66
Computation and Application of Balanced Model Order Reduction D.C. Sorensen Collaborators: M. Heinkenschloss, A.C. Antoulas and K. Sun Support: NSF and AFOSR MIT Nov 2007
Computation and Application
of
Balanced Model Order Reduction
D.C. Sorensen
I Collaborators: M. Heinkenschloss, A.C. Antoulas and K. Sun
I Support: NSF and AFOSR
MIT Nov 2007
Projection Methods : Large Scale Problems
Brief Intro to Model Reduction
Gramian Based Model Reduction: Balanced Reduction
Solving Large Lyapunov Equations: Approximate Balancing1M vars now possible
Balanced Reduction of Oseen Eqns: Extension toDescriptor System
Domain Decomposition: Couple Linear withNonlinear Domains
Neural Modeling: Local Reduction ⇒ Many Interactions
D.C. Sorensen 2
LTI Systems and Model Reduction
x = Ax + Bu
y = Cx + Du
A ∈ Rn×n, B ∈ Rn×m, C ∈ Rp×n,D ∈ Rp×m n >> m, p
Construct LOW dimensional system
˙x = Ax + Bu
y = Cx + Du
Goal: y should approximate y
Want the small system response to be the same asthe original system response to the same input
D.C. Sorensen 3
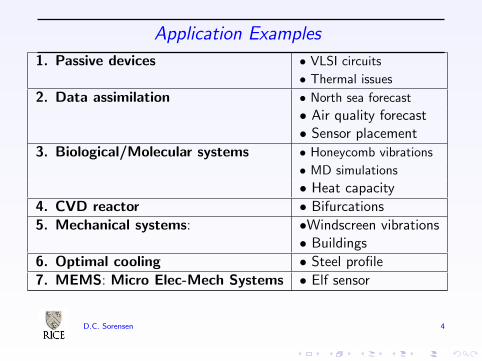
Application Examples
1. Passive devices • VLSI circuits
• Thermal issues
2. Data assimilation • North sea forecast
• Air quality forecast• Sensor placement
3. Biological/Molecular systems • Honeycomb vibrations
• MD simulations
• Heat capacity
4. CVD reactor • Bifurcations
5. Mechanical systems: •Windscreen vibrations• Buildings
6. Optimal cooling • Steel profile
7. MEMS: Micro Elec-Mech Systems • Elf sensor
D.C. Sorensen 4
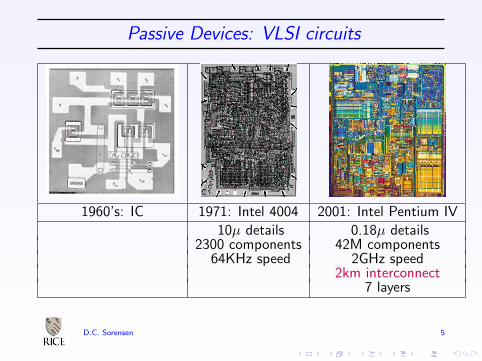
Passive Devices: VLSI circuits
1960’s: IC 1971: Intel 4004 2001: Intel Pentium IV
10µ details 0.18µ details2300 components 42M components
64KHz speed 2GHz speed2km interconnect
7 layers
D.C. Sorensen 5
LTI Systems and Model Reduction
Time Domain
x = Ax + Bu
y = Cx
A ∈ Rn×n, B ∈ Rn×m, C ∈ Rp×n, n >> m, p
Frequency Domain
sx = Ax + Bu
y = Cx
Transfer Function
H(s) ≡ C(sI− A)−1B, y(s) = H(s)u(s)
This is an p ×m matrix with rational functions as entries
D.C. Sorensen 6
Model Reduction
Construct a new system A, B, C with LOW dimension k << n
˙x = Ax + Bu
y = Cx
Goal: Preserve system response
y should approximate y
Rational Approximation :
y − y = (H(s)− ˆH(s))u(s)
D.C. Sorensen 7
Model Reduction by Projection
Approximate x ∈ SV = Range(V) k-diml. subspacei.e. Put x = Vx, and then force
WT [V ˙x − (AVx + Bu)] = 0
y = CVx
If WTV = Ik , then the k dimensional reduced model is
˙x = Ax + Bu
y = Cx
where A = WTAV, B = WTB, C = CV.
D.C. Sorensen 8
Moment Matching ↔ Krylov Subspace Projection
Based on Lanczos, Arnoldi, Rational Krylov methods
Pade via Lanczos (PVL)
Freund, Feldmann
Bai
Multipoint Rational Interpolation
Grimme
Gallivan, Grimme, Van Dooren
Recent: Optimal H2 approximation via interpolationGugercin, Antoulas, Beattie
D.C. Sorensen 9

Gramian Based Model Reduction
Proper Orthogonal Decomposition (POD)Principal Component Analysis (PCA)
x(t) = f(x(t),u(t)), y = g(x(t),u(t))
The Gramian
P =
∫ ∞
ox(τ)x(τ)Tdτ
Eigenvectors of P
P = VS2VT
Orthogonal Basisx(t) = VSw(t)
D.C. Sorensen 10
PCA or POD Reduced Basis
Low Rank Approximation
x ≈ Vk xk(t)
Galerkin condition – Global Basis
˙xk = VTk f(Vk xk(t),u(t))
Global Approximation Error (H2 bound for LTI)
‖x− Vk xk‖2 ≈ σk+1
Snapshot Approximation to P
P ≈ 1
m
m∑j=1
x(tj)x(tj)T = XXT
Truncate SVD : X = VSUT ≈ VkSkUTk
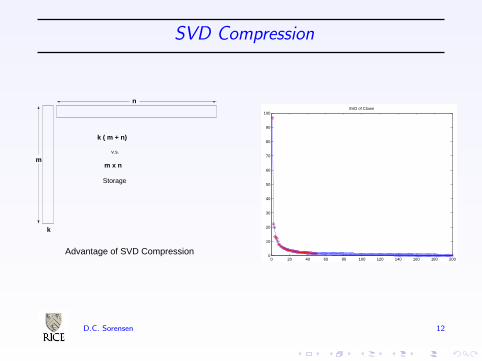
SVD Compression
m
k ( m + n)
m x n
v.s.
