29
Computational Motor Control Summer School 01: Kinematics, Dynamics, and Coordinate transformation. Hirokazu Tanaka School of Information Science Japan Institute of Science and Technology
| Date post: | 11-Feb-2017 |
| Category: |
Science |
| Upload: | hirokazutanaka |
| View: | 379 times |
| Download: | 3 times |

Computational Motor Control Summer School
01: Kinematics, Dynamics, and Coordinate transformation.
Hirokazu Tanaka
School of Information Science
Japan Institute of Science and Technology

Kinematics, dynamics and coordinate transformations.
In this lecture, you will learn…
• Kinematics
• Redundancy (ill-posed) problem
• Dynamics
• Equations of motion: Euler-Lagrange & Newton-Euler methods
• Neurophysiology: Gain fields in parietal cortex
• Coordinate transformation in the brain
• Human psychophysics experiments
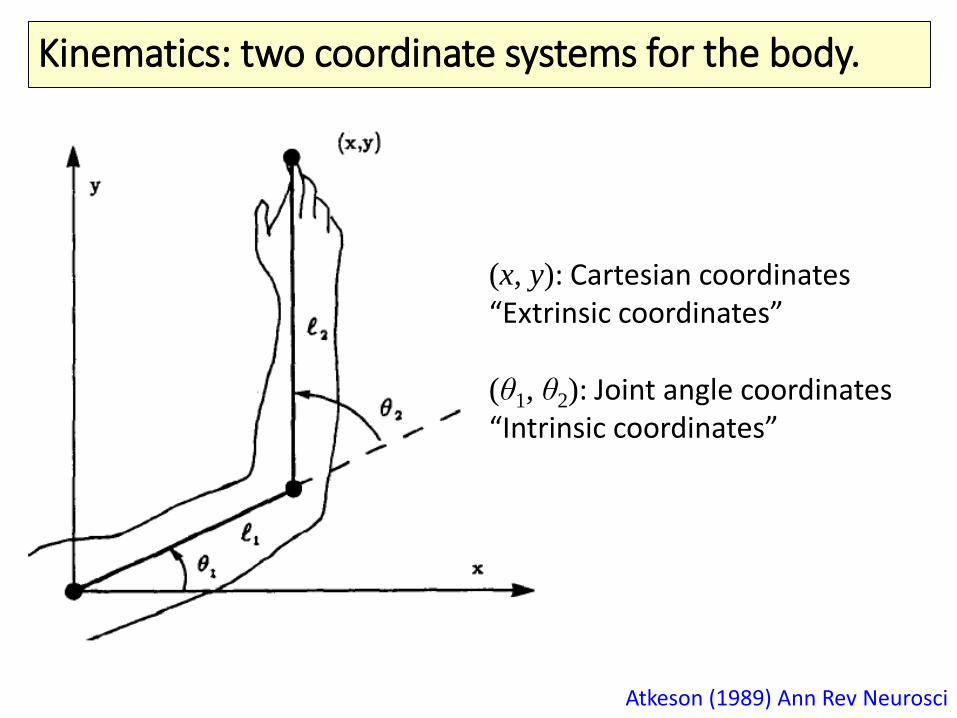
Kinematics: two coordinate systems for the body.
Atkeson (1989) Ann Rev Neurosci
(x, y): Cartesian coordinates“Extrinsic coordinates”
(θ1, θ2): Joint angle coordinates“Intrinsic coordinates”

1.1. Forward kinematics from joint angles to Cartesian positions.
1 1 2 1 2
1 1 2 1 2
cos cos
sin sin
x l l
y l l
Atkeson (1989) Ann Rev Neurosci
Forward kinematics= Computation of extrinsic coordinates from intrinsic coordinates

1.1. Inverse kinematics from Cartesian positions to joint angles.
2 2 2 2
1 21
1 2
2 22
1 1 2
arccos2
sinarcta arctann
cos
y
l
x l l
l
l l
l
y
x
Atkeson (1989) Ann Rev Neurosci
Inverse kinematics= Computation of intrinsic coordinates from extrinsic coordinates

