Page 1
ROBÓTICA
TRABAJO COLABORATIVO 1
STELLA DIANA RODRIGUEZ RINCÓN, CÓDIGO 52436564
JOHN RICHARD VELÁSQUEZ PRIETO, CÓDIGO
MÜLLER HERNÁNDEZ ROJAS, CÓDIGO 80420611
JUAN SEBASTIÁN CASTRO SOLANO, CÓDIGO
LEONARDO ENRIQUE PATERNINA URIBE, CÓDIGO
GRUPO 299011_5
TUTOR
SANDRA ISABEL VARGAS
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA, UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA
BOGOTÁ
2015
Page 2
Introducción
Este documento presenta los resultados de apropiación del conocimiento propuestos
para la fase uno, y el correspondiente trabajo colaborativo. Las actividades propuestas
corresponden a la realización de una investigación sobre configuración morfológica, fuentes
de almacenamiento, actuadores, sensores y volumen de trabajo de los robots industriales; el
desarrollo de un mapa mental sobre las generalidades de la robótica y la síntesis del artículo
“Robots modulares para cirugía mínimamente invasiva”. El trabajo se realizó basado en los
aportes individuales de todo el grupo colaborativo, las observaciones de la tutora y
compañeros, para terminar consolidando un único trabajo con los mejores aportes realizados.
Page 3
Desarrollo de la Actividad
Configuración morfológica de un robot industrial.
Un robot está compuesto por seis estructuras las cuales contienen:
• Manipulador
• Controlador.
• Sistemas sensoriales
• Elementos terminales
Es una serie de elementos o estructuras unidas mediante articulaciones que permiten
un movimiento consecutivo. La constitución física de la gran parte de los robots industriales
guarda cierta similitud con la anatomía del brazo humano, los elementos que componen el
robot se les denomina en términos como cuerpo, brazo, codo muñeca.
• Manipulador.
Son componentes principales conformando una serie de elementos estructurales
solidos o eslabones unidos mediante articulaciones que permite moverse.
• Controlador.
Es la que regula cada uno de los movimientos manipulador, las acciones, cálculos y
procesado en la información. Controlador recibe y envía a otras máquinas (por media de
señales en entradas y salidas) y almacena programas.
Page 4
• Sistemas sensoriales.
El objetivo de los sensores es permitir que los robots puedan recibir y percibir
información desde el mundo que los rodea. Su función es similar a la de nuestros sentidos,
con el cual logramos luego de un proceso poder interactuar con nuestro medio.
• Elementos terminales.
Los elementos terminales, también llamados efectores finales son los encargados de
interaccionar directamente con el entorno del robot. Pueden ser tanto elementos de
aprehensión como herramientas.
Si bien un mismo robot industrial es, dentro de unos límites lógicos, versátil y
readaptadle a una gran variedad de aplicaciones, no ocurre así con los elementos terminales,
que son en muchos casos específicamente diseñados para cada tipo de trabajo.
Según Borges (2013) un robot está constituido por 6 elementos componentes: estructura
mecánica, transmisiones, sistema de seccionamiento, sistema sensorial, sistema de control,
elementos terminales.
Estructura mecánica de un robot
Un robot está constituido por una serie de elementos o eslabones unidos mediante
articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos.
La constitución física de la gran parte de los robots industriales guarda cierta similitud con la
anatomía del brazo humano, es decir, que poseen ciertas características antropomórficas, por
lo que en ocasiones a los distintos elementos que componen el robot se les denomina en
términos como cuerpo, brazo, codo muñeca. (Borges, 2013)
Page 5
Fig 1. Estructura mecánica de un robot. (Borges, 2013)
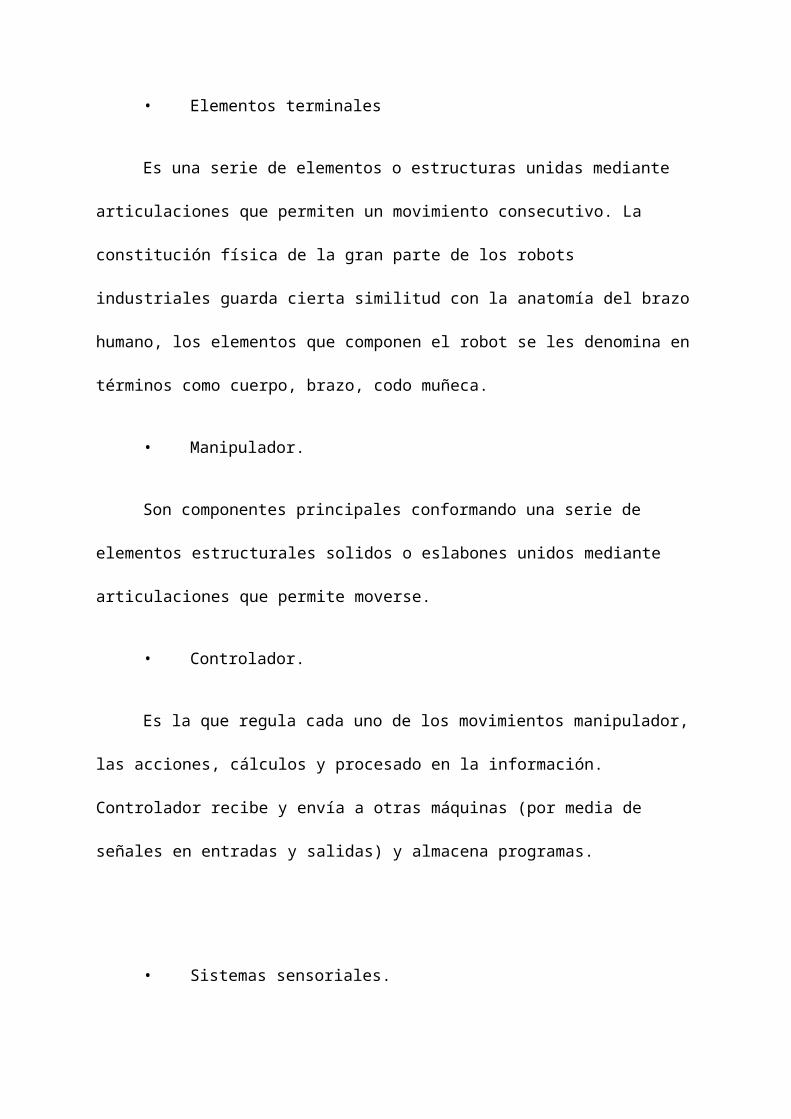
Cada articulación provee al robot de un grado de libertad (GDL), movimientos
independientes que puede realizar cada articulación con respecto a la anterior. El movimiento
de cada articulación puede ser de desplazamiento, de giro o una combinación de ambos. De
este modo son posibles seis tipos diferentes de articulaciones: esférica o rótula (3 GDL),
planar (2 GDL), tornillo (1 GDL), prismática (1 GDL), rotación (1 GDL), cilíndrica (2 GDL)
Aunque en la práctica, en los robots sólo se emplean la de rotación y la prismática.
