forecasts
can be viewed as probability distributions. The analysis
step is an application of the Bayes theorem. Advancing
the probability distribution in time, for the general case is
done by the Chapman-Kolmogorov equation, but since it is
unrealistically expensive, various approximations operating
on representations of the probability distributions are
used instead. If the probability distributions are normal,
they can be represented by their mean and covariance,
which gives rise to the Kalman filter (KF). However,
due to the high computational and storage overheads
it requires, an approximation based on Monte-Carlo
ensemble calculations has been proposed by [Evensen
1994], [Evensen and Van Leeuwen 1996], [Burgers et al.
1998] and [Houtekamer and Mitchell 1998]. The method
is essentially a Monte-Carlo approximation of the Kalman
filter which avoids evolving the covariance matrix of the
state vector. A second type of EnKF filter consists of the
class of square root filters of [Anderson and Anderson 2003]
see also [Bishop et al. 2001].
Variants of the EnKF such as Kalman ensemble square
root filters (KSRF), the singular evolutive extended Kalman
(SEEK) filter, and the less common singular evolutive
interpolated Kalman (SEIK) filter can be found in the paper
of [Tippett et al. 2003], see also the paper of [Nerger et al.
2005] where the aforementioned filters were reviewed and
compared.
The PF methods,also known as sequential Monte-
Carlo (SMC) methods or Bayesian filters. The SMC
methods are an efficient means for tracking and forecasting
dynamical systems subject to both process and observation
noise. Applications include robot tracking, video or audio
analysis, and general time series analysis see [Doucet et
al. 2001]. These methods utilize a large number N of
random samples named particles to represent the posterior
probability distributions. The particles are propagated
over time using a combination of sequential importance
sampling and resampling steps. Resampling for PF is used
to avoid the problem of degeneracy of this algorithm that is,
avoiding the situation where all but one of the importance
weights are close to zero. The performance of the PF
algorithm can be crucially affected by a judicious choice
of a resampling method. See [Arulampalam et al. 2002]
for a listing of the most used resampling algorithms. The
PF suffers from ”the curse of dimensionality” requiring
computations that increase exponentially with dimension
as pointed out by Silverman [Silverman 1986]. This
argument was enhanced and amplified by the recent work of
[Bengtsson et al. 2008] and [Bickel et al. 2008] and finally
explicitly quantified by [Synder et al. 2008]. They indicated
that unless the ensemble size is greater than exp(τ2/2),
where τ2 is the variance of the observation log-likelihood,
the PF update suffers from a ”collapse” in which with
high probability only few members are assigned a posterior
weight close to one while all other members have vanishing
small weights. This issue becomes more acute as we move
to higher spatial dimensions.
The MLEF filter of [Zupanski 2005]; [Zupanski and
Zupanski 2006] is a hybrid between the 3-D variational
method and the EnKF. It maximizes the likelihood of
a posterior probability distribution, thus its name. The
MLEF belongs to the class of deterministic ensemble
filters, since no perturbed observations are employed. As
in variational and ensemble data assimilation methods, the
cost function is derived using Gaussian probability density
function framework. Like other ensemble data assimilation
algorithms, the MLEF produces an estimate of the analysis
uncertainty ( e.g. analysis error covariance)
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 3
Sequential filtering for the shallow water equations model 3
In this paper data assimilation experiments are
performed and compared using the ensemble Kalman filter
EnKF, the particle filter PF and the Maximum Likelihood
Ensemble Filter MLEF. These methods were tested on a
spectral shallow water equations model using the Rossby-
Haurwitz wave no 4 test case for both linear and nonlinear
observation operators.
The spectral shallow water equations model in
spherical geometry of Williamson [Williamson 1992] and
[Jakob et al.1995] is used to generate the true solution
and forecasts. To improve EnKF analysis errors and
avoid ensemble errors that generate spurious corrections,
a covariance localization investigated by [Houtekamer and
Mitchell 1998,2001] is incorporated. To improve both the
analysis and the forecast results, the forecast ensemble
solutions are inflated from the mean as suggested in
[Anderson and Anderson 1999] and reported in [Hamill et
al. 2001].
Since the resampling is a crucial step for (PF) method,
the systematic, multinomial and the residual resampling
methods [Arulampalam et al. 2002],[Doucet et al. 2001] and
[Nakano and al. 2007] were tested.
The paper is structured as follows. Section 2
presents the spectral shallow-water equations in spherical
coordinates model and the numerical methods used for its
resolution. In section 3 we present algorithmic details of
each of the data assimilation methods considered. In section
4 we present the numerical results obtained and discuss
them for both the linear and nonlinear observation operators
in several commonly used error metrics. In particular the
Talagrand diagrams ( skill or score test) see [Wilks 2005]
, the early work of Murphy [ Murphy 1971 and 1993] and
[Talagrand et al. 1997 ] and the interpretation of [Hamill
2001], and the root mean square error (rmse) are employed
to detect ensemble members spread, while the rmses are
used to track filter divergence [Houtekamer 2005]
Finally section 5 is reserved for summary and
conclusions.
2. Shallow-Water equations in spherical geometry
The shallow water equations are a set of hyperbolic
partial differential equations that describe the flow below
a pressure surface in a fluid.
The equations are derived from depth-integrating the
Navier-Stokes equations, they rely primarily on the
assumptions of constant density and hydrostatic balance.
The shallow-water equations in spherical geometry are
given by
∂u
∂t+
u
a cos θ
∂u
∂λ+v
a
∂u
∂θ− tan θ
avu− fv = − g
a cos θ
∂h
∂λ
∂v
∂t+
u
a cos θ
∂v
∂λ+v
a
∂v
∂θ+
tan θ
au2 + fu = −g
a
∂h
∂θ
∂h
∂t+
u
a cos θ
∂h
∂λ+v
a
∂h
∂θ+
h
a cos θ
[∂u
∂λ+∂(cos θ)
∂θ
]= 0
where V = u~i+ v~j is the horizontal velocity vector
( with respect to the surface of the sphere), gh is the free
surface geopotential, h is the free surface height, g is the
gravity acceleration. f = 2Ω sin θ is the Coriolis parameter,
Ω is the angular velocity of the earth. θ denotes the angle of
latitude, µ = sin θ is the longitude. λ the longitude,and a is
the radius of the earth.
One of the major advances in meteorology was the use
by [Rossby 1939] of the barotropic vorticity equation with
the β -plane approximation to the spherical of the Earth, and
the deduction of solutions reminiscent of some large scale
waves in the atmosphere. These solutions have become
known as Rossby waves see [Haurwitz 1940 ] While the
shallow water do not have corresponding analytic solutions
they are expected to evolve in a similar way as the above R-
H equations which explains why they have been widely used
to test shallow water numerical models since the seminal
paper of [Phillips 1959]. Following the research work of
[Hoskins 1973] Rossby -Haurwitz waves with zonal wave
numbers less or equal to 5 are believed to be stable. This
makes the R-H zonal wave no 4 a suitable candidate for
assessing accuracy of numerical schemes as was evident
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 4
4 M.Jardak et al.
from its being chosen as a test case by [Williamson et al.
1992] and by a multitude of other authors. It has been
numerically shown that the R-H wave no 4 breaks down
into more turbulent behavior after long term numerical
integration as recently discovered by [Thuburn and Li 2000]
and also by [Smith and Dritschel 2006].
The initial velocity field for the Rossby-Haurwitz wave
is defined as
u = aω cosφ+ aK cosr−1 φ(r sin2 φ− cos2 φ)
cos(rλ)
v = −aKr cosr−1 φ sinφ sin(rλ)
(1)
The initial height field is defined as,
h = h0 +a2
g[A(φ) +B(φ) cos(rλ) + C(φ) cos(2rλ)]
(2)
where the variables A(φ), B(φ), C(φ) are given by
A(φ) =ω
2(2Ω + ω) cos2 φ+
1
4k2
cos2r φ[(r + 1) cos2 φ+ (2r2 − 2r − 2)− 2r2 cos2 φ]
B(φ) =2(Ω + ω)k
(r + 1)(r + 2)
cosr φ[(r2 + 2r + 2)− (r + 1)2 cos2 φ]
C(φ) =1
4k2 cos2r φ[(r + 1) cos2 φ− (r + 2)]
In here, r represents the wave number,h0 is the height at the
poles. The strength of the underlying zonal wind from west
to east is given by ω and k controls the amplitude of the
wave.
3. Sequential Bayesian Filter- theoretical setting
This section applies to the three sequential data assimilation
methods discussed herein. One also can see the survey of
Diard [Diard et al. 2003] and the overview of [Clappe et al.
2007]. The sequential Bayesian filter is a large numberN of
random samples advanced in time by a stochastic evolution
equation, to approximate the probability densities. In order
to analyze and make inference about the dynamic system at
least a model equation along with an observation operator
are required. Generically, stochastic filtering problem is a
dynamic system that assumes the form
xt = f(t,xt−1,vt)
yt = h(t,xt,nt)
(3)
The first equation of (3) is the state equation or the system
model, the second represents the observation equation.
