Tema 1. Geometría Diferencial Superficies en el espacio Departamento de Matemática Aplicada E.P.S. Universidad de Málaga 2 o semestre. Curso 2011/2012 Contenidos Definición: superficies regulares Superficies parametrizadas Primera forma fundamental Segunda forma fundamental. Curvatura media y curvatura de Gauss. Definición: superficies regulares Entendemos por superficie regular aquellas que en cada punto existe “sin ambigüedad” un plano tangente a la superficie. Una superficie regular es un subconjunto S no vacío de R 3 en el que en cada punto p 2 S existe un entorno abierto U 3 p en S que es “difeomorfo” a un conjunto abierto de R 2 . v Ejemplos de superficies no regulares Ejemplo: La esfera S 2 es una superficie regular. La proyección estereográfica nos da dos cartas que cubren toda la esfera. y z x N q j (q)
Transcript
Tema 1. Geometría DiferencialSuperficies en el espacio
Departamento de Matemática AplicadaE.P.S.
Universidad de Málaga
2o semestre. Curso 2011/2012
Contenidos
Definición: superficies regulares
Superficies parametrizadas
Primera forma fundamental
Segunda forma fundamental. Curvatura media y curvatura deGauss.
Definición: superficies regulares
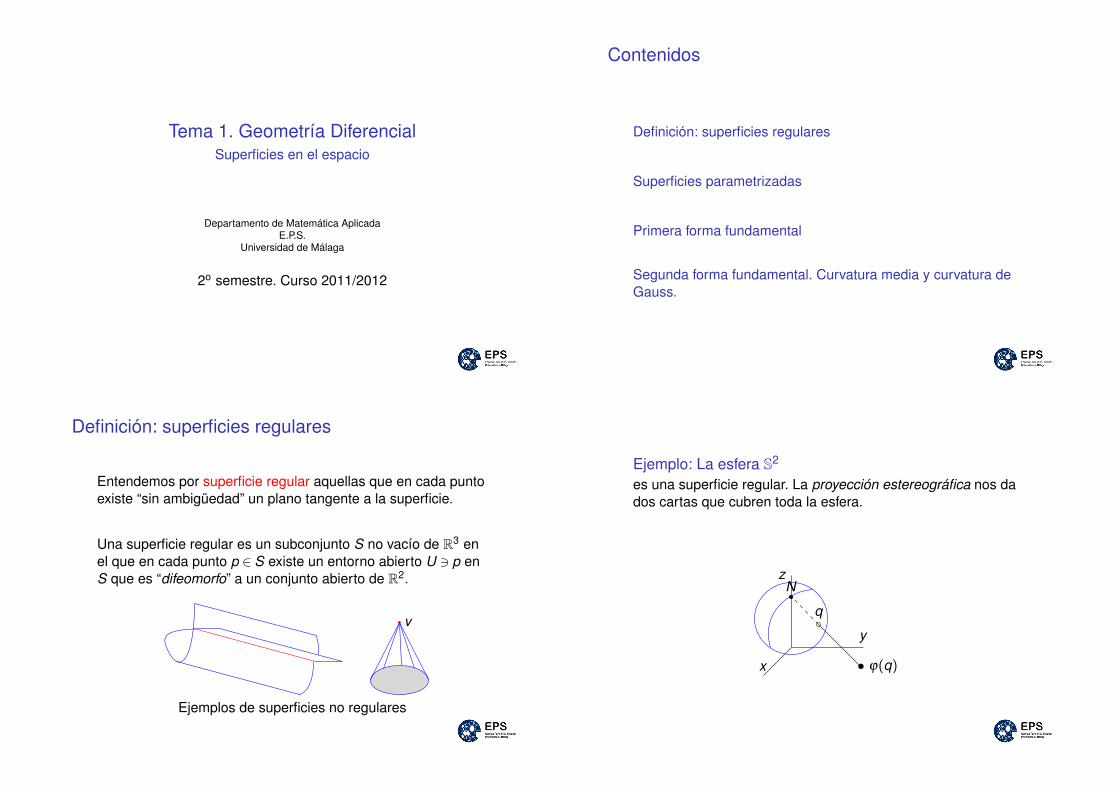
Entendemos por superficie regular aquellas que en cada puntoexiste “sin ambigüedad” un plano tangente a la superficie.
