94
Concurrent Programming I Anna Lina Ruscelli – Scuola Superiore Sant’ Anna
Concurrent Programming I
Anna Lina Ruscelli – Scuola Superiore Sant’ Anna
Contact info Email [email protected]
RTOS course web pagehttp://retis.sssup.it/~marko/rtos.html
RTOS course mailing [email protected]
Many course slides and other material are courtesy of Prof. Giuseppe Lipari Ing. Paolo Gai
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
2
Reference material PDF notes and slides (available on the web page) P.Ancilotti e M.Boari, Principi e tecniche di
programmazione concorrente, Utet libreria, 1987 (In biblioteca, SOLO pagine 67-107).
Paolo Ancilotti, Maurelio Boari, Anna Ciampolini e Giuseppe Lipari, Sistemi Operativi, Mc-Graw Hill, June 2004
Linux man pages (as a reference for POSIX programming).
Notes on concurrent programming in UNIX systems. Other reference books are available on the web
page
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
3

Outline
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
4
Introduction to concurrency Model of concurrency: shared memory Critical Sections Synchronization
Semaphores
The need of Concurrency There are many reasons for concurrency functional performance expressive power
Functional many users may be connected to the same system at the
same time each user can have its own processes that execute concurrently
with the processes of the other users perform many operations concurrently
for example, listen to the music, write with a word processor, burn a CD, etc...
they are all different and independent activities they can be done at the same time
5 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
The need of Concurrency (2) Performance take advantage of blocking time
while some thread waits for a blocking condition, anotherthread performs another operation
parallelism in multi-processor machines if we have a multi-processor machine, independent activities
can be carried out on different processors at the same time
Expressive power many control applications are inherently concurrent concurrency support helps in expressing concurrency,
making application development simpler
6 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli

Concurrency model (theoretical) A system is a set of concurrent activities they can be processes or threads
They interact in two ways they access the hardware resources (processor, disk,
memory, etc.) they exchange data
These activities compete for the resources and/orcooperate for some common objective
7 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Resource A resource can be a HW resource like a I/O device a SW resource, i.e. a data structure
in both cases, access to a resource must be regulated toavoid interference
example 1 if two processes want to print on the same printer, their access
must be sequentialized, otherwise the two printing could beintermingled!
example 2 if two threads access the same data structure, the operation on
the data must be sequentialised otherwise the data could beinconsistent!
8 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli

Interaction model Activities can interact according to two fundamental
models shared memory All activities access the same memory space
message passing All activities communicate each other by sending
messages through OS primitives we will analyze both models in the following slides
9 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Cooperative vs. CompetitiveThe interaction between concurrent activities (threads
or processes) can be classified into: competitive concurrency different activities compete for the resources one activity does not know anything about the other ones the OS must manage the resources so to
avoid conflicts be fair
cooperative concurrency many activities cooperate to perform an operation every activity knows about the others they must synchronize on particular events
interference
10 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
CompetitionCooperative and competitive activities need different
models of execution and synchronization competing activities need to be “protected” from each
other separate memory spaces
the allocation of the resource and the synchronization must be centralized competitive activities request for services to a central manager
(the OS or some dedicated process) which allocates the resources in a fair way
Client/Server model communication is usually done through messages
the process model of execution is the best one
11 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
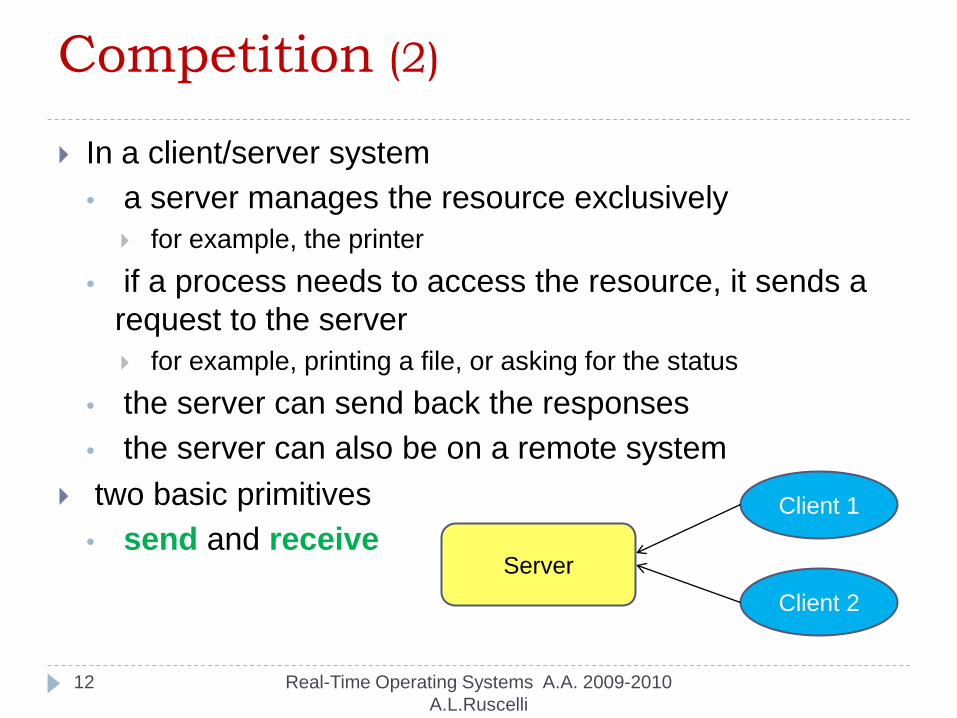
Competition (2)
In a client/server system• a server manages the resource exclusively
for example, the printer• if a process needs to access the resource, it sends a
request to the server for example, printing a file, or asking for the status
• the server can send back the responses• the server can also be on a remote system
two basic primitives• send and receive
Server
Client 1
Client 2
12 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Cooperation Cooperative activities know about each other they do not need memory protection
not using memory protection, we have less overhead they need to access the same data structures allocation of the resource is de-centralized shared memory is the best model the thread model of execution is the best one
13 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Cooperation and Competition Competition is best resolved by using the message
passing model however it can be implemented using a shared memory
paradigm too Cooperation is best implemented by using the
shared memory paradigm however, it can be realized by using pure message
passing mechanisms shared memory or message passing? in the past, there were OSs that supported only shared
memory or only message passing
14 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Cooperation and Competition (2) A general purpose OS needs to support both
models we need at least protection for competing activities we need to support client/server models. So we need
messag passing primitives we need to support shared memory for reducing the
overhead some special OS supports only one of the two for example, many RTOS support only shared memory
15 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Interference There is a third kind of interaction, the interference It is due to two kinds of programming errors: interactions between processes that are not required by
the semantic of the problem erroneous solution to the problems of interaction
interference problems are usually time-dependent problems
16 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Model of Concurrency Shared memory Critical section Synchronization
17 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Shared memory Shared memory communication it was the first one to be supported in old OSs it is the simplest one and the closest to the machine all threads can access the same memory locations
18 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
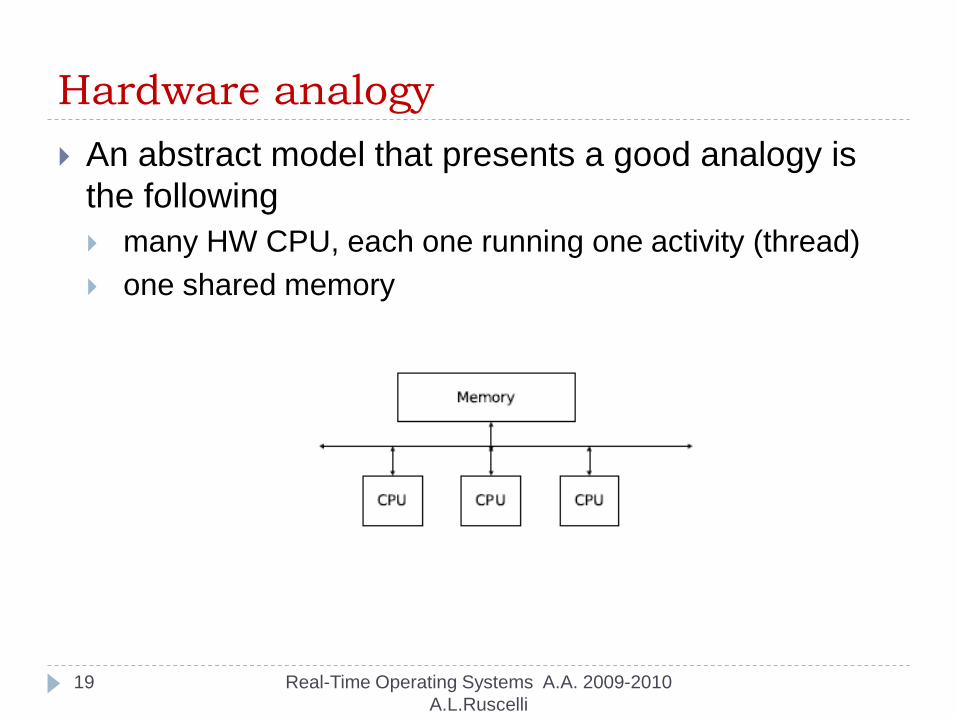
Hardware analogy An abstract model that presents a good analogy is
the following many HW CPU, each one running one activity (thread) one shared memory
19 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
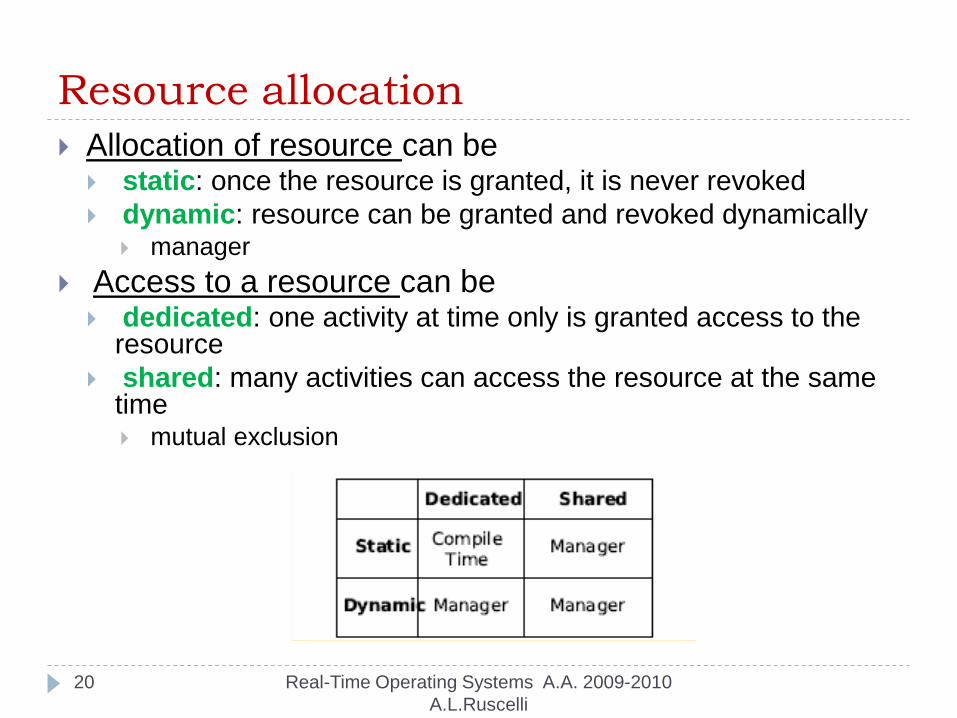
Resource allocation Allocation of resource can be static: once the resource is granted, it is never revoked dynamic: resource can be granted and revoked dynamically
manager Access to a resource can be dedicated: one activity at time only is granted access to the
resource shared: many activities can access the resource at the same
time mutual exclusion
20 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Mutual exclusion problem We do not know in advance the relative speed of the
processes hence, we do not know the order of execution of the
hardware instructions
recall the example of incrementing variable x incrementing x is not an atomic operation atomic behavior can be obtained using interrupt disabling
or special atomic instructions
21 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
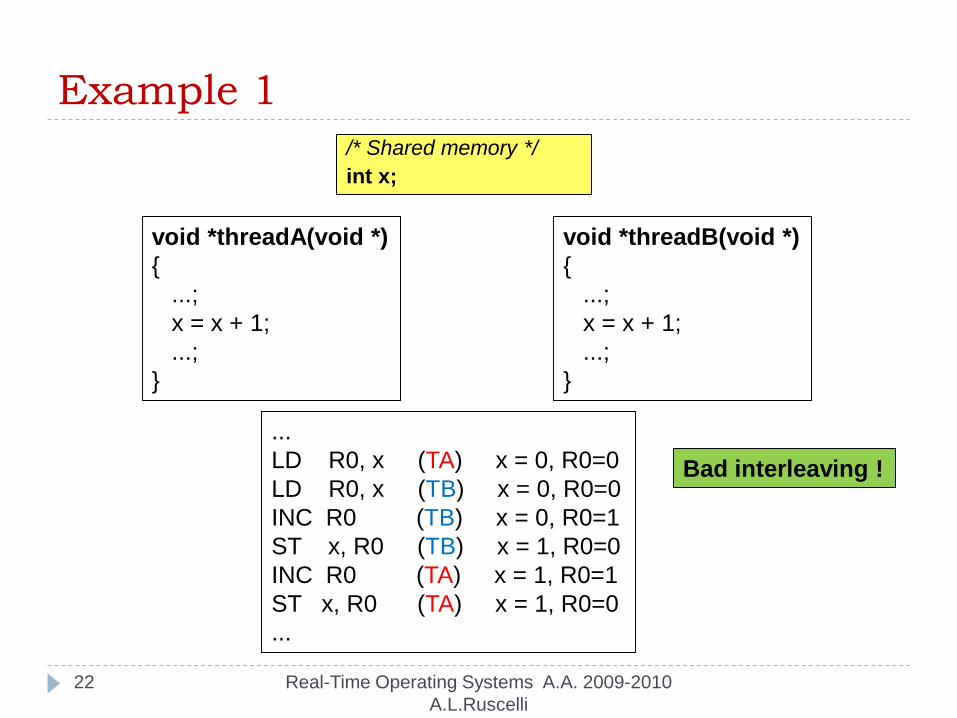
Example 1/* Shared memory */int x;
void *threadA(void *){
...;x = x + 1;...;
}
void *threadB(void *){
...;x = x + 1;...;
}
...LD R0, x (TA) x = 0, R0=0LD R0, x (TB) x = 0, R0=0INC R0 (TB) x = 0, R0=1ST x, R0 (TB) x = 1, R0=0INC R0 (TA) x = 1, R0=1ST x, R0 (TA) x = 1, R0=0...