The vectors xt and yt are respectively the state and the
observation vectors. The state and observation noises are
represented by vt and nt respectively. The discrete-time
counterpart of the system (3) reads
xk = f(xk−1,vk−1)
yk = h(xk,nk)
(4)
The deterministic mapping fk : Rnx × Rnd −→ Rnx is a
possibly non-linear function of the state xk−1, vk, k ∈ N
is an independent identically distributed (i.i.d) process noise
sequence, nx, nd are dimensions of the state and the process
noise vectors, respectively. Likewise, the deterministic
mapping hk : Rnx × Rnn −→ Rnz is a possibly non-
linear function, nk, k ∈ N is an i.i.d. observation noise
sequence, and nx, nn are dimensions of the state and
observation noise vectors, respectively.
Let y1:k denote the set of all available observations
yi up to time t = k, (i.e. y1:k = yi|i = 1, · · · , k). From
a Bayesian point of view, the problem is to recursively
calculate some degree of belief in the state xk at time
t = k, taking different values, given the data y1:k up to
the time t = k. Equivalently, the Bayesian solution would
be to calculate the pdf p(xk|y1:k). This density will
encapsulate all the information about the state vector xk
that is contained in the observations y1:k and the prior
distribution for xk.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 5
Sequential filtering for the shallow water equations model 5
Assume the required pdf p(xk−1|y1:k−1) at time k − 1 is
available. The prediction stage uses the state equation (4) to
obtain the prior pdf of the state variable at time k via the
Chapman-Kolmogorov equation
p(xk|y1:k−1) =
∫p(xk|xk−1)p(xk−1|y1:k−1)dxk−1,
(5)
where the probabilistic model of the state evolution,
p(xk|xk−1) is readily obtained from the state equation (4)
and the known statistics of vk−1.
As an observation yk becomes available at time t = k,
the prior pdf could be updated via the Bayes rule
p(xk|y1:k) =p(zk|xk)p(xk|y1:k−1)
p(yk|y1:k−1), (6)
where the normalizing constant
p(yk|y1:k−1) =
∫p(yk|xk)p(xk|y1:k−1)dxk. (7)
depends on the likelihood function p(yk|xk), defined by
the measurement or observation equation (4) and the known
statistics of nk.
The relations (5) and (6) form the basis for the
optimal Bayesian solution. This recursive propagation of the
posterior density is only a conceptual solution. One cannot
generally obtain an analytical solution. Solutions exist only
in a very restrictive set of cases like that of the Kalman
filters for instance (namely, if fk and hk are linear and both
vk and nk are Gaussian). We turn now to describe in detail
each of the three used filters.
3.1. Particle Filters
Particle filters see [Doucet et al. 2000, Doucet et al. 2001,
Arulampalam et al. 2002 , Berliner and Wikle 2007A]
and recently the review paper of [Van Leeuwen 2009]
approximate the posterior densities by population of states.
These states are called ”particles”. Each of the particles
has an assigned weight, and the posterior distribution can
then be approximated by a discrete distribution which has
support on each of the particles. The probability assigned to
each particle is proportional to its weight. See for instance
[Metropolis and Ulam 1944], [Gordon et al., 1993] [Doucet
et al. 2001] and [Stuart 2010].
The different (PF) algorithms differ in the way that the
population of particles evolves and assimilates the incoming
observations. A major drawback of particle filters is that
they suffer from sample degeneracy after a few filtering
steps.
In this 2-D plus time problem the common remedy
is to resample the prior pdf whenever the weights focus
on few members of the ensemble. Here we use several
strategies such as Systematic Resampling (SR), Residual
Resampling (RR) and or the Bayesian bootstrap filter of
Gordon et al. [Gordon 1993] see also [Berliner and Wikle
2007A and 2007B]. Multinomial Resampling (MR). The
SR algorithm generates a population of equally weighted
particles to approximate the posterior at some time k. This
population of particles is assumed to be an approximate
sample from the true posterior at that time instant.
The PF algorithm proceeds as follows:
• Initialization: The filter is initialized by drawing a
sample of size N from the prior pdf.
• Filtering:
Preliminaries: Assume that xik−1i=1,··· ,N is a
population of N particles, approximately distributed
as in an independent sample from p(xk−1|y1:k−1)
Prediction: Sample N values, q1k, · · · , qNk ,
from the distribution of vk. Use these to
generate a new population of particles,
x1k|k−1,x
2k|k−1, · · · ,x
Nk|k−1 via the equation
xik|k−1 = fk(xik−1,vik) (8)
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 6
6 M.Jardak et al.
Filtering: Assign each xik|k−1, a weight qik. This
weight is calculated by
qik =p(yk|xik|k−1)∑Nj=1 p(yk|x
jk|k−1)
(9)
This defines a discrete distribution which, for
i ∈ 1, 2, · · · , N, assigns probability mass qik to
element xik|k−1
• Resampling: Resample independently N times, with
replacement, from the distribution obtained in the
filtering stage. The resulting particles, xiki=1,··· ,N ,
form an approximate sample from p(xk|y1:k) .
The method outlined above can be justified as follows.
If the particles at time t = k − 1 were an i.i.d sample
from the posterior at time t = k − 1, then the predictive
stage just produces an i.i.d. sample from the prior at time
t = k. The filtering stage can be viewed as an importance
sampling approach to generate an empirical distribution
which approximates the posterior.
The proposal density is just the prior p(xk|y1:k−1),
and as a result of Bayes formula, we obtain
p(xk|y1:k−1,yk) ∝ p(xk|y1:k−1)p(yk|xk), (10)
the weights are proportional to the likelihood p(yk|xk).
As N tends to infinity, the discrete distribution which
has probability mass qi at point xik|k−1, converges weakly
to the true posterior. The resampling step is crucial to
particle filters. It is used to generate equally weighted
particles aimed at avoiding the problem of degeneracy of
the algorithm, that is, avoiding the situation that all but
one of the weights are close to zero. The resampling step
modifies the weighted approximate density p(xk|yk) to
an unweighted density p(xk|yk) by eliminating particles
having low importance weights and by multiplying particles
having highly importance weights. Formally:
p(xk|yk) =
N∑i=1
qiδ(xk − xki) (11)
is replaced by
p(xk|yk) =
N∑i=1
1
Nδ(xk − xk
?) =
N∑i=1
niNδ(xk − xk
i)
(12)
where ni is the number of copies of particle xki in the
new set of particles xk?. For extensive review of particle
filtering see[Van Leeuwen 09].
3.2. The Ensemble Kalman Filter
The ensemble Kalman filter (EnKF) was first proposed by
Evensen [Evensen 1994] and further developed by [Burgers
et al. 1998] and [Evensen 2003, Evensen 2007]. For the
current status and the potential of the EnKF we refer to
[Kalnay 2009]. It is related to particle filters in the context
that a particle is identical to an ensemble member. EnKF
is a sequential filter method, which means that the model
is integrated forward in time and, whenever observations
are available, these are used to reinitialize the model
before the integration continues. The EnKF originated as a
version of the Extended Kalman Filter (EKF) of Jazwinski
[Jazwinski 1970] and Bucy[Bucy 1965] for large problems.
The classical KF [Kalman 60] method is optimal in the
sense of minimizing the variance only for linear systems
and Gaussian statistics.
Similar to the particle filter method, the EnKF stems
from a Monte Carlo integration of the Fokker-Planck
equation governing the evolution of the pdf that describes
the prior, forecast, and error statistics. In the analysis step,
each ensemble member is updated according to the KF
scheme and replaces the covariance matrix by the sample
covariance computed from the ensemble. However, the
EnKF presents two potential problems namely:
1) Even though the EnKF uses full non-linear dynamics to
propagate the forecast error statistics, the EnKF assumes
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 7
Sequential filtering for the shallow water equations model 7
that all probability distributions involved are Gaussian.
2) The updated ensemble preserves only the first two
moments of the posterior.
Let p(x) denote the Gaussian prior probability density
distribution of the state vector x with mean µ and covariance
Q
p(x) ∝ exp(−1
2(x− µ)TQ−1(x− µ)
)We assume the data y to have a Gaussian pdf with
covariance R and mean Hx, where H is the so-called the
observation matrix, is related to h of equation (4), and where
the value Hx assumes what the value of the data y would
be in absence of observation errors. Then p(y|x) is the
probability (likelihood) of the observations y given that the
truth is given by the model state x and is of the form
p(y|x) ∝ exp
(−1
2(y −Hx)TR−1(y −Hx)
).
According to the Bayes theorem the posterior probability
density follows from the relation
p(x|y) ∝ p(y|x)p(x). (13)
There are many variants of implementing the EnKF
of various computational efficiency and in what follows
we employ standard formulation of the EnKF for linear
and nonlinear observation operators with covariance
localization. See [Evensen 1994, Burgers et al. 1998,
Mandel 2006, Mandel 2007 and Lewis et al. 2006], also see
[Nerger et al. 2005] and Sakov and Oke [Sakov 2008] The
implementation of the standard EnKF may be divided into
three steps, as follows:
• Setting and matching
Define the ensemble
X = [x1, · · · ,xN ] (14)
be an nx ×N matrix whose columns are a sample
from the prior distribution. N being the number of
the ensemble members.