Fig 2. Articulaciones y grados de movimiento
Page 6
El empleo de diferentes combinaciones de articulaciones en un robot, da lugar a
diferentes configuraciones, con ciertas características tanto en el diseño y construcción del
robot como en su aplicación.
Tipos de configuraciones:
Cuando se habla de la configuración de un robot, se habla de la forma física que se le
ha dado al brazo del robot. El brazo del manipulador puede presentar cuatro configuraciones
clásicas: la cartesiana, la cilíndrica, la polar y la angular:
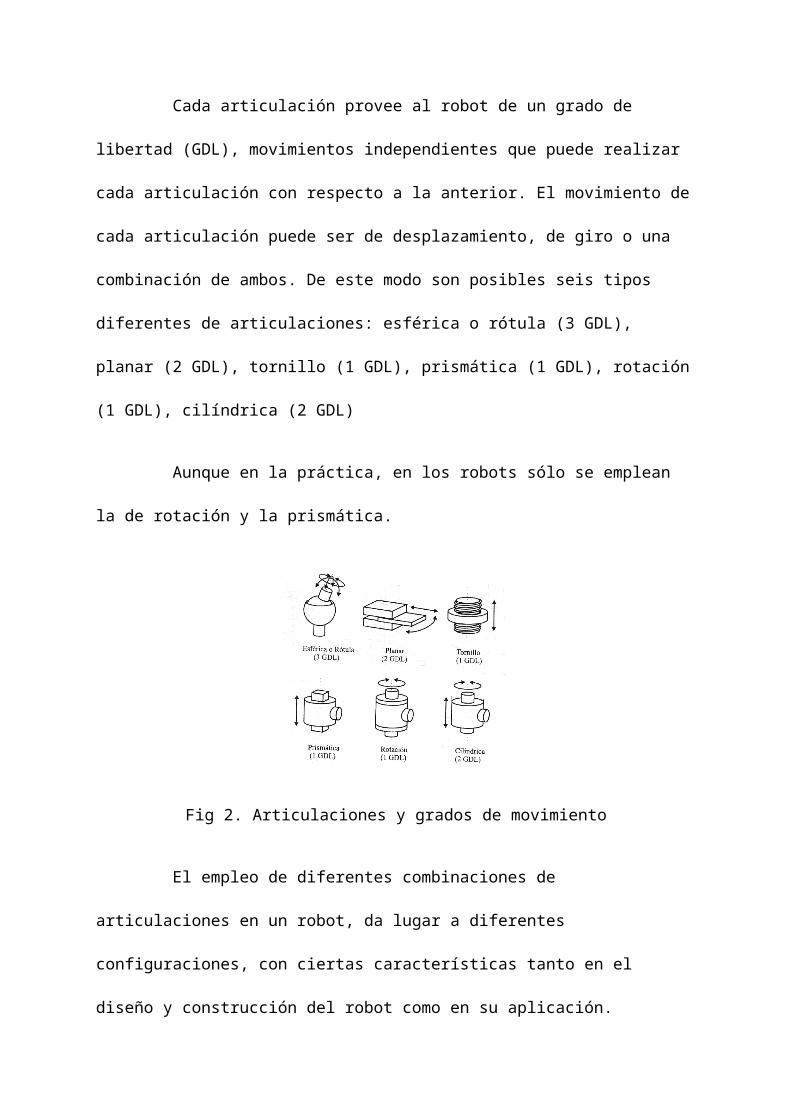
1. Configuración cartesiana: Posee tres movimientos lineales, es decir, tiene tres grados
de libertad, los cuales corresponden a los movimientos localizados en los ejes X, Y y
Z. Los movimientos que realiza este robot entre un punto y otro son con base en
interpolaciones lineales. Interpolación, en este caso, significa el tipo de trayectoria
que realiza el manipulador cuando se desplaza entre un punto y otro. A la trayectoria
realizada en línea recta se le conoce como interpolación lineal y a la trayectoria hecha
de acuerdo con el tipo de movimientos que tienen sus articulaciones se le llama
interpolación por articulación.