Bad interleaving !
22 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
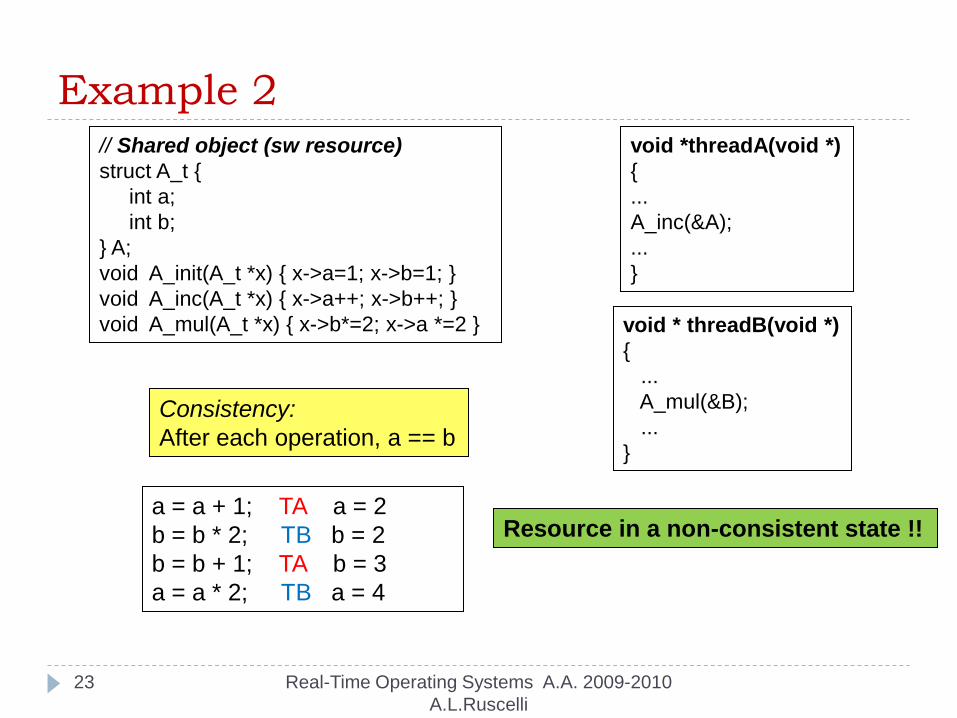
Example 2// Shared object (sw resource)struct A_t {
int a;int b;
} A;void A_init(A_t *x) { x->a=1; x->b=1; }void A_inc(A_t *x) { x->a++; x->b++; }void A_mul(A_t *x) { x->b*=2; x->a *=2 }
void *threadA(void *){...A_inc(&A);...}
void * threadB(void *){
...A_mul(&B);...
}
Consistency:After each operation, a == b
a = a + 1; TA a = 2b = b * 2; TB b = 2b = b + 1; TA b = 3a = a * 2; TB a = 4
Resource in a non-consistent state !!
23 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Consistency For any resource, we can state a set of consistency
properties a consistency property Ci is a boolean expression on the
values of the internal variables a consistency property must hold before and after each
operation it does not need to hold during an operation if the operations are properly sequentialized, the consistency
properties will always hold Formal verification let R be a resource and let C(R) be a set of consistency
properties on the resource R C(R) = {Ci}
Definition: A concurrent program is correct if, for every possible interleaving of the operations on the resource, ∀ Ci ∈ C(R), Ci holds.
24 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
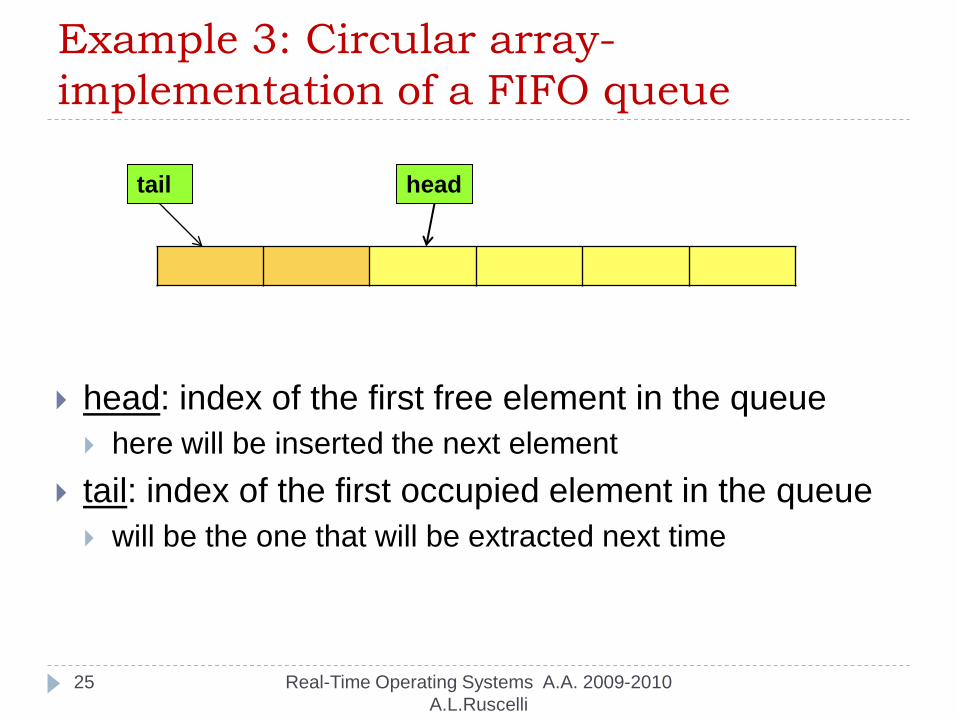
Example 3: Circular array-implementation of a FIFO queue
head: index of the first free element in the queue here will be inserted the next element
tail: index of the first occupied element in the queue will be the one that will be extracted next time
25 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
tail head
Circular array: implementation of a FIFO queue
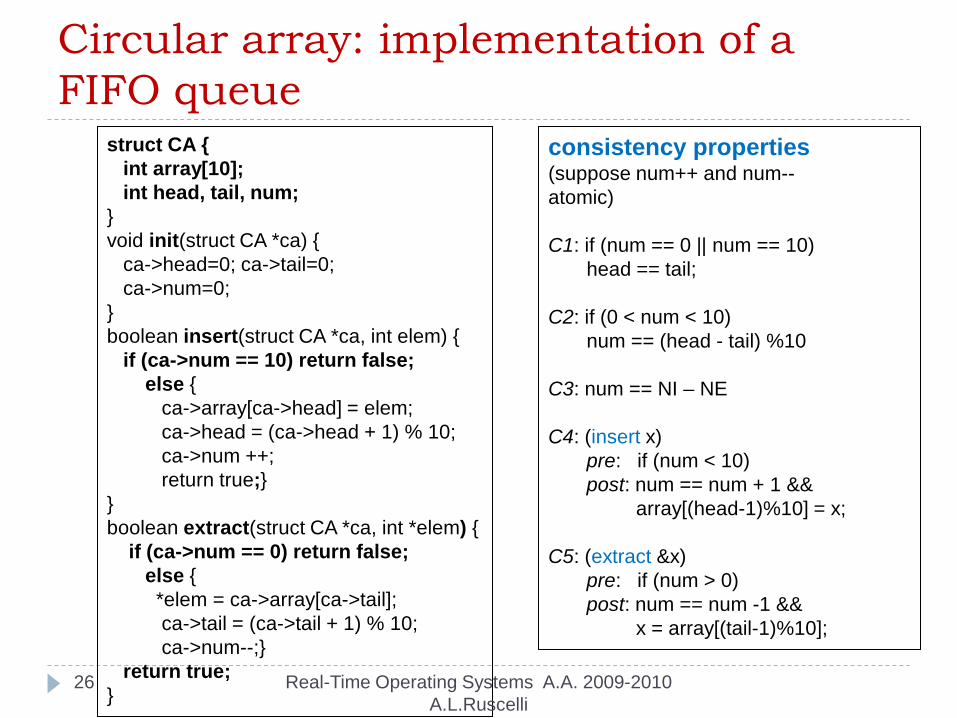
struct CA {int array[10];int head, tail, num;
}void init(struct CA *ca) {
ca->head=0; ca->tail=0;ca->num=0;
}boolean insert(struct CA *ca, int elem) {
if (ca->num == 10) return false;else {
ca->array[ca->head] = elem;ca->head = (ca->head + 1) % 10;ca->num ++;return true;}
}boolean extract(struct CA *ca, int *elem) {
if (ca->num == 0) return false;else {*elem = ca->array[ca->tail];ca->tail = (ca->tail + 1) % 10;ca->num--;}
return true;}
26
consistency properties(suppose num++ and num--atomic)
C1: if (num == 0 || num == 10)head == tail;
C2: if (0 < num < 10)num == (head - tail) %10
C3: num == NI – NE
C4: (insert x)pre: if (num < 10)post: num == num + 1 &&
array[(head-1)%10] = x;
C5: (extract &x)pre: if (num > 0)post: num == num -1 &&
x = array[(tail-1)%10];
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Consistency properties
27
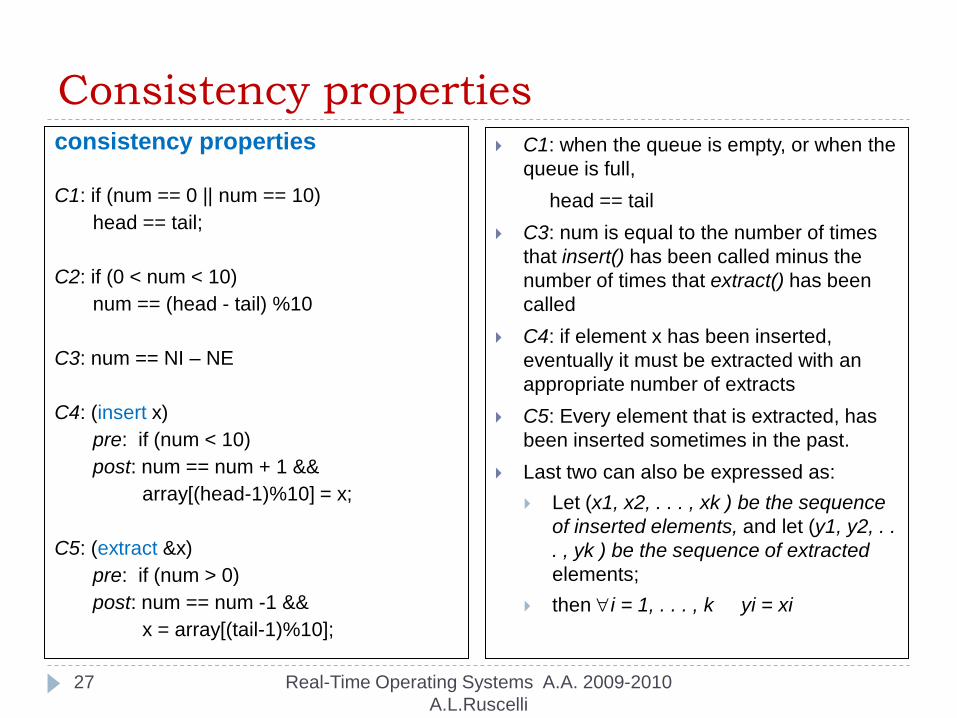
consistency properties
C1: if (num == 0 || num == 10)head == tail;
C2: if (0 < num < 10)num == (head - tail) %10
C3: num == NI – NE
C4: (insert x)pre: if (num < 10)post: num == num + 1 &&
array[(head-1)%10] = x;
C5: (extract &x)pre: if (num > 0)post: num == num -1 &&
x = array[(tail-1)%10];
C1: when the queue is empty, or when the queue is full,
head == tail C3: num is equal to the number of times
that insert() has been called minus the number of times that extract() has been called
C4: if element x has been inserted, eventually it must be extracted with an appropriate number of extracts
C5: Every element that is extracted, has been inserted sometimes in the past.
Last two can also be expressed as: Let (x1, x2, . . . , xk ) be the sequence
of inserted elements, and let (y1, y2, . . . , yk ) be the sequence of extracted elements;
then ∀i = 1, . . . , k yi = xi
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Consistency properties for struct CA1. When the queue is empty, or when the queue is full, head ==