Form the ensemble mean
X = X · 1N , (15)
where 1N ∈ RN×N is the matrix where each element
is equal to 1.
Define the ensemble perturbation matrixX ′ and set
the Rnx×nx ensemble covariance matrix C
X ′ = X − 1
NX , (16)
C =X ′X ′T
N − 1, (17)
• Sampling
Generate
Y = [y1, · · · ,yN ] (18)
be an ny ×N matrix whose columns are a replica of
the measurement vector y plus a random vector from
the normal distribution N (0,R).
Form the Rny×ny measurement error covariance
R =YYt
N − 1, (19)
• Updating Obtain the posterior X p by the linear
combinations of members of the prior ensemble
X p = X + CHT (HCHT +R)−1(Y −HX ). (20)
The matrix
K = CHT (HCHT +R)−1 (21)
is the Kalman gain matrix. Since R is always positive
definite( i.e. covariance matrix), the inverse (HCHT +
R)−1 exists.
An easy computation shows that the mean and covariance
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 8
8 M.Jardak et al.
of the posterior or updated ensemble are given by
X p = X p +K [y − (HX p + d)] , (22)
with the vector d results from the affine measurement
relation
h(x) = Hx + d. (23)
The covariance of the posterior obeys
Cp = C − K[HCHT +R
]KT , (24)
In the case of nonlinear observation operators, a
modification to the above algorithm is advised. As advised
by Evensen [Evensen 2003] and following his notation, let
x the augmented state vector made of the state vector and
the predicted observation vector (nonlinear in this case).
x =
x
H(x)
. (25)
Define the linear observation operator H by
H
x
y
= y (26)
and carry out the steps of the EnKF formulation in
augmented state space x and H instead of x and H.
Superficially, this technique appears to reduce the nonlinear
problem to the previous linear observation operator case.
However, whilst the augmented problem, involving linear
observation problem, is a reasonable way of formulating the
EnKF, it is not as well-founded as the linear case, which can
be justified as an approximation to the exact and optimal KF.
To prevent the occurrence of filter divergence usually
due to the background-error covariance estimates from
small number of ensemble members as pointed out in
[Houtekamer and Mitchell 1998], the use of covariance
localization was suggested. Mathematically, the covariance
localization increases the effective rank of the background
error covariances. See the work of [ Gaspari and
Cohn 1999] also [Hamill and Snyder 2000, 2006] and
[Ehrendorfer 2007]. The covariance localization consists of
multiplying point by point the covariance estimate from
the ensemble with a correlation function that is 1.0 at
the observation location and zero beyond some prescribed
distance. Mathematically, to apply covariance localization,
the Kalman gain
K = CHT (HCHT +R)−1
is replaced by a modified gain
K = [ρ C]HT (H [ρ C]HT +R)−1 (27)
where ρ denotes the Schur product ( The Schur product
of matrices A and B is a matrix D of the same dimension,
where dij = aijbij) of a matrix S with local support with
the covariance model generated by the ensemble. Various
correlation matrices have been used. For the present model,
we used the usual Gaussian correlation function
ρ(D) = exp[−[D
l]2], (28)
where l is the correlation length here l = 200 length units.
In addition, the additive covariance inflation of [Anderson
and Anderson 1999] with the inflation factor r = 1.001 has
been employed.
3.3. The Maximum Likelihood Ensemble Filter
The Maximum Likelihood Ensemble Filter (MLEF)
proposed by Zupanski [Zupanski 2005], and Zupanski and
Zupanski [Zupanski 2006] is a hybrid filter combining
the 3-D variational method with the EnKF. It maximizes
the likelihood of posterior probability distribution which
justifies its name. The method comprises three steps, a
forecast step that is concerned with the evolution of the
forecast error covariances, an analysis step based on solving
a non-linear cost function and an updating step.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 9
Sequential filtering for the shallow water equations model 9
• Forecasting:
It consists of evolving the square root analysis
error covariance matrix through the ensembles. The
starting point is from the evolution equation of
the discrete Kalman filter described in Jazwinski
[Jazwinski 1970]
P kf =Mk−1,kPkaMT
k−1,k +Qk−1, (29)
where P (k)f is the forecast error covariance matrix at
time k,Mk−1,k is the linearized forecast model (e.g.,
Jacobian) from time k − 1 to time k, and Qk−1 is the
model error matrix which is assumed to be normally
distributed. Since P k−1a is positive matrix for any k,
equation (29) could be factorized and written as
P kf =
(Pkf )1/2︷ ︸︸ ︷(
Mk−1,k(P ka )1/2)(Mk−1,k(P ka )1/2
)T+Qk−1
where (P ka )1/2 is of the form
(P ka )1/2 =
pk(1,1) p
k(2,1) · · · p
k(N,1)
pk(1,2) pk(2,2) · · · p
k(N,2)
pk(1,n) pk(2,n) · · · p
k(N,n)
, (30)
as usual N is the number of ensemble members and
n the number of state variables. The lower case pki,j
are obtained by calculating the square root of (P ka ).
Using equation(30), the square root forecast error
covariance matrix (P kf )1/2 can then be expressed as
(P kf )1/2 =
bk(1,1) b
k(2,1) · · · b
k(N,1)
bk(1,2) bk(2,2) · · · b
k(N,2)
bk(1,n) bk(2,n) · · · b
k(N,n)
, (31)
where for each 1 ≤ i ≤ N
bki =
bk(i,1)
bk(i,2)
...
bk(i,n)
=Mk−1,k
xk1 + pk(i,1)
xk2 + pk(i,2)
...
xkn + pk(i,n)
−
Mk−1,k
xk1
xk2...
xkn
.
The vector xk =(xk1x
k2 · · ·xkn
)Tis the analysis state
from the previous assimilation cycle. which is found
from the posterior analysis pdf as presented in
[Lorenc 1986].
• Analyzing:
The analysis step for the MLEF involves solving
a non-linear minimization problem. As in Lorenc
[Lorenc 1986], the associated cost function is defined
in terms of the forecast error covariance matrix and is
given as
J (x) = 12 (x− xb)
T(P kf
)−1
(x− xb)+
12 [y − h(x)]
T R−1 [y − h(x)]
(32)
where y is the vector of observations, h is the non-
linear observation operator, R is the observational
error covariance matrix and xb is a background state
given by
xb =Mk−1,k(xk) +Qk−1. (33)
Through a Hessian preconditioner we introduce the
change of variable
(x− xb) = (P kf )1/2(I +O)−T/2ξ (34)
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 10
10 M.Jardak et al.
where ξ is vector of control variables, O is referred
to as the observation information matrix and I is the
identity matrix. The matrix O is provided by
O = (P kf )T/2HTR−1H(P kf )T/2 =
(R−1/2H(P kf )1/2)T (R−1/2H(P kf )1/2)
here H is the Jacobian matrix of the non-linear
observation operator h evaluated at the background
state xb.
Let Z the matrix defined by
Z =
z(1,1) z(2,1) · · · z(N,1)
z(1,2) z(2,2) · · · z(N,2)
z(1,n) z(2,n) · · · z(N,n)
,
and let zi assumes the form
zi =
z(i,1)
z(i,2)
...
z(i,n)
= R−1/2Hbki .
From the following approximations
zi ≈ R−1/2[h(x + bki )− h(x)
], (35)
and
O ≈ ZZT . (36)
one can use an eigenvalue decomposition of the
of symmetric positive definite matrix I +O to
calculate the inverse square root matrix necessary to
the updating step. It is worth mentioning that the
approximation (35) is not necessary and a derivation
of the MLEF not involving (35) has been recently
developed in Zupanski et al. [Zupanski 08]
• Updating:
The final point about MLEF is to update the square
root analysis error covariance matrix. In order to
estimate the analysis error covariance at the optimal
point, the optimal state xopt minimizing the cost
function J given by (32)is substituted
(P ka )T/2 = (P kf )T/2(I +O(xopt))−T/2. (37)
4. Numerical results
4.1. Model set-up
As in [Williamson 1992,1997,2007] and [Jakob et al. 1995],
the grid representation for any arbitrary variable φ is related
to the following spectral decomposition
φ(λ, µ) =
M∑m=−M
N(m)∑n=|m|
φm,nPm,n(µ)eimλ, (38)
where Pm,n(µ)eimλ are the spherical harmonic functions
[Boyd 01]. Pm,n(µ) stands for the Legendre polynomial.M
is the highest Fourier wavenumber included in the east-west
representation, N(m) is the highest degree of the associated
Legendre polynomials for longitudinal wavenumber m.
The coefficients of the spectral representation (38) are
determined by
φm,n =
∫ 1
−1
1
2π
∫ 2π
0
φ(λ, µ)e−imλPm,n(µ)dλdµ (39)
The inner integral represents a Fourier transform,
φm(µ) =1
2π
∫ 2π
0
φ(λ, µ)e−imλdλ (40)
which is evaluated using a fast Fourier transform routine.
The outer integer is evaluated using Gaussian quadrature on
the transform grid.
φm,n =
J∑j=1
φm(µ)Pm,n(µ)ωj , (41)
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 11
Sequential filtering for the shallow water equations model 11
where µj denotes the Gaussian grid points in the meridional
direction and ωj is the Gaussian weight at point µj .