Fig 3. Configuración Cartesiana
Page 7
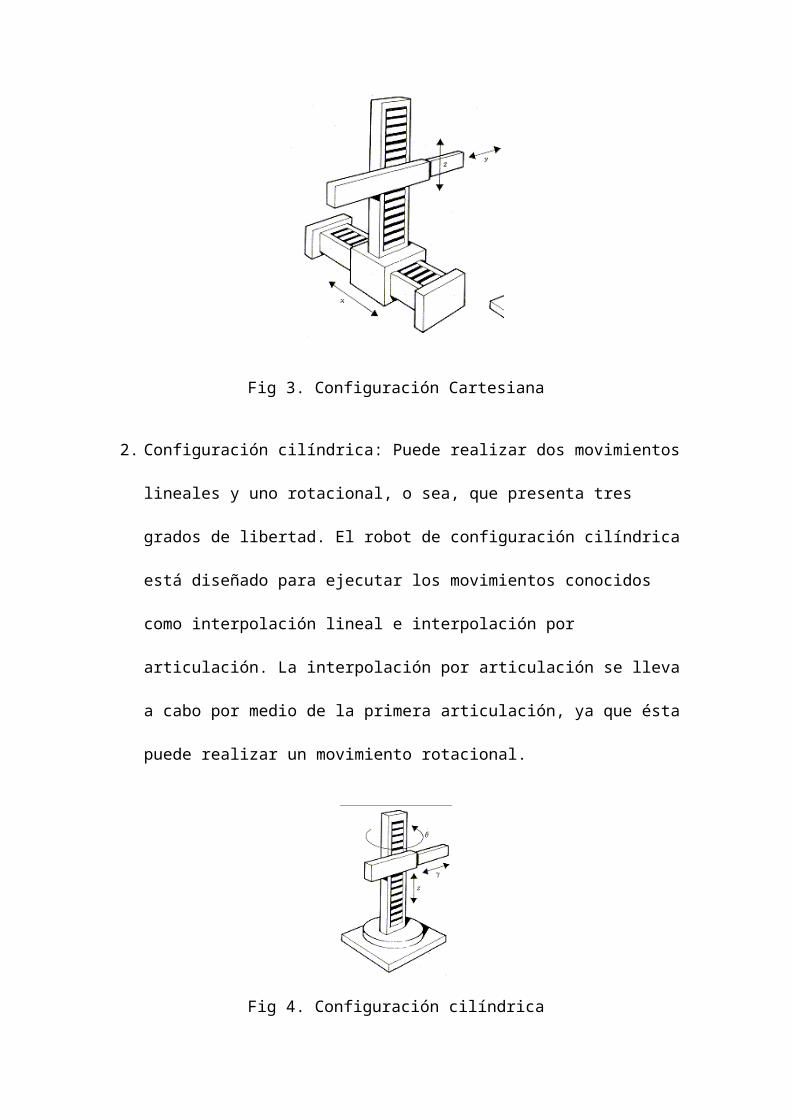
2. Configuración cilíndrica: Puede realizar dos movimientos lineales y uno rotacional, o
sea, que presenta tres grados de libertad. El robot de configuración cilíndrica está
diseñado para ejecutar los movimientos conocidos como interpolación lineal e
interpolación por articulación. La interpolación por articulación se lleva a cabo por
medio de la primera articulación, ya que ésta puede realizar un movimiento
rotacional.
Fig 4. Configuración cilíndrica
3. Configuración polar: Tiene varias articulaciones. Cada una de ellas puede realizar un
movimiento distinto: rotacional, angular y lineal. Este robot utiliza la interpolación
por articulación para moverse en sus dos primeras articulaciones y la interpolación
lineal para la extensión y retracción.
Fig. 5. Configuración Polar
Page 8
4. Configuración angular (o de brazo articulado): Presenta una articulación con
movimiento rotacional y dos angulares. Aunque el brazo articulado puede realizar el
movimiento llamado interpolación lineal (para lo cual requiere mover
simultáneamente dos o tres de sus articulaciones), el movimiento natural es el de
interpolación por articulación, tanto rotacional como angular.
Fig. 6 Configuración angular
Además de las cuatro configuraciones clásicas mencionadas, existen otras
configuraciones llamadas no clásicas. El ejemplo más común de una configuración no clásica
lo representa el robot tipo SCARA. Este brazo puede realizar movimientos horizontales de
mayor alcance debido a sus dos articulaciones rotacionales. El robot de configuración
SCARA también puede hacer un movimiento lineal (mediante su tercera articulación).
Fig. 7. Ejemplo de un robot Scara
Page 9
Fuentes de alimentación para robots.
En un robot autónomo la gestión de la alimentación es fundamental, desde la
generación de energía hasta su consumo, ya que el robot será más autónomo cuanto mejor
gestione su energía. Un robot que no gestione bien su energía se quedará sin alimentación y
no podrá seguir desarrollando la tarea para la que fue desarrollado
Fig. 8 Esquema de alimentación sin gestión de energía
En cualquier robot, necesitaremos una fuente de energía, es una parte fundamental en
cualquier circuito eléctrico. Estas fuentes de energía lo que hacen es provocar una diferencia
de potencial para que los electrones circulen entre sus dos polos, del negativo al positivo. En
el caso de la corriente alterna, simplemente se agitan (van hacia un lado y luego dan la
vuelta).
En un robot autónomo la gestión de la alimentación es fundamental, desde la
generación de energía hasta el suministro, dado que así se reconocerá su autonomía. En la
gestión de la energía de un robot hay varios aspectos a tener en cuenta: las baterías (las tienen
todos los robots), la fuente de alimentación (lo tienen todos los robots) y un módulo de
gestión de energía (hay robots que no lo tienen).