Una superficie regular es un subconjunto S no vacío de R3 enel que en cada punto p 2 S existe un entorno abierto U 3 p enS que es “difeomorfo” a un conjunto abierto de R2.
v
Ejemplos de superficies no regulares
Ejemplo: La esfera S2
es una superficie regular. La proyección estereográfica nos dados cartas que cubren toda la esfera.
y
z
x
N
q
j(q)
Dada F : U ✓ Rn ! Rm, decimos que1. p 2 U es un punto crítico o singular si dFp : Rn ! Rm no
es sobreyectiva (es decir, la diferencial dFp se anula).2. La imagen F (p) de un punto crítico se llama valor crítico.3. Si p no es un punto crítico se dice que es punto regular.4. La imagen F (p) de un punto regular se llama valor
regular.
ProposiciónSi f : U ✓ R3 ! R es una función diferenciable en U y a 2 f (U)es un valor regular de f , entones el conjunto
S = f�1(a) = {(x ,y ,z) 2 U | f (x ,y ,z) = a}
es una superficie regular de R3.
Ejemplo
Los elipsoidesx2
a2 +y2
b2 +z2
c2 = 1 son superficies regulares.
(En particular la esfera S2 es una superficie regular.)
1. Si consideramos la función F (x ,y ,z) =x2
a2 +y2
b2 +z2
c2 es
claro que el elipsoide es F�1(1).2. La diferencial de F en el punto p = (x ,y ,z) es
dFp = (Fx ,Fy ,Fz) =
✓2xa2 ,
2yb2 ,
2zc2
◆
luego el único punto singular es (0,0,0) que no pertenecea F�1(1).
Superficies parametrizadas
Una parametrización de S es una función � : V ✓ R2 ! R3
�(u,v) = (x(u,v),y(u,v),z(u,v))
tal que su diferencial d�q : R2 ! R3 sea inyectiva.
En cada punto q = (u,v) 2 V d�q =
0
BBBBB@
∂x(u,v)∂u
∂x(u,v)∂v
∂y(u,v)∂u
∂y(u,v)∂v
∂z(u,v)∂u
∂z(u,v)∂v
1
CCCCCA
tiene sus vectores columnas linealmente independientes.
�u =∂�∂u
=
✓∂x∂u
,∂y∂u
,∂z∂u
◆y �v =
∂�∂v
=
✓∂x∂v
,∂y∂v
,∂z∂u
◆
La esfera S2(r)se puede parametrizar como
�(q ,j) = (r senq cosj, r senq senj, r cosq)
siendo (q ,j) 2 (0,p)⇥ (0,2p).
El paraboloidees la gráfica de la funciónf (x ,y) = x2 +y2. Se parametriza:
�(u,v) = (u,v ,u2 +v2); (u,v) 2 R2
Curvas Coordenadas
Podemos considerar curvas sobre S obtenidas fijando v = v0 yvariando u, llamadas u-curvas, ó fijando u = u0 y variando v ,llamadas v-curvas. Se tiene
~x(u,v0) : I �! R3
u �!~x(u,v0),
~x(u0,v) : J �! R3
v �!~x(u0,v).
Estas curvas son conocidas como curvas coordenadas y paraconstituyen una red de curvas que barren la superficie S. Enlas superficies de revolución las curvas coordenadas son losmeridianos y los paralelos.
Superficies de revolución
Es la que se describe en el espacio a partir de una curvaregular plana rotada por un eje.Si x = f (t),z = g(t) con t 2 (a,b) es la curva está definida en elsemiplano xz, y hacemos girar el eje z la superficieparametriza como
x(u,v) = f (u)cosvy(u,v) = f (u)senvz(u,v) = g(u)
(u,v) 2 (a,b)⇥ (0,2p)
El toro bidimensional T2 (mal llamado “donut”) se puededefinir como la superficie de revolución obtenida a partir de unacircunferencia de radio r en el plano xz y centrada en el punto(R,0,0), siendo R > r . Como la circunferencia se puedeparametrizar de la forma x(t) = R+ r cosq ; z(t) = R+senq ,con q 2 (0,2p), entonces una parametrización del toro será lasiguiente:
x(q ,j) = (R+ r cosq)cosjy(q ,j) = (R+ r cosq)senjz(q ,j) = r senq
Plano TangenteDada una parametrización regular los vectores~xu(u0,v0),~xv (u0,v0), forman una base del plano tangente a la superficieen P, siendo~n =~xu ⇥~xv 6=~0 un vector normal, por lo que laecuación del plano tangente es ((x ,y ,z)�P) ·~n = 0
Ejercicios de Plano Tangente
EjercicioCalcula el plano tangente de la esfera S2 en el polo Norte.