Ill-posedness: many-to-one mappings from joints to positions.
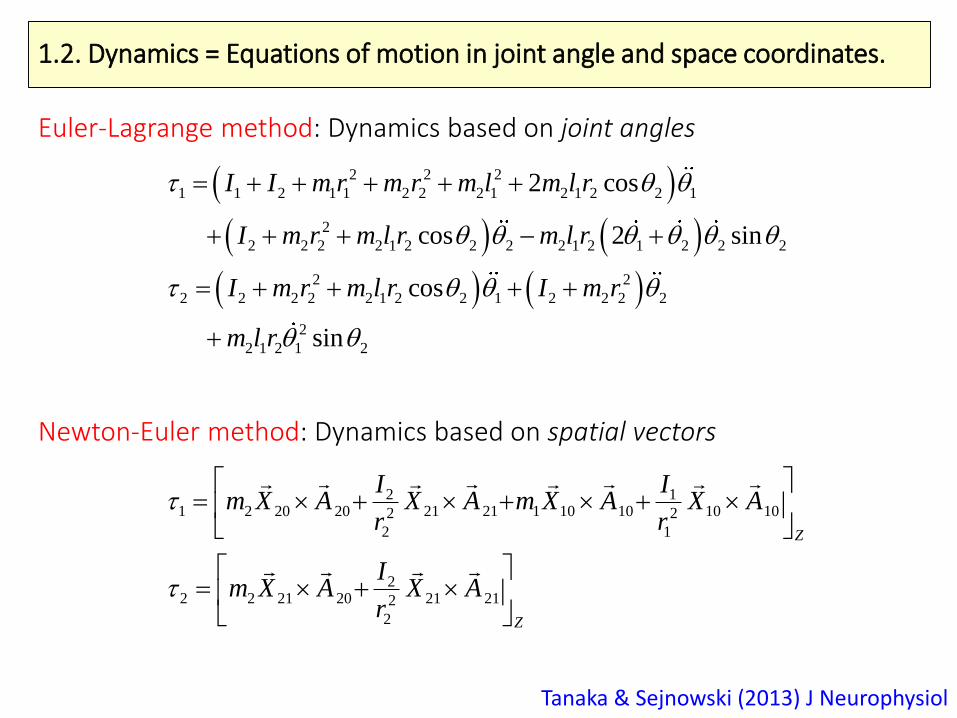
1.2. Dynamics = Equations of motion in joint angle and space coordinates.
2 2 2
1 1 2 1 1 2 2 2 1 2 1 2 2 1
2
2 2 2 2 1 2 2 2 2 1 2 1 2 2 2
2 2
2 2 2 2 2 1 2 2 1 2 2 2 2
2
2 1 2 1 2
2 cos
cos 2 sin
cos
sin
I I m r m r m l m l r
I m r m l r m l r
I m r m l r I m r
m l r
2 11 2 20 20 21 21 1 10 10 10 102 2
2 1
22 2 21 20 21 212
2
Z
Z
I Im X A X A m X A X A
r r
Im X A X A
r
Euler-Lagrange method: Dynamics based on joint angles
Newton-Euler method: Dynamics based on spatial vectors
Tanaka & Sejnowski (2013) J Neurophysiol
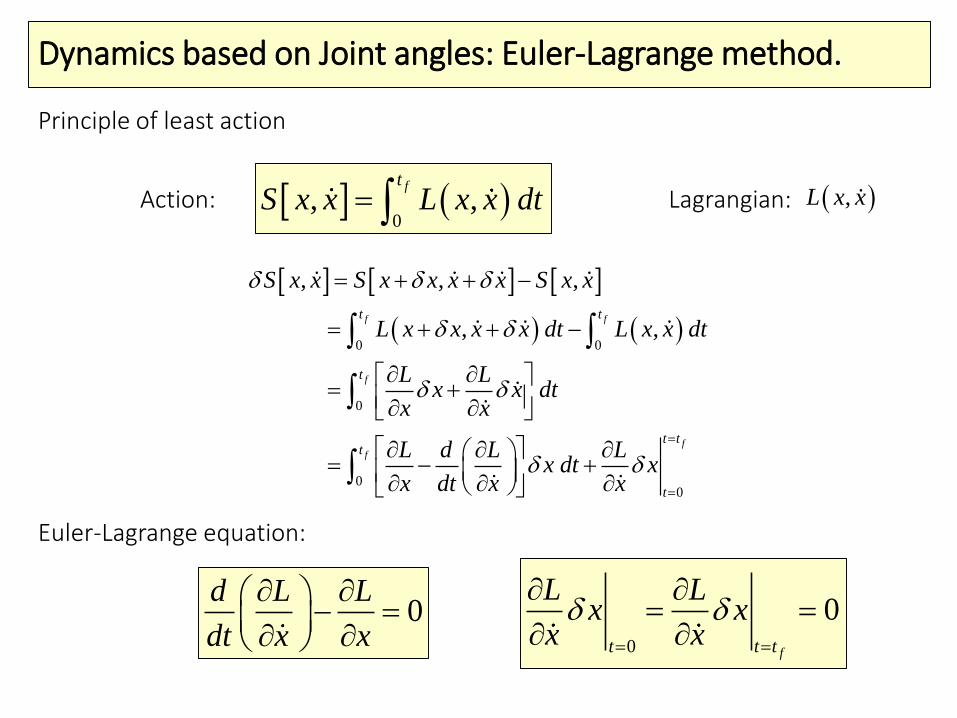
Dynamics based on Joint angles: Euler-Lagrange method.
0
, ,ft
xS x x L x dt
0
0 0
0
0
, ,
, , ,
f
f f
f
f
t t
t
t t
t
t
L x dt L x dt
L
S x x S x x x x S x x
x
Ldt
x x
L d L Ldt
x dt
x x x
x
x
x
x xx
0d L L
dt x x
0
0
ft t t
L L
xx
xx
Principle of least action
Action: ,L x xLagrangian:
Euler-Lagrange equation:

Dynamics based on Joint angles: Euler-Lagrange method.
0 1,2ii
d L Li
dt
2
2 22 2
1 1 1
1 1,
2 2
i
i i i i i i j
i i j
L m X Y I
1 1 1
1 1 1
cos
sin
X r
Y r
2 1 1 2 1 2
2 1 1 2 1 2
cos cos
sin sin
X l r
Y l r
2 2
1 1 1 1 1
2 2
1 1 2 1 2 1 1 2 1 2
22
1
2
21 21
1, cos sin
2
1cos cos sin sin
2
1 1
2 2
i i
d dL m r r
dt dt
d dm l r l r
dt dt
I I
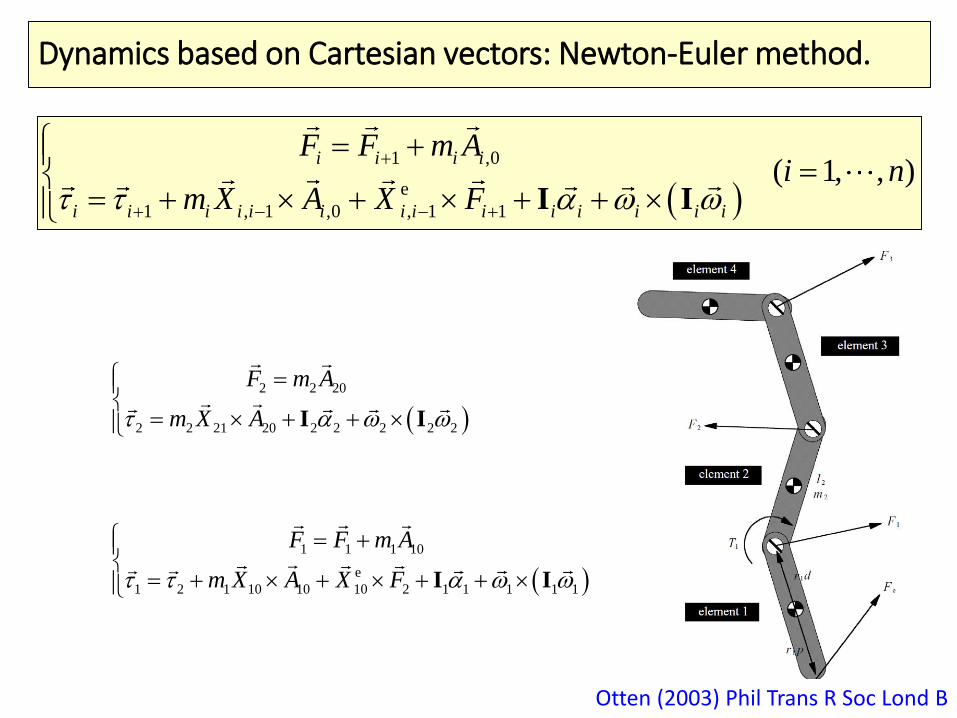
Dynamics based on Cartesian vectors: Newton-Euler method.
1 ,0
e
1 , 1 ,0 , 1 1
( 1, , )i i i i
i i i i i i i i i i i i i i
F F m Ai n
m X A X F
I I
2 2 20
2 2 21 20 2 2 2 2 2
F m A
m X A
I I
1 1 1 10
e
1 2 1 10 10 10 2 1 1 1 1 1
F F m A
m X A X F
I I
Otten (2003) Phil Trans R Soc Lond B