The meridional grid points are located at the Gaussian
latitudes θj , which are the J roots of the Legendre
polynomial Pj(sin θj) = 0. The number of grid points in
the longitudinal and meridional directions are determined so
as to allow the unaliased representation of quadratic terms,
I ≥ 3M + 1
J ≥ 3N + 1
2
where N is the highest wavenumber retained in the
latitudinal Legendre representation N = maxN(m) = M .
The pseudo spectral method, also known as the spectral
transform method in the geophysical community, of [Orszag
1969, 1970] and [Eliassen et al. 1970] has been used to
tackle the nonlinearity.
In conjunction with the spatial discretization described
before, the time discretization, two semi-implicit time
steps have been used for the initialization. Because of the
hyperbolic type of the shallow water equations, the centered
leapfrog scheme
φk+1m,n − φk−1
m,n
2∆t= F(φkm,n) (42)
has been invoked for the subsequent time steps. After
the leapfrog time-differencing scheme is used to obtain
the solution at t = (k + 1)∆t, a slight time smoothing is
applied to the solution at time k∆t (Asselin filter) .
φkm,n = φkm,n + α[φk+1m,n − 2φkm,n + φk−1
m,n
](43)
replacing the solution at time k. It reduces the amplitude of
different frequencies ν by a factor 1− 4α sin2(ν∆t2 ).
4.2. EnKF set-up and numerical results
In all our numerical experiments a time step of ∆t = 600
sec has been employed. The observations were provided at a
frequency consisting of one set of observations every 36∆t.
4.2.1. Impact of the number of observations and the
number of ensemble members
The impact of the number of observations follows the
findings of [ Fletcher and Zupanski 2008]. In fact after
attaining a number of observations threshold, all the root
mean square errors rmses for all the fields ( namely the
components of the velocity and geopotential) coincide. In
our test the number of the observations threshold was
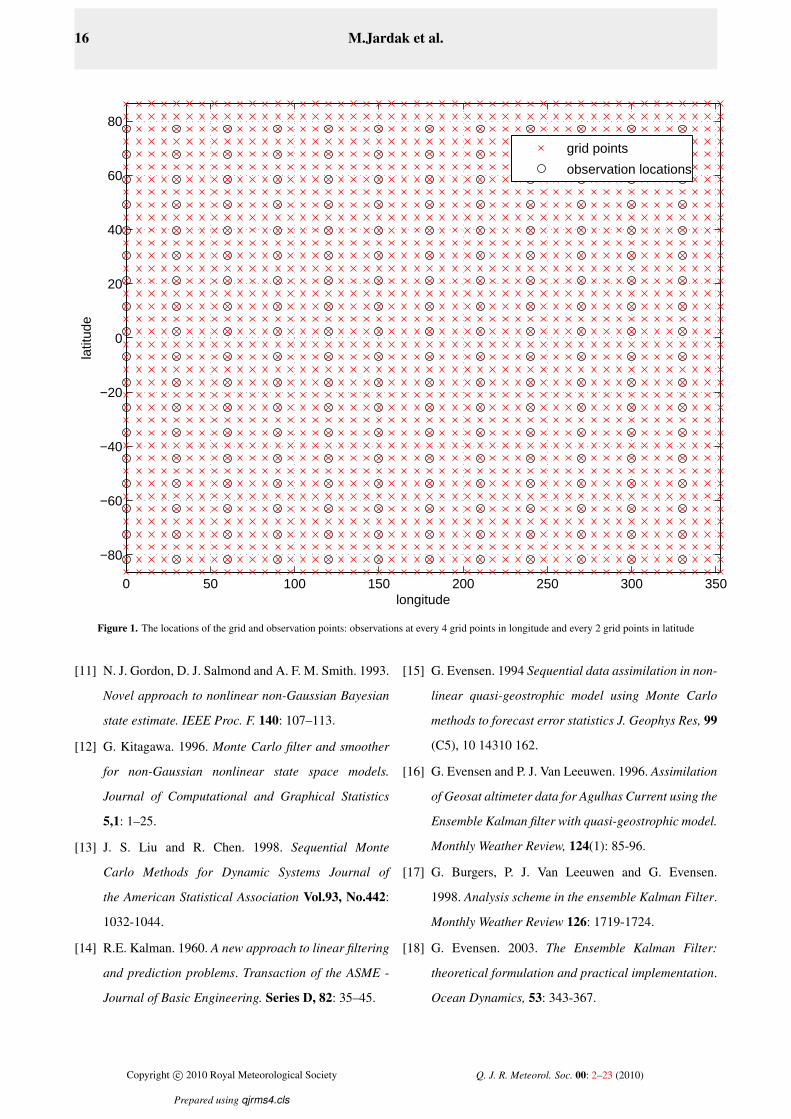
attained at around 912 observations at each observation
time. The observational grid is a subset of the rhomboidal
spectral truncation (48x38) and consists of observations
being distributed at every grid point in the longitude and
every 2 points in the latitude, as presented in figure 1.
The impact of the number of ensemble members on
the results has also been examined. We have conducted
several experiments with different numbers of ensemble
members, namely, 50, 100, 200 and 300 ensemble members,
respectively. Our results reveal that employing only 100
ensemble members was sufficient to successfully perform
the data assimilation and that using higher number of
ensemble members had no impact on the ensuing results.
4.2.2. Linear observation operator case - description of
the EnKF results
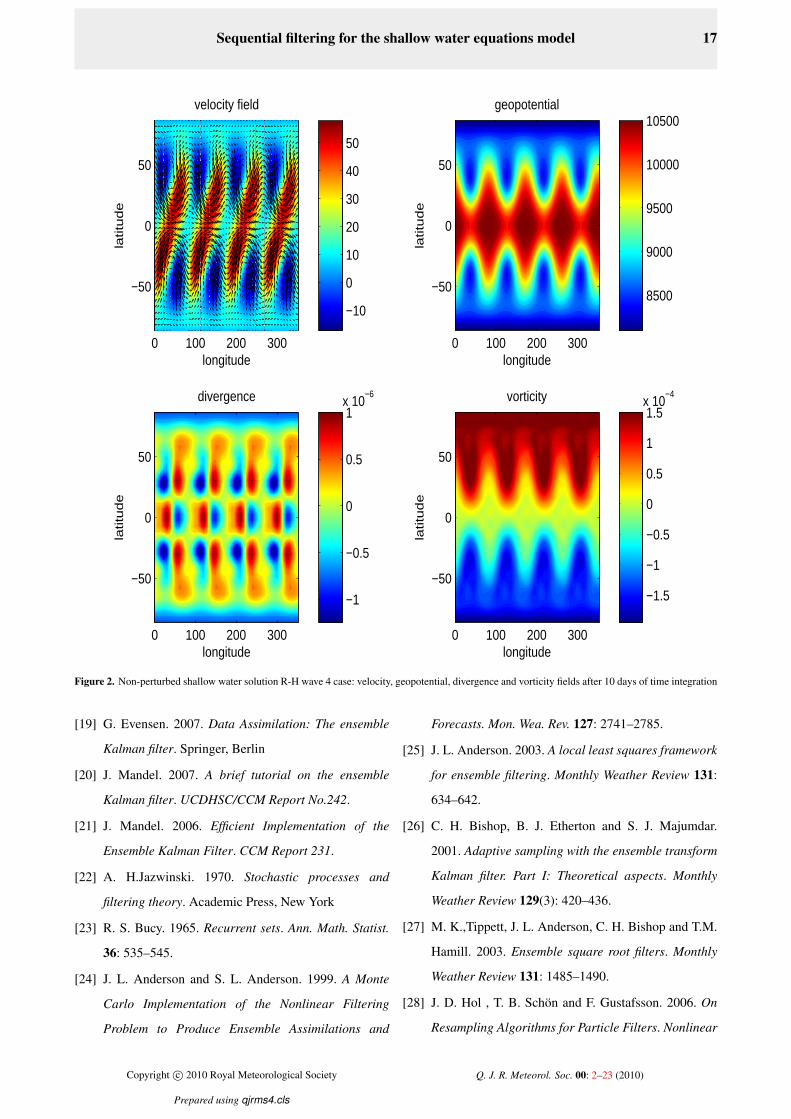
Figure 2 provides an overview of the unperturbed shallow
water solution using the Rossby-Haurwitz wave no.4 as
initial conditions after 10 days of time integration.
In figure 3 we present a 1% random perturbation
around the mean of the geopotential field. This perturbed
field along with the perturbed velocity divergence and vor-
ticity fields will serve as initialization for the observations.
In figure 4 we present an overview of the results
obtained using 10 days EnKF data assimilation time
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 12
12 M.Jardak et al.
integration. The linear observation operator H(u) = u has
been employed, 100 ensemble members were used with 1%
random perturbation around the mean accounting for the
standard deviation for the model error covariance matrix.
In the presence of 1% and 3% random perturbations
around the mean respectively, the RH wave no. 4 test
case preserves its global characteristic shape for more than
30 days of data assimilation time integration. This shows
the resilience of the RH wave no. 4 test case to random
perturbation in the presence of linear observation operator.
