!Err TRANSACTIONS ON SYSTEMS, MAN. ANI) C’YHT.RNT.TI(‘S, VOI.. 20, NO. 2. MAR(.II/APRII. 1000 419 Fuzzy Logic in Control Systems: Fuzzy Logic Controller, Part I1 Abstract -During the past sever al years, fuzzy control has emerged as one of the most active and fruitful areas for research in the applications of fuzzy set theory, especially in the realm of industrial processes, which do not lend themselves to control by conventional methods because of a lack of quantitative data regarding the input-output relations. Fuzzy control is based on fuzzy logic-a logical system that is much closer i n spirit to human thinking and natural language than traditional logical systems. The fuzzy logic controller (FLC) based on fuzzy logic provides a means of converting a linguistic control strat egy based on expert knowl - edge into an automatic control strategy. A survey of the FLC is pre- sented; a general methodology for constructing an FLC and assessing its performance is describ ed; and problems that need further research are pointed out. In particular, the exposition includes a discussion of fuzzification and defuzzification strategies, the derivation of the da tabase and fuzzy control rules, the definition of fuzzy implication, and an analysis of fuzzy reasoning mechanisms. I. DECISIONMAKING OGIC S WAS noted in Pa rt I of t his paper [150], an FL C A ay be regarded as a means of emulating a skilled human operator. More generally, the use of an FLC may be viewed as still another step in the direction o f model- ing human decisionmaking within the conceptual frame- work of fuzzy logic and approximate reasoning. In this context, the forward data-driven inference (generalized modus ponens) plays an especially important role. In what follows, we shall investigate fuzzy implication functions, the sentence connectives an d a n d also, compositional operators, inference mechanisms, and other concepts that are closely related to the decisionmaking logic of an FLC. A . Fuzzy Implication Functions In general, a fuzzy control rule is a fuzzy relation which is expressed as a fuzzy implication. In fuzzy logic, there are many ways in which a fuzzy implication may be defined. The definition of a fuzzy implication may be expressed as a fuzzy implication function. The choice of a fuzzy implication function reflects not only the intuitive criteria for implication but also the effect of connective also. Manuscript received May 27, 198X; revised July 1, 19x9. This work wpported in part by NASA under grant NCC-2-275 and in part by AFOSR under grant 89-0084. The aut hor is w ith the Electronics Research Laboratory, Department of Electrical Engineering and Computer Sciences, University of Califor- nia, Berkeley, CA 94720. IEEE Log Number X032014. I ) Basic Properties o f a Fuuy Implication Function: The choice of a fuzzy implication function involves a number of criteria, which are discussed in [31, [241, [2l, [711, [181, [5 21, [191, [ 116], [ S I , [72], and [96]. In par ticu lar, Baldwin and Pilsworth [3] considered the following basic characteristics of a fuzzy implication function: fundamen- tal property, smoothness property, unrestricted inference, symmetry o f generalized modus ponens and generalized modus tollens, and a measure of propagation of fuzziness. All of these pro perties are justified on purely intuitive grounds. We prefer to say that the inference (conse- quence) should be as close as possible to the input truth function value, rather than be equal to it. This gives us a more flexible criterion for choosing a fuzzy implication function. Furthermore, in a chain o f implications, it is necessary to consider the “fuzzy syllogism” [ 1471 associ- ated with each fuzzy implication function .before we can talk about the propagation of fuzziness. Fukami, Mizumoto, and Tanaka [24] have proposed a set o f intuitive criteria for choosing a fuzzy implication function that constrains the relations between the an- tecedents and consequents of a conditional proposition, with the latter playing the role o f a premise in approxi- mate reasoning. As is well known, there are two impor- tant fuzzy implication inference rules in approximate rea- soning. They are the generalized modus ponens (GMP) and the generalized modus tollens (GMT). Specifically, premise 1: x is A’ Dremise 2: if x is A then y is B (GMP) consequence: y is B ’ premise 1: y is B’ oremise 2: if x is A then v is B (GMT) consequence: x is A ’ in which A , A ’ , B , a n d B’ are fuzzy predicates. The propositions above the line are the premises; and the proposition below the line is the consequence. The pro- posed criteria are summarized in Tables I and 11. We note that if a causal relation between “ x is A” a n d “y is B” is not strong in a fuzzy implication, the satisfaction of criterion 2-2 and criterion 3-2 is allowed. Criterion 4-2 is interpreted as: if x is A then y is B , else y is not B . 0018-9472/90/0300-0419$01.00 01990 IEEE
Abstract -During the past several years, fuzzy control has emerged as
one of the most active and fruitful areas for research in the applications
of fuzzy set theory, especially in the realm of industrial processes, which
do not lend themselves to control by conventional methods because of a
lack of quantitative data regarding the input-output relations. Fuzzy
control is based on fuzzy logic-a logical system that is much closer in
spirit to human thinking and natural language than traditional logical
systems. The fuzzy logic controller (FLC) based on fuzzy logic provides a
means of converting a linguistic control strategy based on expert knowl-
edge into an automatic control strategy. A survey of the FLC is pre-
sented; a general methodology for constructing an FLC and assessing its
performance is describ ed; and problems that need further research are
pointed out. In particular, the exposition includes a discussion of
fuzzification and defuzzification strategies, the derivation of the da tabase
and fuzzy control rules, the definition of fuzzy implication, and an
analysis of fuzzy reasoning mechanisms.
I. D E C I S I O N M A K I N GO G I C
S WA S noted in Pa rt I of this pape r [150], an FL CA ay be regarded as a means of emulating a skilledhuman operator. More generally, the use of an FLC maybe viewed as still another step in the direction of model-ing human decisionmaking within the conceptual frame-
work of fuzzy logic and approximate reasoning. In thiscontext, the forward data-driven inference (generalized
modus ponens) plays an especially important role. In whatfollows, we shall investigate fuzzy implication functions,the sentence connectives an d and also , compositionaloperators, inference mechanisms, and o the r concepts thatare closely related to the decisionmaking logic of an FLC.
A . Fuzzy Implication Functions
In general, a fuzzy control rule is a fuzzy relation whichis expressed as a fuzzy implication. In fuzzy logic, there
are many ways in which a fuzzy implication may bedefined. The definition of a fuzzy implication may be
expressed as a fuzzy implication function. The choice of a
fuzzy implication function reflects not only the intuitivecriteria for implication but also the effect of connective
also.
Manuscript received May 27, 198X; revised July 1, 19x9. This work
wpported in part by NASA under grant NCC-2-275 and in part byAFOSR under grant 89-0084.
The aut hor is with the Electronics Research Laboratory, Department
of Electrical Engineering and Computer Sciences, University of Califor-
nia, Berkeley, CA 94720.
IEEE Log Number X032014.
I ) Basic Properties of a Fu u y Implication Function:
The choice of a fuzzy implication function involves anumber of criteria, which are discussed in [31, [241, [2l,
[711, [181, [521, [191, [116], [ S I , [72], and [96]. In par ticu lar ,Baldwin and Pilsworth [3] considered the following basiccharacteristics of a fuzzy implication function: fundamen-
tal property, smoothness property, unrestricted inference,symmetry of generalized modus ponens and generalizedmodus tollens, and a measure of propagation of fuzziness.All of these pro pertie s ar e justified on purely intuitivegrounds. We prefer to say that the inference (conse-quence) should be as close as possible to the input truthfunction value, rather than be equal to it. This gives us amore flexible criterion for choosing a fuzzy implication
function. Furthermore, in a chain of implications, it isnecessary to consider the “fuzzy syllogism” [1471 associ-ated with each fuzzy implication function .before we cantalk about the propagation of fuzziness.