tail2. num is equal to the number of times that insert() has
been called minus the number of times that extract() has been called
3. If element x has been inserted, eventually it must be extracted with an appropriate number of extracts
4. Every element that is extracted, has been inserted sometimes in the past.
Last two can also be expressed as: Let (x1, x2, . . . , xk ) be the sequence of inserted elements,
and let (y1, y2, . . . , yk ) be the sequence of extracted elements;
then ∀i = 1, . . . , k yi = xi
28 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
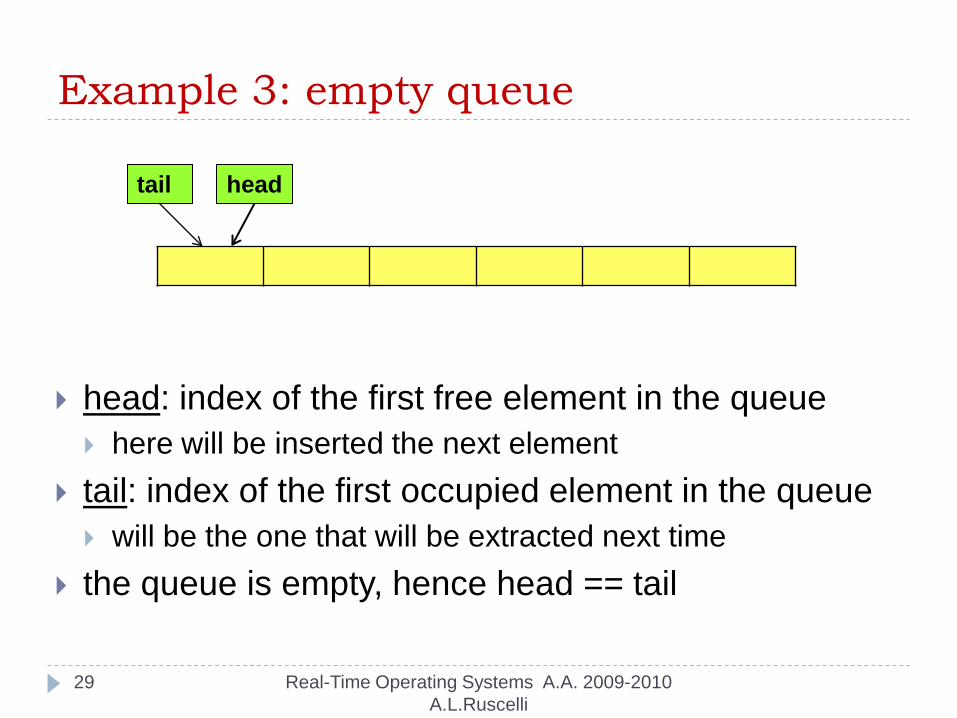
Example 3: empty queue
head: index of the first free element in the queue here will be inserted the next element
tail: index of the first occupied element in the queue will be the one that will be extracted next time
the queue is empty, hence head == tail
29 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
tail head
Example 3: circular array - insert
30
lavagna
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
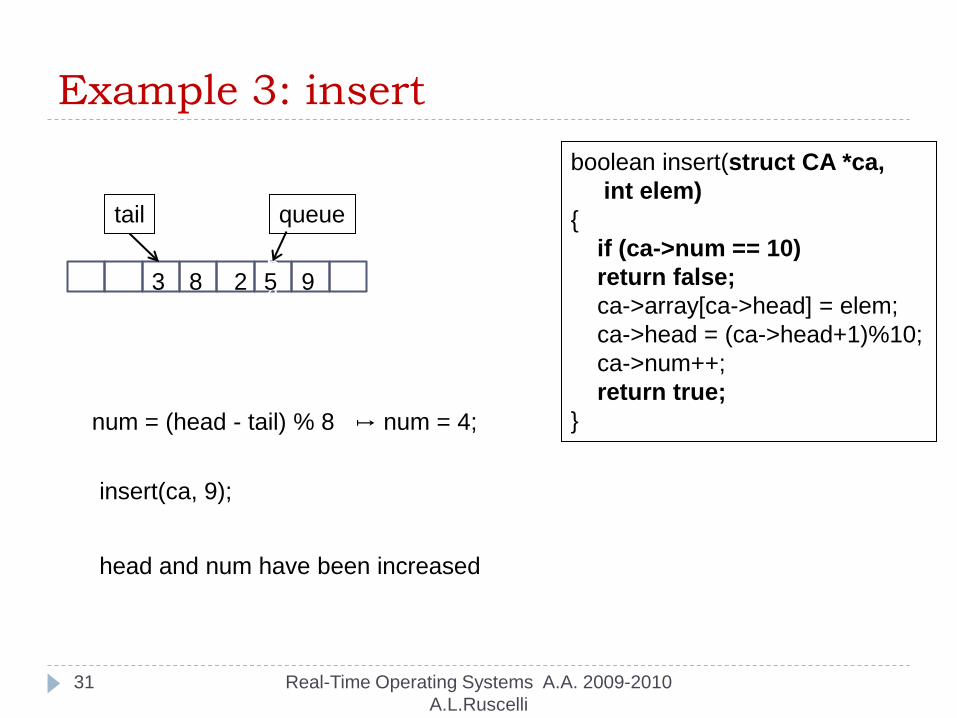
Example 3: insertboolean insert(struct CA *ca,
int elem){
if (ca->num == 10)return false;ca->array[ca->head] = elem;ca->head = (ca->head+1)%10;ca->num++;return true;
}
5545
3 8 2 5
tail queue
num = (head - tail) % 8 ↦ num = 4;
insert(ca, 9);
head and num have been increased
9
31 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Example 3: circular array - extract
32
lavagna
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
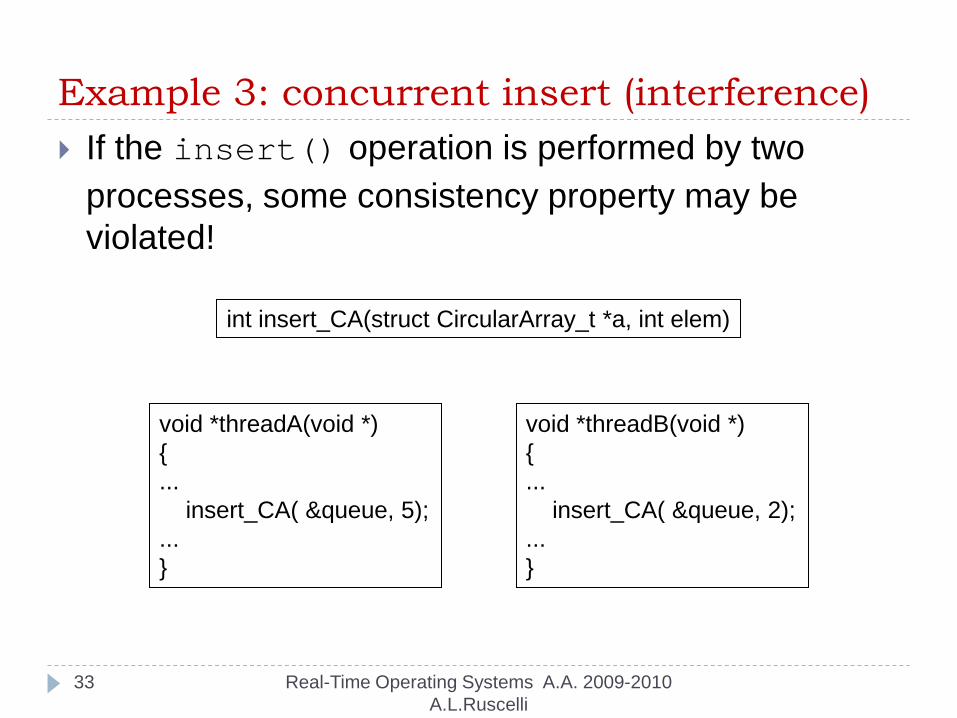
Example 3: concurrent insert (interference)
33
If the insert() operation is performed by two processes, some consistency property may be violated!
int insert_CA(struct CircularArray_t *a, int elem)
void *threadA(void *){...
insert_CA( &queue, 5);...}
void *threadB(void *){...
insert_CA( &queue, 2);...}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
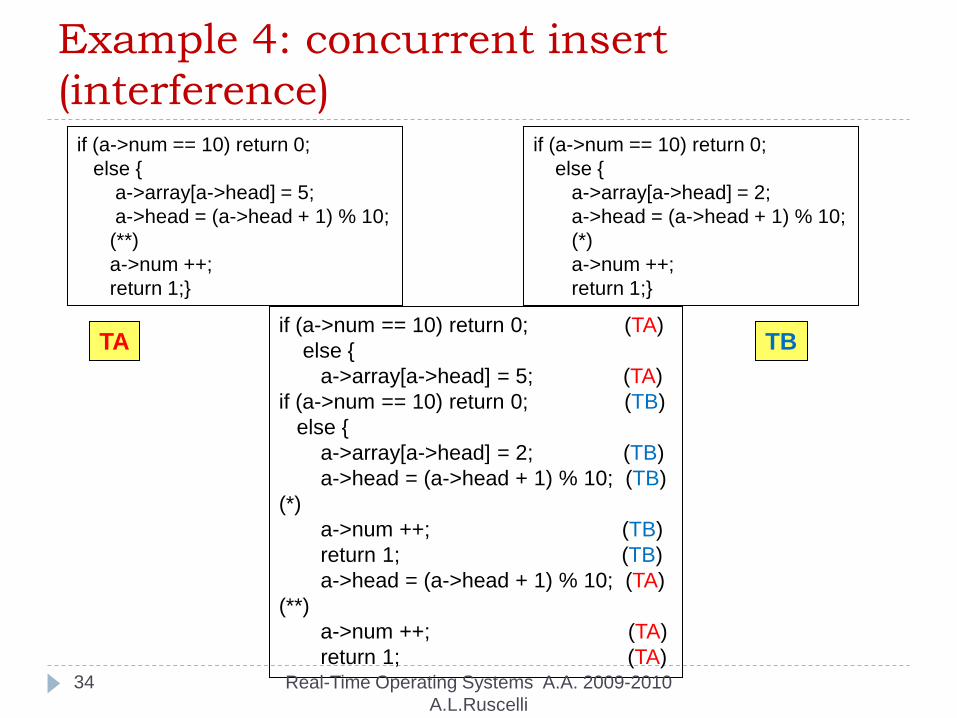
Example 4: concurrent insert (interference)
34
if (a->num == 10) return 0; (TA)else {
a->array[a->head] = 5; (TA)if (a->num == 10) return 0; (TB)
else {a->array[a->head] = 2; (TB)a->head = (a->head + 1) % 10; (TB)
(*)a->num ++; (TB)return 1; (TB)a->head = (a->head + 1) % 10; (TA)
(**)a->num ++; (TA)return 1; (TA)
if (a->num == 10) return 0;else {
a->array[a->head] = 5;a->head = (a->head + 1) % 10;(**)a->num ++;return 1;}
if (a->num == 10) return 0;else {
a->array[a->head] = 2;a->head = (a->head + 1) % 10;(*)a->num ++;return 1;}
TA TB
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
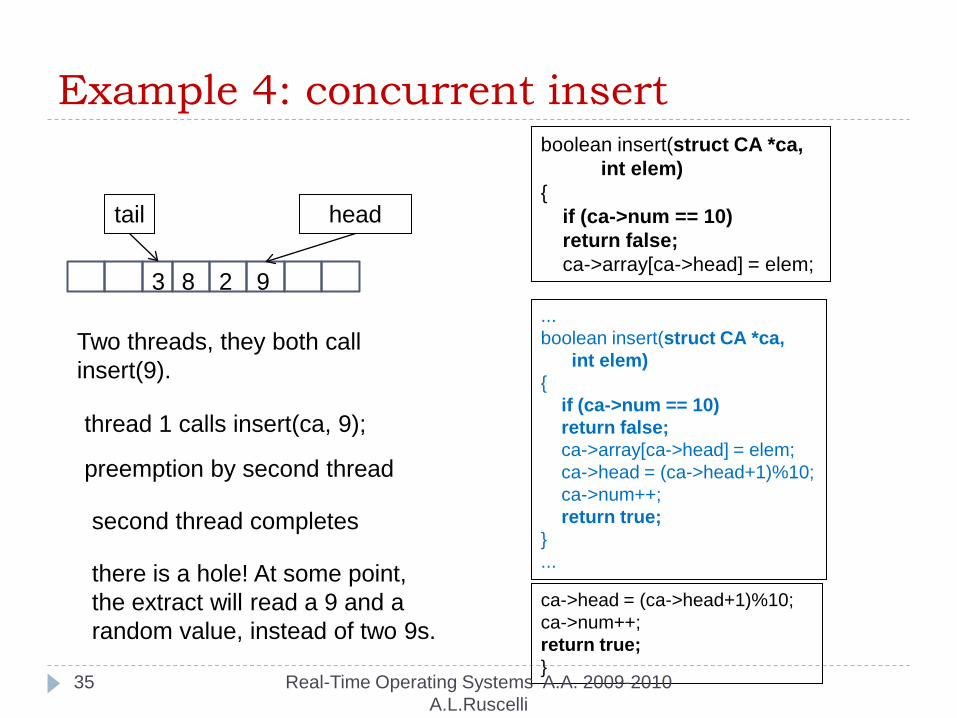
Example 4: concurrent insert
33 8 2
tail head
Two threads, they both callinsert(9).
boolean insert(struct CA *ca,int elem)
{if (ca->num == 10)return false;ca->array[ca->head] = elem;
thread 1 calls insert(ca, 9);
preemption by second thread
...boolean insert(struct CA *ca,
int elem){
if (ca->num == 10)return false;ca->array[ca->head] = elem;ca->head = (ca->head+1)%10;ca->num++;return true;
}...
second thread completes
ca->head = (ca->head+1)%10;ca->num++;return true;}
there is a hole! At some point,the extract will read a 9 and arandom value, instead of two 9s.
9
35 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Example 3: Correctness of Circular Array implementation The previous program is not correct, as the last
property is not verified the sequence of extracted elements does not correspond
to the sequence of inserted elements The problem is that the first thread was preempted while
updating the data structure in a critical point. we must prevent thread 2 from accessing the data
structure while another thread is completing an operation on it
36 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Example 3: Correctness Proving the non-correctness is easy, in the sense
that we must find a counterexample Proving the correctness is a very complex task! it is necessary to prove the correctness for every possible
interleaving of every operation, for every possible inputdata and for every possible internal state
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
37
Insert and Extract What happens if an insert() and an extract() are
interleaved? Let’s assume that increments and decrements are atomic
operations Producer: thread that inserts elements Consumer: thread that extracts elements
It can be proved that interleaving exactly one producer and one consumer does not bring any problem
Proof: if 0 < num < 10, insert() and extract() are independent if num==0
if extract() begins before insert, it immediately returns false, if insert() begins before, extract will still return false, so it cannot interfere
with insert same thing when num==10
Correctness is guaranteed for one consumer and oneproducer.
38 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
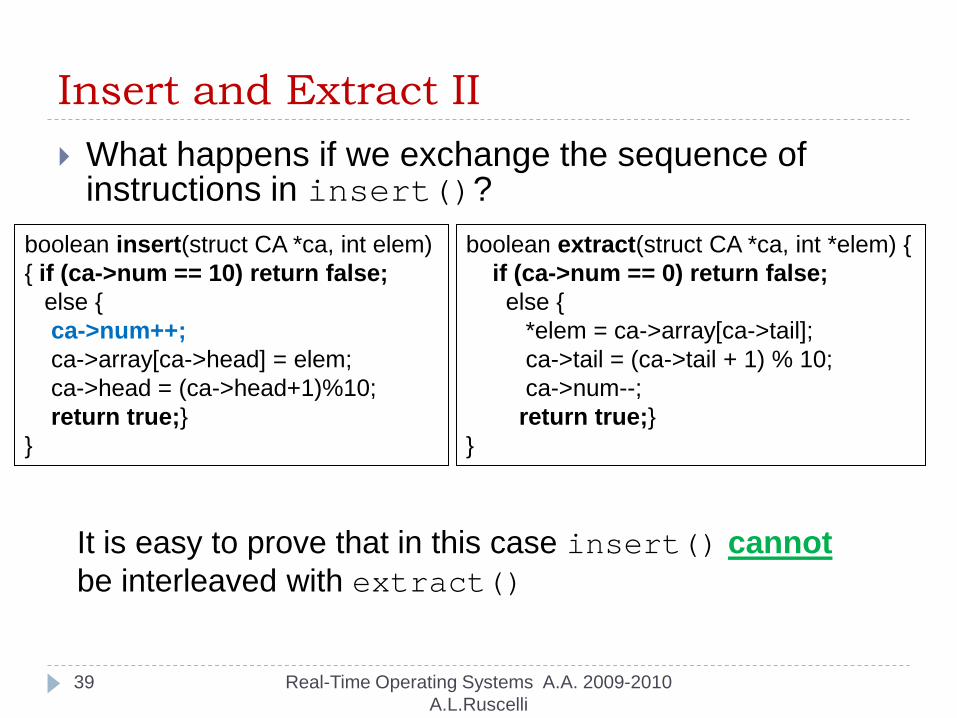
Insert and Extract II What happens if we exchange the sequence of
instructions in insert()?boolean insert(struct CA *ca, int elem){ if (ca->num == 10) return false;
else {ca->num++;ca->array[ca->head] = elem;ca->head = (ca->head+1)%10;return true;}
}
It is easy to prove that in this case insert() cannotbe interleaved with extract()
39
boolean extract(struct CA *ca, int *elem) {if (ca->num == 0) return false;else {
*elem = ca->array[ca->tail];ca->tail = (ca->tail + 1) % 10;ca->num--;
return true;}}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Circular array properties
40
a) If more than one thread executes insert_CA() inconsistency!!
b) If we have only two threads one threads calls insert_CA() and the other thread
calls extract_CA() no inconsistency!