4.2.3. Nonlinear observation operator case - description
of the EnKF results
Here we are employing H(u) = u2 as a representative of
a nonlinear observation operator ( we have also tested
H(u) = u4 results not shown) The number of observation
points is 912 ( their distribution in space and time being
identical to the linear observation operator EnKF case).
The EnKF for the nonlinear observation operator H(u) =
u2 starts to manifest a deterioration at a round 5 days
of data assimilation time integration. By 10 days of data
assimilation time integration a full filter divergence takes
place as it can be seen in the rmses as well as in the
corresponding Talagrand diagram. Figure 5 displays the
corresponding Talagrand diagram also known as the rank
score. Contrary to the linear observation operator Talagrand
diagram where a uniform ensemble repartition is observed,
the Talagrand diagram for the nonlinear case displays a
tendency to a weakly U-shaped ensemble repartition. This
result characterizes the onset of filter divergence. In figure
6 we present the true, the EnKF analysis for one ensemble
member and the expected analysis geopotential fields for
5 days data assimilation time integration. This illustration
confirms the validity of the Talagrand diagram. As a matter
of fact, a deterioration of the typical shape of the RH wave
no.4 test case is noticeable.
Figure 7 regroups the Talagrand diagrams and root
mean square errors rmses corresponding to different values
of the random perturbation around the mean, namely
1%, 3% and 6% perturbations. The Talagrand diagrams
display now a non symmetrical U shape characteristic of
filter divergence as well as bias. An increase in the values
of the frequencies follows the increase in the perturbation
percentage. The rmses of the geopotential field, presented in
the same figure, increase accordingly with the perturbation.
In figures 8 and 9 we present the true, the EnKF
analysis for one ensemble member and the expected
analysis geopotential forecast and analysis geopotential
fields for 10 days EnKF window of data assimilation
with 1% and 3% perturbation around the mean. The
same nonlinear observation operator H(u) = u2 has been
employed. The results obtained point to a total loss of shape
and symmetry deterioration of the RH wave no. 4 test case.
The purpose of the this section is not to establish the
onset of filter divergence, rather to show that the fixture
of Evenson [Evenson 2003] is not suitable for nonlinear
observation operator. New efforts to mitigate the problem
of high nonlinearity in EnKF have been undertaken. The
recent work of Kalnay and collaborators, [Kalnay priv.
comm. 2008], [Kalnay and Yang 2008] and [Kalnay and
Yang 2010] suggests an approach involving outer loops of
minimization, borrowed from variational data assimilation
practice. They introduce an empirical convergence criterion
within a nonstandard iterative minimization scheme.
Common to both mentioned algorithms is that they treat
each iteration of minimization as a quadratic sub-problem
and thus rely on the use of traditional Kalman filter linear
analysis update equation in each iteration.
4.3. PF set-up and numerical results
As in the previous (EnKF) section, all our numerical
experiments employ a time step of ∆t = 600sec. The
observations are sampled once every 6 hours i.e. at a
frequency consisting of one observation every 36 time steps.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 13
Sequential filtering for the shallow water equations model 13
4.3.1. The impact of number of particles and of the
resampling strategy
In view of recent results in the literature ( such as
[Van Leeuwen 2009] [Snyder et al. 2008] ) the issue of
choice of an adequate number of particles is of paramount
importance. In order to avoid filter degeneracy we follow
the suggestion of Van-Leeuwen [Van Leeuwen 2009] as
to the choice of suitable number of particles, that should
be not smaller than the number of degrees of freedom of
the simulated system. We tested three cases namely, 1000,
1500 and 1900 particle filters (compare to 48× 38 modes
in the latitude-longitude directions for the spherical-spectral
shallow-water model )
In as far as PF resampling methods are concerned,
we tested three resampling techniques namely, residual,
systematic and multinomial resampling,respectively. All
of them performed equally well with a slight edge
to the systematic resampling technique in as far as
computational efficiency is concerned see [Doucet et al.
2001, Arulampalam et al. 2002 and Van Leeuwen 2009]. A
novel feature introduced here is the equivalent of Talagrand
diagrams, where instead of taking the ensemble members
we took the particles. Then we iterated over the number
of bins (1900 particles, 51 bins). Similar to the ensemble
framework, this diagram could be a good tool to detect
systematic flaws of a particle filter prediction system.
4.3.2. Linear observation operator case
The linear observation operator assuming the formH(u) =
u has been employed for the particle filter case and we do
not show the related results. However, we observe almost
identical results to those obtained for the EnKF linear
observation operator case, in fact the R-H wave no 4 test
case preserves its global characteristic shapes with minor
changes occurring in the center of the recirculation zones at
around 10 days of data assimilation time integration.
4.3.3. Non-linear observation operator case
We consider the impact of nonlinear observation operator
for the particle filter (PF) when H(u) = u2. As displayed
in figure 10, where the true, PF analysis for one particle
geopotential fields for 1% and 3% perturbation around
the mean are depicted. After 10 days data assimilation
time integration,the R-H wave no 4 test case preserves
its global characteristic shape and no distortion nor cell
pattern breakdown can be detected. These results should be
contrasted to our EnKF findings of filter divergence for the
same data assimilation time integration.
A part from the bias ( i.e. the first and last bins) of
the U-shaped diagrams shown in figure 11, we have
uniformity of the frequencies repartition indicates that the
probability distribution has been well sampled. In fig 12
we present the time evolution of the rmses after 10 days
of data assimilation time integration of PF for 1% and
3% perturbation around the mean. The striking result is
that the rmses variation is now bounded in contrast to the
EnKf case where the increase in the corresponding rmses
is quasi-exponential. The effect of degree of nonlinearity
of the observation operator in the PF case has been also
examined. As figure 13 shows that a stronger nonlinearity
(i.eH(u) = exp(u) ) has no substantial effect on the rmses.
Indeed, the rmses envelope is not affected despite presence
of oscillations characteristic of the PF filter.
4.4. MLEF set-up and results
Only 30 ensemble members were sufficient for carrying
out the MLEF runs, while the number of cycles was set to
70. The iterative nonlinear minimization method employed
for cost function minimization was the Flecher-Reeves
nonlinear conjugate gradient algorithm. In each of the
MLEF data assimilation cycles, 5 iterations are performed
to obtain the analysis. The standard deviation of each of the
Gaussian state and observation noise was taken to be 1%
random perturbation around the mean. No localization nor
inflation were used within the ensemble part of this method.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 14
14 M.Jardak et al.
We observe similar results to those obtained for the
EnKF and PF in linear observation operator case, namely
that the global characteristic shapes of the filtered solution
are preserved. This feature is presented in figure
When H(u) = u2, we observe additional aspects in
the divergence and the vorticity fields as it can be seen
in figure after 10 days of model integration with data
assimilation. The striking resemblance between the PF and
MLEF results manifests the successful implementation of
both filters. This result is further confirmed as the degree
of nonlinearity of the observation operators was increased
fromH(u) = u2 toH(u) = eu. Our numerical experiments
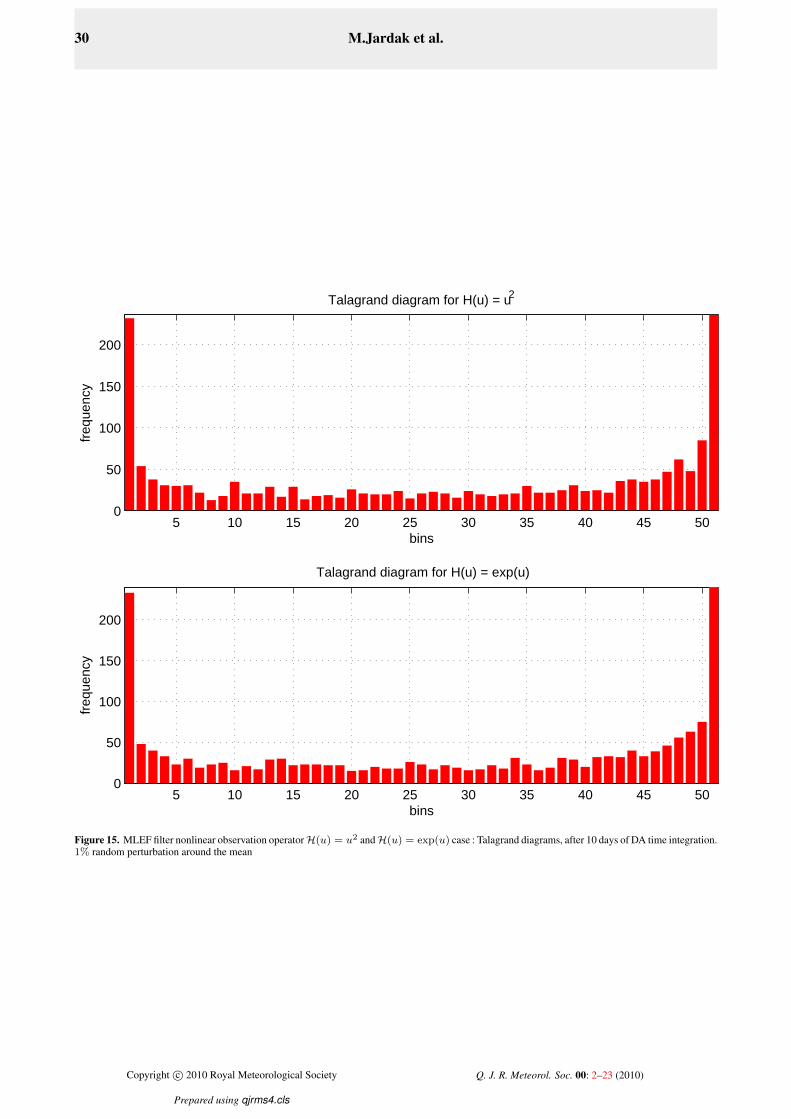
are presented in in figure 14. As presented in figure 15,
we observe that a part from the bias ( i.e. the first and last
bins) of the U-shaped diagrams shown ,we have uniformity
of the frequencies repartition indicates that the probability
distribution has been well sampled. This is in agreement
with our PF findings. The rmses presented in figure 16 are
bounded and the nonlinearity of the observation operator
has no effect on the rmses, consequently the MLEF filter
predicts well the true solution independently of the linearity
of the observation operator.