Storage
Advantage of SVD Compression
k
n
0 20 40 60 80 100 120 140 160 180 2000
10
20
30
40
50
60
70
80
90
100SVD of Clown
D.C. Sorensen 12
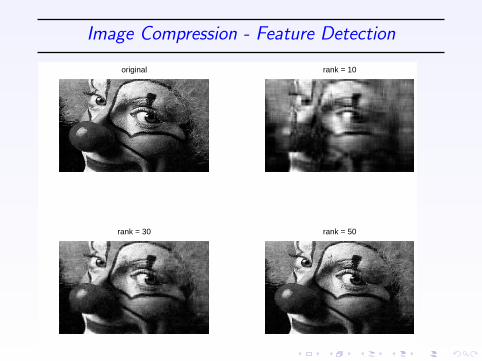
Image Compression - Feature Detection
original rank = 10
rank = 30 rank = 50
POD in CFD
Extensive Literature
Karhunen-Loeve, L. Sirovich
Burns, King
Kunisch and Volkwein
Gunzburger
Many, many others
Incorporating Observations – Balancing
Lall, Marsden and Glavaski
K. Willcox and J. Peraire
D.C. Sorensen 14
POD for LTI systems
Impulse Response: H(t) = C(tI− A)−1B, t ≥ 0
Input to State Map: x(t) = eAtB
Controllability Gramian:
P =
∫ ∞
ox(τ)x(τ)Tdτ =
∫ ∞
oeAτBBT eAT τdτ
State to Output Map: y(t) = CeAtx(0)
Observability Gramian:
Q =
∫ ∞
oeAT τCTCeAτdτ
D.C. Sorensen 15
Balanced Reduction (Moore 81)
Lyapunov Equations for system Gramians
AP + PAT + BBT = 0 ATQ+QA + CTC = 0
With P = Q = S : Want Gramians Diagonal and Equal
States Difficult to Reach are also Difficult to Observe
Reduced Model Ak = WTk AVk , Bk = WT
k B , Ck = CkVk
I PVk = WkSk QWk = VkSk
I Reduced Model Gramians Pk = Sk and Qk = Sk .
D.C. Sorensen 16
Hankel Norm Error estimate (Glover 84)
Why Balanced Truncation?
I Hankel singular values =√
λ(PQ)
I Model reduction H∞ error (Glover)
‖y − y‖2 ≤ 2× (sum neglected singular values)‖u‖2I Extends to MIMO
I Preserves Stability
Key Challenge
I Approximately solve large scale Lyapunov Equationsin Low Rank Factored Form
D.C. Sorensen 17
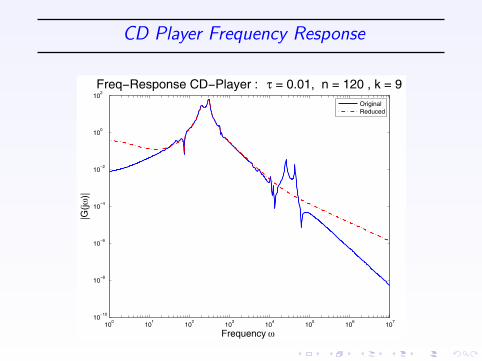
CD Player Frequency Response
100
101
102
103
104
105
106
107
10−10
10−8
10−6
10−4
10−2
100
102
Freq−Response CD−Player : τ = 0.01, n = 120 , k = 9|G
(jω)|
Frequency ω
OriginalReduced
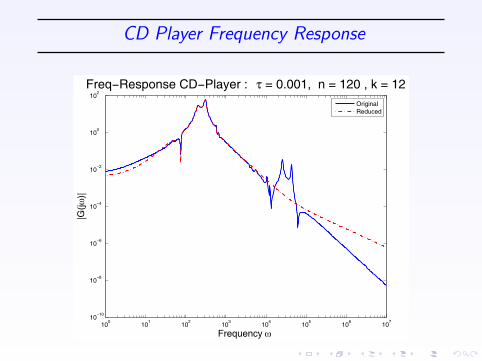
CD Player Frequency Response
100
101
102
103
104
105
106
107
10−10
10−8
10−6
10−4
10−2
100
102
Freq−Response CD−Player : τ = 0.001, n = 120 , k = 12|G
(jω)|
Frequency ω
OriginalReduced
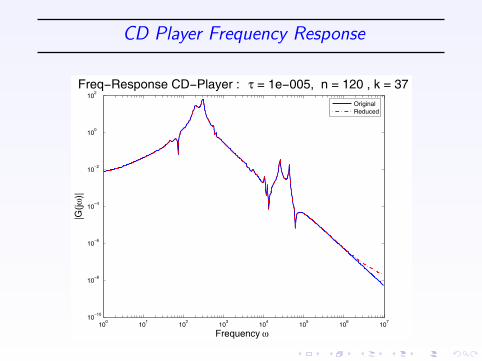
CD Player Frequency Response
100
101
102
103
104
105
106
107
10−10
10−8
10−6
10−4
10−2
100
102
Freq−Response CD−Player : τ = 1e−005, n = 120 , k = 37|G
(jω)|
Frequency ω
OriginalReduced
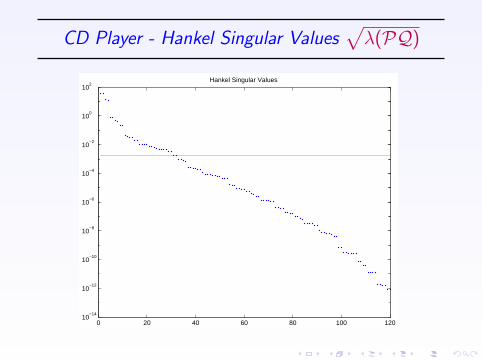
CD Player - Hankel Singular Values√
λ(PQ)
0 20 40 60 80 100 12010
−14
10−12
10−10