Dynamics based on Cartesian vectors: Newton-Euler method.
10 10 10 10 10 101 1 10 10 1 12 2 2
1 1 1
21 21 21 21 21 212 20 20 2 22 2 2
2 2 2
X A X V X Vm X A
r r r
X A X V X Vm X A
r r r
I I
I I
21 21 21 21 21 212 2 21 20 2 22 2 2
2 2 2
X A X V X Vm X A
r r r
I I
Tanaka & Sejnowski (2013) J Neurophysiol
Equations of motion in general 3D movements:

Dynamics based on Cartesian vectors: Newton-Euler method.
10 10 21 211 1 10 10 1 2 20 20 22 2
1 2 Z
X A X Am X A I m X A I
r r
21 212 2 21 20 2 2
2 Z
X Am X A I
r
Tanaka & Sejnowski (2013) J Neurophysiol
Equations of motion in 2D planar movements:

Coordinate transformation problem in the brain.
Kalaska & Crammond (1992) Science

Neural pathway for visually guided reaching movements.
Haggard (2008) Nature Rev Neurosci
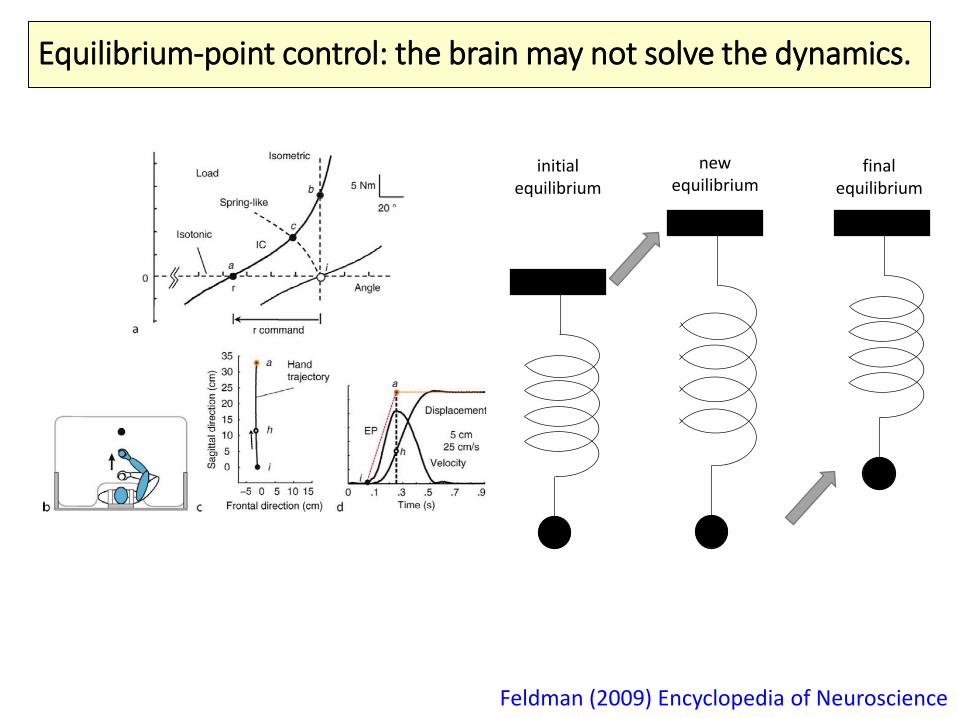
Equilibrium-point control: the brain may not solve the dynamics.
Feldman (2009) Encyclopedia of Neuroscience
initial equilibrium
new equilibrium
final equilibrium

Joint stiffness indicates that the brain “solves” the arm dynamics.
Gomi & Kawato (1996) Science