Fukami, Mizumoto, an d Tanak a [24] have proposed ase t of intuitive criteria for choosing a fuzzy implicationfunction that constrains the relations between the an-tecedents and consequents of a conditional proposition,
with the latter playing the role of a premise in approxi-mate reasoning. As is well known, there are two impor-tant fuzzy implication inference rules in ap proximate rea -soning. They are the generalized modus ponens (GMP)and the generalized modus tollens (GMT). Specifically,
premise 1: x is A’
Dremise 2: if x is A then y is B ( G M P )
consequence: y is B’
premise 1: y is B’
orem ise 2: if x is A then v is B ( G M T )
consequence: x is A ’
in which A , A’, B , and B’ are fuzzy predicates. The
propositions above the line are the premises; and theproposition below the line is the consequence. The pro-posed criteria are summarized in Tables I and 11. We
note that if a causal relation between “ x is A” and “ y is
B” is not strong in a fuzzy implication, the satisfaction ofcriterion 2-2 and criterion 3-2 is allowed. Criterion 4-2 is
interpreted as: if x is A then y is B , else y is not B .
42 0 IEEE T R A N S A C T IO N S O N SYSTTMS. MA N, ANI) ( ' YBERNETI( ' S . Vol . . 20. NO . 2, MAlZ('II/Al 'KII. 1990
TABLE II NTU IT IVEC R I T E K I ATLATINGRE IAND CONS
FOR GIVEN PRE2 IN GM P
x is A'(Pre1) y is BYCons)
Criterion 1 x is A y is B
Criterion 2-1 x i s very A y is very BCriterion 2-2 x is very A y is B
Criterion 3-1 x is more or less A y is more or less BCriterion 3-2 x is more or less A y is B
Criterion 4-1 x is not A y is unknownCriterion 4-2 x is not A y is not B
Although this relation is not valid in formal logic, weoften m ake such a n interpretation in everyday reasoning.The same appl ies to c r i te rion 8.
Families of Fuzzy Implication Functions: Following
Zadeh 's [146] introduction of the compositional rule of
inference in approximate reasoning, a number of re-searchers have p roposed various implication functions inwhich the antecedents and consequents contain fuzzyvariables. Indeed, nearly 40 distinct fuzzy implicationfunctions have been described in the literature. In gen-
eral, they can be classified into three main categories: the
fuzzy conjunction, th e fuzzy disjunction, a nd the fuzzyimplication. The former two bear a close relation to a
fuzzy Cartesian product. The latter is a generalization ofimplication in multiple-valued logic and relates to theextension of material implication, implication in proposi-
tional calculus, modus ponens, and modus tollens [18]. Inwhat follows, after a short review of triangular norms andtriangular co-norms, we shall give the definitions of fuzzy
conjunction, fuzzy disjunction, and fuzzy implication.Some fuzzy implication functions, which are often em-ployed in an FLC and are commonly found in the litera-ture, will be derived.
Definition 1: Triangular Noms: The triangular norm *is a two-place function from [O, 11 x [O, 11 to [O, 11, i.e., * :
[O, 11X [0 ,13+ O, 11, which includes intersection, algebraic
product , bounded product , and dras t ic product . Thegreatest triangular norm is the intersection and the least
one is the drastic product. Th e operations associated w ithtriangular norms are defined for all x, y E [0,1]:
2)
intersection x A y = min ( x ,y )
algebraic product x . y = xy
bounded product x O y = ma x(0 ,x + y - )
x y = l
x n y = y x = li x , y < l .
drastic product
Definition 2: Triangular CO-Noms: The triangular co-norms + is a two-place function from [O, l ] x [O, l ] t o [O, l] ,
i.e. + : [O, 11 X [O, 11 t o [O, 11, which includes union, alge-braic sum, bounded sum, drastic sum, and disjoint sum.The operations associated with triangular co-norms are
TABLE 11
FOR G I V E N R E ~N GM TI N T U I T I V E CRITERIA R EI A TI N GRF.1 A N I ) CONS
v is B'(Pre1) x is AYCons)
x is not A
x is not very Ax is not more or less A
Criterion 5 y i s not B
Criterion 6 y i s not very BCriterion 7 y is not more or less B
Criterion 8-1 y i s B x is unknownCriterion 8-2 y is B x is A
defined for all x , y E O, 11:
union x v y = max{x, y )
algebraic sum x * y = x + y - x y
bounded sum x e y = m i n { l , x + y )
drastic sum
disjoint sum
x y = o
x u y = y x = oi x , y > o
xA y = max(min(x, 1 - y ) ,
min(1- x , y ) } .
The triangular norms are employed for defining conjunc-
tions in approximate reasoning, while the triangular co-norms serve the same role for disjunctions. A fuzzy con-trol rule, "if x is A then y is B," is represented by afuzzy implication function and is denoted by A + B,
where A and B are fuzzy sets in universes U and V with
membership funct ions p A an d p B , espectively.Definition 3: Fuuy Conjunction: Th e fuzzy conjunction
is defined for all U E U an d v E V by
A + B = A X B
= / I , x ~ p a ( u ) * p B ( v ) / ( u , v )
where * is an operator representing a triangular norm.
defined Cor all U E U an d v E V byDefinition 4: Fuuy Disjunction: The fuzzy disjunction is
A + B = A X B
where + is an ope rator representing a triangular co-norm.Definition 5: Fuzzy Implication: The fuzzy implication is
associated with five families of fuzzy implication fun ctionsin use. As before, * denotes a triangular norm and + is a
L E E : FUZZY LOGIC' IN ( ' O NTRO I. SYSTEMS: F U Z Z Y I . O C i l ( ' ( ' 0 NTK O I. I . TK - I ' ART I I 421
4.5) Generalization of modus tollens:
A + B = i n f { t ~ [ O , l ] , B + t < A }
Based on these definitions, many fuzzy implication func-tions may be generated by employing th e triangular norm sand co-norms. For example, by using the definition of th efuzzy conjunction, Mamdani's mini-fuzzy implication, R c ,is obtained if the intersection operator is used. Larsen's
product fuzzy implication, R ,, is obtained if the algebraicproduct is used. Furthermore, R ,, an d R,, are obta inedif the bounded product and th e dras t ic product a re used,
respectively. The following fuzzy implications, which areoften ado pted in an FLC , will be discussed in more detailat a late r point.
Mini-operation rule of fuzzy implication [Mamdani]:R , = A X B
Product operation rule of fuzzy implication [Larsen]:
R , = A x B
= P A ( U ) P . B ( V ) / ( U , v)./ " x v
Arithmetic rule of fuzzy implication [Zadeh]:R , = ( n o t A x V ) @ ( U B )
Maxmin rule of fuzzy implication [Zadeh]:R , = ( A x B ) u ( n o t A x V )
p J v ) ) ' J ( 1 - ~ A ( u ) ) / ( u , v ) .
Stand ard sequen ce fuzzy implication:R , = A x V + U X B
> p J v ) ) / ( u , v )
where
Boolean fuzzy implication:R , = ( n o t A x V ) U ( U x B )
p.A(u))v(pU,(v)) / (u,v) .