10−8
10−6
10−4
10−2
100
102
Hankel Singular Values
D.C. Sorensen 21
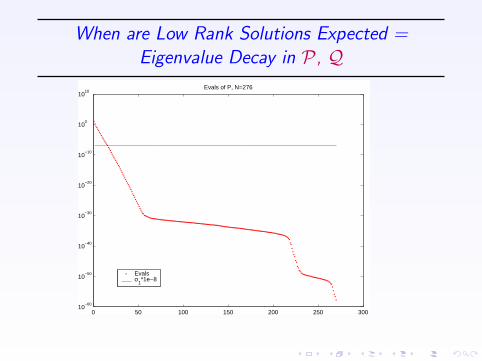
When are Low Rank Solutions Expected =Eigenvalue Decay in P , Q
0 50 100 150 200 250 30010
−60
10−50
10−40
10−30
10−20
10−10
100
1010
Evals of P, N=276
Evalsσ
1*1e−8
Approximate Balancing
AP + PAT + BBT = 0 ATQ+QA + CTC = 0
• Sparse Case: Iteratively Solve in Low Rank Factored Form,
P ≈ UkUTk , Q ≈ LkL
Tk
[X,S,Y] = svd(UTk Lk)
Wk = LYkS−1/2k and Vk = UXkS
−1/2k .
Now: PWk ≈ VkSk and QVk ≈WkSk
D.C. Sorensen 23
Balanced Reduction via Projection
Reduced model of order k:
Ak = WTk AVk , Bk = WT
k B, Ck = CVk .
0 = WTk (AP + PAT + BBT )Wk = AkSk + SkA
Tk + BkB
Tk
0 = VTk (ATQ+QA + CTC)Vk = AT
k Sk + SkAk + CTk Ck
Reduced model is balanced and asymptotically stable for every k.
D.C. Sorensen 24
Low Rank Smith = ADI
Convert to Stein Equation:
AP + PAT + BBT = 0 ⇐⇒ P = AµPATµ + BµB
Tµ ,
where
Aµ = (A− µI)(A + µI)−1, Bµ =√
2|µ|(A + µI)−1B.
Solution:
P =∞∑j=0
AjµBµB
Tµ (Aj
µ)T = LLT ,
where L = [Bµ, AµBµ, A2µBµ, . . . ] Factored Form
D.C. Sorensen 25
Multi-Shift (Modified) Low Rank Smith
LR - Smith: Update Factored Form Pm = LmLTm:
(Penzl , Li ,White)
Lm+1 = [AµLm,Bµ]
= [Am+1µ Bµ,Lm]
Multi-Shift LR - Smith: (Gugercin, Antoulas, and S.)Update and Truncate SVDRe-Order and Aggregate Shift ApplicationsMuch Faster and Far Less Storage
B ← AµB;
[V,S,Q] = svd([AµB,Lm]);
Lm+1 ← VkSk ; (σk+1 < tol · σ1)
D.C. Sorensen 26
Approximate Power Method (Hodel)
APU + PATU + BB
TU = 0
APU + PUUTA
TU + BB
TU + P(I−UU
T)A
TU = 0
Thus
APU + PUHT
+ BBTU ≈ 0 where H = U
TAU
Solving
AZ + ZHT
+ BBTU = 0
gives approximation to
Z ≈ PU
Iterate ⇒ Approximate Power Method Zj → US with PU = US
(also see Vasilyev and White 05)
A Parameter Free Synthesis (P ≈ US2UT
)
Step 1: Solve the reduced order Lyapunov equationSolve HP + PHT + BBT = 0.
with H = UkTAUk , B = Uk
TB.
Step 2: (APM step) Solve a projected Sylvester equation
AZ + ZHT + BBT = 0,
Step 3: Modify B
Update B← (I− ZP−1UT )B.
Step 4: (ADI step) Update factorization and basis Uk
Re-scale Z← ZP−1/2.Update (and truncate) [U,S]← svd [US,Z].Uk ← U(:, 1 : k), basis for dominant subspace.
D.C. Sorensen 28
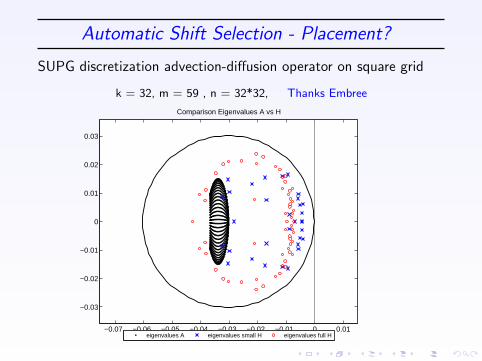
Automatic Shift Selection - Placement?