Page 10
Fig. 9 Diagrama de una fuente de alimentación para un robot.
Tensión: varía según la reacción química que se use para generar electricidad. Por
ejemplo, la mayor parte de las celdas alcalinas suelen ser de 1.5 voltios. Mientras que una
batería de un coche tiene seis celdas de 2 voltios cada una.
Capacidad: para un mismo tipo de reacción química cuanto más grande sea una celda,
mayor electricidad será capaz de dar. La capacidad se mide en amperios-hora (Ah), que son
los amperios que la celda puede suministrar en una hora antes de que su tensión baje de un
umbral determinado. Por ejemplo: una batería de 1Ah, funciona durante una hora dando un
amperio, o durante 2 horas dando medio amperio.
Densidad de potencia: es el cociente entre la capacidad y el peso. Depende de la
reacción química interna de la celda y de lo eficiente que sea la misma. Este aspecto es
determinante a la hora de decidir qué batería poner en un robot autónomo. De hecho los
motores y las baterías de un robot son los componentes que más pesan. Si las baterías pesan
mucho se necesitan motores más grandes para poder mover el robot, lo que hace que pese aún
más, por lo que necesitará más energía para poder moverse y así sucesivamente. Cuanto más
grande sea la densidad de potencia, se pueden hacer robots o bien más pequeños, o bien con
más autonomía, lo que remarca el carácter de robots autónomos.
La curva de descarga: cuando una celda se está descargando, su voltaje va bajando
con el paso del tiempo. La curva de descarga varía considerablemente según los tipos de pilas
Page 11
que se usen. Por ejemplo, las celdas alcalinas tienen una curva de descarga muy lineal, lo que
hace muy sencillo determinar cuándo la celda se está debilitando. En cambio las celdas de
Níquel-Cadmio tienen una curva de descarga lineal que de repente cae de forma muy abrupta,
lo que hace que un robot deje de funcionar de forma repentina, sin darle tiempo a dar un
aviso o a ir a un punto de carga.
Resistencia interna: una celda puede ser modelada como una fuente de tensión ideal
con una resistencia en serie. Cuando la celda genera corriente, la tensión de salida cae de
forma proporcional a tensión que cae en su resistencia interna. Esta resistencia es la que
determina la capacidad que tiene una celda de generar energía de forma instantánea. Cuanto
menor sea la resistencia interna, más potencia puede generar la celda. Por lo tanto, una pila
será mejor cuanto menor sea su resistencia interna, pero tienen una desventaja ya que un
cortocircuito hace que la celda sea capaz de generar una elevada corriente que puede llegar a
quemar los cables o a la propia celda. Es necesario tener en cuenta que la celda tiene que ser
capaz de disipar el calor que genera la caída de tensión en su resistencia interna. Por ejemplo,
las celdas de Litio-Polímetro, son las que menos resistencia interna tienen, pero son muy
peligrosas ya que pueden provocar un incendio o una explosión si se tratan mal.
Recargable: es importante saber si una celda es recargable, y si lo es cuántas veces se
puede cargar y si tiene memoria. Se dice que una celda tiene memoria si la celda se va
deteriorando en caso de que no se use en ciclos completos (cargas y descargas completas).
Todas las pilas recargables tienen memoria pero hay unas que tienen más que otras, de forma
que siempre se habla de que las celdas no tienen memoria cuando son las que menos memoria
tienen en ese momento en el mercado. Hace unos años eran las pilas de Níquel Metal-
Hidruro, pero actualmente las celdas que menos memoria tienen son las de Litio-Ion y Litio-
Polímero. En cualquier caso, conviene al menos una vez al año hacer que las celdas hagan un
Page 12
ciclo completo de carga y descarga. Debido a que las celdas son toxicas para el entorno,
conviene usar celdas recargables. El tiempo de carga depende de la capacidad de la pila; por
ejemplo, una pila de 1Ah, tarda una hora en cargarse a 1A, o 2 horas en cargarse a 0.5A.
Como las baterías no mantienen la tensión constate, bien porque se descargan o bien
porque cuando están en carga no son capaces de mantener la tensión, es necesario un módulo
que sea capaz de generar una tensión constante a partir de unas baterías. Eso es lo que se
llama fuente de alimentación de tensión estabilizada. Un módulo de gestión de energía tiene
las siguientes tareas:
Controlar la carga de las baterías de forma óptima. El proceso de carga de las baterías
depende de la reacción química en la que se basen. Para este propósito generalmente existen
circuitos integrados que se encargan de esta labor. En el caso de usar baterías de Litio
Polímero no se recomienda cargar las baterías en este módulo, ya que es tan compleja que
necesita un micro controlador que se encargue de ella.
Monitorizar en todo momento la tensión de cada batería. De esta manera el robot
puede determinar cuándo debe dar una alarma para que se ponga a cargar. En el caso de las
baterías de Litio-Polímero, es obligatorio monitorizar esta tensión de cada celda de la batería,
ya que en ningún caso se debe dejar que alguna de las celdas se quede por debajo de un
mínimo de carga permisible.
Detectar la conexión o desconexión de una fuente de alimentación externa y conmutar
de fuente de energía de forma automática. Es decir, actúa como fuente de alimentación
ininterrumpida. La conmutación de fuente de energía debe hacerse lo suficientemente rápido
como para que el robot no pierda alimentación. Por ello, se debe hacer usando diodos.
Page 13
Actuadores
Corresponden a los elementos que responden a las instrucciones dadas por el sistema
de control del robot para generar los movimientos requeridos. De acuerdo con la fuente de
energía empleada se clasifican en neumáticos, hidráulicos, y eléctricos.