Goguen's fuzzy implication:
R A = A x V + U X B
>> p.B(v>)/(u,)
whereC L A ( U ) < r U B ( V )
PA(U)>> p J v ) = C L B ( U ) P A U ) > P B ( 4 .i'A ( V )
We note that Zadeh's arithmetic rule follows from
Definition 5.1 by using the bounded sum operator;Zadeh's maxmin rule follows from Definition 5.2 by usingthe intersection and union operators; the standard se-
quence implication follows from Definition 5.4 by using
from Definition 5.1 by using the union; and Goguen'sfuzzy implication follows from Definition 5.4 by using thealgebraic product.
Choice of a Fuzzy Implication Function: First, we
investigate th e consequ ences resulting from applying thepreceding forms of fuzzy implication in fuzzy inference
and, in part icular , the GMP and GMT. The inference isbased on the sup-min compositional rule of inference. In
the GMP, we examine the consequence of the followingcompositional equation:
where
3)
B ' = A ' o R
R fuzzy implication (relation),0 sup-min compositional operato r,A' a fuzzy set which has the form:
A = / u pA ( u ) / u
very A = A 2 = j U p ; ( u ) / u
more or less A = A".' = /up'j45(u)/u
no t A = jU1 p A ( u ) / u .
Similarly, in the GMT, we examine the consequence of
the fcllowing equation:
whereA ' = R o B '
R fuzzy implication (relation)
B' a fuzzy set that has th e form:not B = , ,1 - p B ( u ) / unot very B = jv l- p i ( v ) / vnot more or less B = /,,1- p 3 v ) / v
B = j v pB ( v ) / v.
The Case of R,: Larsen's Product Rule: A method forcomputing the generalized modus ponens and the gener-
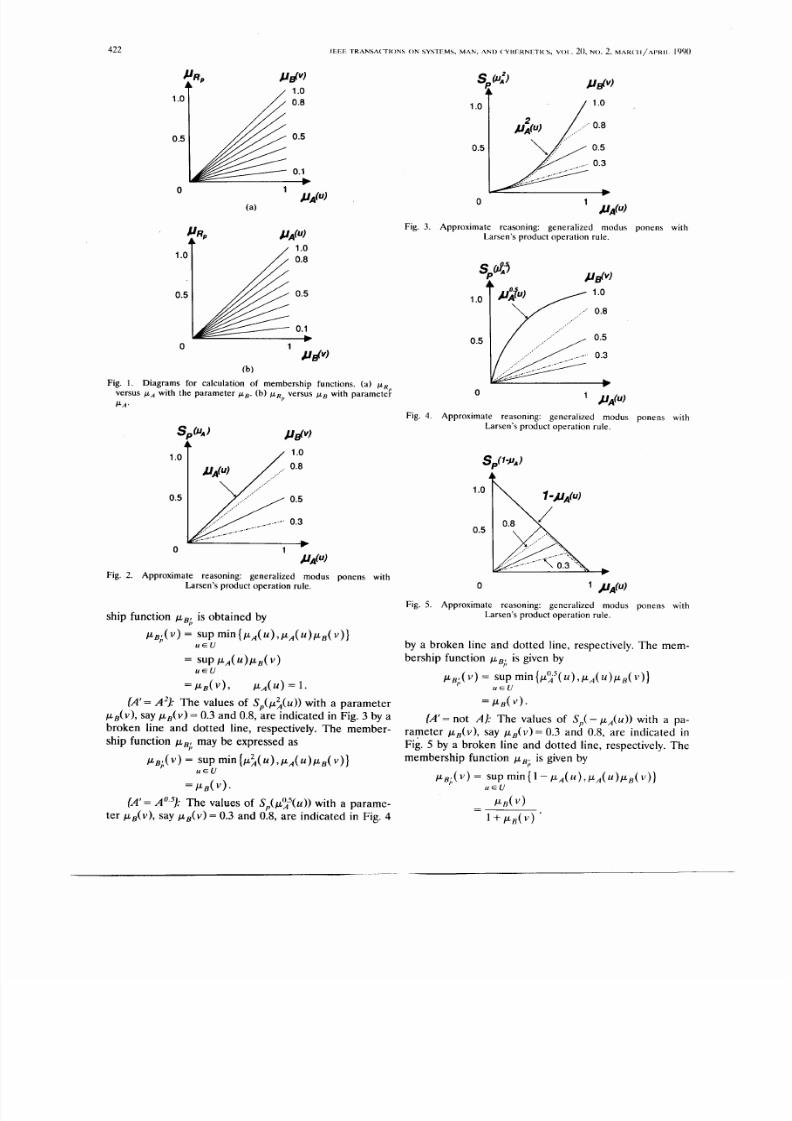
alized modus tollens laws of inference is described in [3].The graphs corresponding to Larsen's fuzzy implicationR , are given in Fig. 1. The graph with parameter pA isused for the GMP, and the graph with p B s used for the
G M T .Larsen's Product Rule in GMP: Suppose tha t A' = A*
(a 0); then the consequence B; is inferred as follows:
B; = A" 0 R, ,
The membership funct ion pBL of the fuzzy set B; ispointwise defined for all v E V by
p B; ( ) = su p m in ( l" A ( ) PA( )pf3( 111 E U
= SUP q 1 - P > < 4 >I1 E U
where
q I L % ) ) A min I P X 4 P A ( 4 I L B ( 4 ) .
{A' = A): The values of Sp(pA(u) )with a parameterpB(v ) , ay pB ( v )=0.3 an d 0.8, are indicated in Fig. 2 by a
the bounded product; Boolean fuzzy implication follows broken line and dotted line, respectively. The member-
versus pAwith the parameter j ~ ~ .b) pR,, versus pBwith parametef
PA.
Diagrams for calculation of membership functions. ( a ) flR
Fig. 2. Approximate reasoning: generalized modus ponens with
Larsen's product operation rule.
ship function pBL s obtained by
CLB$V) = SUP min (PA(U ) PA ( U) B ( V) IU € U
= SUP PA(U)CLB(V)
= p n ( V ) , C L A ( U ) = I -
{AA'= 2): Th e values of S, , (p : (u)) with a parameterpB( v) , say pB ( v)= 0.3 and 0.8, are indicated in Fig. 3 by abroken line and dotted line, respectively. The member-
ship function ps i may be expressed as
U € U
P B $ V ) = SUP min (Cl~ (u) ,CL A(u)p B(v)JU € U
= P B ( V ) .
{A' = The values of S,,(py(u)) with a parame-te r pB ( v) , s ay pJ v) = 0.3 and 0.8, are indicated in Fig. 4
S
1 o
0.5
0
Fig. 3. Approximate reasoning: generalized modus ponens with
Larsen's product operation rule.
0
Fig. 4. Approximate reasoning: generalized modus ponens with
Larsen's product operation rule.
s p ( l gA )
1 BA(()
0.5 ..?'.
-------.'\0.3''\.\.
0 A A ( ( )
Fig. 5. Approximate reasoning: generalized modus ponens with
Larsen's product operation rule.
by a broken line and d otted line, respectively. T he mem-
bership function pnL s given by
PB;,(V) = SUP min{l .~"( . ) ,pA(u) ,H(V~lU E ti
= p n ( v) .