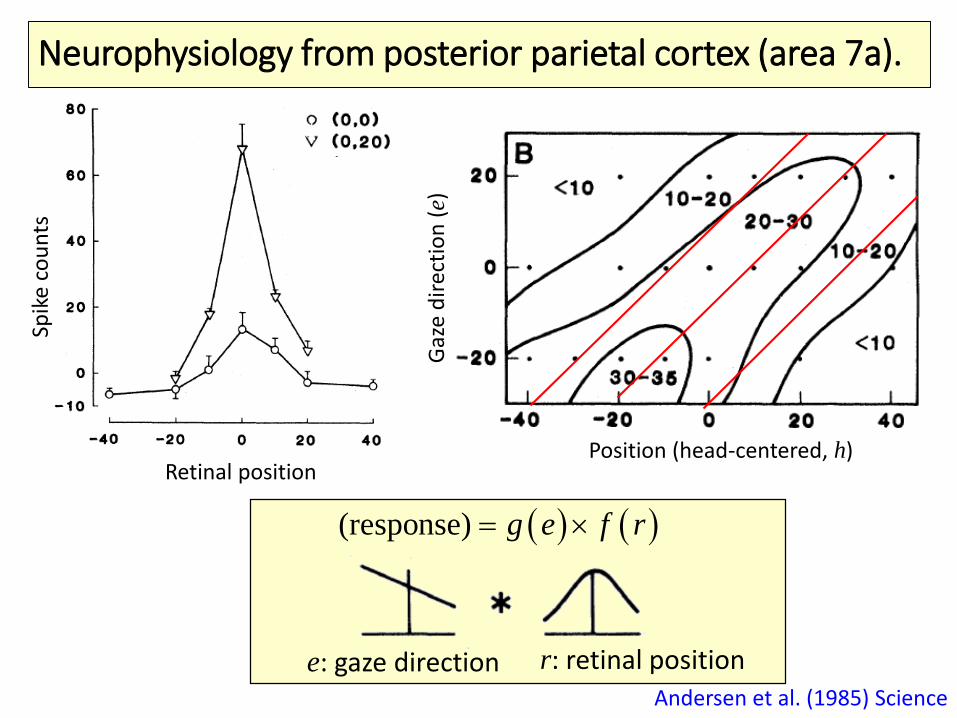
Neurophysiology from posterior parietal cortex (area 7a).
Andersen et al. (1985) Science
Neurophysiology from posterior parietal cortex (area 7a).
Andersen et al. (1985) Science
Retinal position
Spik
e co
un
ts
Position (head-centered, h)G
aze
dir
ecti
on
(e)
(response) g e f r
e: gaze direction r: retinal position

Gain fields as an intermediate step for coordinate transformation?
total activity
background activity (due to eye position)
visually evoked activity Zipser & Andersen (1988) Nature
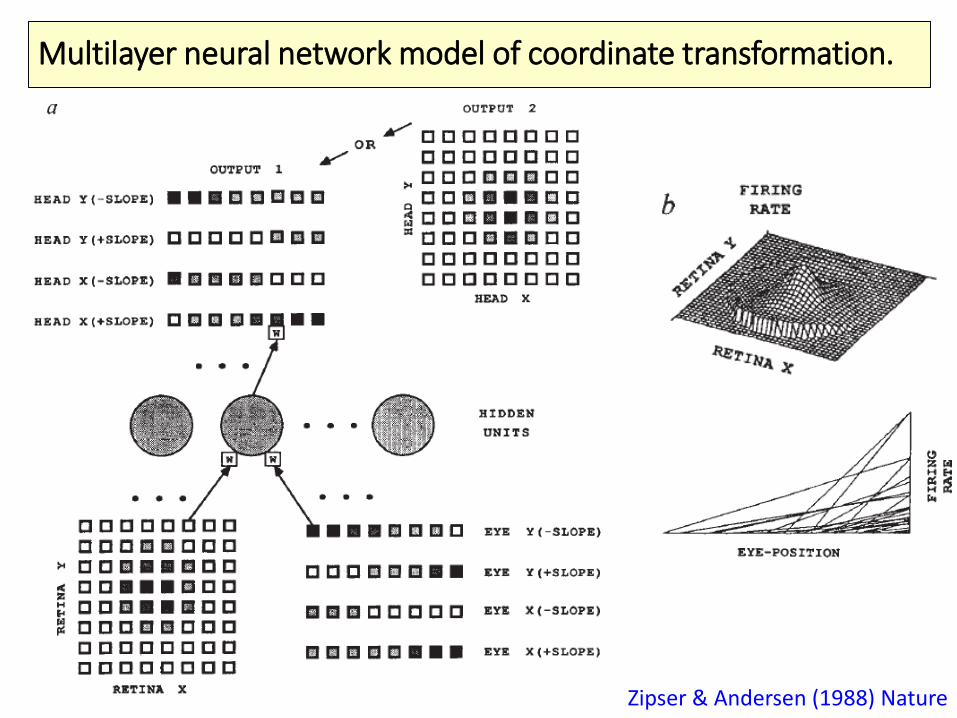
Multilayer neural network model of coordinate transformation.
Zipser & Andersen (1988) Nature
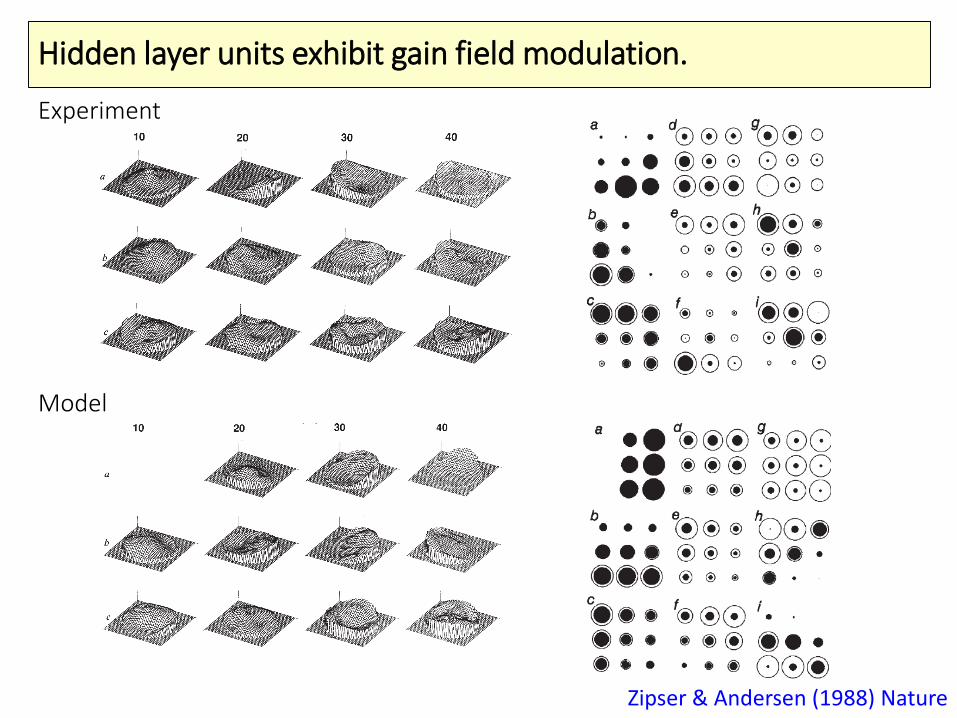
Hidden layer units exhibit gain field modulation.
Zipser & Andersen (1988) Nature
Experiment
Model