SUPG discretization advection-diffusion operator on square grid
k = 32, m = 59 , n = 32*32, Thanks Embree
−0.07 −0.06 −0.05 −0.04 −0.03 −0.02 −0.01 0 0.01
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
Comparison Eigenvalues A vs H
eigenvalues A eigenvalues small H eigenvalues full H
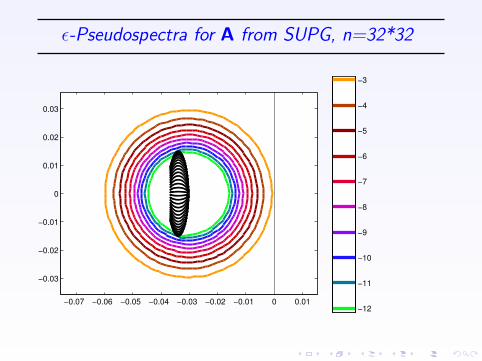
ε-Pseudospectra for A from SUPG, n=32*32
−0.07 −0.06 −0.05 −0.04 −0.03 −0.02 −0.01 0 0.01
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
−12
−11
−10
−9
−8
−7
−6
−5
−4
−3
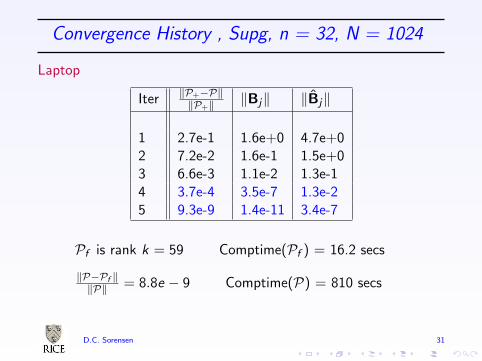
Convergence History , Supg, n = 32, N = 1024
Laptop
Iter ‖P+−P‖‖P+‖ ‖Bj‖ ‖Bj‖
1 2.7e-1 1.6e+0 4.7e+02 7.2e-2 1.6e-1 1.5e+03 6.6e-3 1.1e-2 1.3e-14 3.7e-4 3.5e-7 1.3e-25 9.3e-9 1.4e-11 3.4e-7
Pf is rank k = 59 Comptime(Pf ) = 16.2 secs
‖P−Pf ‖‖P‖ = 8.8e − 9 Comptime(P) = 810 secs
D.C. Sorensen 31
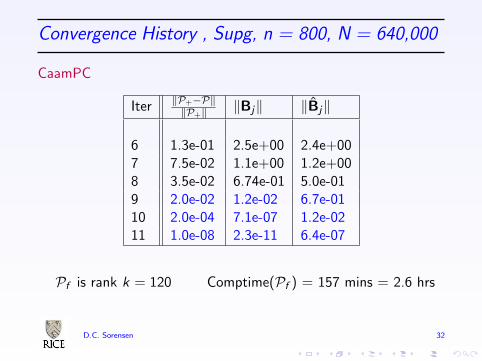
Convergence History , Supg, n = 800, N = 640,000
CaamPC
Iter ‖P+−P‖‖P+‖ ‖Bj‖ ‖Bj‖
6 1.3e-01 2.5e+00 2.4e+007 7.5e-02 1.1e+00 1.2e+008 3.5e-02 6.74e-01 5.0e-019 2.0e-02 1.2e-02 6.7e-0110 2.0e-04 7.1e-07 1.2e-0211 1.0e-08 2.3e-11 6.4e-07
Pf is rank k = 120 Comptime(Pf ) = 157 mins = 2.6 hrs
D.C. Sorensen 32
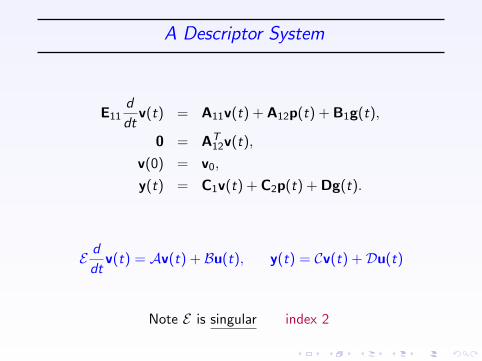
A Descriptor System
E11d
dtv(t) = A11v(t) + A12p(t) + B1g(t),
0 = AT12v(t),
v(0) = v0,
y(t) = C1v(t) + C2p(t) + Dg(t).
E d
dtv(t) = Av(t) + Bu(t), y(t) = Cv(t) +Du(t)
Note E is singular index 2
Notation
Put
E = ΠE11ΠT , A = ΠA11Π
T , B = ΠB1, C = CΠT .
With this notation,
A P E + E P AT + BBT = 0,
AT QE + EQ A + CT C = 0.
where
Π = I− A12(AT12E
−111 A12)
−1AT12E
−111
= ΘlΘTr
ΠT Projector onto Null(AT12)
ADI Derivation Step 1
Begin with
AP(E + µ A
)T= −
[(E− µ A
)PAT + BBT
].
and derive
(E + µ A
)P
(E + µ A
)T=
(E− µ A
)P
(E− µ A
)T−2 Re(µ)BBT .
Problem:(E + µ A
)is Singular

Key Pseudo-Inverse Lemma
Suppose ΘTr E11Θr + µΘT
r A11Θr is invertible.
Then the matrix(E + µ A
)I≡ Θr
(ΘT
r E11Θr + µΘTr A11Θr
)−1ΘT
r
satisfies (E + µ A
)I (E + µ A
)= ΠT
and (E + µ A
) (E + µ A
)I= Π.