Actuadores neumáticos
Actuadores neumáticos se alimentan empleando aire a presión, el cual es
suministrado mediante unas mangueras al sistema. Las presiones típicas son de 5 a 10 bares.
Entre los actuadores más comunes se encuentran: cilindros y motores
Los actuadores neumáticos se caracterizan por no ser suficientemente precisos, lo que
se relaciona con la compresibilidad del aire. Por esta razón, su empleo solo es recomendable
en aplicaciones donde sea suficiente una configuración todo/nada. (Camargo, 2011)
Actuadores hidráulicos
Los actuadores hidráulicos son similares a los neumáticos en la medida que emplean
un fluido para desplazar los mismos. En este caso, el fluido corresponde a un aceite mineral a
presiones elevadas (las cuales son de 50-100 bares). Los actuadores hidráulicos, sin embargo,
son más precisos que los neumáticos, por lo cual pueden emplearse para tareas en las cuales
se requiera un rango completo de posiciones o valores. Del mismo modo, los actuadores
hidráulicos pueden soportar cargas pesadas y desarrollar un gran par motor. Una desventaja
de los actuadores hidráulicos es la dificultad y complejidad para realizar la instalación de los
sistemas de suministro de fluido. Adicionalmente, las altas presiones generalmente conllevan
riesgos de seguridad en caso de que se presente una ruptura de una manguera de fluido.
(Camargo, 2011)
Page 14
Actuadores eléctricos (Motores)
Estos sistemas emplean electricidad para alimentarse, y son ampliamente utilizados en
la industria, ya que son versátiles, robustos, precisos, y adicionalmente, se pueden
implementar estrategias de control electrónico para mejorar la precisión en los mismos.
Fundamentalmente, existen tres clases de motores:
1. Motores de DC: Son motores que se encuentran alimentados por corriente continua.
Su estructura interna se compone de dos devanados (inductor e inducido), cada uno de
los cuales se ubica en una de las dos partes que componen el motor. El inductor se
ubica en el estator del mismo, y es el devanado que se encuentra conectado a la fuente
de voltaje. El inducido se encuentra conectado a la parte móvil del motor (rotor) y es
aquel que produce el movimiento, en función de la corriente inducida que proviene
del campo generado por el inductor. Usualmente, el control de los motores DC se
hace realimentando el valor de su velocidad a un controlador, el cual realiza las
correcciones efectuadas para ajustarlas al valor deseado. Una aplicación de los
motores DC es la del servomotor, el cual no es sino un motor DC que se encuentra
conectado a un encoder y un sistema de control, con el fin de ubicar el motor de
manera precisa en un valor angular dado.
2. Motor paso a paso. Estos motores, como su nombre lo indica, pueden desplazarse en
un número limitado de pasos a la vez, a medida que se activan de manera secuencial
los devanados correspondientes a cada uno de los pasos del mismo. Usualmente se
emplean en aplicaciones donde se requiere precisión en la posición.
3. Motor AC: Estos motores se caracterizan por alimentarse con corriente alterna en
lugar de corriente continua. La aplicación de los motores de AC es muy reciente, ya
que realizar esquemas de control es más complicado que para los motores DC. Sin
Page 15
embargo, estos motores permiten mayores potencias con menores tamaños, por lo
cual se convierten en una alternativa para aplicaciones de mayor potencia. (Camargo,
2011)
Tabla 1. Características de distintos tipos de actuadores para robots:
Neumático Hidráulico Eléctrico
Energía Aire a presión
(5-10 bar)
Aceite mineral
(50-100 bar)
Corriente eléctrica
Opciones Cilindros
Motor de paletas
Motor de pistón
Cilindros
Motor de paletas
Motor de pistones
axiales
Corriente continua
Corriente alterna
Motor paso a paso
Ventajas Baratos
Rápidos
Sencillos
Robustos
Rápidos
Alta relación potencia-
peso
Auto lubricantes
Alta capacidad de carga
Estabilidad frente a
cargas estáticas
Precisos
Fiables
Fácil control
Sencilla
instalación
Silenciosos
Desventajas Dificultad de
control continuo
Instalación especial
(compresor, filtros)
Ruidoso
Difícil mantenimiento
Instalación especial
(filtros, eliminación de
aire)
Frecuentes fugas
Caros
Potencia limitada
Page 16
El sensor y el transductor.
El sensor es un dispositivo que convierte una señal física en otra señal física distinta,
es decir, convierte un tipo de energía en otro.Las variables de instrumentación pueden ser por
ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación,
desplazamiento, presión, fuerza, torsión, humedad, movimiento, pH, etc. Una magnitud
eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica
(como en un sensor de humedad), una tensión eléctrica (como en un termopar), una corriente
eléctrica (como en un fototransistor), etc.
Un sensor se diferencia de un transductor en que el sensor está siempre en contacto
con la variable de instrumentación con lo que puede decirse también que es un dispositivo
que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la
pueda interpretar otro dispositivo. Como por ejemplo el termómetro de mercurio que
aprovecha la propiedad que posee el mercurio de dilatarse o contraerse por la acción de la
temperatura. Un sensor también puede decirse que es un dispositivo que convierte una forma
de energía en otra.
Los tipos de señales que dan los sensores pueden ser: mecánicas, térmicas,
magnéticas, eléctricas, ópticas y moleculares.
Los sensores se caracterizan por: Sensibilidad de un sensor, suponiendo que es de
entrada a salida y la variación de la magnitud de entrada.
Offset o desviación de cero: valor de la variable de salida cuando la variable de
entrada es nula. Si el rango de medida no llega a valores nulos de la variable de entrada,
habitualmente se establece otro punto de referencia para definir el offset.