The order of the operations is important! a wrong order can make the object inconsistent even
under the assumption b) the case is when num is incremented but the data has not yet
been inserted in any case, the final result depends on the timings of the
different requests (e.g, an insertion with the buffer full)
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Exercise: non-atomic increment Problem: in the previous examples, we supposed that num++ and num-- are atomic operations
what happens if they are not atomic? question: assuming that operation -- and ++ are not atomic, and
assuming that we have only one producer and one consumer, can we make the Circular Array safe?
hint: try to substitute variable num with two booleanvariables, bool empty and bool full;
41 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Outline Model of concurrency: shared memory Critical Sections
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
42

Critical section: definitions
43
The shared object where the conflict may happen is a resource
The parts of the code where the problem may happen are called critical sections
A critical section is a sequence of operations that cannot be interleaved with other operations on the same resource
Two critical sections on the same resource must be properly sequentialized
We say that two critical sections on the same resource must execute in MUTUAL EXCLUSION
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Mutual Exclusion There are three ways to obtain mutual exclusion
1. implementing the critical section as an atomic operation
2. disabling the preemption (system-wide)3. selectively disabling the preemption (using
semaphores and mutual exclusion)
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
44
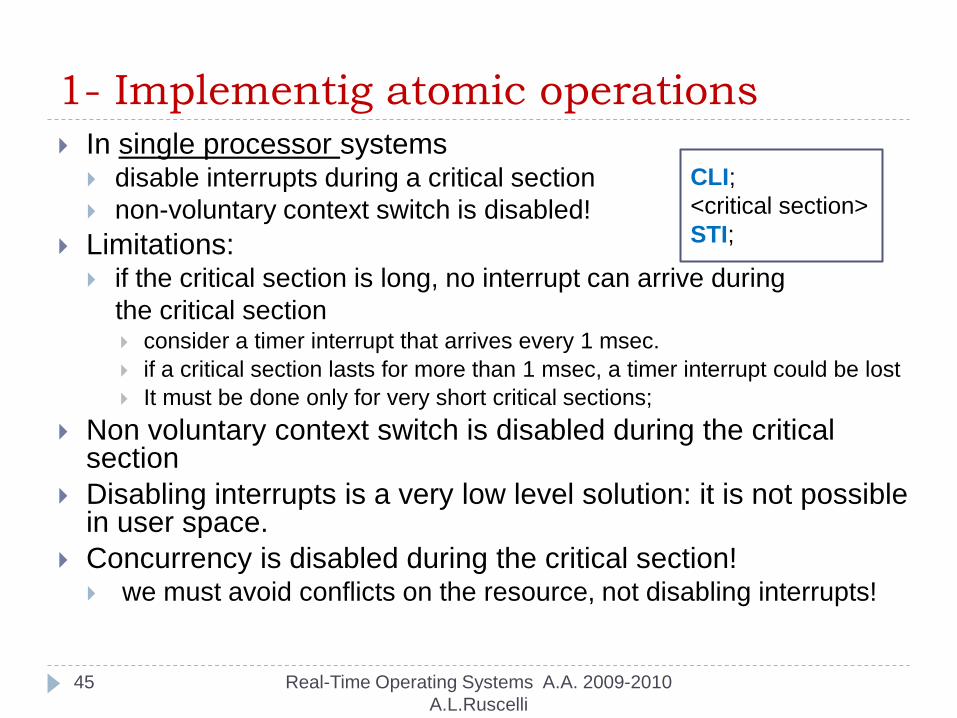
1- Implementig atomic operations In single processor systems disable interrupts during a critical section non-voluntary context switch is disabled!
Limitations: if the critical section is long, no interrupt can arrive during
the critical section consider a timer interrupt that arrives every 1 msec. if a critical section lasts for more than 1 msec, a timer interrupt could be lost It must be done only for very short critical sections;
Non voluntary context switch is disabled during the critical section
Disabling interrupts is a very low level solution: it is not possiblein user space.
Concurrency is disabled during the critical section! we must avoid conflicts on the resource, not disabling interrupts!
CLI;<critical section>STI;
45 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
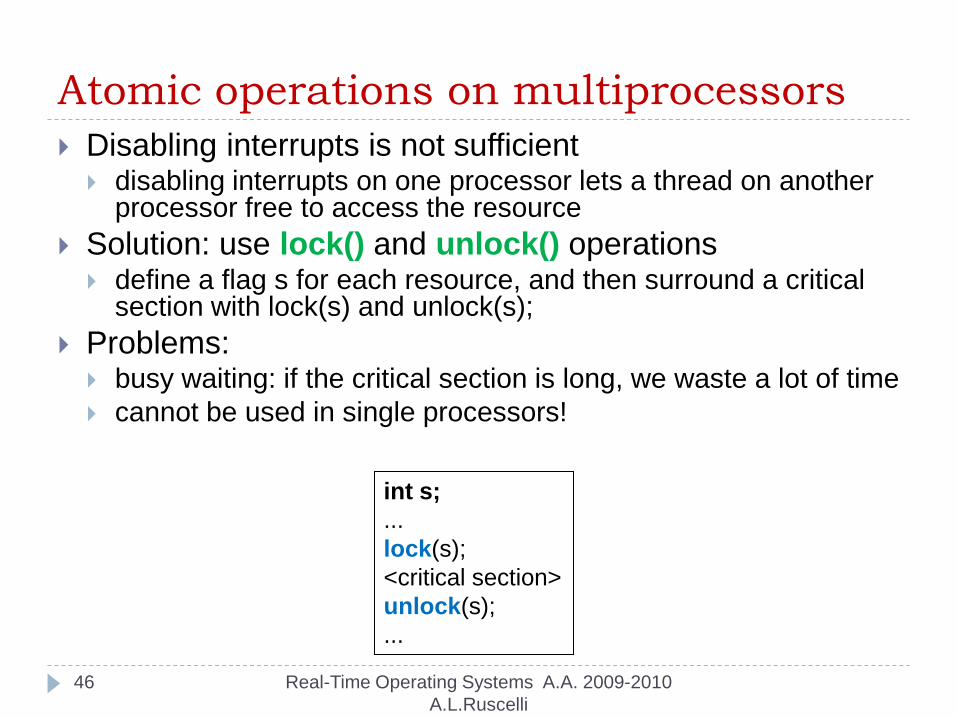
Atomic operations on multiprocessors Disabling interrupts is not sufficient disabling interrupts on one processor lets a thread on another
processor free to access the resource Solution: use lock() and unlock() operations define a flag s for each resource, and then surround a critical
section with lock(s) and unlock(s); Problems: busy waiting: if the critical section is long, we waste a lot of time cannot be used in single processors!
int s;...lock(s);<critical section>unlock(s);...
46 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Low level synchronisation in SMP
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
47
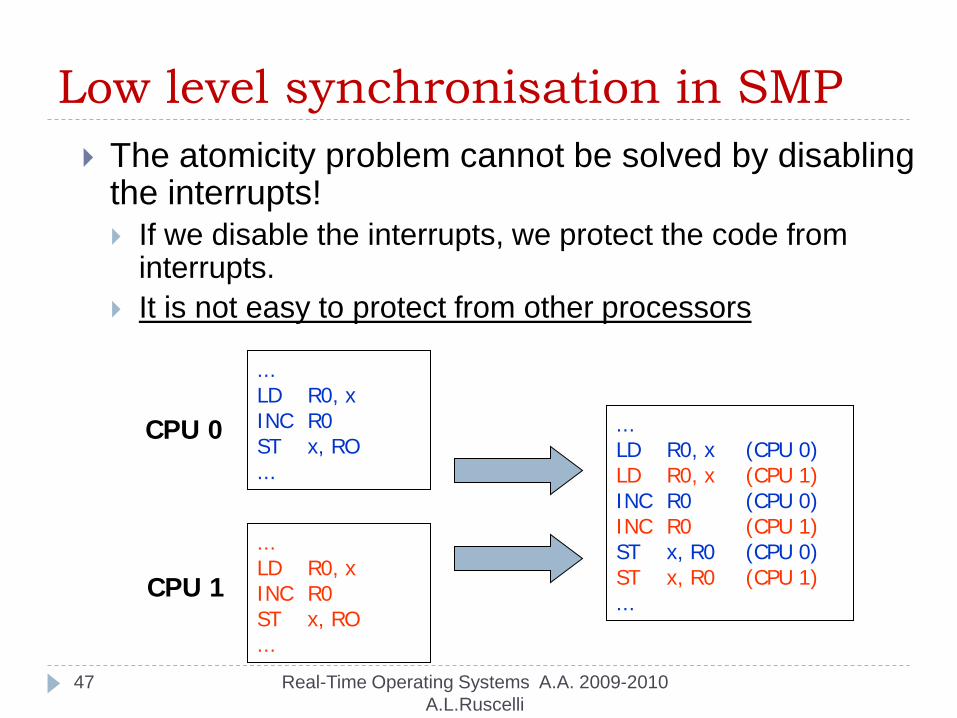
The atomicity problem cannot be solved by disabling the interrupts! If we disable the interrupts, we protect the code from
interrupts. It is not easy to protect from other processors
...LD R0, xINC R0ST x, RO...
...LD R0, xINC R0ST x, RO...
...LD R0, x (CPU 0)LD R0, x (CPU 1)INC R0 (CPU 0)INC R0 (CPU 1)ST x, R0 (CPU 0)ST x, R0 (CPU 1)...
CPU 0
CPU 1
Low level synchronisation in SMP
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
48
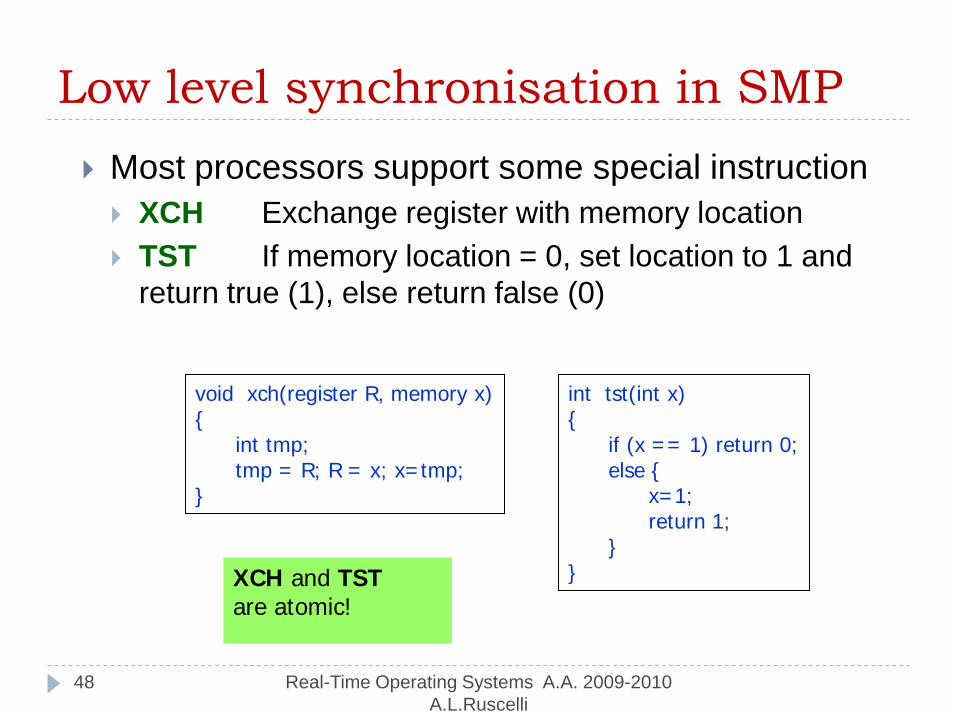
Most processors support some special instruction XCH Exchange register with memory location TST If memory location = 0, set location to 1 and
return true (1), else return false (0)
XCH and TSTare atomic!
void xch(register R, memory x){
int tmp;tmp = R; R = x; x=tmp;
}
int tst(int x){
if (x == 1) return 0;else {
x=1;return 1;
}}

Locking in multi-processors
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
49
We define one variable s If s == 0, then we can perform the critical operation If s == 1, then must wait before performing the critical operation
Using XCH or TST we can implement two functions:
lock() unlock()
void lock(int s){
int a = 1;while (a==1) XCH (s,a);
}
void lock(int x){
while (TST (s) == 0);}
void unlock(int s){
s = 0;}
2 - Disabling preemption On single processor systems in some scheduler, it is possible to disable preemption for
a limited interval of time problems: if a high priority critical thread needs to execute, it cannot
make preemption and it is delayed even if the high priority task does not access the
resource!