Projected Stein Equation
P = AµPA∗µ − 2 Re( µ)BµB
∗µ.
where
Aµ ≡(E + µ A
)I (E− µ A
), and Bµ ≡
(E + µ A
)IB
Solution:
P = −2 Re(µ)
∞∑j=0
AjµBµB
∗µ
(A∗
µ
)j.
Convergent for stable pencil with Real(µ) < 0
Key Implementation Lemma
If M = ΠTM, then the computation
Z =(E + µ A
)I (E− µ A
)M
may be accomplished with the following steps.
1. Put F = (E11 − µA11)M.
2. Solve (E11 + µA11 A12
AT12 0
) (ZΛ
)=
(F0
).
Note that Z satisfies Z = ΠTZSimilar result holds for computing Bµ

Algorithm:Single Shift ADI
1. Solve
(E11 + µA11 A12
AT12 0
) (ZΛ
)=
(B0
);
2. U = Z;
3. while ( ’not converged’)
3.1 Z← (E11 − µA11)Z;
3.2 Solve (in place)
(E11 + µA11 A12
AT12 0
) (ZΛ
)=
(Z0
);
3.3 U← [U,Z] ;
end
4. U←√
2| Re(µ)|U.
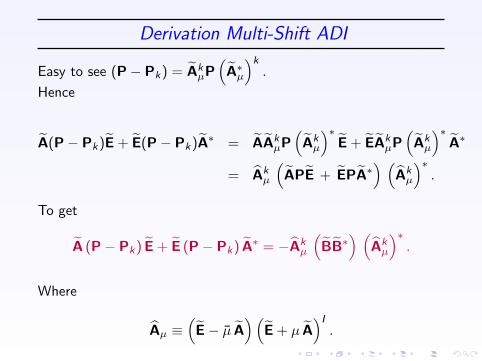
Derivation Multi-Shift ADI
Easy to see (P− Pk) = AkµP
(A∗
µ
)k.
Hence
A(P− Pk)E + E(P− Pk)A∗ = AAkµP
(Ak
µ
)∗E + EAk
µP(Ak
µ
)∗A∗
= Akµ
(APE + EPA∗
) (Ak
µ
)∗.
To get
A (P− Pk) E + E (P− Pk) A∗ = −Akµ
(BB∗
) (Ak
µ
)∗.
Where
Aµ ≡(E− µ A
) (E + µ A
)I.
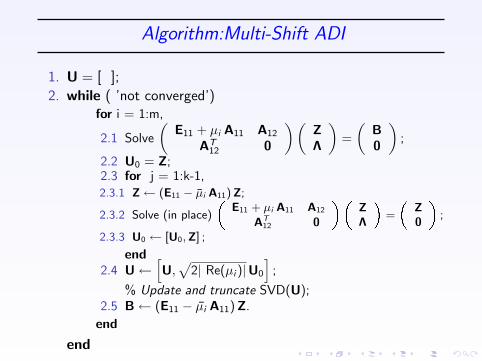
Algorithm:Multi-Shift ADI
1. U = [ ];
2. while ( ’not converged’)for i = 1:m,
2.1 Solve
(E11 + µi A11 A12
AT12 0
) (ZΛ
)=
(B0
);
2.2 U0 = Z;2.3 for j = 1:k-1,2.3.1 Z← (E11 − µi A11)Z;
2.3.2 Solve (in place)
E11 + µi A11 A12
AT12 0
ZΛ
=
Z0
;
2.3.3 U0 ← [U0,Z] ;
end2.4 U←
[U,
√2| Re(µi )|U0
];
% Update and truncate SVD(U);2.5 B← (E11 − µi A11)Z.
end
end
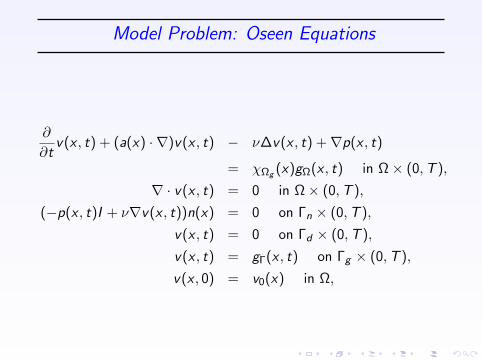
Model Problem: Oseen Equations
∂
∂tv(x , t) + (a(x) · ∇)v(x , t) − ν∆v(x , t) +∇p(x , t)
= χΩg (x)gΩ(x , t) in Ω× (0,T ),
∇ · v(x , t) = 0 in Ω× (0,T ),
(−p(x , t)I + ν∇v(x , t))n(x) = 0 on Γn × (0,T ),
v(x , t) = 0 on Γd × (0,T ),
v(x , t) = gΓ(x , t) on Γg × (0,T ),
v(x , 0) = v0(x) in Ω,

Channel Geometry and Grid
0 1 2 3 4 5 6 7 80
0.5
1
Figure: The channel geometry and coarse grid
EXAMPLE 1.
y(t) =
∫Ωobs
−∂x2v1(x , t) + ∂x1v2(x , t)dx
over the subdomain Ωobs = (1, 3)× (0, 1/2).
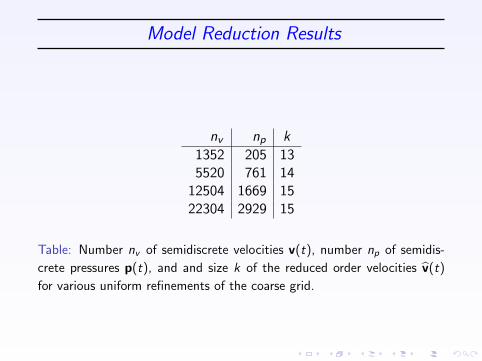
Model Reduction Results
nv np k
1352 205 135520 761 14
12504 1669 1522304 2929 15
Table: Number nv of semidiscrete velocities v(t), number np of semidis-
crete pressures p(t), and and size k of the reduced order velocities v(t)
for various uniform refinements of the coarse grid.