{A' = no t A): The values of S,( - pA ( u ) )with a pa-ram ete r p s ( ~ ) , ay p s ( ~ ) = .3 and 0.8, are indicated inFig. 5 by a broken line and dotted line, respectively. The
memb ership function psh is given by
P , ( v ) = SUP m i n I l - p A ( U ) , p A ( U ) / * H ( v ) lU E ti
S U M M A R YF INFERENCERESULTSOR GENERALIZEDODUSPONENS
A Very A More orLess A No t A
PB 0.5 A
PBPB-
+ P B
4 s - 11
,lL
6-1
T V P B 1
1fi--2 V P B
G 1
Fig. 7 by a broken line and dotted line, respectively. Themembership function pA ; s given by
{B'= not The values of S,(1- &j5(v)) with aparameter pA(u) , ay pA (u )= 0.3 and 0.8, are indicated inFig. 8 by a broken line and dotted line, respectively. The
424 I E E E TRANSA(.TIONS ON SYSTEMS, MAN, ANI ) ( ‘ Y U E R N E T I C ‘ S . VOI.. 20 , NO. 2, M A R ( I I / A P R I L . 1990
TABLE IVS U M M A R YF INFERENCE RESULTSOR G E N E R A L I Z E Do o u s TOI.I .F.NS
No t B Not Very B Not More or Less B B
R , - . F A ) 1
I2
TABLE VSATISFACTIONF VARIOUSuzzy IMPLICATIONUNCTIONSNDERNTU IT IVEC R I T E R I A
R , R , R,, RP>? R , Rh R I ,
Criteria 1
Criteria 2- 1
Criteria 2- 2Criteria 3-1Criteria 3- 2
Criteria 4-1
Criteria 4- 2
Criteria 5
Criteria 6Criteria 7
Criteria 8-1
Criteria 8- 2
0
0
0
X
X
X
X
X
X
X
X
0
0
0
0
X
X
X
X
X
X
X
X
0
X
X
X
X
X
X
X
X
X
X
0
0
X
X
X
X
X
X
X
X
X
X
X
0
0
0
X
0
X
0
X
0
0
0
0
X
X
X
X
X
X
X
X
X
X
X
0
0
X
X
X
X
X
X
X
X
X
X
0
0
memb ership function pA ; , s given by
PLA;(U) = SUP m i n { P A ( U ) P B ( v ) , 1 - P ~ 5 ( V ) }
2 P A ( U )
V € V
- 2 P A U ) + 1-4-
{B’= B): The values of S , ( p B ( v ) )with a parameter
pA(u ) , ay pA (u )= 0.3 and 0.8, are indicated in Fig. 9 by abroken line and dotted line, respectively. The member-ship function pA ; s given by
P A ; W = SUP I P A ( U ) P B ( V ) ? P B ( V ) lV € V
= P A ( U ) .
The remaining consequences [24] inferred by R,, R,,
R,,R,,R,,R, can be obtained by the same method asjust described. The results are summarized in Tables I1 1
and IV.
By employing the intuitive criteria in Tables I and I 1 inTables 111 an d IV , we can determine how well a fuzzyimplication function satisfies them. This information is
summarized in Table V.In FLC applications, a control action is determined by
the observed inputs and the control rules, without the
consequent of one rule serving as the antecedent ofanother. In effect, the FLC functions as a one-level for-ward data-driven inference (GMP). Thus the backwardgoal-driven inference (GMT), chaining inference mecha-nisms (syllogisms), and contraposition do not play a rolein the F LC, since there is no need to infer a fuzzy controlaction through the use of these inference mechanisms.
Although R , and R, do not have a well-defined logicalstructure, the results tabulated in Table V indicate thatthey are well suited for approximate reasoning, especiallyfor the generalized modus ponens.
R, has a logical structure which is similar to R,. R, isbased on th e implication rule in Lukasiewicz’s logic LA leph .
However, R , and R, are not well suited for approximatereasoning since the inferred consequences do not alwaysfit our intuition. Furthermore, for multiple-valued logicalsystems, R , and R A have significant shortcomings. Over-all, R, yields reasonable results and thus constitutes an
appro priate choice for use in approxim ate reasoning.
B. Interpretationof Sentence Connectives “and, also’’
In most of the existing FLC’s, the sentence connective“an d” is usually imp lemented as a fuzzy conjunction in aCartesian product space in which the underlying variables
take values in different universes of discourse. As anillustration, in “i f ( A an d B ) hen C ,” the antecedent isinterpreted as a fuzzy set in the product space U X V ,
with the membership function given by
PA X B ( U ,.>min { P A ( U ) ? P A41
o r
PA x n ( U2
v )= PA (
U 1 . P A 1where U an d V are the universes of discourse associatedwith A an d B , respectively.
When a fuzzy system is characterized by a set of fuzzycontrol rules, the ordering of the rules is immaterial. Thisnecessitates that the sentence connective “also” shouldhave the properties of commutativity and associativity(see sections 111-A and 111-C in Part I and Par t D in thissection). In this connection, it should be noted that theoperators in triangular norms and co-norms possess theseproperties and thus qualify as the candidates for theinterpretation of the connective “also.” In general, we usethe triangular co-norms in association with fuzzy conjunc-tion and disjunction, and the triangular norms in associa-
tion with fuzzy implication. The experimental results[52]-[54], [96], [731 and the theoretical studies [181, [851,[116], [191 relate to this issue.
Kiszka et al. [52] described a p reliminary investigationof the fuzzy implication functions and the sentence con-nective “also” in the context of the fuzzy model of a dcseries motor. In later work, they presented additionalresults for fuzzy implication functions and the connective“also” in terms of the union and intersection o pera tors
[ S I , [ MI.Our investigation leads to some preliminary conclu-
sions. First, the connective “also” has a substantial influ-ence on the quality of a fuzzy model, as we might expect.Fuzzy implication functions such as R,, R A ,an d R, withthe connective “also” defined as the union operator, and
R c , R,, R , , , and R,,, defined as the intersection, yieldsatisfactory results. These fuzzy implication functions dif-fer in the number of mathematical operations which areneeded for computer implementat ion.
Recently, Stachowicz and Koch anska [96] studi ed thecharacteristics of 38 types of fuzzy implication along with
nine different interpretations (in terms of tr iangular normsand co-norms) of the connective “also,” based on variousforms of the operational curve of a series motor. Basedon their results, we tabulate in Table VI a summary of themost appropriate pairs for the FLC of the fuzzy implica-tion function and the connective “also.”
Additional results relating to the interpretation of theconnective “also” as the union and the intersection are
repo rted in [73]. Th e investigation in question is based ona plant model with first-order delay. It is established thatthe fuzzy implication functions R c ,R , , R h p ,R,, with the
connective “also” as the union operator yield the bestcontrol results. Furthermore, the fuzzy implications R,an d R, are not well suited for control applications even
TABLE VISLJlTAH1.F PAIRS OF A F(JZZYMP 1 I(ATI0N FUNCTION
AND CONNECTIVE “L l l S O”
Implication Rule Connective Also
“ I tdepends on the shape of reproduced curve which forms the set offuzzy control rules.
though they yield reasonably good results in approximatereasoning.
From a practical point of view, the computational as-pects of an FLC require a simplification of the fuzzycontrol algorithm. In this perspective, Mamdani’s R, an dLarsen’s R, with the connective “also” as the unionoperato r app ear to be b etter suited for constructing fuzzymodels than the other methods in FLC applications. Wewill have more to say about these methods at a laterpoint.
C. Compositional Operators
In a general form, a compositional operator may beexpressed as the sup-star composition, where “star” de-note s an operator-e.g., min, prod uct, etc.-which ischosen to fit a specific application. In the literature, fourkinds of compositional operators can be used in the
compositional operators are the most frequently used.Th e reason is obvious, when th e computation al aspects of
an FLC are considered. However, interesting results canbe obtained if we apply the sup-product, sup-bounded-prod uct, and sup-drastic-product ope ration s with differ-ent fuzzy implication functions in approximate reasoning
[70], [72]. The inferred results employing these composi-tional operators are better than those employing thesup-min opera tor. Fu rthe r investigation of these issues inthe context of the accuracy of fuzzy models may provideinteresting results.