disable_preemption();<critical section>enable_preemption();
no context switch may happen duringthe critical section,but interrupts are enabled
50 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
3 - Selectively disabling preemption
51
Some general mechanisms exist to implement mutual exclusion only between the processes that use a resource: Semaphores Mutex
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Critical section: a general approach General techniques exist to protect critical sections Semaphores Mutex
Properties: Interrupts always enabled Preemption always enabled
Basic idea: if a thread is inside a critical section on a given resource
all other threads are blocked upon entrance on the criticalsection on the same resource -> selectivity
We will study such techniques in the following
52 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Outline Model of concurrency: shared memory Synchronization
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
53
Synchronization: Producer/Consumer model Mutual exclusion is not the only problem we need a way of synchronize two or more threads
example: producer/consumer suppose we have two threads, one produces some integers and sends them to another
thread (PRODUCER) another one takes the integer and elaborates it
(CONSUMER)
ConsumerProducer
54 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Producer/Consumer: implementation with circular array Suppose that the two threads have different speeds for example, the producer is much faster than the
consumer we need to store the temporary results of the producer in
some memory buffer, so that no data are lost for our example, we will use the circular array structure,
the CircularArray_t structure
55 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
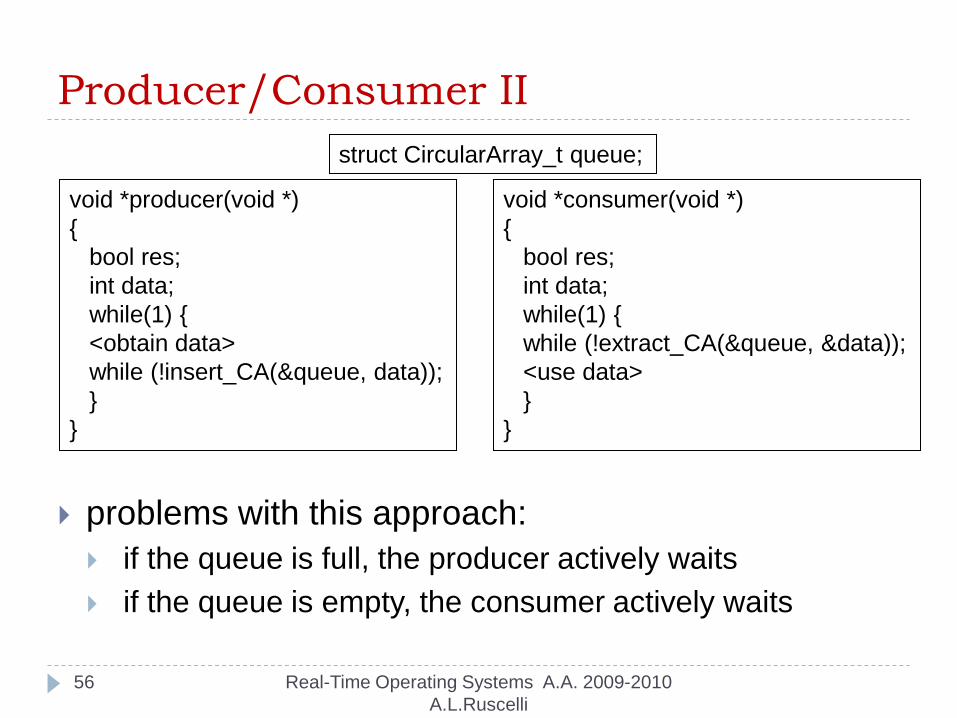
Producer/Consumer II
56
problems with this approach: if the queue is full, the producer actively waits if the queue is empty, the consumer actively waits
struct CircularArray_t queue;
void *producer(void *){
bool res;int data;while(1) {<obtain data>while (!insert_CA(&queue, data));}
}
void *consumer(void *){
bool res;int data;while(1) {while (!extract_CA(&queue, &data));<use data>}
}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
A more general approach
57
We need to provide a general mechanism for synchronization and mutual exclusion
requirements provide mutual exclusion between critical sections
avoid two interleaved insert() operations (semaphores, mutexes)
synchronize two threads on one condition for example, block the producer when the queue is full (semaphores, condition variables)
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli

Outline Semaphores
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
58
A general mechanism for blocking tasks: semaphores
59
The semaphore mechanism was first proposed by Dijkstra
A semaphore is an abstract data type that consists of a counter a blocking queue operation wait operation signal
The operations on a semaphore must be atomic the OS makes them atomic by appropriate low-level
mechanisms
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Semaphores definitions
60
Semaphores are a basic mechanisms for providingsynchronization
it has been shown that every kind of synchronization and mutual exclusion can be implemented by using semaphores
we will analyze possible implementation of the semaphore mechanism later
typedef struct {<blocked queue> blocked;int counter;} sem_t;void sem_init (sem_t &s, int n);void sem_wait (sem_t &s);void sem_post (sem_t &s);
Note:the real prototypeof sem_init isslightly different!
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Wait and signal
61
A wait operation has the following behavior if counter == 0, the requiring thread is blocked
it is removed from the ready queue it is inserted in the blocked queue
if counter > 0, then counter--; a post operation has the following behavior if counter == 0 and there is some blocked thread,
unblock it the thread is removed from the blocked queue it is inserted in the ready queue
otherwise, increment counter