EjercicioCalcula los planos tangentes al paraboloide z = x2 +y2 enalgunos puntos.
Parametrización de la gráfica de una función
EjemploLa gráfica de una función
f : D �! R(x ,y) �! z = f (x ,y)
se parametriza mediante~x(u,v) = (u,v , f (u,v)). Nótese que
~xu ⇥~xv = (�fu,�fv ,1) 6=~0,
así, esta parametrización es siempre regular. Siendo el planotangente en el punto (x0,y0,z0):
z �z0 = fu(u0,v0)(x �u0)+ fv (u0,v0)(y �v0)
Parametrización de una Esfera
EjemploLa parametrización standard de la esfera unidad S2 viene dadapor las coordenadas esféricas (q ,j)
Por tanto, la parametrización es regular. Las q -curvas son lascurvas de latitud sobre la esfera y las j-curvas son las delongitud.
Orientación
DefiniciónDecimos que una superficie es orientable si podemosasignar, de manera continua, a cada punto de la superficie unvector normal unitario. En una superficie orientable habrá dosorientaciones y para fijarla elegimos uno de los dos vectoresnormales unitarios en un punto concreto de la superficie.
EjemploSi tomamos en la esfera el vector normal que apunta hacia elorigen se obtiene la orientación según el normal interior. Laotra posibilidad es la orientación según el normal exterior. Unasuperficie plana está orientada hacia arriba cuando la terceracomponente del vector normal es positiva.
Superficies no orientables
La cinta de Möbius
Superficies no orientables
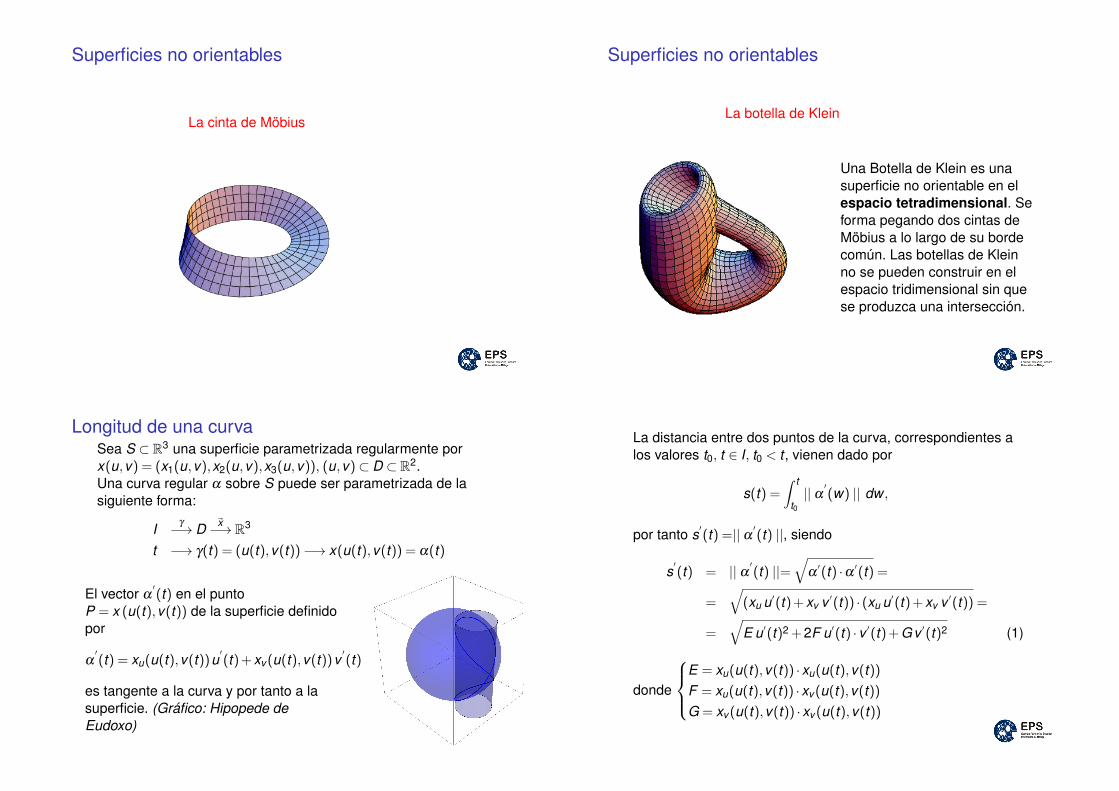
La botella de Klein
Una Botella de Klein es unasuperficie no orientable en elespacio tetradimensional. Seforma pegando dos cintas deMöbius a lo largo de su bordecomún. Las botellas de Kleinno se pueden construir en elespacio tridimensional sin quese produzca una intersección.