5. Summary and conclusions
In this paper, a comparison was carried out for the three
most popular ensemble data assimilation methods (EnsDA)
for a spherical nonlinear shallow water equations model
discretized via a spectral model and tested for the Rossby
Haurwitz wave no. 4.
The Monte Carlo version of EnKF, the particle filter PF with
several resampling strategies and finally as a representative
of hybrid filters, the maximum likelihood filter MLEF were
tested in the presence of both linear and highly nonlinear
observation operators. The nonlinear observation operators
replicate and stand as a proxy for more realistic processes
such as cloud, aerosol and precipitation processes, as well
as remote sensing (e.g., satellite and radar) observations.
While the typical EnsDA analysis equation assumes
linearity and Gaussianity for EnKF, (thus fundamentally
preventing this EnsDA from extracting maximum
information from nonlinear observations) we have also
tested a Bayesian filter, the particle filter, whose analysis
equation is nonlinear as well as the MLEF hybrid filter,
which accommodates nonlinear observation operators as
well as non-Gaussianity.
In the case of linear observation operator results for the
three above mentioned sequential data assimilation filters
leads to the conclusion, that the aforementioned methods
are comparable and yield satisfactory results. Amongst the
different error metrics used to assess filter divergence, we
chose to retain the Talgrand diagram (known also as Rank
Score) , the usual rmse statistics. Results of Talagrand
diagram for EnKF in the presence of nonlinear operators
show that filter divergence onset occurs at about 5 days of
data assimilation using the R-H wave no.4 test case. We
conclude that EnKF with Evensen’s fixture for nonlinearity
fails to converge for nonlinear observation operators . In
contrast the other two filters (PF and MLEF) handled well
the issue of nonlinearity of the observation operators as well
as non-Gaussianity, as expected. The three error metrics
retained support the results obtained.
These results are of course a function of our particular
implementation of the EnKF, PF and MLEF, respectively
and are a function of the number of particles (number of
ensemble members) the number of observations as well
as the particular model tested. In as far as computational
efficiency, the MLEF was found to be faster than the EnKF,
while the PF filter proved to be the most time consuming in
as far as the shallow water equations model with nonlinear
observation operator is concerned.
The EnKF version for the nonlinear observation oper-
ator H(u) = u2 is displaying a significant discrepancy
between the true and filtered EnKF solutions. is consid-
erable. We join here many authors, [Jardak et al. 2010],
[Nakano et al. 2007] and [Apte et al. 2008A,2008B] to
cite but a few, to draw the conclusion that even with
the modification suggested by [Evensen 2003], the EnKF
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 15
Sequential filtering for the shallow water equations model 15
filter diverges in the case of nonlinear observation oper-
ator applied here to the shallow water equations model.
In conclusion, we can only compare between the PF and
the MLEF filters in the presence of nonlinear observation
operators. Both the PF and the MLEF filters exhibit good
performance in terms of results of sequential data assimi-
lation as evidenced by the rmses and the divergence statis-
tics. for the tests conducted with the nonlinear observation
operators the MLEF method appears to have an edge in
terms of CPU time over the PF method method with SR
resampling. Indeed, the PF results were obtained using
1000-1900 particles, while MLEF obtained similar results
for only 30-300 ensembles.
Acknowledgements
The research of Prof. I.M. Navon and Dr. M. Jardak was
supported by the National Science Foundation (NSF), grant
ATM-03727818. The authors also acknowledge the support
by NASA Modeling, Analysis, and Prediction Program
under Award NNG06GC67G. Prof. Navon acknowledges
the National Science Foundation (NSF), grant ATM-
0931198. Dr. Zupanski acknowledges the National Science
Foundation (NSF), grant ATM-0930265. Finally, Dr.
Jardak is grateful to W.H.Hanya and M.O.Nefysa for the
continuous help.
References
[1] D. L. Williamson, J. B. Drake, J. J. Hack, R. Jacob
and P. N. Swarztrauber.1992. A standard test set for
numerical approximations to shallow-water equations
in spherical geometry. J. Comput. Phys 102: 211–224.
[2] D. L. Williamson. 1997. Climate Simulations with
a spectral semi-Lagrangian model with linear
grid,” Numerical Methods in Atmospheric and
Ocean Modelling. Canadian Meteorological and
Oceanographic Society 279–292.
[3] D. L. Williamson. 2007. The Evolution of Dynamical
Cores for Global Atmospheric Models. Journal of the
Meteorological Society of Japan 85B: 241–269.
[4] R. Jakob-Chien, J. J. Hack and D. L. Williamson.1995.
Spectral transform solutions to the shallow water test
set. J. Comput. Phys 119: 164–187 .
[5] J. P. Boyd , 2001. Chebyshev and Fourier Spectral
Methods, Second Edition (Revised). Dover Publishing
[6] M. L. Berliner and C. K. Wikle. 2007. A Bayesian
tutorial for data assimilation. Physica D. 30: 1–16.
[7] M. L. Berliner and C. K. Wikle. 2007. Approximate
importance sampling Monte Carlo for data assimila-
tion. Physica D. 30: 37-49
[8] A. Doucet, A. , S. Godsill, S. and C. Andrieu. 2000.
On Sequential Monte Carlo sampling methods for
Bayesian filtering. Statistics and Computing. 10 (3):
197–208.
[9] A. Doucet, J. F. G. de Freitas and N. J. Gordon. 2001.
An introduction to sequential Monte Carlo methods.
Sequential Monte Carlo Methods in Practice, Doucet,
A. , de Freitas, J.F.G and Gordon, N.J (eds.) Springer-
Verlag, New York
[10] M. S. Arulampalam, S. Maskell, N. Gordon and
T. Clapp. 2002. A Tutorial on Particle Filters for
Online Nonlinear/Non-Gaussian Bayesian Tracking.
IEEE transactions on signal processing. Vol(150)
no.2: 174–188.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 16
16 M.Jardak et al.
0 50 100 150 200 250 300 350
−80
−60
−40
−20
0
20
40
60
80
longitude
latit
ude
grid points
observation locations
Figure 1. The locations of the grid and observation points: observations at every 4 grid points in longitude and every 2 grid points in latitude
[11] N. J. Gordon, D. J. Salmond and A. F. M. Smith. 1993.
Novel approach to nonlinear non-Gaussian Bayesian
state estimate. IEEE Proc. F. 140: 107–113.
[12] G. Kitagawa. 1996. Monte Carlo filter and smoother
for non-Gaussian nonlinear state space models.
Journal of Computational and Graphical Statistics
5,1: 1–25.
[13] J. S. Liu and R. Chen. 1998. Sequential Monte
Carlo Methods for Dynamic Systems Journal of
the American Statistical Association Vol.93, No.442:
1032-1044.
[14] R.E. Kalman. 1960. A new approach to linear filtering
and prediction problems. Transaction of the ASME -
Journal of Basic Engineering. Series D, 82: 35–45.
[15] G. Evensen. 1994 Sequential data assimilation in non-
linear quasi-geostrophic model using Monte Carlo
methods to forecast error statistics J. Geophys Res, 99
(C5), 10 14310 162.
[16] G. Evensen and P. J. Van Leeuwen. 1996. Assimilation
of Geosat altimeter data for Agulhas Current using the
Ensemble Kalman filter with quasi-geostrophic model.
Monthly Weather Review, 124(1): 85-96.
[17] G. Burgers, P. J. Van Leeuwen and G. Evensen.
1998. Analysis scheme in the ensemble Kalman Filter.
Monthly Weather Review 126: 1719-1724.
[18] G. Evensen. 2003. The Ensemble Kalman Filter:
theoretical formulation and practical implementation.