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Semaphores
62
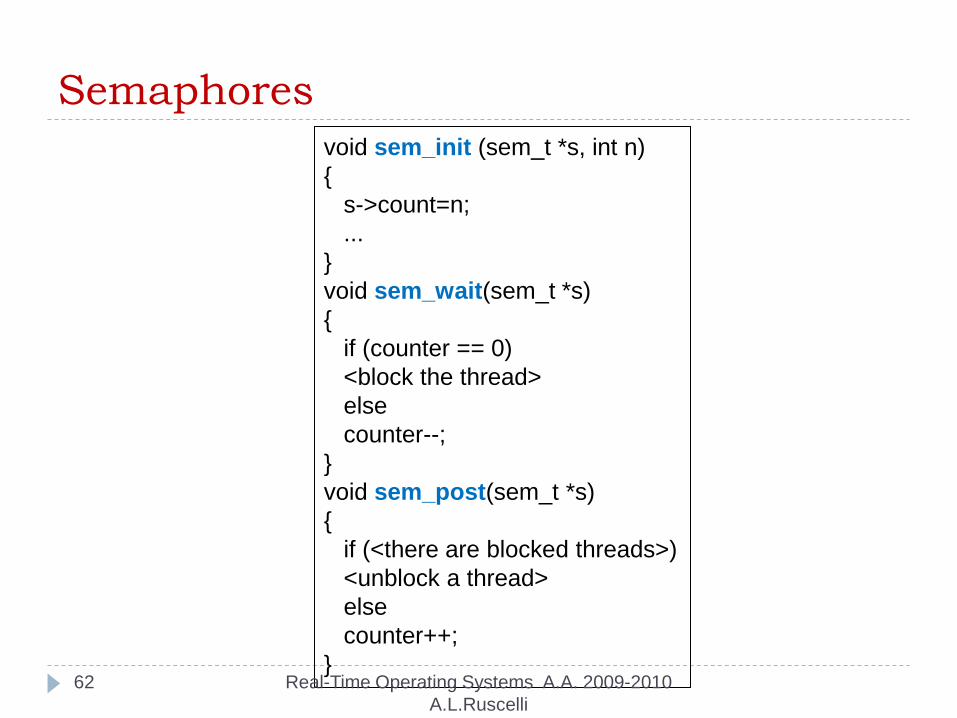
void sem_init (sem_t *s, int n){
s->count=n;...
}void sem_wait(sem_t *s){
if (counter == 0)<block the thread>elsecounter--;
}void sem_post(sem_t *s){
if (<there are blocked threads>)<unblock a thread>elsecounter++;
}Real-Time Operating Systems A.A. 2009-2010
A.L.Ruscelli
Signal semantic What happens when a thread blocks on a semaphore? in general, it is inserted in a BLOCKED queue
extraction from the blocking queue can follow different semantics: strong semaphore
the threads are removed in well-specified order for example, the FIFO order is the fairest policy, or priority based
ordering, ... signal and suspend
after the new thread has been unblocked, a thread switch happens signal and continue
after the new thread has been unblocked, the thread that executed the signal continues to execute
concurrent programs should not rely too much on thesemaphore semantic
63 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli

Mutual exclusion with semaphores: Mutex
64
How to use a semaphore for critical sections define a semaphore initialized to 1 before entering the critical section, perform a wait after leaving the critical section, perform a post
sem_t s;...sem_init(&s, 1);
void *threadA(void *arg){...sem_wait(&s);<critical section>sem_post(&s);...}
void *threadB(void *arg){...sem_wait(&s);<critical section>sem_post(&s);...}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli

Mutual exclusion: example
65
Semaphorecounter 1
Blocked queue
Ready queue
TB TA
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli

Mutual exclusion: example
66
Semaphorecounter 0
Blocked queue
Ready queue
TB TA
s.wait(); (TA)
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
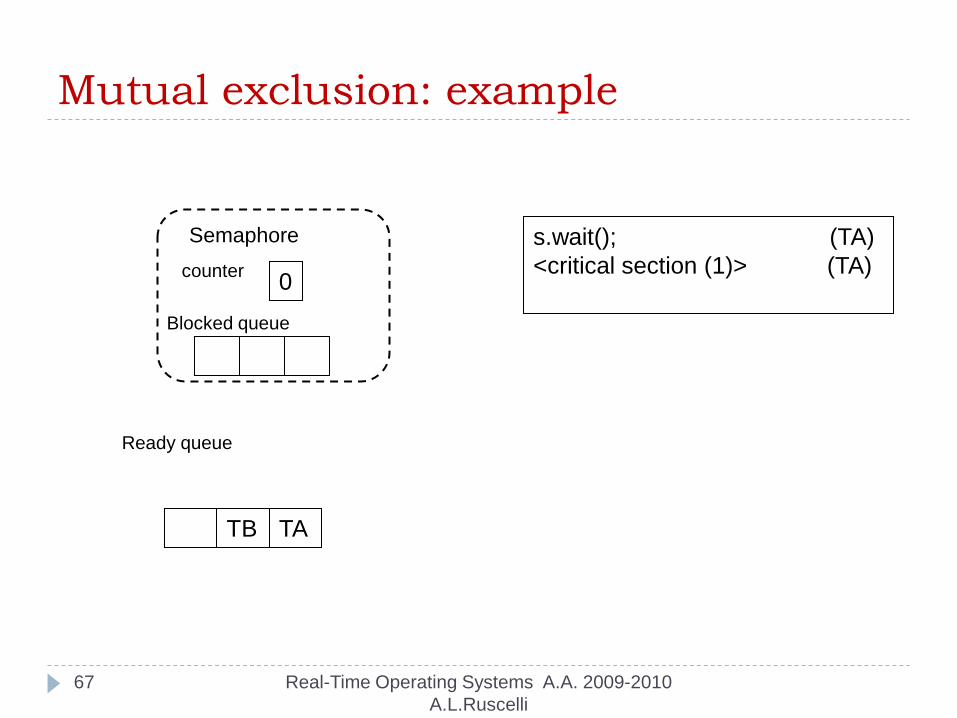
Mutual exclusion: example
67
Semaphorecounter 0
Blocked queue
Ready queue
TB TA
s.wait(); (TA) <critical section (1)> (TA)
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
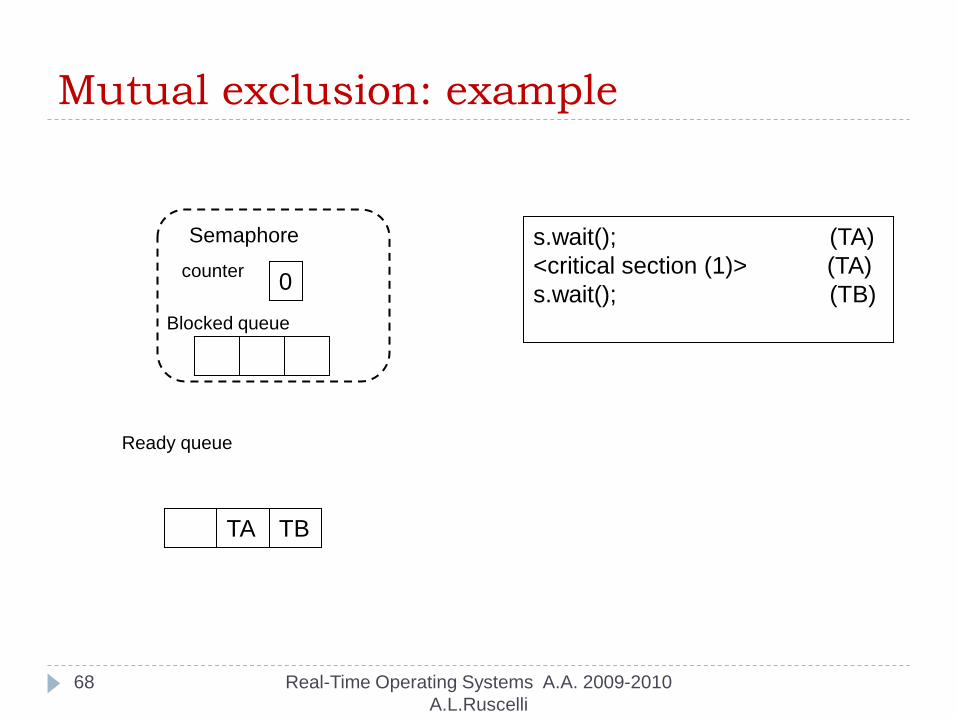
Mutual exclusion: example
68
Semaphorecounter 0
Blocked queue
Ready queue
TA TB
s.wait(); (TA) <critical section (1)> (TA) s.wait(); (TB)
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
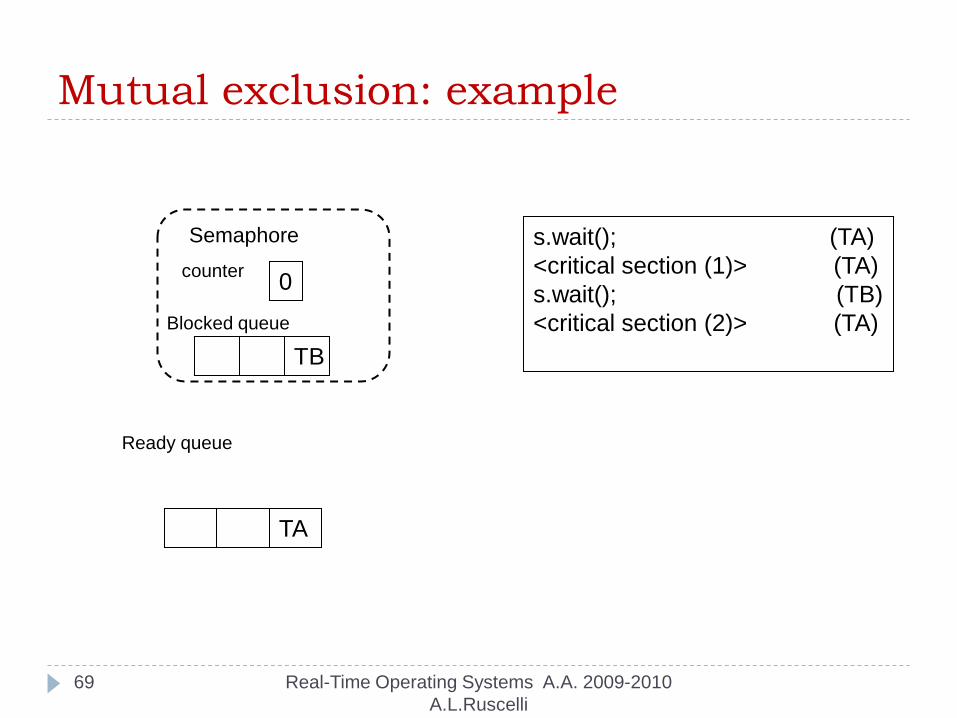
Mutual exclusion: example
69
Semaphorecounter 0
Blocked queue
Ready queue
TA
s.wait(); (TA) <critical section (1)> (TA) s.wait(); (TB) <critical section (2)> (TA)
TB
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Mutual exclusion: example
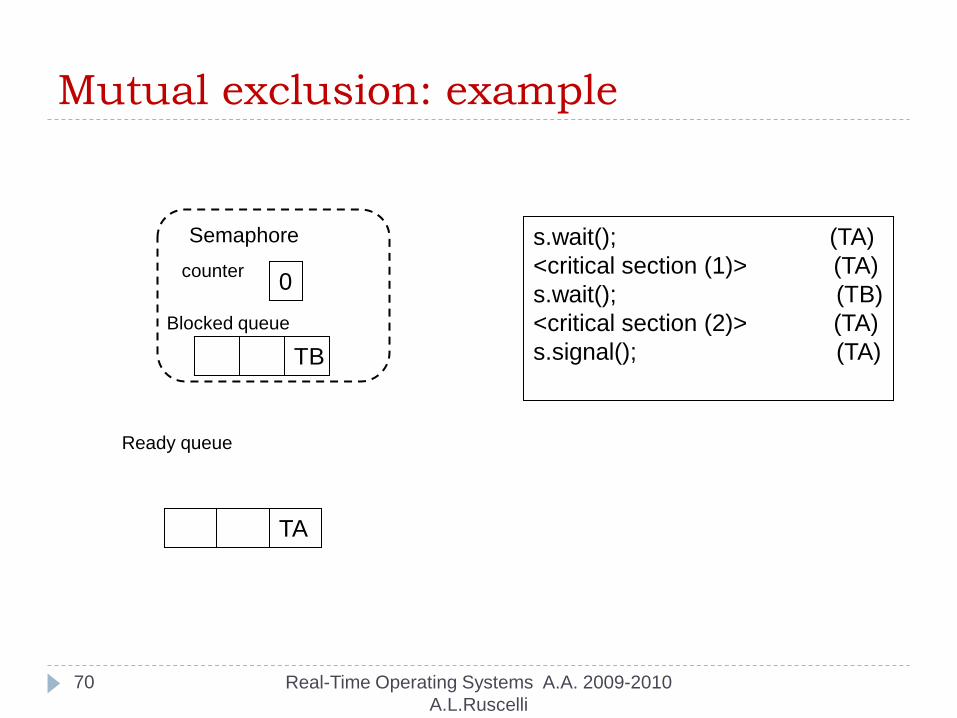
70
Semaphorecounter 0
Blocked queue
Ready queue
TA
s.wait(); (TA) <critical section (1)> (TA) s.wait(); (TB) <critical section (2)> (TA) s.signal(); (TA)TB
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Mutual exclusion: example
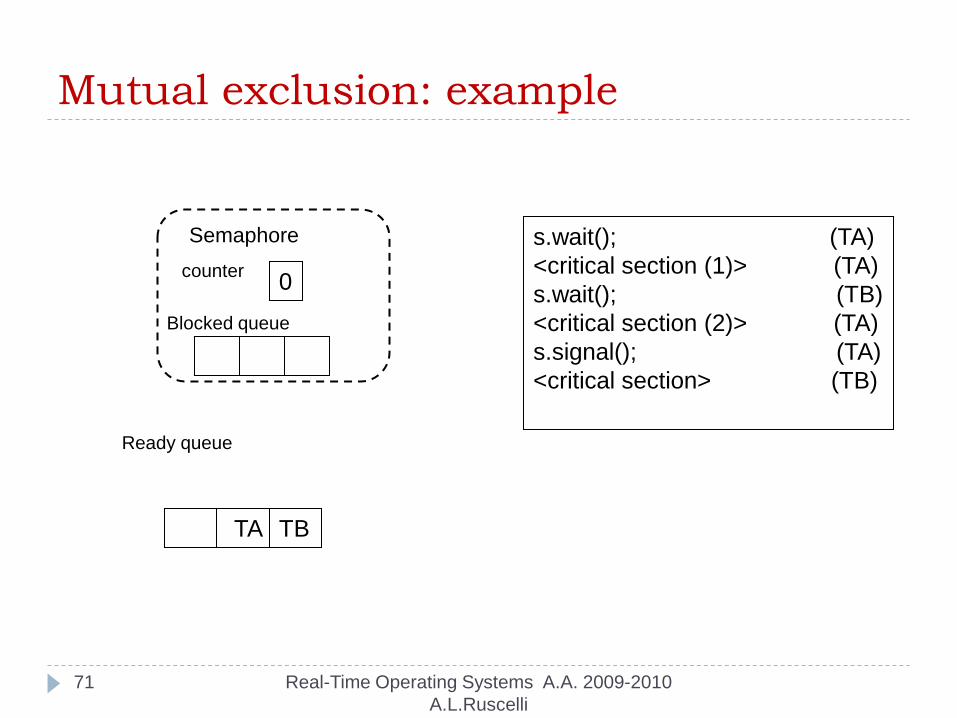
71
Semaphorecounter 0
Blocked queue
Ready queue
TB
s.wait(); (TA) <critical section (1)> (TA) s.wait(); (TB) <critical section (2)> (TA) s.signal(); (TA) <critical section> (TB)
TA
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Mutual exclusion: example
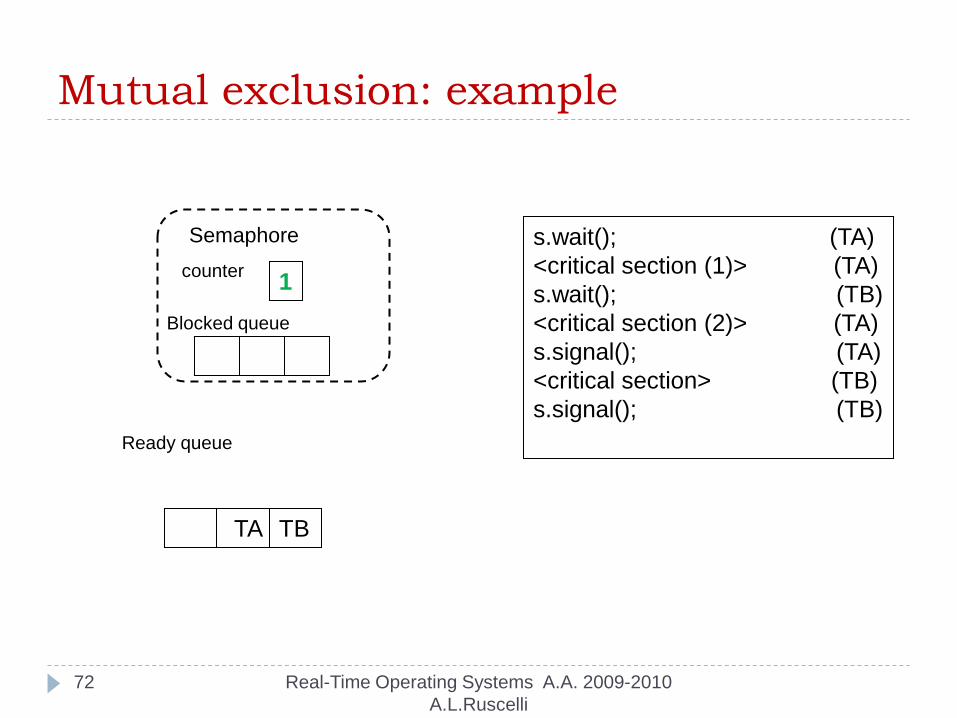
72
Semaphorecounter 1
Blocked queue
Ready queue
TB
s.wait(); (TA) <critical section (1)> (TA) s.wait(); (TB) <critical section (2)> (TA) s.signal(); (TA) <critical section> (TB) s.signal(); (TB)
TA
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Synchronization with semaphores
73
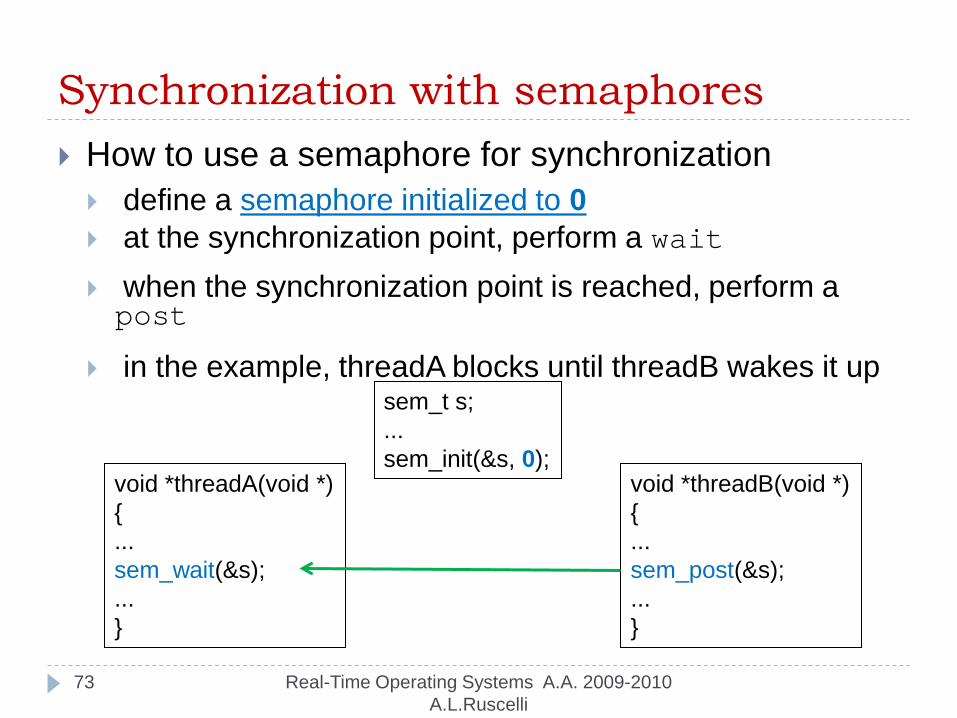
How to use a semaphore for synchronization define a semaphore initialized to 0 at the synchronization point, perform a wait when the synchronization point is reached, perform a post
in the example, threadA blocks until threadB wakes it upsem_t s;...sem_init(&s, 0);
void *threadA(void *){...sem_wait(&s);...}
void *threadB(void *){...sem_post(&s);...}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
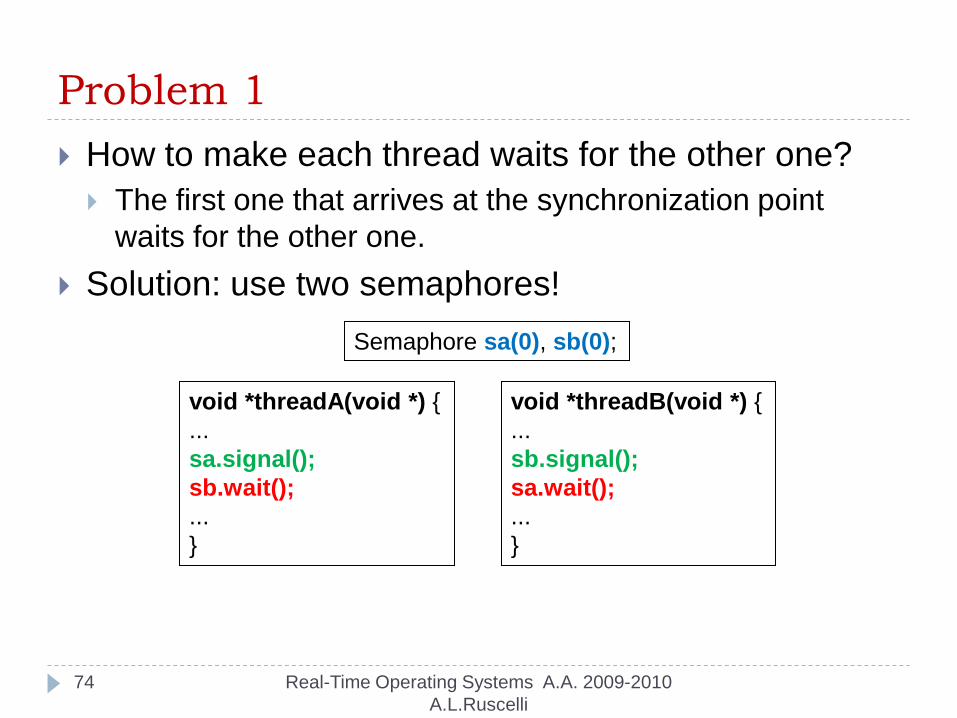
Problem 1
74
How to make each thread waits for the other one? The first one that arrives at the synchronization point
waits for the other one. Solution: use two semaphores!