Page 17
Linealidad. o correlación lineal. Rango, tiempo de respuesta, exactitud. Resolución.
Mínima variación de la magnitud de entrada que puede detectarse a la salida. Repetitividad.
Error esperado al repetir varias veces la misma medida. Tipo de salida.
Precisión es el error de medida máximo esperado. Rango de medida dominio en la
magnitud medida en el que puede aplicarse el sensor.
Rapidez de respuesta: puede ser un tiempo fijo o depender de cuánto varíe la
magnitud a medir. Depende de la capacidad del sistema para seguir las variaciones de la
magnitud de entrada.
El transductor
Es el dispositivo que transforma la señal que sale del sensor. En otra de tipo eléctrico.
El nombre del transductor ya nos indica cual es la transformación que realiza (por ejemplo
electromecánica, transforma una señal eléctrica en mecánica o viceversa). Es un dispositivo
usado principalmente en la industria, en la medicina interna, en la agricultura, en robótica, en
aeronáutica, etc.
El captador. Es un transductor en el que la señal de salida no es de tipo eléctrico.
También incluye al sensor.
El transmisor. Son los circuitos que transforman la señal que sale del sensor,
transductor o captador y la convierte en señal normalizada.
El regulador optimiza las respuestas.
El comparador. Da una señal comparando la señal de salida y el valor esperado.
Page 18
Las entradas externas. pueden proceder de un ser humano, condiciones de arranque o
alteración del control del proceso, cambio de velocidad, parada de emergencia... , también
pueden medirse determinadas condiciones externas, como presión, temperatura y humedad
del entorno, y ser utilizadas para alterar el proceso de control.
Los términos sensor, captador y transmisor se pueden considerar sinónimos.
Tipos sensores.
Detectores de ultrasonido. Se usan para el control de presencio o ausencia, distancia o
rastreo.
Sensores láser. Tienen la misma función que los sensores de ultrasonidos. Mucho más
precisos que los de ultrasonidos, pero también mucho más caros.
Sensores de interruptor. Se trata de un tipo de sensor sencillo que puede ser interno o
externo. Su principio básico es el de circuito abierto/ cerrado. Son idóneos para aplicaciones
que requieren tamaño reducido, poco peso, repetitividad y larga vida.
Interruptor de final de carrera. Son interruptores que sirven para detectar la posición
de una determinada pieza, de un móvil, etc. .Cuando este alcanza el extremo de su carrera,
actúan mecánicamente sobre una palanca, produciendo el cambio de ciertos contactos
internos. Dependiendo del actuador se dividen en:
Final de carrera de palanca
Final de carrera de émbolo
Final de carrera de varilla.
Page 19
Sensores de caudal de aire. Contienen una estructura de película fina aislada
térmicamente, que contiene elementos sensibles de temperatura y calor.
Sensores de corriente. Monitorizan corriente continua o alterna. Estos sensores pueden
hacer sonar una alarma, arrancar un motor, abrir una válvula, etc. La señal lineal duplica la
forma de la onda de la corriente captada, y puede ser utilizada como un elemento de respuesta
para controlar un motor o regular la cantidad de trabajo que realiza una máquina.
Sensor de posición. Es un sensor sencillo, pasivo e interno que indica la posición en
que se encuentra un objeto. Estos pueden ser rotacionales o traslacionales. Los tipos básicos
son: eléctricos y ópticos.
Sensores de rotación. Miden la rotación angular (odómetro, velocímetro).
Sensores de velocidad. Son sensores internos que miden la velocidad. Los hay
eléctrico y ópticos.
Sensores de aceleración. Miden la aceleración.
Sensores de humedad. Los sensores de humedad y temperatura están configurados con
circuitos integrados que proporcionan una señal acondicionada. Contienen un elemento
sensible capacitivo que intereacciona con electródos de platino.
Sensores de temperatura. Estos sensores consisten en una fina película de resistencia
variable con la temperatura y están calibrados por láser para una mayor precisión, las salidas
lineales son estables y rápidas.
Sensores de turbidez. Aportan una información rápida y práctica de la cantidad de
sólidos en el agua.
Page 20
Sensores de presión y fuerza. Son pequeños, fiables y de bajo coste. Ofrecen una gran
precisión bajo condiciones ambientales variables.
Sensores magnéticos. Se basan en la tecnología magnetoresistiva. Ofrecen una alta
sensibilidad. Tienen multitud de aplicaciones como: brújulas, detección de vehículos,
realidad virtual, sistemas de seguridad.
Sensores de presión. Están basados en tecnología piezoresistiva, combinada con
microcontroladores que proporcionan una alta precisión, independiente de la temperatura, y
de la capacidad de comunicación digital directa con PC. Las aplicaciones son múltiples, se
hacen instrumentos para aviación, laboratorios.
La célula fotoeléctrica. La célula fotoeléctrica consta de un emisor que transmite un
rayo de luz a un emisor. Cuando algo corta el rayo de luz el emisor deja de detectarlo y se
produce la acción que deseemos realizar (abrir o cerrar un circuito). El ejemplo más claro de
célula fotoeléctrica lo podemos encontrar en los ascensores, en los cuales, cuando se corta el
rayo de luz se abre la puerta.
Fotodiodo. El más simple fotodiodo es la unión p-n polarizada inversamente. Cuando
la luz no incide sobre el dispositivo solo una pequeña cantidad de corriente fluye. Cuando la
luz incide, se generan portadores y fluye una mayor corriente eléctrica. Estos dispositivos
presentan una respuesta lineal que se incrementa con la iluminación, y generalmente
presentan una rápida respuesta de tiempo.