Ocean Dynamics, 53: 343-367.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 17
Sequential filtering for the shallow water equations model 17
0 100 200 300
−50
0
50
longitude
latitu
de
velocity field
−10
0
10
20
30
40
50
longitude
latitu
de
geopotential
0 100 200 300
−50
0
50
8500
9000
9500
10000
10500
longitude
latitu
de
divergence
0 100 200 300
−50
0
50
−1
−0.5
0
0.5
1x 10
−6
longitude
latitu
de
vorticity
0 100 200 300
−50
0
50
−1.5
−1
−0.5
0
0.5
1
1.5x 10
−4
Figure 2. Non-perturbed shallow water solution R-H wave 4 case: velocity, geopotential, divergence and vorticity fields after 10 days of time integration
[19] G. Evensen. 2007. Data Assimilation: The ensemble
Kalman filter. Springer, Berlin
[20] J. Mandel. 2007. A brief tutorial on the ensemble
Kalman filter. UCDHSC/CCM Report No.242.
[21] J. Mandel. 2006. Efficient Implementation of the
Ensemble Kalman Filter. CCM Report 231.
[22] A. H.Jazwinski. 1970. Stochastic processes and
filtering theory. Academic Press, New York
[23] R. S. Bucy. 1965. Recurrent sets. Ann. Math. Statist.
36: 535–545.
[24] J. L. Anderson and S. L. Anderson. 1999. A Monte
Carlo Implementation of the Nonlinear Filtering
Problem to Produce Ensemble Assimilations and
Forecasts. Mon. Wea. Rev. 127: 2741–2785.
[25] J. L. Anderson. 2003. A local least squares framework
for ensemble filtering. Monthly Weather Review 131:
634–642.
[26] C. H. Bishop, B. J. Etherton and S. J. Majumdar.
2001. Adaptive sampling with the ensemble transform
Kalman filter. Part I: Theoretical aspects. Monthly
Weather Review 129(3): 420–436.
[27] M. K.,Tippett, J. L. Anderson, C. H. Bishop and T.M.
Hamill. 2003. Ensemble square root filters. Monthly
Weather Review 131: 1485–1490.
[28] J. D. Hol , T. B. Schon and F. Gustafsson. 2006. On
Resampling Algorithms for Particle Filters. Nonlinear
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 18
18 M.Jardak et al.
longitude
latit
ude
0 50 100 150 200 250 300 350
−80
−60
−40
−20
0
20
40
60
80
8000
8500
9000
9500
10000
10500
Figure 3. EnKF filter linear observation operator case : initial perturbation geopotential field
Statistical Signal Processing Workshop, Cambridge,
United Kingdom.
[29] N. Metropolis, and S. Ulam. 1944. The Monte Carlo
Method. J. Amer. Stat. Assoc. 44: 335–341.
[30] J. L. Lewis, S. Lakshivarahan and S. K. Dhall.
2006. Dynamic Data Assimilation: A least squares
approach. Cambridge University Press, in the series
on Encyclopedia of Mathematics and its Applications
Volume 104
[31] E. N. Lorenz. 1963. Deterministic nonperiodic flow. J.
Atmos. Sci., 20:130–141 .
[32] E. N. Lorenz. 1969. The predictability of a flow which
possesses many scales of motion. Tellus 21: 289–307.
[33] S. E. Cohn. 1997. An introduction to estimation
theory. Journal of the Meteorological Society of Japan
Vol.75, No.1B 257–288
[34] X. Xiong, I. M. Navon and B. Uzunoglu. 2006. A
Note on the Particle Filter with Posterior Gaussian
Resampling Tellus 58A: 456–460.
[35] P. Houtekamer and H. Mitchell. 1998. Data assimila-
tion using an ensemble Kalman filter technique.Mon.
Wea. Rev. 126: 796–811.
[36] P. L. Houtekamer and H. L. Mitchell. 2001. A
Sequential Ensemble Kalman Filter for Atmospheric
Data Assimilation. Mon.Wea.Rev.129: 123–137.
[37] P. L. Houtekamer, H. L. Mitchell, G. Pellerin, M.
Buehner, M. Charron, L. Spacek and B. Hansen. 2005.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 19
Sequential filtering for the shallow water equations model 19
0 100 200 300
−50
0
50
longitude
latit
ude
velocity field
−20
0
20
40
60
longitude
latit
ude
geopotential
0 100 200 300
−50
0
50
8500
9000
9500
10000
10500
longitude
latit
ude
divergence
0 100 200 300
−50
0
50
−8
−6
−4
−2
0
2
4
6
x 10−6
longitude
latit
ude
vorticity
0 100 200 300
−50
0
50
−1.5
−1
−0.5
0
0.5
1
1.5x 10
−4
Figure 4. EnKF filter linear observation operator case : velocity, geopotential, divergence and vorticity fields after 10 days of DA time integration. 100ensemble members and 1% random perturbation around the mean
A Sequential Ensemble Kalman Filter for Atmospheric
Data Assimilation Mon.Wea.Rev.133: 604–620.
[38] S. L. Dance. 2004. Issues in high resolution limited
area data assimilation for quantitative precipitation
forecasting. Physica D 196: 1–27.
[39] G. Kotecha and P. M. Djuric. 2003. Gaussian particle
filtering IEEE Trans. Signal Processing 51: 2592–
2601.
[40] D. E. Goldberg. 1989. Genetic algorithms in search,
optimization and machine learning Addison-Wesley,
Reading.
[41] B. W. Silverman. 1986. Density Estimation for
Statistics and Data Analysis. Chapman and Hall
[42] T. Bengtsson, P. Bickel, and B. Li. 2008. Curse-of-
dimensionality revisited:Collapse of the particle filter
in very large scale systems. Probability and Statistics:
Essays in Honor of David A. Freedman Vol. 2, 316–
334 .
[43] P. Bickel, B. Li and T. Bengtsson. 2008. Sharp
Failure Rates for the Bootstrap Particle Filter in High
Dimensions. IMS Collections: Pushing the Limits of
Contemporary Statistics: Contributions in Honor of
Jayanta K. Ghosh Vol.3: 318-329 .
[44] C. Snyder, T. Bengtsson, P. Bickel, and J.L. Anderson.
2008 Obstacles to high-dimensional particle filtering
Mon. Wea. Rev. Vol 136, No12 ,4629–4640.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 20
20 M.Jardak et al.
5 10 15 20 25 30 35 40 45 500
50
100
150
200
bins
freq
uenc
y
Talagrand diagram
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5300
320
340
360
380rm
seφ
time(days)
Figure 5. EnKF filter non-linear observation operator caseH(u) = u2: time evolution of the geopotential rmse and Talagrand diagram after 5 days dataassimilation of time integration
[45] D. Zupanski. 1997. A general weak constraint
applicable to operational 4DVAR data assimilation
systems. Mon.Wea.Rev. 125: 2274-2292
[46] M. Zupanski. 2005. Maximum Likelihood Ensemble
Filter. Part 1: the theoretical aspect. Mon.Wea.Rev.
133: 1710–1726.
[47] D. Zupanski, M. Zupanski. 2006. Model error
estimation employing ensemble data assimilation
approach Mon.Wea.Rev. 134: 137–1354.
[48] M. Zupanski, I. M. Navon and D. Zupanski. 2008.
The Maximum Likelihood Ensemble Filter as a
non-differentiable minumization algorithm Q.J.Roy.
Meteor.Soc. 134: 1039–1050
[49] M. Jardak, I. M. Navon and M. Zupanski. 2010.
Comparison of Sequential data assimilation methods
for the Kuramoto-Sivashinsky equation. International
Journal for Numerical Methods in Fluids 136 Issue 4,
374–402
[50] A. C. Lorenc. 1986. Analysis methods for numerical
weather prediction Q. J. Roy. Meteor. Soc. 112: 1177-
1194 .
[51] T. M. Hamill, J. S. Whitaker and C. Snyder. 2001.
Distance-Dependent Filtering of Background Error
Covariance Estimates in an Ensemble Kalman Filter
Mon.Wea.Rev.,129: 2776–2790 .
[52] T. M. Hamill and C. Snyder. 2000. A Hybrid
Ensemble Kalman Filter-3D Variational Analysis
Scheme. Mon.Wea.Rev.128: 2905–2919 .
[53] T. M. Hamill. 2006. Ensemble-based atmospheric
data assimilation. Predictability of Weather and
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 21
Sequential filtering for the shallow water equations model 21
longitude
latit
ude
true
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
longitude
latit
ude
EnkF analysis geopotential field for one ensemble member
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
longitude
latit
ude
EnKF expected analysis geopotential field
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
Figure 6. EnKF filter non-linear observation operator case H(u) = u2: true, the EnKF analysis for one ensemble member and the expected analysisgeopotential fields after 5 days of data assimilation time integration. 100 ensemble members and 1% random perturbation around the mean
Climate, Cambridge Press, 124–156 .
[54] T.M. Hamill. 2001. Interpretation of rank histogram
for verifying ensemble forecasts. Mon. Weather Rev.
129(3): 550–560
[55] L. Nerger, ,W. Hiller, J. Schrater. 2005. A comparison
of error subspace Kalman filters. Tellus A,57 (5): 715–
735
[56] G. Gaspari, S. E. Cohn. 1999. Construction of
correlation functions in two and three dimensions. Q.
J. Roy. Meteor Soc. Vol 125 Issue 554:723-757 .
[57] S. Nakano, G. Ueno and T. Higuchi T. 2007. Merging
particle filter for sequential data assimilation.