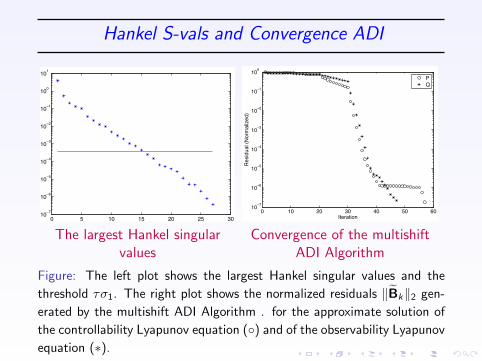
Hankel S-vals and Convergence ADI
0 5 10 15 20 25 3010
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
The largest Hankel singularvalues
0 10 20 30 40 50 6010
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Iteration
Res
idua
l (N
orm
aliz
ed)
PQ
Convergence of the multishiftADI Algorithm
Figure: The left plot shows the largest Hankel singular values and the
threshold τσ1. The right plot shows the normalized residuals ‖Bk‖2 gen-
erated by the multishift ADI Algorithm . for the approximate solution of
the controllability Lyapunov equation () and of the observability Lyapunov
equation (∗).
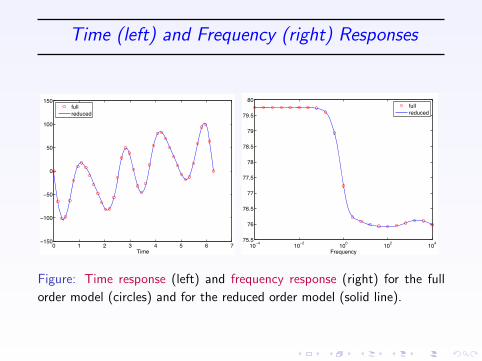
Time (left) and Frequency (right) Responses
0 1 2 3 4 5 6 7−150
−100
−50
0
50
100
150
Time
fullreduced
10−4
10−2
100
102
104
75.5
76
76.5
77
77.5
78
78.5
79
79.5
80
Frequency
fullreduced
Figure: Time response (left) and frequency response (right) for the full
order model (circles) and for the reduced order model (solid line).
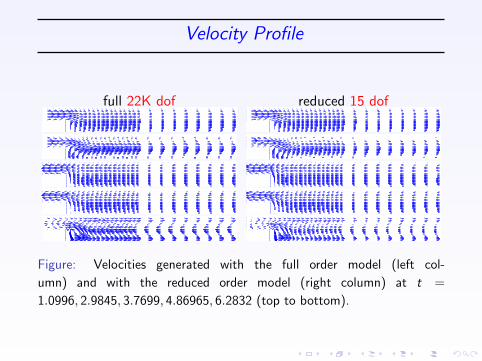
Velocity Profile
full 22K dof reduced 15 dof
Figure: Velocities generated with the full order model (left col-
umn) and with the reduced order model (right column) at t =
1.0996, 2.9845, 3.7699, 4.86965, 6.2832 (top to bottom).

Domain Decomposition Model Reduction
Systems with Local Nonlinearities
Linear Model in Large Domain Ω1
coupled to
Non-Linear Model in Small Domain Ω2
Linear Model provides B.C.’s to Non-Linear Model
with R. Glowinski
D.C. Sorensen 48
Simple 1-D Model Problem
Ω1 ∪ Ω2 ∪ Ω3
Ω1 = (−10,−1), Ω2 = (−1, 1), Ω3 = (1, 10)
Ω1 : Convection-DiffusionΩ2 : Burgers EquationΩ3 : Convection-Diffusion
D.C. Sorensen 49
Equations
ρk∂yk
∂t(x , t)− µk
∂2yk
∂x2(x , t) = Sk(x , t), (x , t) ∈ Ωk × (0,T ),
yk(x , 0) = yk0(x), x ∈ Ωk , k = 1, 3,
∂y1
∂x(−10, t) = 0,
∂y3
∂x(10, t) = 0 t ∈ (0,T ),
ρ2∂y2
∂t(x , t)− µ2
∂2y2
∂x2+ y2
∂y2
∂x(x , t) = 0, (x , t) ∈ Ω2 × (0,T ),
y2(x , 0) = y20(x), x ∈ Ω2,
with appropriate interface conditions
Semi-Discrete Equations
MII1
d
dtyI1 + AII
1 yI1 + MIΓ
1
d
dtyΓ12 + AIΓ
1 yΓ12 = BI
1u1,
MII2
d
dtyI2 + AII
2 yI2 + MIΓ
2
d
dtyΓ + AIΓ
2 yΓ + NI (yI2, y
Γ) = 0,
MII3
d
dtyI3 + AII
3 yI3 + MIΓ
3
d
dtyΓ23 + AIΓ
3 yΓ23 = BI
3u3.
D.C. Sorensen 51

Equations to Reduce
Inputs to System 1: MIΓ1
ddt y
Γ12, AIΓ
1 yΓ12 and BI
1u1
Outputs of System 1: CΓI1 yI
1, MΓI1
ddt y
I1 + AΓI
1 yI1
Apply Model Reduction to
MII1
d
dtyI1 = −AII
1 yI1 − AIΓ
1 yΓ12 + BI
1u1
zI1 = CI
1yI1, zΓ
1 = AΓI1 yI
1.