Semaphore sa(0), sb(0);
void *threadA(void *) {...sa.signal();sb.wait();...}
void *threadB(void *) {...sb.signal();sa.wait();...}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
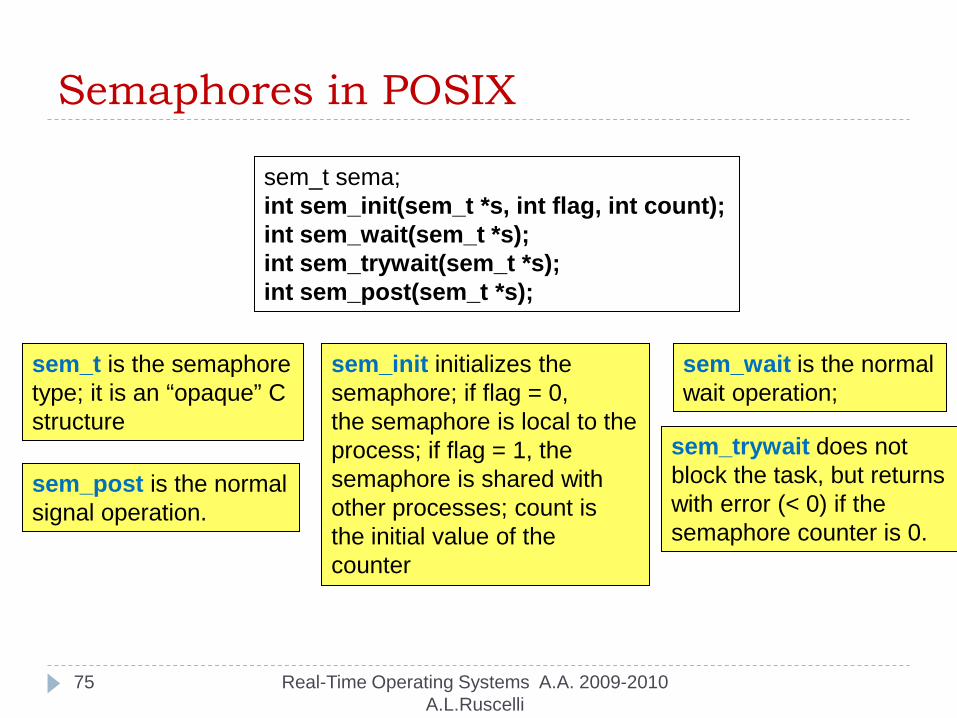
Semaphores in POSIX
75
sem_t sema;int sem_init(sem_t *s, int flag, int count);int sem_wait(sem_t *s);int sem_trywait(sem_t *s);int sem_post(sem_t *s);
sem_t is the semaphoretype; it is an “opaque” Cstructure
sem_init initializes thesemaphore; if flag = 0,the semaphore is local to theprocess; if flag = 1, thesemaphore is shared withother processes; count isthe initial value of thecounter
sem_wait is the normalwait operation;
sem_trywait does notblock the task, but returnswith error (< 0) if thesemaphore counter is 0.
sem_post is the normalsignal operation.
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Producer/consumer
76
Consider a producer/consumer system: now we want to implement a mailbox with a circular array
avoiding busy wait one producer executes insert_CA() the producer must be blocked when the mailbox is full the producer will be unblocked when there is some space again
one consumer executes extract_CA() the consumer must be blocked when the mailbox is empty the consumer will be unblocked when there is one new element
and the queue is not empty We use appropriate semaphores to block these threads Initially we consider only one producer and one
consumer
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
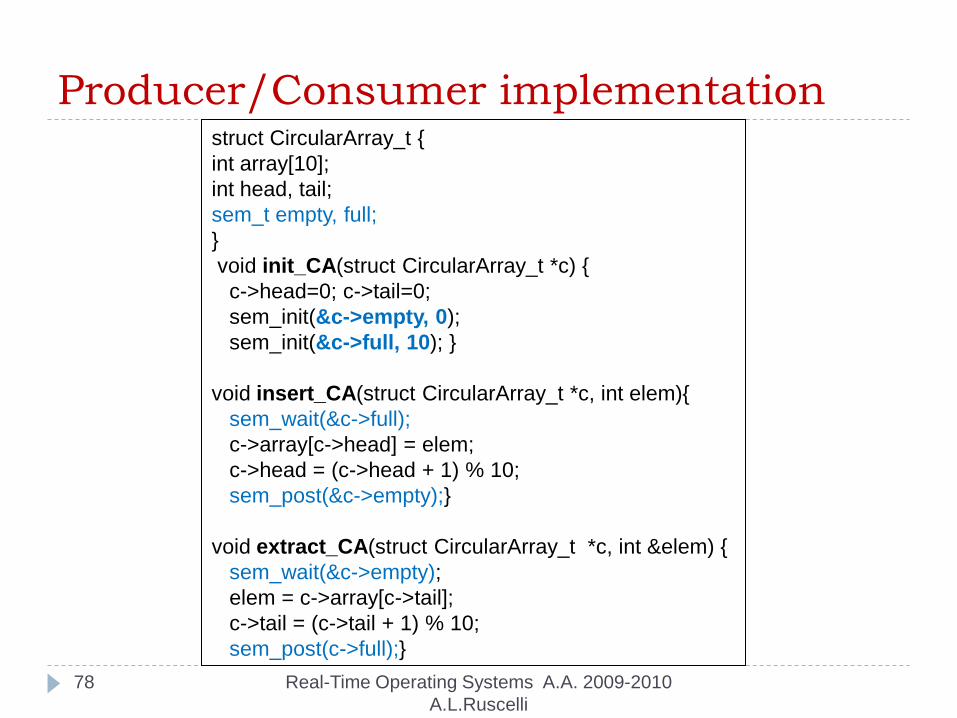
Producer/Consumer implementation
78
struct CircularArray_t {int array[10];int head, tail;sem_t empty, full;}void init_CA(struct CircularArray_t *c) {
c->head=0; c->tail=0;sem_init(&c->empty, 0);sem_init(&c->full, 10); }
void insert_CA(struct CircularArray_t *c, int elem){ sem_wait(&c->full);c->array[c->head] = elem;c->head = (c->head + 1) % 10;sem_post(&c->empty);}
void extract_CA(struct CircularArray_t *c, int &elem) {sem_wait(&c->empty);elem = c->array[c->tail];c->tail = (c->tail + 1) % 10;sem_post(c->full);}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Producer/consumer properties Notice that the value of the counter of empty is the number of
elements in the queue it is the number of times we can call extract without blocking
the value of the counter of full is the complement of the elements in the queue it is the number of times we can call insert without blocking
exercise prove that the implementation is correct
insert_CA() never overwrites elements extract_CA() always gets an element of the queue
79 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Proof of correctness
80
When the number of elements in the queue is between 1 and 9, there is no problem; insert and extract work on different variables (head and tail
respectively) and different elements of the array; The value of full and empty is always greater than 0, so neither
the producer nor the consumer can block; When there is no element in the queue, head = tail, counter of
empty = 0, counter of full = N; If extract begins before the end of insert, it will be blocked After an insert, there is an element in the queue, so we are in the
previous case For symmetry, the same holds in the case of N elements in the
queue. Again, head = tail, counter of empty = N, counter of full = 0; If insert begins before the end of an extract, it will be blocked After an extract, we fall back in the previous case
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Multiple producers/consumers
81
Suppose now there are many producers and many consumers;
All producers will act on the same variable head, and all consumers on the same variable tail;
If one producer preempts another producer, an inconsistency can arise Exercise: prove the above sentence
Therefore, we need to combine synchronization and mutual exclusion we want to implement synchronization we want to protect the data structure
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
First solution
82
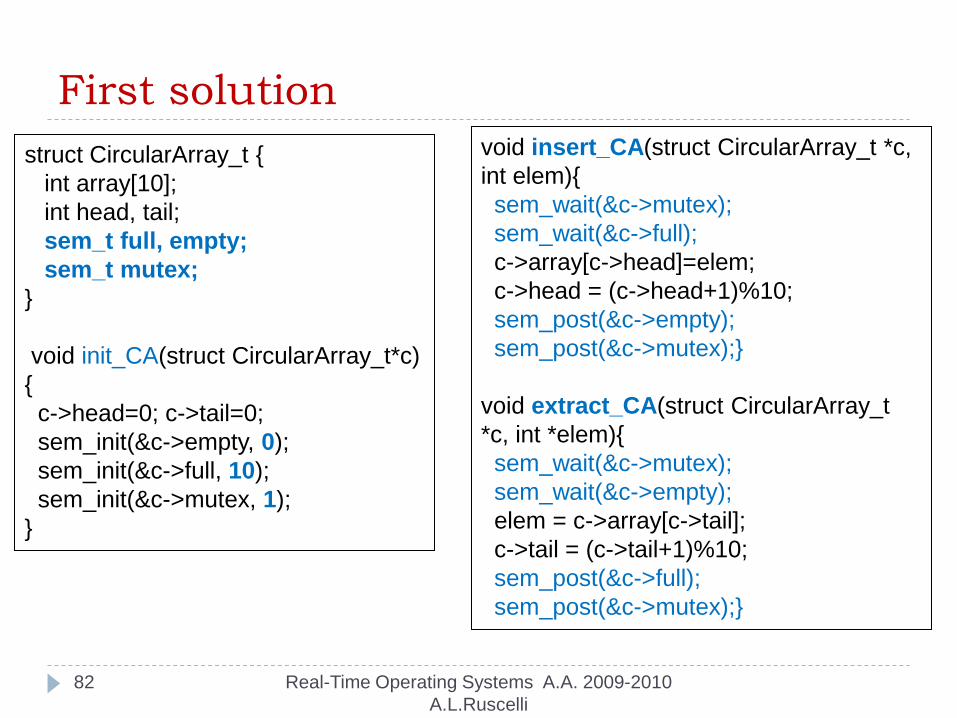
struct CircularArray_t {int array[10];int head, tail;sem_t full, empty;sem_t mutex;
}
void init_CA(struct CircularArray_t*c){c->head=0; c->tail=0;sem_init(&c->empty, 0);sem_init(&c->full, 10);sem_init(&c->mutex, 1);
}
void insert_CA(struct CircularArray_t *c,int elem){sem_wait(&c->mutex);sem_wait(&c->full);c->array[c->head]=elem;c->head = (c->head+1)%10;sem_post(&c->empty);sem_post(&c->mutex);}
void extract_CA(struct CircularArray_t *c, int *elem){sem_wait(&c->mutex);sem_wait(&c->empty);elem = c->array[c->tail];c->tail = (c->tail+1)%10;sem_post(&c->full);sem_post(&c->mutex);}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Wrong solution
83
The previous solution is wrong! Counter example: A consumer thread executes first, locks the mutex and
blocks on the empty semaphore All other threads (producers or consumers) will block on
the mutex Lesson learned: never block inside a mutex!
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Correct solution
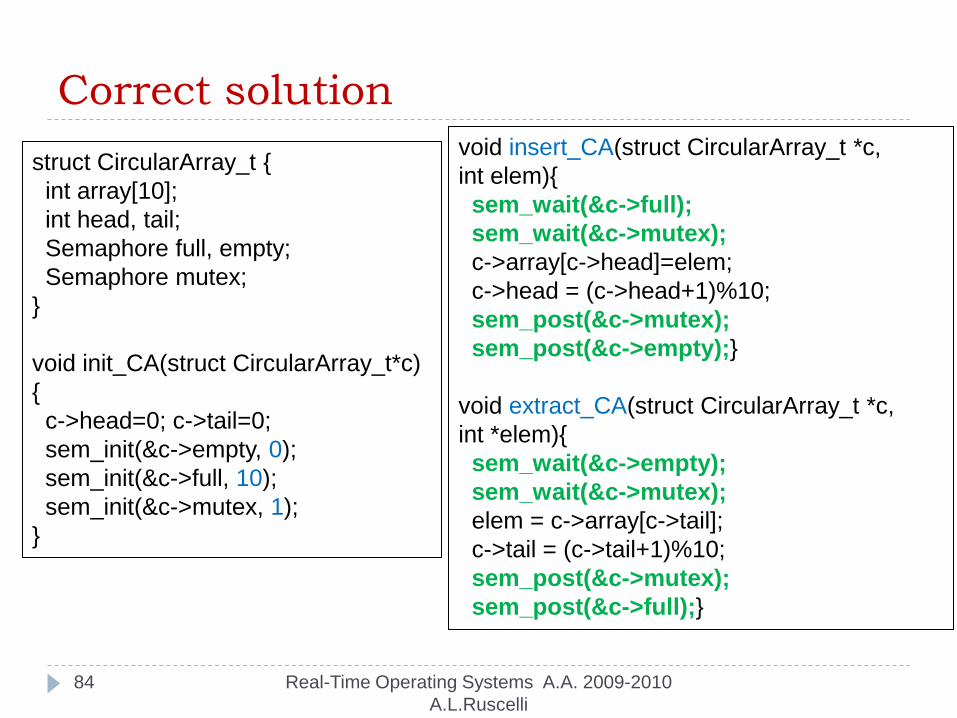
84
struct CircularArray_t {int array[10];int head, tail;Semaphore full, empty;Semaphore mutex;
}
void init_CA(struct CircularArray_t*c){c->head=0; c->tail=0;sem_init(&c->empty, 0); sem_init(&c->full, 10);sem_init(&c->mutex, 1);
}
void insert_CA(struct CircularArray_t *c,int elem){sem_wait(&c->full);sem_wait(&c->mutex);c->array[c->head]=elem;c->head = (c->head+1)%10;sem_post(&c->mutex);sem_post(&c->empty);}
void extract_CA(struct CircularArray_t *c,int *elem){sem_wait(&c->empty);sem_wait(&c->mutex);elem = c->array[c->tail];c->tail = (c->tail+1)%10;sem_post(&c->mutex);sem_post(&c->full);}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Producers/Consumers: deadlock situation Deadlock situation a thread executes sem_wait(&c->mutex) and then blocks on a
synchronisation semaphore to be unblocked another thread must enter a critical section
guarded by the same mutex semaphore! so, the first thread cannot be unblocked and free the mutex! the situation cannot be solved, and the two threads will never
proceed as a rule, never insert a blocking synchronization
inside a critical section!!!