Longitud de una curvaSea S ⇢ R3 una superficie parametrizada regularmente porx(u,v) = (x1(u,v),x2(u,v),x3(u,v)), (u,v)⇢ D ⇢ R2.Una curva regular a sobre S puede ser parametrizada de lasiguiente forma:
I g�! D ~x�! R3
t �! g(t) = (u(t),v(t))�! x(u(t),v(t)) = a(t)
El vector a 0(t) en el punto
P = x (u(t),v(t)) de la superficie definidopor
a 0(t) = xu(u(t),v(t))u
0(t)+xv (u(t),v(t))v
0(t)
es tangente a la curva y por tanto a lasuperficie. (Gráfico: Hipopede deEudoxo)
La distancia entre dos puntos de la curva, correspondientes alos valores t0, t 2 I, t0 < t , vienen dado por
s(t) =Z t
t0|| a 0
(w) || dw ,
por tanto s0(t) =|| a 0
(t) ||, siendo
s0(t) = || a 0
(t) ||=q
a 0(t) ·a 0(t) =
=q
(xu u0(t)+xv v 0(t)) · (xu u0(t)+xv v 0(t)) =
=q
E u0(t)2 +2F u0(t) ·v 0(t)+Gv 0(t)2 (1)
donde
8><
>:
E = xu(u(t),v(t)) ·xu(u(t),v(t))F = xu(u(t),v(t)) ·xv (u(t),v(t))G = xv (u(t),v(t)) ·xv (u(t),v(t))
Así
s(t) =Z t
t0
qE u0(w)2 +2F u0(w) ·v 0(w)+Gv 0(w)2 dw
Teniendo en cuenta que ds(t) = s0(t)dt . La expresión (1) se
puede escribir en la siguiente forma
ds2 = E du2 +2F dudv +Gdv2 ⌘ (E du+F dv)2
E+
EG�F 2
Edv2 (2)
conEG�F 2 = (~xu ·~xu)(~xv ·~xv )� (~xu ·~xv )2 = (~xu ⇥~xv ) · (~xu ⇥~xv )> 0,siendo (2) la primera forma fundamental.
La primera forma fundamental se denota con I, y se tiene
(du,dv)✓
E FF G
◆✓dudv
◆= E du2 +2F dudv +Gdv2
La matriz asociada a la primera forma fundamental también serepresenta por I
I =✓
E FF G
◆=
✓xu ·xu xu ·xvxv ·xu xv ·xv
◆
EjemploCalcúlese la primera forma fundamental del cilindro x2+y2 = 1.
SoluciónParametrizamos la superficie cilíndrica:
x = cosqy = senqz = t
donde 0 q < 2p,�• < t < • 1
1Nótese que en este ejemplo D = [0,2p)⇥R no es abierto
Soluciónpor tanto~x(q , t) = (cosq ,senq , t), de donde
Cuando, a continuación, se establezca el ángulo entre curvascoordenadas, nótese que al ser F = 0 las curvas coordenadasson ortogonales. Lo cual era evidente puesto que las q -curvas(t=cte) son circunferencias sobre el cilindro paralelas al planoZ = 0, y las t-curvas (q = cte) son rectas sobre el cilindro(perpendiculares al plano Z = 0).