How gain fields work for coordinate transformation.
Kakei et al. (1999) Science; Kakei et al. (2003) Neurosci Res
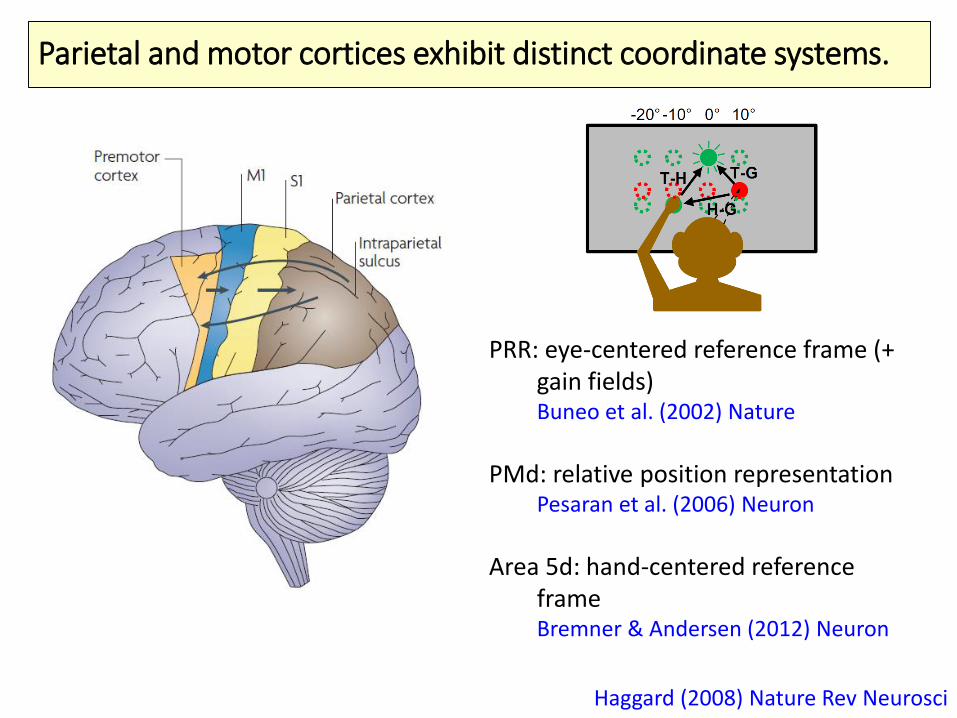
Parietal and motor cortices exhibit distinct coordinate systems.
Haggard (2008) Nature Rev Neurosci
PRR: eye-centered reference frame (+ gain fields)Buneo et al. (2002) Nature
PMd: relative position representationPesaran et al. (2006) Neuron
Area 5d: hand-centered reference frameBremner & Andersen (2012) Neuron
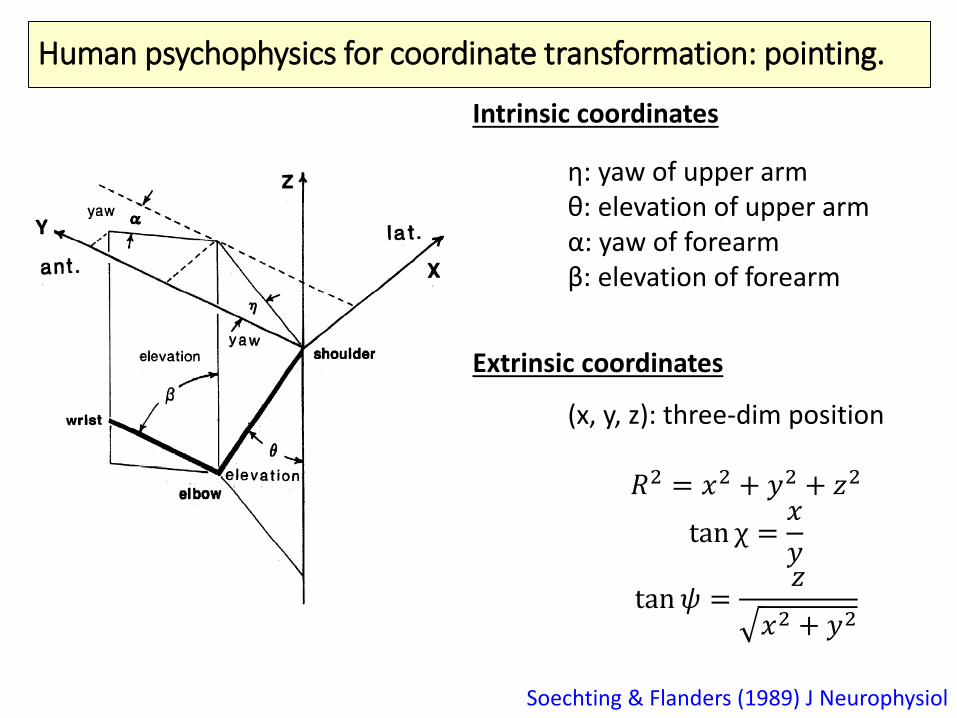
Human psychophysics for coordinate transformation: pointing.
Soechting & Flanders (1989) J Neurophysiol
Intrinsic coordinates
η: yaw of upper arm θ: elevation of upper armα: yaw of forearmβ: elevation of forearm
Extrinsic coordinates
(x, y, z): three-dim position
𝑅2 = 𝑥2 + 𝑦2 + 𝑧2
tan χ =𝑥
𝑦
tan𝜓 =𝑧
𝑥2 + 𝑦2