85 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Internal implementation of semaphores
86
wait()and signal()involve a possible thread-switch
therefore they must be implemented as system calls! one blocked thread must be removed from state
RUNNING and be moved in the semaphore blocking queue
a semaphore is itself a shared resource wait()and signal()are critical sections! they must run with interrupt disabled and by using lock() and unlock() primitives
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli

Readers/Writers One shared buffer Readers they read the content of the buffer many readers can read at the same time
Writers they write in the buffer while one writer is writing no other readers or writers
can access the buffer use semaphores to implement the resource
88 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
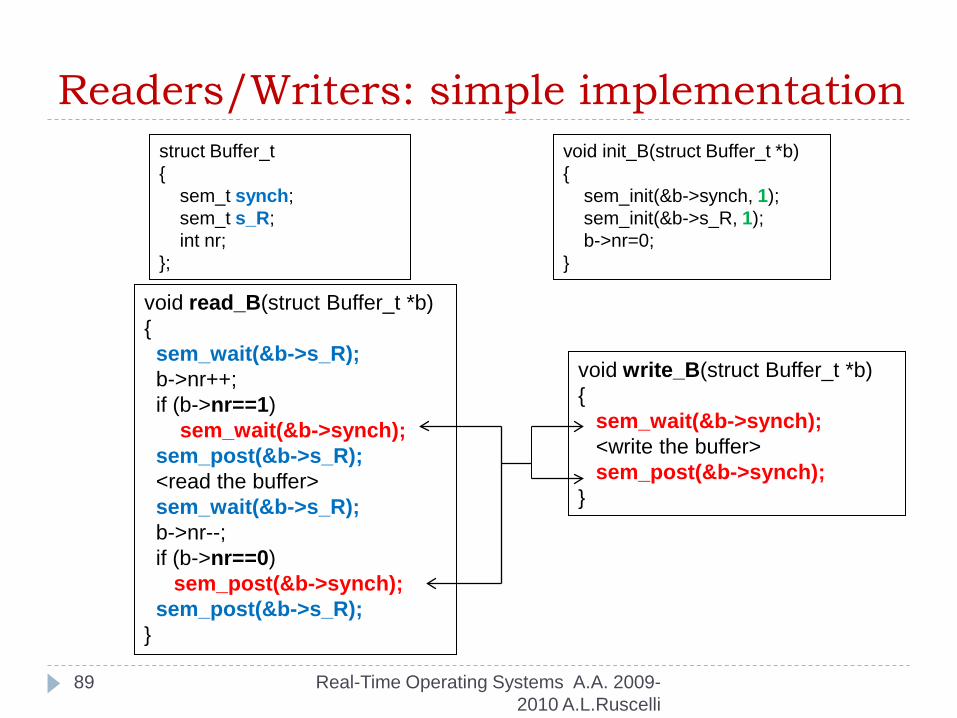
Readers/Writers: simple implementation
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
89
struct Buffer_t{
sem_t synch;sem_t s_R;int nr;
};
void init_B(struct Buffer_t *b){
sem_init(&b->synch, 1); sem_init(&b->s_R, 1); b->nr=0;
}
void read_B(struct Buffer_t *b) {sem_wait(&b->s_R);b->nr++;if (b->nr==1)
sem_wait(&b->synch);sem_post(&b->s_R);<read the buffer>sem_wait(&b->s_R);b->nr--;if (b->nr==0)
sem_post(&b->synch);sem_post(&b->s_R);
}
void write_B(struct Buffer_t *b) {
sem_wait(&b->synch);<write the buffer>sem_post(&b->synch);
}
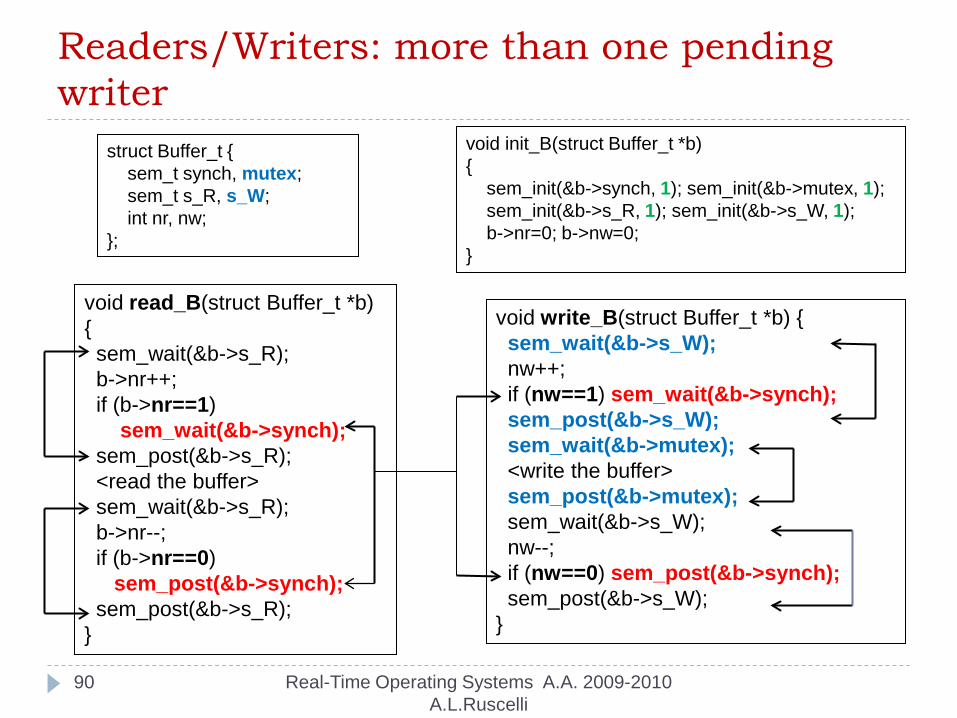
Readers/Writers: more than one pending writer
90
struct Buffer_t {sem_t synch, mutex;sem_t s_R, s_W;int nr, nw;
};
void init_B(struct Buffer_t *b){
sem_init(&b->synch, 1); sem_init(&b->mutex, 1);sem_init(&b->s_R, 1); sem_init(&b->s_W, 1);b->nr=0; b->nw=0;
}
void read_B(struct Buffer_t *b) {sem_wait(&b->s_R);b->nr++;if (b->nr==1)
sem_wait(&b->synch);sem_post(&b->s_R);<read the buffer>sem_wait(&b->s_R);b->nr--;if (b->nr==0)
sem_post(&b->synch);sem_post(&b->s_R);
}
void write_B(struct Buffer_t *b) {sem_wait(&b->s_W);nw++;if (nw==1) sem_wait(&b->synch);sem_post(&b->s_W);sem_wait(&b->mutex);<write the buffer>sem_post(&b->mutex);sem_wait(&b->s_W);nw--;if (nw==0) sem_post(&b->synch);sem_post(&b->s_W);
}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Readers/Writers: starvation A reader will be blocked for a finite time The writer suffers starvation Suppose we have 2 readers (R1 and R2) and 1 writer
W1 and suppose that R1 starts to read while R1 is reading, W1 blocks because it wants to write now R2 starts to read now R1 finishes, but, since R2 is reading, W1 cannot be
unblocked before R2 finishes to read, R1 starts to read again when R2 finishes, W1 cannot be unblocked because R1 is
reading a solution readers should not be counted whenever there is a writer
waiting for them
91 Real-Time Operating Systems A.A. 2009-2010 A.L. Ruscelli

Readers/Writers: priority to writers!
92
struct Buffer_t {sem_t synch, synch1;sem_t s_R, s_W;int nr, nw;
};
void init_B(struct Buffer_t *b) {sem_init(&b->synch, 1); sem_init(&b->synch1, 1);sem_init(&b->s_R, 1); sem_init(&b->s_W, 1);b->nr=0; b->nw=0;
}
void read_B(struct Buffer_t *b) {sem_wait(&b->synch1);sem_wait(&b->s_R);nr++;if (nr==1) sem_wait(&b->synch);sem_post(&b->s_R);sem_post(&b->synch1);<read the buffer>sem_wait(&b->s_R);nr--;if (nr==0) sem_post(&b->synch);sem_post(&b->s_R);
}
void write_B(struct Buffer_t *b) {sem_wait(&b->s_W);nw++;if (nw==1) sem_wait(&b->synch1);sem_post(&b->s_W);sem_wait(&b->synch);<write the buffer>sem_post(&b->synch);sem_wait(&b->s_W);nw--;if (nw == 0) sem_post(&b->synch1);sem_post(&b->s_W);
}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Readers/Writers: problem Now, there is starvation for readers the readers/writers problem can be solved in
general? no starvation for readers no starvation for writers
solution maintain a FIFO ordering with requests
if at least one writer is blocked, every next reader blocks if at least one reader is blocked, every next writer blocks
we can do that using the private semaphorestechnique
93 Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Problem2: Synchronization of N threads
94
Generalize the threads synchronization problem to N threads The first N-1 threads must block waiting for the last one
First solution (more elegant) Second solution (more practical)
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
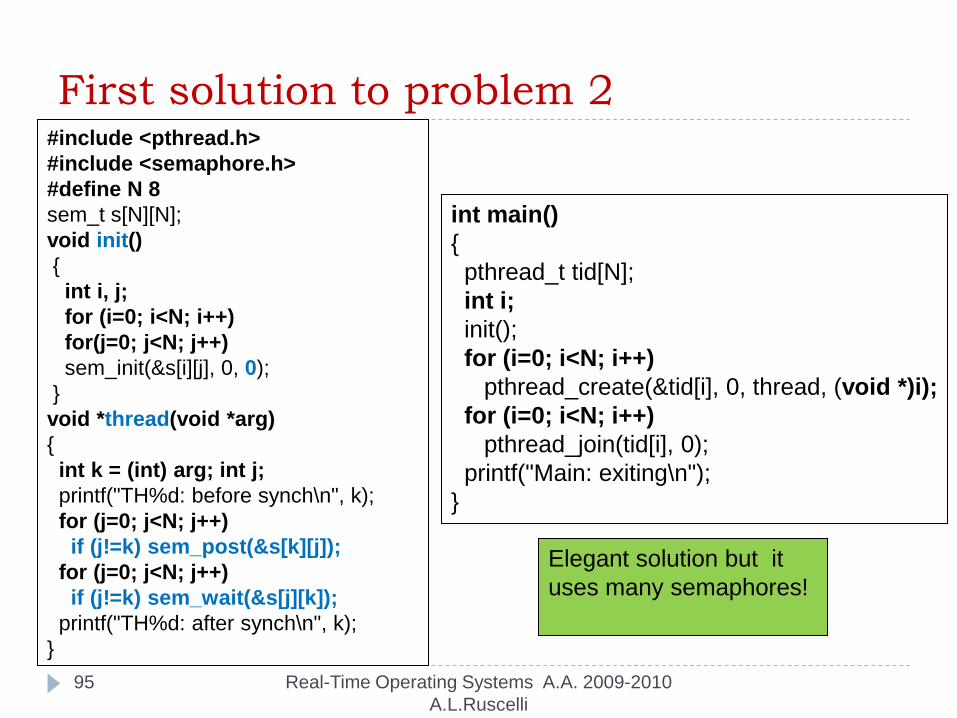
First solution to problem 2
95
#include <pthread.h>#include <semaphore.h>#define N 8sem_t s[N][N];void init(){
int i, j;for (i=0; i<N; i++)for(j=0; j<N; j++)sem_init(&s[i][j], 0, 0);
}void *thread(void *arg){int k = (int) arg; int j;printf("TH%d: before synch\n", k);for (j=0; j<N; j++)
if (j!=k) sem_post(&s[k][j]);for (j=0; j<N; j++)
if (j!=k) sem_wait(&s[j][k]);printf("TH%d: after synch\n", k);
}
int main(){pthread_t tid[N];int i;init();for (i=0; i<N; i++)
pthread_create(&tid[i], 0, thread, (void *)i);for (i=0; i<N; i++)
pthread_join(tid[i], 0);printf("Main: exiting\n");
}
Real-Time Operating Systems A.A. 2009-2010 A.L.Ruscelli
Elegant solution but it uses many semaphores!
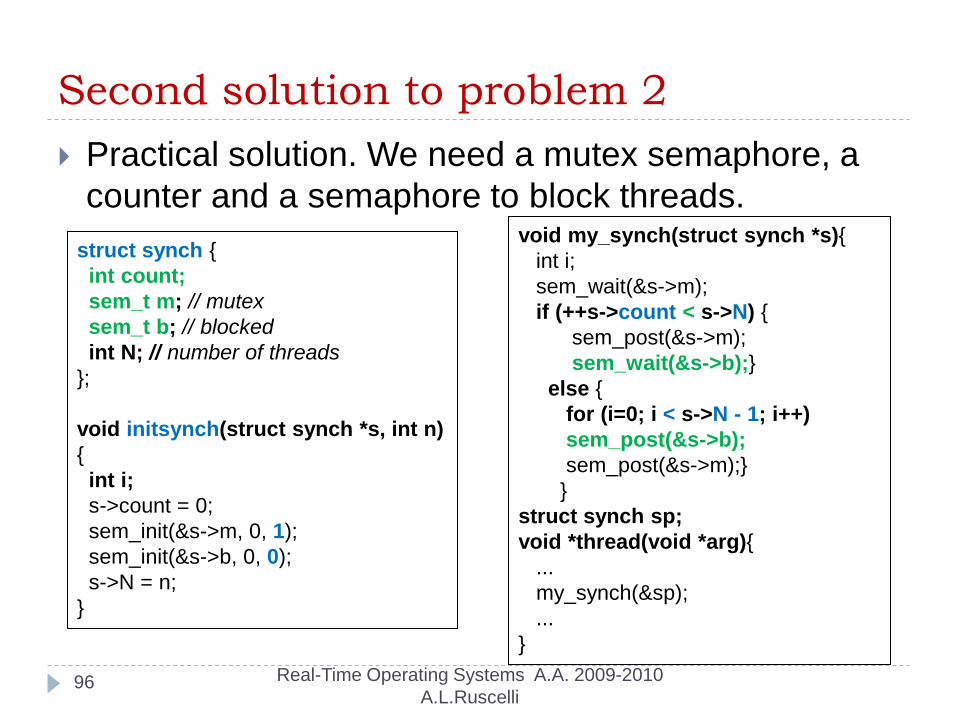
Second solution to problem 2
96
Practical solution. We need a mutex semaphore, a counter and a semaphore to block threads.
struct synch {int count;sem_t m; // mutexsem_t b; // blockedint N; // number of threads
};
void initsynch(struct synch *s, int n){int i;s->count = 0;sem_init(&s->m, 0, 1);sem_init(&s->b, 0, 0);s->N = n;
}
void my_synch(struct synch *s){int i;sem_wait(&s->m);if (++s->count < s->N) {
sem_post(&s->m);sem_wait(&s->b);}
else {for (i=0; i < s->N - 1; i++)sem_post(&s->b);sem_post(&s->m);}
}struct synch sp;void *thread(void *arg){
...my_synch(&sp);...
}Real-Time Operating Systems A.A. 2009-2010
A.L.Ruscelli









![TEMPORAL CONCURRENT CONSTRAINT PROGRAMMING: …fvalenci/papers/journal-ntcc.pdf1.1 Concurrent constraint programming: the ccp model Concurrent constraint programming [Saraswat 1993]](https://static.documents.pub/doc/80x56/5f097f847e708231d4271ca5/temporal-concurrent-constraint-programming-fvalencipapersjournal-ntccpdf-11.jpg)