D.C. Sorensen 52
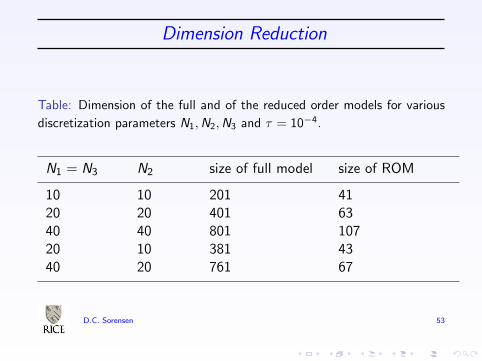
Dimension Reduction
Table: Dimension of the full and of the reduced order models for various
discretization parameters N1,N2,N3 and τ = 10−4.
N1 = N3 N2 size of full model size of ROM
10 10 201 4120 20 401 6340 40 801 10720 10 381 4340 20 761 67
D.C. Sorensen 53
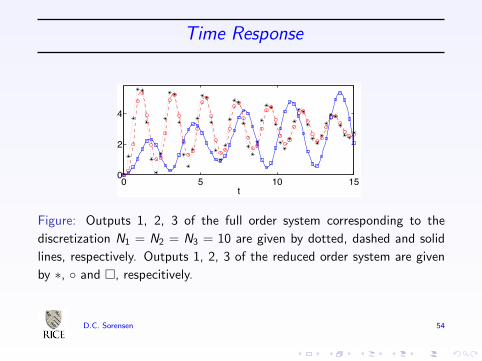
Time Response
0 5 10 150
2
4
t
Figure: Outputs 1, 2, 3 of the full order system corresponding to the
discretization N1 = N2 = N3 = 10 are given by dotted, dashed and solid
lines, respectively. Outputs 1, 2, 3 of the reduced order system are given
by ∗, and , respecitively.
D.C. Sorensen 54

State Approximation
!10 !5 0 5 10
0
5
10
15!5
0
5
10
x
t!10 !5 0 5 10
0
5
10
15!0.02
0
0.02
0.04
x
t
Figure: Solution of the reduced order discretized PDE (left) and error
between the solution of the discretized PDE and the reduced order system
(right) for discretization N1 = N2 = N3 = 10.
D.C. Sorensen 55
Neuron Modeling
Balanced Truncation on aCompartmental Neuron Model
Steve Cox
Tony Kellems
Undergrads Nan Xiao and Derrick Roos
Quasi-active integrate and fire model.Complex model dimension 6000Faithfully approximated with 10-20 variable ROM
D.C. Sorensen 56
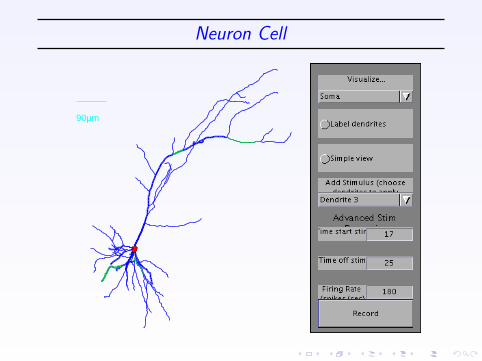
Neuron Cell
90µm
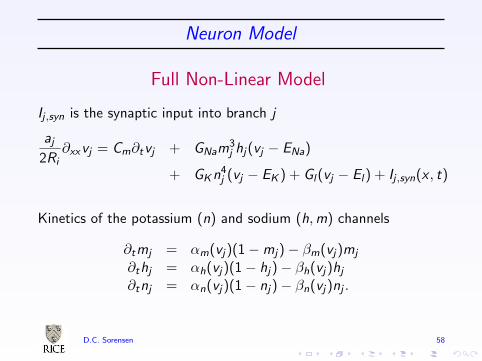
Neuron Model
Full Non-Linear Model
Ij ,syn is the synaptic input into branch j
aj
2Ri∂xxvj = Cm∂tvj + GNam
3j hj(vj − ENa)
+ GKn4j (vj − EK ) + Gl(vj − El) + Ij ,syn(x , t)
Kinetics of the potassium (n) and sodium (h,m) channels
∂tmj = αm(vj)(1−mj)− βm(vj)mj
∂thj = αh(vj)(1− hj)− βh(vj)hj
∂tnj = αn(vj)(1− nj)− βn(vj)nj .
D.C. Sorensen 58
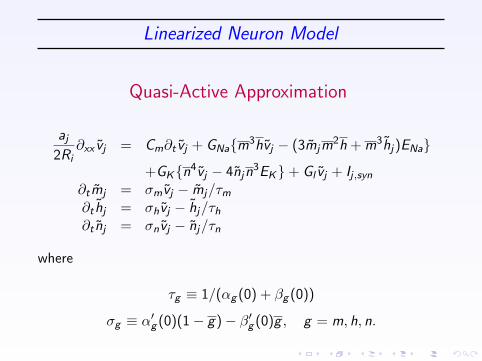
Linearized Neuron Model
Quasi-Active Approximation
aj
2Ri∂xx vj = Cm∂t vj + GNam3hvj − (3mjm
2h + m3hj)ENa
+GKn4vj − 4njn3EK+ Gl vj + Ij ,syn
∂tmj = σmvj − mj/τm
∂t hj = σhvj − hj/τh
∂t nj = σnvj − nj/τn
where
τg ≡ 1/(αg (0) + βg (0))
σg ≡ α′g (0)(1− g)− β′g (0)g , g = m, h, n.