Extrinsic-intrinsic transformation is linearly approximated.
Soechting & Flanders (1989) J Neurophysiol
Reaching toward remembered target in dark (inaccurate)
Reaching toward visible target in dark (accurate)
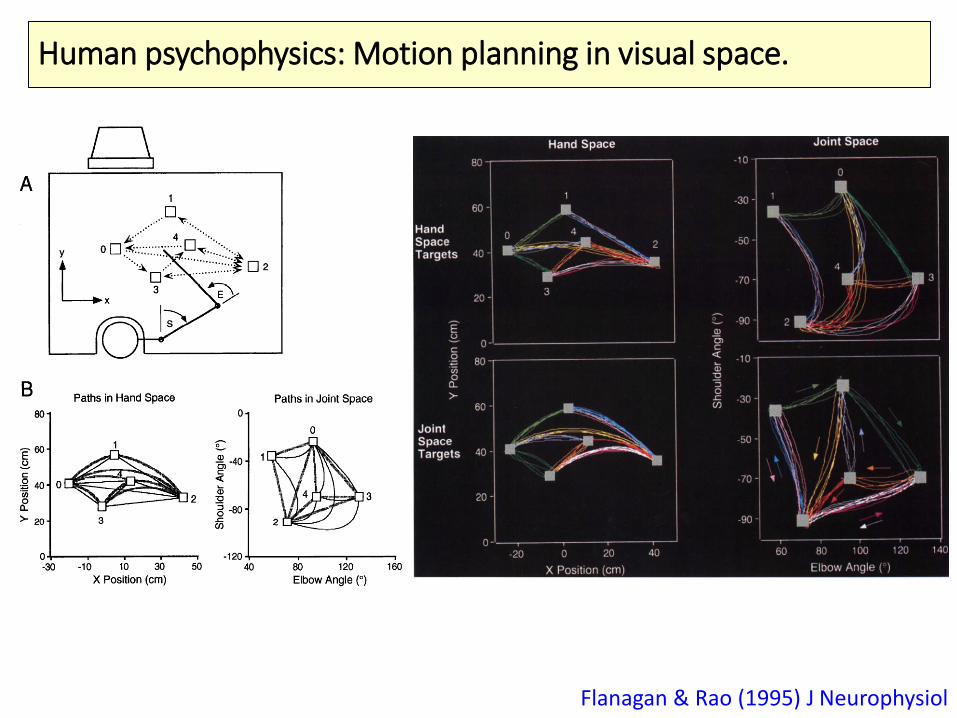
Human psychophysics: Motion planning in visual space.
Flanagan & Rao (1995) J Neurophysiol
Summary
• Movements (kinematics) and equations of motion (dynamics) are described either in external coordinates (i.e., external position) or in internal coordinates (i.e., joint coordinates).
• Mechanisms of coordinate transformation have been examined in human psychophysics.
• Movement planning appears to be processed in visual coordinates.
• Gain fields are the neural mechanisms for coordinate transformations.