D. Inference Mechanisms
The inference mechanisms employed in an FLC aregenerally much simpler than those used in a typical expertsystem, since in an FLC the consequent of a rule is not
applied to the antecedent of another. In other words, inFLC we do not employ the chaining inference mecha-nism, since the control actions are based on one-levelforward data-driven infere nce (GMP).
The rule base of an FLC is usually derived from expertknowledge. Typically, the rule base has the form of a
426 IEEE TKANSAC‘TIONS ON SYSTEMS, MAN, AND (‘YBEKNETIC‘S, VOL.. 20, NO. 2, MAK(.H/APKIL 1990
MIM O system
R = { R L I M O , R h I M O , ’ ‘ - 9 R“,MO}
where R‘,,,, represents the rule: if ( x is A ; a n d . . . ,and y is B ; ) hen (z , is C;; . ., zq is 0;).he antecedentof R,,,, forms a fuzzy set A ; x - x E; in the productspace U X . . . X V. The consequent is the union of q
independent control actions. Thus the ith rule R‘,,,,
may be re presen ted as a fuzzy implication
R‘,,,,: ( A i . . . X B ; ) -+ (Z,+ . . . + z q )
from which it follows that t he rule base R may be repre-sented as th e union
= { i j [ ( A ; x . . X B ; ) - + ( z , + * * * + z q , ] }
= { i j [ ( A ; x . . X B ; ) - + z , ) ] ,
i j [ ( A ; x . . x B ; ) - + z q ) ] }
i = 1
i = l
n
. U [ ( A ; x . . XB ; ) + z 2 ) ] ; - ,i = I
i = l
= { U U [ ( A ;X * * * x B ; ) + z x ) ] )k = l i = l
= { ~ L I I S OR G4 1 S O ,. .,RB&ISOJ.In effect, the rule base R of an FL C is composed of a setof sub-rule-bases RBL,,,, with each sub-rule-base
RBL,,, consisting of n fuzzy control rules with multipleprocess state variables and a single control variable. Thegeneral rule structu re of a MIMO fuzzy system can there-
fore be represented as a collection of MISO fuzzy sys-tems:
R = ~ ~ I , , ~41so * * ,Wl1so)
where RB;,,, represents the rule: if ( x is A; a n d . . . ,and y is B i ) hen ( 2 , is D;),= 1,2; . , n.
Let us consider the following general form of MISOfuzzy control rules in the case of two-input/single-ou tputfuzzy systems:
input:
R I :also R,:
x is A’ an d y is B’if x is A , and y is B , then z is C,
if x is A , and y is B, then z is C,
. . .
. . .also R,: if x is A, and y is B, then z is C,
z is C’
where x , y, and z are linguistic variables representing the
process state variables and the control variable, respec-
tively; A , , B,, an d C, are linguistic values of th e linguisticvariables x , y, and z in the universes of discourse U, V ,
and W, respectively, with i = 1,2; a , n.
Th e fuzzy control rule “i f ( x is A , and y is B , ) then ( z
is C, ) ) ’ s implem ented as a fuzzy implication (relation) R ,
and is defined as
P R , ~ P - ( A , d n d B , ~ C , ) ( U , V , W )
= [ P A , ( U ) and PB,(V)] + P C , ( W )
where “ A , an d B,” is a fuzzy set A , X B, in U X KR , ( A , an d B , ) + C, is a fuzzy implication (relation) inU x V x W7 nd -+ deno tes a fuzzy implication function.
The consequence C’ is deduced from the sup-starcompositional rule of inference employing the definitionsof a fuzzy implication function and the connectives “and”and “also.”
In what follows, we shall consider some useful proper-ties of the FLC inference mechanism. First, we would liketo show that the sup-min operato r denoted by 0 and theconnective “also” as th e union ope rator a re commutative.Thu s the fuzzy control action inferred from the com plete
se t of fuzzy control rules is equivalent to the aggregatedresult derived from individual control rules. Furthermore,as will be shown later, th e sam e properties are possessedby th e sup-product ope rato r. However, the conclusion inquestion does not apply when the fuzzy implication isused in its traditional logical sense [lS], [19]. More specifi-cally, we have
Lemma I: (A ‘ ,B ’ ) U= ,R I= U= , (A ‘ ,B ’ ) R I .
Proofi
n
C ’ = ( A ’ , B ’ ) oUR,r = l
n
= ( A ‘ , ’ ) U ( A , and B, -+ C,).
The membership function pc . of the fuzzy set C’ is
r = l
pointwise defined for all w E W by
Pc,( W )= ( P A ’ W P B 4 V I ) ma x ( P R f 4 ,w )u , v , w
.PRJU,v,w), . . ,PR,,(U,V,W))
= SUP min ( (PA4 U ) Pus-(v ) 7 max ( P R f U , ,w )
= SUP max (min [(PA~(”),PB~(v)),c~~U,v,w)]
. . , m i n [ ( P A , < ) P B ’ ( v)), PR,{ U ? , I ]
= max { [ P A ’ ( 4 P B ’(4 ) ” R f U 9 V d ]
. . . [ P A ’ ( 4 P B ’ ( V ) ) O PR, , (U,v ,w)]} .
LEE: FUZZY L . O G l ( ~ IN C'ONTROI. SYSTEMS: FUZ7.Y IO(il( ' C'ONTK0I. I ER-PART II 427
Therefore
C'= [ ( A ' , ' ) . RI ] U [ ( A ' , B ' ) oR,]
U ( A ' , B ' ) 0 R,,]U . . .
n
= U ( A ' ,B' ) R,, = I
n
= U A ' , B ' ) o ( A , nd B , - +C , )
/ = I
n
U c/f., = I
Lemma 2: For the fuzzy conjunctions R,, R,, R,,, and
R,,, we have
( A ' ,B ' ) 0 ( A , and B, -+ C,)
= [ A ' ~ ( A , - + C , ) ] ~ [ B ' O ( ~ , - + C , ) ]
if P A , X B , = PA , A P B ,
( A ' ,B ' ) 0 ( A , nd B , -+ C , )
= [ A ' . ( A , -+C, )] B ' . ( B , -+C,)]
ifP A , X B ,
P A , ' P B , .
Proofi
C ; = ( A ' , B ' ) o ( A , nd B,-+C,)
c ~ c ; = ( l ~ A , , ~ B , ) o ( l l A , x B ,+ P c , )
= (PA ' ,P B ' ) (min ( P A , P B , ) -+ P C , )
= (PA ' ,P B ' ) min [(PA, PC,) (P B , -+ PC, ]
= sup min { [ ( P A , , PB . )
u , v
' m i n [ ( PA , - + PC , ) ~ ( P B , - + ) l C , ) ] }
= supmin {min [P ~ , ~P A , -+c l C , > ] ,u , v
.min [ P B , ? PB, -+Pc, ] 1
= m i n { [ P A " ( P A , -+ P C , ) ] ? * B " ( P B , -3 P C , ) ] } .
Hence we obta in
C ; = [ A ' . A , + C , ) ] n B'o( , -+C, )] Q.E.D.
Let us consider two special cases that follow from thepreceding lemma and that play an important role in FLC
applications.