Fototransistor. Este dispositivo presenta mayor corriente que un fotodiodo, para
niveles comparables de iluminación. No operan tan rápido como un fotodiodo.
Page 21
Volumen de trabajo
Se define el volumen de trabajo de un robot industrial como aquella parte del espacio
que puede ser alcanzada por el efector final. Dicho de otro modo, aquellas regiones que se
pueden alcanzar para cualquier configuración de movimientos del robot, medidas hasta el
extremo del efector, se consideran parte del espacio o volumen de trabajo.
Los fabricantes generalmente especifican el volumen de trabajo de un robot mediante
diagramas en los cuales ilustran los movimientos de las articulaciones del robot, lo que se
puede apreciar en la Figura 2.
Figura 2. Diagrama ilustrativo de la configuración de movimientos de las
articulaciones del robot industrial IRB-140 de ABB. Fuente: (ABB, 2015)
Page 22
Ocasionalmente, también se especifica el espacio de trabajo de un robot ilustrándolo
mediante diagramas tridimensionales, por ejemplo, como se puede observar en la Figura 3,
tomada de un artículo de investigación sobre obtención del espacio de trabajo (Cao et al,
2011)
Figura 3. Posibles configuraciones para la obtención de modelos tridimensionales del
espacio de trabajo de un robot. Fuente (Cao et al, 2011)
Existen dos clases de configuraciones de espacios o volúmenes de trabajo, de acuerdo
con la configuración geométrica de los mismos. Los espacios de trabajo regulares son
aquellos que corresponden a sólidos geométricos estándares. Por ejemplo, los robots
cartesianos o cilíndricos cuentan con configuraciones regulares. Mientras que los espacios de
trabajo irregulares son aquellos que no presentan una configuración geométrica sencilla de
caracterizar (González, 2003). Un ejemplo son los robots SCARA. La Figura 4 presenta un
ejemplo de volumen regular, mientras que la Figura 5 presenta un volumen irregular.
Page 23
Figura 4. Volumen de trabajo regular. Fuente: (González, 2003)
Figura 5. Volumen de trabajo irregular. Fuente (González, 2003)
Page 24
Mapa conceptual generalidades de la robótica
Page 27
Síntesis
Robots modulares para cirugía mínimamente invasiva
Este artículo presenta el diseño de un sistema robótico modular para la asistencia a la
cirugía laparoscópica. Su propósito es proporcionar una asistencia rápida en un quirófano sin
necesidad de ninguna modificación, y tiene como componente principal un robot
manipulador para el manejo de la cámara laparoscópica de funcionamiento totalmente
inalámbrico gracias a las baterías internas que posee y a un enlace de datos vía radio. Con el
propósito de hacer al sistema manipulador adaptable a diferentes necesidades, su diseño se ha
caracterizado por una acomodación a la posición del paciente.
En el desarrollo de este artículo describen los tres tipos de procedimientos que se
realizan para esta cirugía, estos procedimientos son:
Cirugía abierta tradicional, consiste en una incisión a nivel de la región subcostal
derecha, donde se separan los órganos, para llegar a la vesícula y es extirpada, posteriormente
se cierra la incisión con una sutura o grapas.
El segundo procedimiento se puede realizar a través de una colecistectomía
laparoscópica, donde el cirujano realiza cuatro o cinco incisiones en el abdomen, para
introducir el laparoscopia, las imágenes se ven en un monitor, donde se llega a la vesícula y
es removida. Las incisiones son cerradas con suturas.
El último procedimiento para el cual se han construido diferentes tipos de robots, es la
colecistectomía trans vaginal hibrida donde se realiza a través de una única incisión a nivel
del ombligo y un segundo acceso a través de la vagina, de esta forma llegan hasta el sitio para
extraer la vesícula.
Page 28
Entre las ventajas de esta última cirugía es que busca minimizar el daño del paciente,
reduciendo el número de orificios quirúrgicos, reduciendo el grado de invasión y respetando
aspectos estéticos, lo cual permite una recuperación más rápida del paciente. Esto solamente
está probado en CMI, en caso de ser mayor aún no se han probado.
Los robots quirúrgicos son una alternativa de solución para estas cirugías
mínimamente invasivas, teniendo como ventajas como aumenta la visualización
tridimensional, mejora la visión, mejora el sentido del tacto del cirujano, reduce los temblores
entre otras.
En el artículo presentan diferentes desarrollos de dispositivos robóticos que sirven a
los cirujanos en diferentes procedimientos, entre ellos encontramos robots modulares capaces
de adaptar su forma y función a ambientes y demandas cambiantes, pueden optimizar las
tareas requeridas. Desarrollos que consideran cámaras intra-abdominales y dispositivos
robóticos de imágenes del tracto gastrointestinal.
Entre otros diseños encontramos brazos articulados reducidos, para cirugías de
corazón; robots intrabdominales; microrobots compuestos por unidades magnéticas que se
autoensamblan en el interior del cuerpo humano, para tareas quirúrgicas como extirpar
tejidos, sutura, separación de tejidos, etc..; robot de puerto único para laparoscopia
(SPRINT), teleoperado reproduciendo los movimientos del cirujano; plataforma robótica
insertable con cámara y herramientas quirúrgicas; robots intracraneal para neurocirugías
mínimamente invasivas; entre otros.
También hacen referencia a los dispositivos y materiales quirúrgicos que se requieren
para el diseño de robots modulares, teniendo en cuenta que un robot quirúrgico debe
instalarse en el interior de un paciente, el diseño de este debe realizarse en materiales que no
Page 29
sean dañinos para el paciente, se debe tener en cuenta tanto los efectos del material en el
organismo, como los del organismo en el material.