References
• Atkeson, C. G. (1989). Learning arm kinematics and dynamics. Annual Review of Neuroscience, 12(1), 157-183.
• Hollerbach, J. M., & Flash, T. (1982). Dynamic interactions between limb segments during planar arm movement. Biological cybernetics, 44(1), 67-77.
• Morasso, P., Casadio, M., Mohan, V., Rea, F., & Zenzeri, J. (2015). Revisiting the body-schema concept in the context of whole-body postural-focal dynamics. Frontiers in Human Neuroscience, 9.
• Tanaka, H., & Sejnowski, T. J. (2013). Computing reaching dynamics in motor cortex with Cartesian spatial coordinates. Journal of neurophysiology, 109(4), 1182-1201.
• Andersen, R. A., Essick, G. K., & Siegel, R. M. (1985). Encoding of spatial location by posterior parietal neurons. Science, 230(4724), 456-458.
• Zipser, D., & Andersen, R. A. (1988). A back-propagation programmed network that simulates response properties of a subset of posterior parietal neurons. Nature, 331(6158), 679-684.
• Chang, S. W., Papadimitriou, C., & Snyder, L. H. (2009). Using a compound gain field to compute a reach plan. Neuron, 64(5), 744-755.
• Soechting, J. F., & Flanders, M. (1989). Sensorimotor representations for pointing to targets in three-dimensional space. Journal of Neurophysiology, 62(2), 582-594.
• Flanagan, J. R., & Rao, A. K. (1995). Trajectory adaptation to a nonlinear visuomotor transformation: evidence of motion planning in visually perceived space. Journal of Neurophysiology, 74(5), 2174-2178.
• Andersen, R. A., Snyder, L. H., Bradley, D. C., & Xing, J. (1997). Multimodal representation of space in the posterior parietal cortex and its use in planning movements. Annual Review of Neuroscience, 20(1), 303-330.
• Batista, A. P., Buneo, C. A., Snyder, L. H., & Andersen, R. A. (1999). Reach plans in eye-centered coordinates. Science, 285(5425), 257-260.
• Graziano, M. S., Yap, G. S., & Gross, C. G. (1994). Coding of visual space by premotor neurons. SCIENCE-NEW YORK THEN WASHINGTON-, 1054-1054.
• Graziano, M. S., & Gross, C. G. (1998). Spatial maps for the control of movement. Current Opinion in Neurobiology, 8(2), 195-201.
• Buneo, C. A., Jarvis, M. R., Batista, A. P., & Andersen, R. A. (2002). Direct visuomotor transformations for reaching. Nature, 416(6881), 632-636.
Exercise
1. Derive the EOMs of two-link arm model using Joint angle representation (i.e., Euler-Lagrange method).
2. Confirm that the EOMs derived in the Newton-Euler method equals to the EOMs derived in the Euler-Lagrange method.

