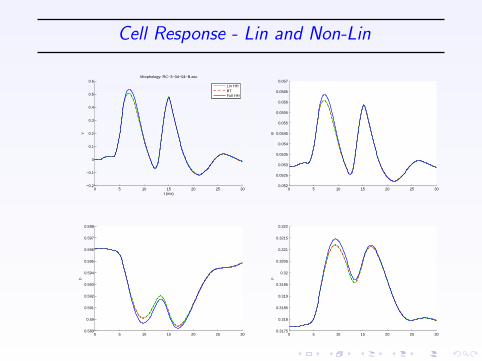
Cell Response - Lin and Non-Lin
0 5 10 15 20 25 30−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6v
Morphology: RC−3−04−04−B.asc
t (ms)
0 5 10 15 20 25 300.052
0.0525
0.053
0.0535
0.054
0.0545
0.055
0.0555
0.056
0.0565
0.057
m
0 5 10 15 20 25 300.589
0.59
0.591
0.592
0.593
0.594
0.595
0.596
0.597
0.598
h
0 5 10 15 20 25 300.3175
0.318
0.3185
0.319
0.3195
0.32
0.3205
0.321
0.3215
0.322
n
Lin HHBTFull HH
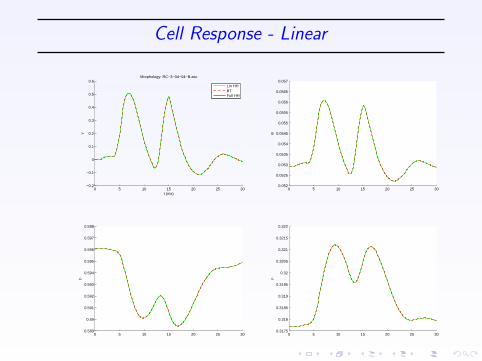
Cell Response - Linear
0 5 10 15 20 25 30−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6v
Morphology: RC−3−04−04−B.asc
t (ms)
0 5 10 15 20 25 300.052
0.0525
0.053
0.0535
0.054
0.0545
0.055
0.0555
0.056
0.0565
0.057
m
0 5 10 15 20 25 300.589
0.59
0.591
0.592
0.593
0.594
0.595
0.596
0.597
0.598
h
0 5 10 15 20 25 300.3175
0.318
0.3185
0.319
0.3195
0.32
0.3205
0.321
0.3215
0.322
n
Lin HHBTFull HH

Cell Response - Near Threshold
0 5 10 15 20 25 30−1
−0.5
0
0.5
1
1.5
2v
Morphology: RC−3−04−04−B.asc
t (ms)
0 5 10 15 20 25 300.045
0.05
0.055
0.06
0.065
0.07
m
0 5 10 15 20 25 30
0.565
0.57
0.575
0.58
0.585
0.59
0.595
0.6
0.605
h
0 5 10 15 20 25 300.315
0.32
0.325
0.33
0.335
0.34
n
Lin HHBTFull HH
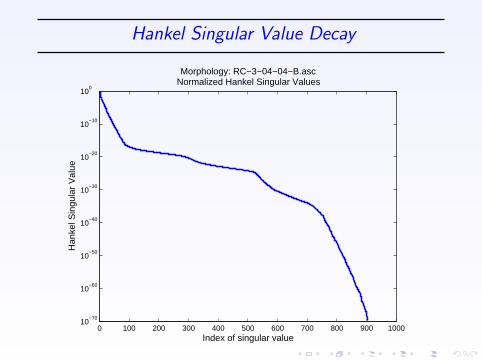
Hankel Singular Value Decay
0 100 200 300 400 500 600 700 800 900 100010
−70
10−60
10−50
10−40
10−30
10−20
10−10
100
Index of singular value
Han
kel S
ingu
lar
Val
ueMorphology: RC−3−04−04−B.asc
Normalized Hankel Singular Values
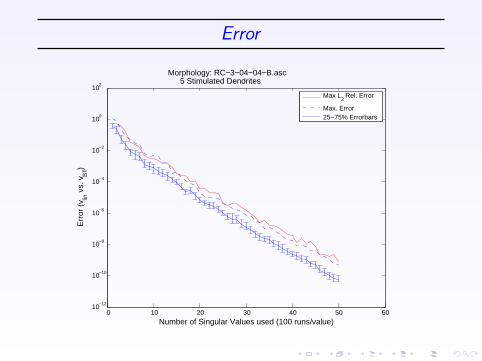
Error
0 10 20 30 40 50 6010−12
10−10
10−8
10−6
10−4
10−2
100
102
Number of Singular Values used (100 runs/value)
Err
or (
v lin v
s. v
BT)
Morphology: RC−3−04−04−B.asc 5 Stimulated Dendrites
Max L
2 Rel. Error
Max. Error25−75% Errorbars
Neural ROM Results
I Interesting example of many-input , single-output system
I Simulation time single cell 14 sec Full vs .01 sec Reduced
I Ultimate goal is to simulate a few-Million neuron systemover a minute of brain-time
I Currently limited to a 10K neuron systemover a few brain-seconds
I Parallel computing required
D.C. Sorensen 65
Summary
CAAM TR07-02, M. Heinkenschloss, D. C. S., & K. Sun
CAAM TR07-14, K. Sun, R. Glowinski, M. Heinkenschloss, DCS.
Gramian Based Model Reduction: Balanced Reduction
Solving Large Lyapunov Equations: Approximate Balancing1M vars now possibleParameter Free
Balanced Reduction of Oseen Eqns: Extension toDescriptor System
Multi-Shift ADI Without Explicit Projectors:Only need Saddle Point Solver Sparse Direct or Iterative
Domain Decomposition - Systems with Local Nonlinearities
Neural Modeling - Single Cell ROM ⇒ Many Interactions

