Mediante E , F y G podemos hallar el ángulo que forman doscurvas sobre la superficie. Concretamente, sean las curvasa, b : I �! R3 tal que
I g1�! D ~x�! R3
t �! g1(t) = (u1(t),v1(t))�!~x(u1(t),v1(t)) = a(t)
I g2�! D ~x�! R3
t �! g2(t) = (u2(t),v2(t))�!~x(u2(t),v2(t)) = b (t)
Sea~x(u0,v0) el punto de intersección de ambas curvas:a(t0) =~x(u0,v0) =~x(u1(t0),v1(t0)) =~x(u2(t0),v2(t0)) = b (t0).
Se comprueba sin dificultad que el ángulo que forman dichascurvas en su punto de intersección, es decir, el ángulo queforman sus respectivos vectores tangentes en ese punto vienedado por
cosj =a 0
(t0) ·b0(t0)
|| a 0 (t0) || · || b 0 (t0) ||=
=E u0
1(t0)u02(t0)+F
⇣u0
1(t0)v02(t0)+u0
2(t0)v01(t0)
⌘+Gv 0
1(t0)v02(t0)q
E u01(t0)2 +2F u0
1(t0)v01(t0)+Gv 0
1(t0)2 ·q
E u02(t0)2 +2F u0
2(t0)v02(t0)+Gv 0
2(t0)2(3)
donde E , F y G están evaluadas en (u0,v0).
Son particularmente importantes los siguientes casos de laigualdad (3)
1. Para j = p2 se tiene la siguiente condición de
ortogonalidad de dos curvas sobre la superficie en unpunto
E u0
1(t0)u0
2(t0)+F⇣
u0
1(t0)v0
2(t0)+u0
2(t0)v0
1(t0)⌘+Gv
0
1(t0)v0
2(t0) = 0
2. El ángulo j formado por las curvas coordenadas, es decir,u1 = u, v1 = cte y u2 = cte, v2 = v
cosj =FpEG
senj =
pEG�F 2p
EG
3. Las curvas coordenadas son ortogonales si F = 0.
Segunda forma fundamental
DefiniciónLa segunda forma fundamentalpuede obtenerse tomando sobrela superficie una curva C que pasepor un punto P.Si T es el vector tangente unitarioa la curva y la curva estáparametrizada respecto de lalongitud de arco, el vectorcurvatura es dT
ds =~k. Sea~n elvector normal unitario a lasuperficie en P.La proyección kn de ~k sobre larecta normal a la superficie en elpunto P se llama curvaturanormal.
7
7
N
N
El vector ~kn queda determinado por la curva C (no depende laelección del sentido de T o~n) pero el escalar kn depende, encuanto a su signo, del sentido de~n. Como T está en el planotangente entonces~n ·~T = 0.El vector~n, normal a la superficie, lo consideraremosrestringido a los puntos de la curva, es decir,~n(s) =~n(u(s),v(s)) siendo la curva C parametrizada por~x =~x(u(s),v(s)).
donde e =�~xu ·~nu, 2f =�(~xu ·~nv +~xv ·~nu), g =�~xv ·~nv , siendo
�d~x d~n = edu2 +2f dudv +g dv2 la segunda forma fundamental.
Los valores e, f y g se pueden escribir en la forma8><
>:
e =~xuu ·~nf =~xuv ·~ng =~xvv ·~n
La expresión anterior se puede poner en forma matricial:
(du,dv)✓
e ff g
◆✓dudv
◆= edu2 +2f dudv +g dv2
La segunda forma fundamental, y la matriz asociada, lasrepresentamos con II.
Puesto que~n es perpendicular a~xu y a~xv se tiene
II =✓
e ff g
◆=
✓~xuu ·~n ~xuv ·~n~xvu ·~n ~xvv ·~n
◆=�
✓~xu ·~nu ~xu ·~nv~xv ·~nu ~xv ·~nv
◆
La curvatura normal sólo depende del vector tangente
Fijado un punto P de la superficie, como
kn =edu2 +2f dudv +g dv2
E du2 +2F dudv +Gdv2
y los coeficientes (E , F , G, e, f , g) sólo dependen del punto P,resulta que cualquier otra curva con el mismo vector tangente~v = (du,dv) tiene la misma curvatura normal.
Sección normal en una dirección tangente
Para calcular la curvatura normal en una dirección ~v podemostomar la sección normal en la dirección de ~v , que es la curvaintersección de la superficie con el plano normal que contienea ~v .El vector normal a dicha curva es paralelo al vector normal a lasuperficie, de ahí que ambos tipos de curvatura sean iguales silos normales tienen el mismo sentido, u opuestas en otro caso.