Para la construcción de robots para cirugías las Directivas de los Dispositivos
Médicos y el GHTF dan aspectos de normatividad para el diseño de dispositivos médicos que
deben ser tomados en cuenta en el diseño de robots modulares reconfigurables para usos
quirúrgicos. Entre los que encontramos: análisis del dispositivo para determinar cuál directriz
o norma es aplicable, identificar la lista de requerimientos esenciales aplicables, identificar
cualquier estándar armonizado, confirmar que el dispositivo cumple con los requerimientos
esenciales o estándares armonizados y documentar la evidencia, clasificar el dispositivo,
decidir sobre el procedimiento de conformidad apropiado, identificar y escoger un cuerpo
notificado, obtener las certificaciones de conformidad y aplicar por la marca de la Comisión
Europea. Los requerimientos generales de los dispositivos deben ser: Debe ser seguro, debe
estar diseñado de tal manera que el riesgo sea eliminado, debe trabajar de acuerdo con las
especificaciones marcadas por el fabricante, debe ser mantenida a lo largo de la vida útil del
producto y cualquier efecto secundario deben ser aceptables con relación a los beneficios.
En conclusión esta clase de robot son los utilizados como dispositivos en las cirugías con
algunas ventajas argumentadas que incitaron su aplicación en numerosos procedimientos
quirúrgicos que abarcan a prácticamente, todas las especialidades quirúrgicas. Su desarrollo
excepcional, fue posible gracias a la permanente evolución del equipamiento y el
instrumental usado en cirugía laparoscópica, los cuales permitieron dar respuestas a las
necesidades de cada técnica quirúrgica. Estos equipos e instrumentos son muy específicos y
requieren de un entrenamiento del cirujano para que el uso de los mismos sea óptimo,
adecuado y eficaz.
Page 31
Referencias bibliográficas
ABB (2015). “Technical data for the IRB 140 industrial robot”. Recuperado el 22 de Agosto
de 2015. URL: http://new.abb.com/products/robotics/industrial-robots/irb-140/irb-140-
data
Borges, Alexander (2013) Tomado el 08 de septiembre de 2015 de:
http://www.industriaynegocios.cl/Academicos/AlexanderBorger/Docts%20Docencia/
Seminario%20de%20Aut/trabajos/2004/Rob%C3%B3tica/seminario
%202004%20robotica/Seminario_Robotica/Documentos/MORFOLOG%C3%8DA
%20DEL%20ROBOT.htm
Camargo, Luis (2011). “299011-Robótica”. Recuperado el 08 de Septiembre de 2015. URL:
http://datateca.unad.edu.co/contenidos/299011/299011_Robotica/Robotica_299011_V2.pd
f
Cao, Yi y colaboradores (2011). “Accurate Numerical Methods for Computing 2D and 3D
Robot Workspace”. Recuperado el 20 de Agosto de 2015. URL:
http://cdn.intechopen.com/pdfs/24606/InTech-
Accurate_numerical_methods_for_computing_2d_and_3d_robot_workspace.pdf
González, Victor (2003). “Estructura de un robot industrial” Recuperado el 19 de Agosto de
2015. URL:http://platea.pntic.mec.es/vgonzale/cyr_0204/ctrl_rob/robotica/sistema/
morfologia.htm#espacio_trabajo
Historia de la robótica profesor Molina.
https://www.google.com.co/url?
sa=t&rct=j&q=&esrc=s&source=web&cd=3&cad=rja&uact=8&ved=0CC4QFjACahU
KEwjGr8WV2ujHAhUCHR4KHbb_BYI&url=http%3A%2F
%2Fwww.profesormolina.com.ar%2Ftecnologia%2Frobotica
Page 32
%2Fhistoria.htm&usg=AFQjCNEW6yAE2-o85R4LrJjx3Ng9X5HtPg&sig2=RpCEZ-
uIPf-6xdAk8OTJ3g
Robótica sistema sensorial.
https://www.google.com.co/url?
sa=t&rct=j&q=&esrc=s&source=web&cd=3&cad=rja&uact=8&ved=0CC4QFjACahUKE
wjGr8WV2ujHAhUCHR4KHbb_BYI&url=http%3A%2F
%2Fwww.profesormolina.com.ar%2Ftecnologia%2Frobotica
%2Fhistoria.htm&usg=AFQjCNEW6yAE2-o85R4LrJjx3Ng9X5HtPg&sig2=RpCEZ-
uIPf-6xdAk8OTJ3g
Fuentes de alimentación para robots.
https://www.google.com.co/url?
sa=t&rct=j&q=&esrc=s&source=web&cd=82&cad=rja&uact=8&ved=0CCEQFjABOFBq
FQoTCNn0uODc6McCFcKyHgodNgADfA&url=http%3A%2F%2Fwww-
pagines.fib.upc.es%2F~rob%2Fprotegit%2Ftreballs%2FQ2_03-04%2Fgeneral
%2Fwhat.htm&usg=AFQjCNEIGST_AcpV7xrDqStIbRKyhLtM2A&sig2=KkGMvHFIfs
acGoGynuvR8w
BIBLIOGRAPHYhttp://informecatronica-robotica.blogspot.com/p/sistemas-sensoriales.html. (s.f.).
SISTEMAS SENSORIALES. Plantilla Awesome Inc.. Con la tecnología de Blogger.
http://www.superrobotica.com/sensores.htm. (2015). sensores. 2015 INTPLUS ®. Todos los
derechos reservados.
www.SuperRobotica.com. (2015). sensores. 2015 INTPLUS ®. Todos los derechos
reservados.