Lemma 3: If the inputs are fuzzy singletons, namely,A ' = U(),B ' = v o , then the results dervied by employing
Mamdani's minimum operation rule R , and Larsen's
product opera t ion rule R,, respectively, may be expressedsimply as
R , : %* A P C , ( W )
As will be seen in following section, the last lemma notonly simplifies the process of computation but also pro-vides a graphic interpretation of the fuzzy inference
mechanism in the FLC. Turning to the sup-product oper-ator, which is denoted as - ,we have the following.
n n
Lemma 2': ( A ' , B ' ) *UR j = U (A ' , B ' )* R j .
Lemma 2' : For the fuzzy conjunctions R , , R,, R,,,
i - 1 i = l
and R,,, we have
( A ' ,B ' ) - ( A , and B, -+C,)
= [ A ' . ( A , -+c,)] B' .( B, -+c,)]if ~ A , x e , PA ,A P B ,
( A ' , ' ) . ( A , and B, -+C ,)
= [ A ' * (A , + C,)] . B ' * (B , -+C , ) ]
if P A , ~ B , =PA, *PB;
Lemma 3: If the inputs are fuzzy singletons, namely,
A ' = U(),B ' = v O , then the results derived by employing
Mamdani's minimum operation rule R , and Larsen'sproduct operation rule R,, respectively, may b e expressed
simply as
R,: f f r / \ A P C , ( W ) R, : f f ;A Pc,(W)
R,: f f , " ~ P C L c , ( W ) R,: f f , . * P C , ( W )2))
where a," = p A , ( ~ ( ) ) AS,(vo) nd a; = EI.A,(U()).PB,(VO).
Therefore we can assert thatn
R,: Pes= U a, Pc,, = I
n
R,: Pea= U f f , . P C ,, = I
where the weighting factor (firing strength) a; is a mea-sure of the contribution of the i th rule to the fuzzycontrol action. The weighting factor in question may bedetermined by two methods. The first uses the minimumoperation in the Cartesian product, which is widely used
428 I E E C TRANSACTIONS ON SYSTTMS, MAN. A N D (‘YUERNFTIC‘S, V O L . 20, NO. 2, MAR( . H / AP RII 1990
hs. .................-----.--[;>, , ,p, , l l [~....,... ..... ... ................. ys
0 0 0,
! ,< ,
U V
I ,
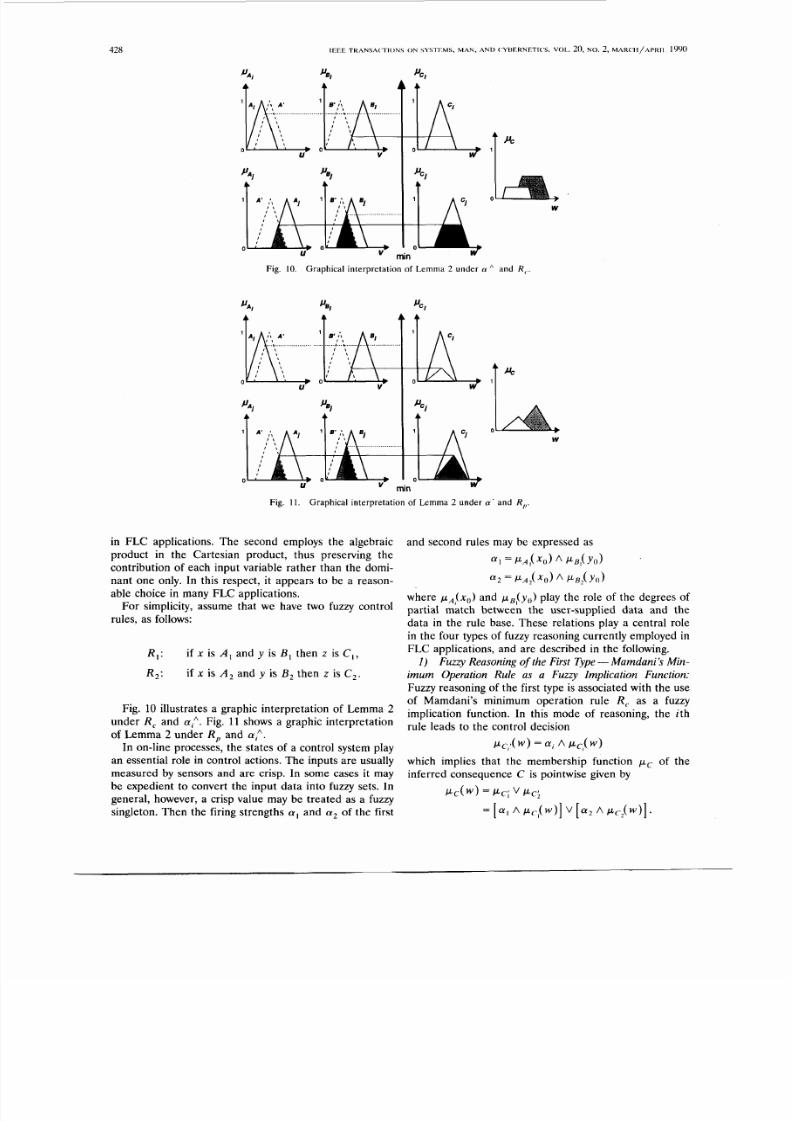
Fig. 10. Graphical interpretation of Lemma 2 under a A and R c .
Fig. 1 1 . Graphical interpretation of Lemma 2 under a’ nd R,,.
in FLC applications. The second employs the algebraicproduct in the Cartesian product, thus preserving the
contribution of each input variable rather than the domi-nant one only. In this respect, i t appears to be a reason-able choice in many FLC applications.
For simplicity, assume that we have two fuzzy controlrules, a s follows:
R I :
R,:
if x is A , an d y is B , then z is C , ,
if x is A , an d y is B , then z is C , .
Fig. 10 illustrates a graphic interpretation of Le mma 2under R, an d a:. Fig. 11 shows a graphic interpretationof Lemma 2 unde r R , an d a:.