Nonlinear Processes in Geophysics 14: 395409
[58] A. Apte , C. K. R. T. Jones, A. M. Stuart and J. Voss.
2008. Data assimilation: Mathematical and statistical
perspectives. Int. J. Numer. Meth. Fluids 56: 1033–
1046
[59] A. Apte , C. K. R. T. Jones and A. M. Stuart. 2008.
Bayesian approach to Lagrangian data assimilation.
Tellus A,60: 336–347
[60] R. K. Smith and D. G. Dritschel. 2006. Revisiting
the Rossby–Haurwitz wave test case with contour
advection. Journal of Computational Physics 217,
Issue 2, 473–484
[61] P. J. van Leeuwen. 2009. Particle filtering in
geophysical systems. Mon.Wea.Rev. 137: Issue 12,
4089–4114
[62] E. Kalnay. 2010 Ensemble Kalman Filter: Current
Status and Potential Data Assimilation: Making Sense
of Observations William Lahoz, Boris Khattatov,
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 22
22 M.Jardak et al.
10 20 30 40 500
100
200
300
400
500
bins
freq
uenc
y
Talagrand diagram for 1% perturbation
10 20 30 40 500
50
100
150
200
250
300
350
bins
freq
uenc
y
Talagrand diagram for 3% perturbation
10 20 30 40 500
50
100
150
bins
freq
uenc
y
Talagrand diagram for 6% perturbation
0 2 4 6 8 100
200
400
600
800
1000
time(days)
rmse
φ
1% perturbation3% perturbation6% perturbation
Figure 7. EnKF filter non-linear observation operator caseH(u) = u2 and for different random perturabtion around the mean: Talagrand diagrams andtime evolution of root mean square error for the geopotential field for 10 days of time integration
Richard Menard (Editors) Springer
[63] P. Sakov and P. Oke. 2008. Implications of the Form of
the Ensemble Transformation in the Ensemble Square
Root Filters.Mon.Wea.Rev.136: 1042–1052
[64] B. Haurwitz. 1940. The motion of atmospheric
disturbances on the spherical earth. J. Mar. Res. 3
254–267
[65] J. Thuburn and Y. Li. 2000. Numerical simulations of
Rossby-Haurwitz waves. Tellus A 52 (2): 181–189
[66] B. J. Hoskins. 1973. Stability of the Rossby-Haurwitz
wave. Quart. J. Roy. Meteorol. Soc.99: 723–745
[67] N.A. Phillips. 1959. Numerical integration of the
primitive equations on the hemisphere. Mon. Wea.
Rev.87: 333–345
[68] C. G. Rossby and collaborators. 1939. Relation
between variations in the intensity of the zonal
circulation of the atmosphere and the displacements of
the semi-permanent centres of action. J. Marine Res.
2: 38–55
[69] C. A. Pires, O. Talagrand and M. Bocquet. 2010. Diag-
nosis and impacts of non-Gaussianity of innovations
in data assimilation. Physica D 239: 1701–1717
[70] M. Bocquet. 2008. Issues of nonlinearity and non-
gaussianity Contribution to the WWRP/THORPEX.
workshop on 4D-Var and ensemble Kalman filter
inter-comparisons Buenos Aires
[71] A.H. Murphy. 1973. A New Vector Partition of the
Probability Score. Journal of Applied Meteorology
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 23
Sequential filtering for the shallow water equations model 23
longitude
latit
ude
true
0 50 100 150 200 250 300 350
−50
0
50
longitude
latit
ude
One ensemble member of the EnKF analysis
0 50 100 150 200 250 300 350
−50
0
50
longitude
latit
ude
Expected EnKF analysis
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
8000
9000
10000
8000
9000
10000
Figure 8. EnKF filter non-linear observation operator case H(u) = u2: true, the EnKF analysis for one ensemble member and the expected analysisgeopotential fields after 10 days of data assimilation time integration, 100 ensemble members and 1% random perturbation around the mean
vol. 12, Issue 4: 595–600
[72] A.H. Murphy. 1973. What is a good forecast? An essay
on the nature of goodness in weather forecasting.
Weather and forecasting. 8: 281–293
[73] D.S. Wilks. 1995. Statistical Methods in the Atmos-
pheric Sciences. Academic Press, New York
[74] O. Talagrand, R. Vautard, and B. Strauss. 1997. Evalu-
ation of probabilistic prediction systems. Proceedings,
ECMWF Workshop on Predictability. ECMWF. 1–25
[75] E. Kalnay and S. C Yang. 2010. Accelerating the
spin-up of Ensemble Kalman Filtering. Quart. J. Roy.
Meteor. Soc. in press
[76] J. Diard, P. Bessiere and E. Mazer. 2003. A survey of
probabilistic models, using the bayesian programming
methodology as unifying framework. The second Inter-
national Conference on Computational Intelligence,
Robotics and Autonomous Systems, Singapore
[77] O. Cappe, S.J. Godsill and E. Moulines. 2007. An
Overview of Existing Methods and Recent Advances
in Sequential Monte Carlo. Proceedings of the IEEE
95: 899–924
[78] A.M Stuart. 2010. Inverse Problems: A Bayesian
Prespective. Acta Numerica Vol 19: 451–559
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 24
24 M.Jardak et al.
longitude
latit
ude
true
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
longitude
latit
ude
One ensemble member of the EnKF analysis
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
longitude
latit
ude
Expected EnKF analysis
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
Figure 9. EnKF filter non-linear observation operator case H(u) = u2: true, the EnKF analysis for one ensemble member and the expected analysisgeopotential fields after 10 days of data assimilation time integration, 100 ensemble members and 3% random perturbation around the mean
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 25
Sequential filtering for the shallow water equations model 25
longitude
latit
ude
true geopotential field
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
longitude
latit
ude
PF geopotential field, run with 3% perturbation around the mean
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
11000
longitude
latit
ude
PF geopotential field, run with 1% perturbation around the mean
0 50 100 150 200 250 300 350
−50
0
50
8000
9000
10000
Figure 10. PF filter non-linear observation operator caseH(u) = u2: true, and PF geopotential field with 1% and 3% random perturbation around themean after 10 days of time integration. 1900 particles
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 26
26 M.Jardak et al.
5 10 15 20 25 30 35 40 45 500
50
100
150
200
250
300
350
bins
freq
uenc
y
Talagrand diagram for 3% random perturbation
5 10 15 20 25 30 35 40 45 500
100
200
300
400
500
600
bins
freq
uenc
y
Talagrand diagram for 1% random perturbation
Figure 11. PF filter non-linear observation operator caseH(u) = u2: Talagrand diagrams after 10 days of time integration, 1900 particles for 1% and3% random perturbation around the mean
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 27
Sequential filtering for the shallow water equations model 27
0 1 2 3 4 5 6 7 8 9 10500
520
540
560
580
600
620
time(days)
rmse
φ
1% perturbation around the mean3% perturbation around the mean
Figure 12. PF filter non-linear observation operator caseH(u) = u2: time evolution of the geopotential rmse 1% and 3% random perturbation aroundthe mean
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 28
28 M.Jardak et al.
0 1 2 3 4 5 6 7 8 9 10500
505
510
515
520
525
530
535
540
545
time(days)
rmse
φ
H(u) = u2
H(u) = exp(u)
Figure 13. PF non-linear observation operatorH(u) = u2 andH(u) = exp(u) case: time evolution of the geopotential rmse 1% random perturbationaround the mean
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 29
Sequential filtering for the shallow water equations model 29
longitude
latit
ude
Analysis geopotential field H(u) = u2
5 10 15 20 25 30 35 40 45
5
10
15
20
25
30
35
Analysis geopotential field H(u) = exp(u)
latit
ude
longitude
5 10 15 20 25 30 35 40 45
5
10
15
20
25
30
35
8500
9000
9500
10000
10500
8500
9000
9500
10000
10500
Figure 14. MLEF filter nonlinear observation operatorH(u) = u2 andH(u) = exp(u) case : geopotential field, after 10 days of DA time integration.1% random perturbation around the mean.
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 30
30 M.Jardak et al.
5 10 15 20 25 30 35 40 45 500
50
100
150
200
bins
freq
uenc
y
Talagrand diagram for H(u) = exp(u)
5 10 15 20 25 30 35 40 45 500
50
100
150
200
bins
freq
uenc
y
Talagrand diagram for H(u) = u2
Figure 15. MLEF filter nonlinear observation operatorH(u) = u2 andH(u) = exp(u) case : Talagrand diagrams, after 10 days of DA time integration.1% random perturbation around the mean
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls
Page 31
Sequential filtering for the shallow water equations model 31
0 1 2 3 4 5 6 7 8 9 100
100
200
300
400
500
600
time(days)
rmse
φ
H(u) =exp(u)
H(u) = u2
Figure 16. MLEF filter nonlinear observation operator H(u) = u2 and H(u) = exp(u) case: time evolution of the geopotential rmse. 1% randomperturbation around the mean
Copyright c© 2010 Royal Meteorological Society Q. J. R. Meteorol. Soc. 00: 2–23 (2010)
Prepared using qjrms4.cls