Ejemplo de sección normal
EjemploEn el cilindro x2 +y2 = R2 la curvatura en la dirección de lageneratriz es 0 ya que la sección normal en dicha dirección esjustamente la generatriz y una recta tiene curvatura nula.
EjemploEn una esfera las sección normal en cualquier direccióntangente es un círculo máximo y por tanto la curvatura normales 1
R siendo R el radio de la esfera
Curvaturas y direcciones principales
Estamos interesados en estudiar, fijado P sobre la superficie,los valores máximos y mínimos de kn.Las direcciones en las que se dan los valores máximos ymínimos de kn se llaman direcciones principales y lascurvaturas correspondientes curvaturas principales.Las direcciones principales son perpendiculares entre sí ycoinciden con los autovectores de la matriz A = I�1II, siendo I yII las matrices de la primera y segunda forma fundamental.
A =
✓E FF G
◆�1✓ e ff g
◆
las curvaturas principales, esdecir máxima y mínima, son losautovalores de A.
TeoremaEn cada punto P de una superficie de revolución lasdirecciones principales coinciden con las direcciones de losmeridianos y paralelos que pasan por P. Por tanto lascurvaturas principales son las de los meridianos y paralelos.Observación: Si las curvaturas principales son igualesentonces cualquier dirección es principal.
EjemploEn un cilindro las direcciones principales son la dirección de lageneratriz y la perpendicular a ella, y por tanto las curvaturasprincipales valen 0 y 1/R respectivamente siendo R el radio delcilindro.
Curvaturas media y de Gauss
Fijado un punto P de la superficie sean k1 y k2 las curvaturasmáximas y mínimas. Entonces:
I Llamamos curvatura media a M = 12(k1 +k2),
I Llamamos curvatura de Gauss a K = k1 ·k2
Se obtiene que M es la mitad de la traza de A, y K es eldeterminante de A.
M =E g�2f F +eG
2(E G�F 2)
K =eg� f 2
E G�F 2 .
EjemploLa curvatura de Gauss de una esfera es 1
R2 y su curvaturamedia 1
R . La curvatura de Gauss de un cilindro de radio R escero y la curvatura media es 1
2R . Para un cono, en la direcciónprincipal del meridiano, que es la recta generatriz, la curvaturaprincipal k2 es cero, pero en la dirección del paralelo la curvasección normal no es el paralelo del cono, por lo que esnecesario realizar cálculos adicionales o aplicar otros teoremaspara calcular esta curvatura principal.
Aplicación de Gauss
En cada punto p de una superficie S parametrizada por �(u,v)tenemos el vector normal unitario
N(p) =�u ^�v
k�u ^�vkp
N(p)
Si S es una superficie regular orientable, a la función
N : S ! S2 ✓ R3
que a cada punto le asigna el vector unitario normal N(p) esuna aplicación diferenciable llamada aplicación de Gauss.
Endomorfismo de Weingarten
TeoremaLa diferencial de la aplicación de Gauss
dNp : Tp(S)! TN(p)(S2)⇡ Tp(S)
es una aplicación lineal llamada endomorfismo de Weingarten.La matriz asociada a �dNp en la base {�u,�v} es A = I�1 · II
Las derivadas parciales Nu = dNp(�u), Nv = dNp(�v )cumplen:
Sea p un punto de una superficie regular S y sea Kp lacurvatura de Gauss en dicho punto. Podemos clasificarlo como:Un punto elíptico Si Kp > 0.Un punto parabólico Si Kp = 0 con dNp 6= 0.Un punto hiperbólico Si Kp < 0.Un punto llano Si dNp = 0.
Definición (Curvatura normal)Llamaremos curvatura normal en un punto p en una direcciónunitaria ~u 2 Tp(S) al número IIp(~u) = kn(p).
Definición (Dirección asintótica)Diremos que una dirección es asintótica en p 2 S si kn(p) = 0.Las curvas en S que contienen a p son asintóticas si su rectatangente define una dirección asintótica.