In on-line processes, th e states of a control system play
an essential role in control actions. T he inp uts are usuallymeasured by sensors and are crisp. In some cases it may
be ex pedient to convert the in put d ata into fuzzy sets. Ingeneral, however, a crisp value may be treated as a fuzzysingleton. Th en th e firing strengths a, nd a, of the first
and second rules may be expressed as
= P A I ( X , ) ) A PB , ( YO )
a2 = P A 2 ( X O ) A PBZ ( Y 0 )
where k A , ( x O ) nd p B f y o ) lay the role of the degrees ofpartial match between the user-supplied data and the
data in the rule base. These relations play a central rolein the fo ur types of fuzzy reasoning c urren tly employed in
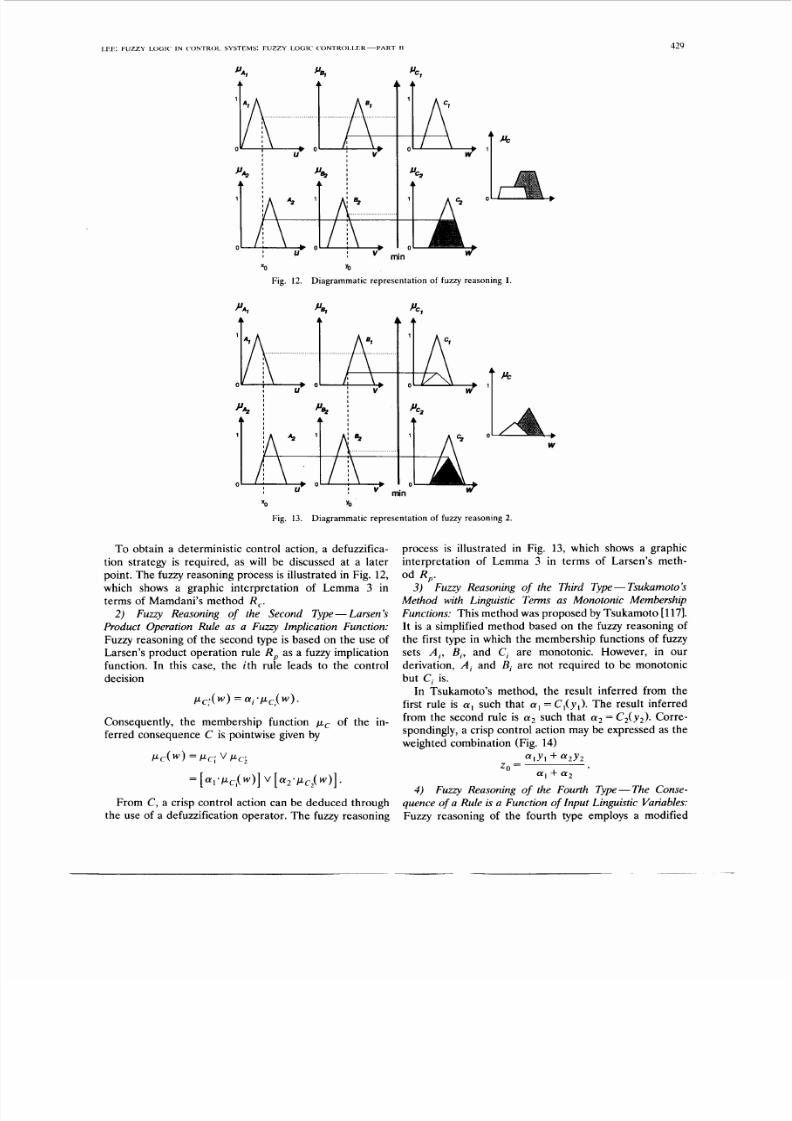
FLC applications, and are described in the following.Fuzzy Reasoning of the First Type- amdani’s Min-
imum Operation Rule as a Fuzzy Implication Function:
Fuzzy reasoning of the first type is associated with the useof Mamdani’s minimum operation rule R, as a fuzzyimplication function. In this mode of reasoning, the ith
rule leads to the control decision
I )
P C , W = r A Pc,(W)
which implies that the membership function (U of theinferred consequence C is pointwise given by
Fig. 12. Diagrammatic representation of fuzzy reasoning 1
W
XO YO
Fig. 13. Diagrammatic representation of fuzzy reasoning 2.
T o obtain a deterministic cont rol action, a defuzzifica-
tion strategy is required, as will be discussed at a laterpoint. T he fuzzy reasoning process is illustrated in Fig. 12, which shows a graphic interpretation of Lemma 3 interms of Mamdani's method R , .
2) Fuzzy Reasoning of the Second Type- Larsen'sProduct Operation Rule as a Fuzzy Implication Function:
Fuzzy reasoning of the second type is based on the use ofLarsen's product operation rule R , as a fuzzy implicationfunction. In this case, the ith rule leads to the control
decision
P ~ : ( w ) a i * P c , ( w ) -
Consequently, the membership function p c of the in-ferred consequence C is pointwise given by
P C ( W ) =Pc ; v Pc ;
= [ a , * P c , ( W ) ] v [% . P C , ( W ) ] .
From C , a crisp control action can be d educed throughthe use of a defuzzification operator. The fuzzy reasoning
process is illustrated in Fig. 13, which shows a graphic
interpretation of Lemma 3 in terms of Larsen's meth-od R ,.
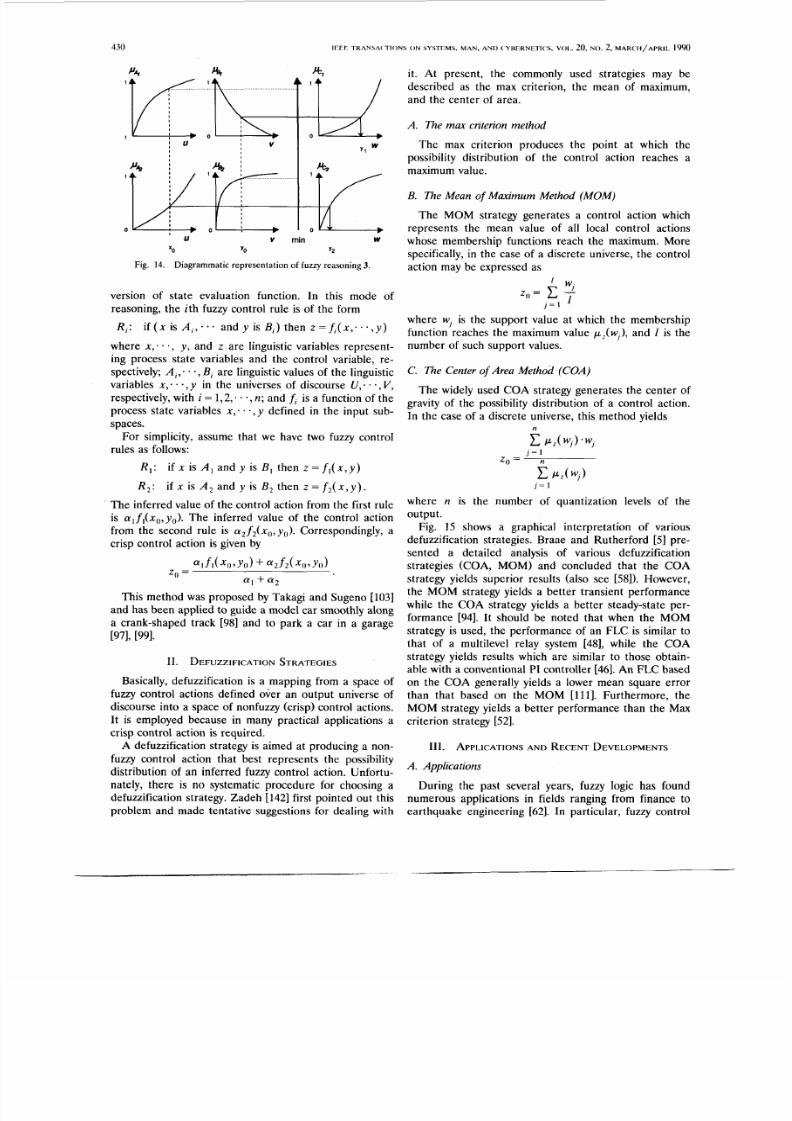
3) Fuzzy Reasoning of the Third Type- sukamoto'sMethod with Linguistic Terms as Monotonic Membership
Functions: This method was proposed by Tsukam oto [1171.It is a simplified method based on the fuzzy reasoning of
the first type in which the memb ership functions of fuzzysets A , , B,, and C , are monotonic. However, in our
derivation, A , and B, are not required to be m onotonicbut C , is.