EjercicioCalcula la primera y la segunda forma fundamental, así comoel endomorfismo de Weingarten del hiperboloide de una hoja
x2 +y2 �z2 = 1
Comprueba que todos su puntos son hipérbólicos.Solución
K =�1
(2x2 +2y2 �1)2
la curvatura media es
M =x2 +y2 �1
�2x2 +2y2 �1
� 32
y las curvaturas principales son
k1 =1p
2x2 +2y2 �1, k2 =
�1�2x2 +2y2 �1
� 32
EjercicioComprueba que todos los puntos de un plano son llanos.
ax +by +cz = d
EjercicioCalcula las curvaturas de Gauss y media del cilindroparametrizado
�(u,v) = (cosu,senu,v), u 2 (0,2p),v 2 R
Sol: K = 0 y H =�12
El cilindro es parabólico en todos sus puntos.
Resumen 1: Primera Forma Fundamental
1. Sea S ⇢ R3 una superficie parametrizada regularmentepor x(u,v) = (x1(u,v),x2(u,v),x3(u,v)), (u,v)⇢ D ⇢ R2
2. Calculamos xu = ∂x∂u ; xv = ∂x
∂v ;
8><
>:
E = xu ·xu
F = xu ·xv
G = xv ·xv
3. Matriz de la primera forma fundamental: I =✓
E FF G
◆
4. Ángulo respecto a las curvas coordenadas:(cosj = Fp
EGsenj =
pEG�F 2p
EG
Resumen 2: Aplicaciones sobre curvas
1. Sea una curva regular a sobre S parametrizada de lasiguiente forma:
a(t)= x(u(t),v(t))=⇣
x1(u(t),v(t)),x2(u(t),v(t)),x3(u(t),v(t))⌘
2. Calculamos du = u0(t); dv = v 0(t)3. Longitud de curva: s(t) =
R tt0
pE du2 +2F dudv +Gdv2 dx
4. Ángulo entre curvas: sean
(a(t) =~x(u1(t),v1(t))b (t) =~x(u2(t),v2(t))
cosj = a 0(t0)·b
0(t0)
||a 0 (t0)||·||b0 (t0)||
=
=E u
01(t0)u
02(t0)+F
⇣u01(t0)v
02(t0)+u
02(t0)v
01(t0)
⌘+Gv
01(t0)v
02(t0)q
E u01(t0)
2+2F u01(t0)v
01(t0)+Gv 0
1(t0)2·q
E u02(t0)
2+2F u02(t0)v
02(t0)+Gv 0
2(t0)2
Resumen 3: Segunda Forma Fundamental
1. Sea S ⇢ R3 una superficie parametrizada regularmentepor x(u,v) = (x1(u,v),x2(u,v),x3(u,v)), (u,v)⇢ D ⇢ R2
2. Calculamos~n =~xu ⇥~xv
||~xu ⇥~xv ||;
8><
>:
e =~xuu ·~nf =~xuv ·~ng =~xvv ·~n
3. Matriz de la segunda forma fundamental: I =✓
e ff g
◆
4. Curvatura Normal: kn =edu2 +2f dudv +g dv2
E du2 +2F dudv +Gdv2
Resumen 4: Direcciones, Curvaturas y Clasificación
1. Calculamos A =
✓E FF G
◆�1✓ e ff g
◆
2. Direcciones principales: Autovectores de A3. Curvaturas principales: Autovalores de A (las notamos k1 y
k2)
3.1 Curvatura Media: M =12(k1 +k2) =
E g�2f F +eG2(E G�F 2)
3.2 Curvatura de Gauss: K = k1 ·k2 =eg� f 2
E G�F 2
4. Para clasificar un punto p le calculamos K = Kp,~n(p) = Npy dNp:4.1 Punto elíptico: Si Kp > 04.2 Punto parabólico: Si Kp = 0 con dNp 6= 04.3 Punto hiperbólico: Si Kp < 04.4 Punto llano: Si dNp = 0
























![Diagnóstico diferencial clínico en pequeños animales 2641... · Diagnostico diferencial . Indic onten1d0 ABORDAJE CLíNICO DEL DIAGNÓSTICC DIFERENCIAL . liagnosti( diferen 'la]](https://static.documents.pub/doc/80x56/5ac5c0137f8b9ae06c8df278/diagnstico-diferencial-clnico-en-pequeos-2641diagnostico-diferencial-indic.jpg)