In Tsukamoto's method, the result inferred from thefirst rule is a , such that a I= C , ( y , ) .The result inferredfrom the second rule is a 2 such that a2= C , ( y 2 ) .Corre-spondingly, a crisp control action may be expressed as the
weighted combination (Fig. 14)
aIYl+ % Y 2
20 =+ a2
Fuzzy Reasoning of the Fourth Type-The Conse-
quence of a Rule is a Function of Input Linguistic Variables:
Fuzzy reasoning of the fourth type employs a modified
version of state evaluation function. In this mode of
reasoning, the ith fuzzy control rule is of the form
R I : i f ( x i s A , ; . . a n d y i s B , ) t h e n z = f , ( x ; . . , y )
where x , . . . y, and z are linguistic variables represent-ing process state variables and the control variable, re-spectively; A , , . B, a re linguistic values of t he linguisticvariables x , * e , y in the universes of discourse U , . . V ,
respectively, with i = 1 , 2 , . . - , ; an d f, is a function of th e
process state variables x , . . . defined in the input sub-
spaces.For simplicity, assume that we have two fuzzy control
rules as follows:
R I : i f x is A , and y is B, then z = f l ( x , y )
R , : if x is A , and y is B, th en z = f2 ( x , y ) .
Th e inferred value of the control action from th e first ruleis a l l (xo ,yo ) . The inferred va lue of th e control ac t ion
from the second rule is a2 ,<x,,, yo). Correspondingly, acrisp control action is given by
f ( xo , o1+ u * f 2 (xo Yo)+ f f 2
Z" =
This method was proposed by Takagi and Sugeno [lo31
and has be en app lied to guide a model car smoothly alonga crank-shaped track [98] and to park a car in a garage
[971, P91.
11. DEFUZZIFIC ATIONTR ATEGIES
Basically, defuzzification is a mapping from a space offuzzy control actions defined over an output universe of
discourse into a space of nonfuzzy (crisp) control actions.
It is employed because in many practical applications acrisp control action is required.
A defuzzification strategy is aimed at producing a non-
fuzzy control action that best represents the possibilitydistribution of an inferred fuzzy control action. Unfortu-nately, there is no systematic procedure for choosing adefuzzification strategy. Zadeh 11421 first pointed ou t this
problem and made tentative suggestions for dealing with
it . At presen t, the commonly used strategies may be
described as the max criterion, the mean of maximum,and the center of area .
A. The mar criterion method
The max criterion produces the point at which the
possibility distribution of the control action reaches amaximum value.
B. The Mean of Maximum Method (MO M)
The MOM strategy generates a control action which
represents the mean value of all local control actionswhose membership functions reach the maximum. Morespecifically, in the case of a discrete universe, the controlaction may be expressed as
I w
Z() = c 2] = I 1
where wI is the support value at which the membershipfunction reaches the maximum value pz(wl ) ,an d 1 is thenumber of such support values.
C. The Center of Area Method (COA)
The widely used COA strategy generates the center of
gravity of the possibility distribution of a control action.In the case of a discrete universe, this method yields
n
c LZ (WI ) *W l
c A W ] )
/ = I
20 = n
] = I
where n is the number of quantization levels of th eoutput .
Fig. 15 shows a graphical interpretation of variousdefuzzification strategies. Braae and Rutherford [5] pre-sented a detailed analysis of various defuzzification
s tra tegies (COA, MOM) and concluded tha t the COAstrategy yields superior results (also see [58]). However,the MOM strategy yields a better transient performancewhile the COA strategy yields a better steady-state per-formance [94]. I t should be noted tha t when the MOMstrategy is used, the performance of an FLC is similar to
that of a multilevel relay system [48], while the COA
strategy yields results which are similar to those obtain-able with a conventional PI controller [46]. An F LC ba s edon the COA generally yields a lower mean square error
than tha t based on the MOM [ l l l ] . Furthermore , theMOM strategy yields a better performance than the Maxcriterion strategy [521.
111. APPLIC ATIONSND R EC ENT EVELOPM ENTS
A . Applications
During the past several years, fuzzy logic has foundnumerous applications in fields ranging from finance toearthquake engineering [62]. In particular, fuzzy control
LEE: FlJZZY LLOCIC IN CONTROL. S YS TEMS : F1JZZY I.OGI(’ (‘ONTKOI.I.TH-I’AKT II 43 1
0
/ 1 \”MA X COA MOM
Fig. 15 . Diagrammatic representation of various defuzzification strate -gies.
has emerged as one of the most active and fruitful areasfor research in the application of fuzzy set theory. Inmany applications, the FLC-based systems have proved tobe superior in perform ance to conventional systems.
Notable applications of FL C include the heat exchange[80], warm water process [47], activated sludge process[113], [35], traffic junction [82], cement kiln [59], [118],aircraft flight control [ S I , turning process [92], robotcontrol [1191, [941, [1061, [SI, [34], model-car parking andtur nin g [971-[991, aut om obi le spee d con trol [74], [751, wa-ter purification process [127], elevator control [23], auto-
mobile transmission control [40], power systems and nu-
clear reactor control [4], [511, fuzzy memory devices [107],[108], [120], [1281, [1291, [133], and the fuzzy computer[132]. In this connection, it should be noted that the firstsuccessful industrial application of th e FL C was th e ce-ment kiln control system developed by the Danish cementplant man ufacturer F . L. Smidth in 1979. An ingenious
application is Sugeno’s fuzzy car, which has t he capabilityof learnin g from exam ples. More recently, predictive fuzzy
control systems have been proposed and successfully ap-plied to automatic train operation systems and automaticconta iner cra ne operati on systems [135]-[139]. In parallelwith these developments, a great deal of progress has
been made in the design of fuzzy hardware and its use inso-called fuzzy computers [132].
B. Recent Developments
Sugeno’s Fuzzy Car: O n e of the most interestingapplications of the FLC is the fuzzy car designed bySugeno. Sugeno’s car has successfully followed a crank-shaped track and parked itself in a garage [98]-[991.
Th e control policy incorporated in Sugeno’s car is rep-resented by a set of fuzzy control rules which have theform:
R I :
1 )
if x is A , , . . . an d y is B, then
z = a;,+ a i x + . . . + a i y
where x ; . ., an d y are linguistic variables representing
the distances and orientation in relation to the bound-aries of th e track; A , ; . , and B, are linguistic values of
x ; . , an d y ; z is the value of the control variable of th eith control rule; and a;,; * , and a; are the parametersentering in the identification algorithm [1031, [99].
Th e inference m echanism of Sugeno’s fuzzy car is basedon fuzzy reasoning of the fourth type, with the parameters
AngleN L N M N S Z R PS PM PL
N LN M
Change NS NS Z Rof Z R N M Z R PM
Angle PS Z R PSP M
P L
a:,; . ., an d a:, identified by training. The training processinvolves a skilled ope rato r who guides th e fuzzy model carunder different conditions. In this way, Sugeno’s car hasthe capability of learning from examples.
FLC Hardware Systems: A higher-speed FLC hard-
ware system employing fuzzy reasoning of the first typehas been proposed by Yamakawa [130], 11311. It is com-posed of 15 control rule boards and an action interface(i.e., a defuzzifier based on the COA). It can handle fuzzylinguistic rules labeled as N L , N M , N S , Z R , P S , P M , P L .The operational speed is approximately 10 mega fuzzy
logical inferences per second (FLIPS).Th e FLC h ardware system has been tested by an appli-cation to th e stabilization of inverted pendulum s moun tedon a vehicle. Two pendulums with different parameterswere controlled by the same set of fuzzy control rules(Table VII). It is worthy of note that only seven fuzzycontrol rules achieve this result. Each control rule board
and action interface has been integrated to a 40-pin chip.
3) Fuzzy Automatic Train Operation (ATO) Systems:Hitachi Ltd. has developed a fuzzy automatic train opera-
tion system (ATO) which has been in use in the Sendai-City subway system in Japan since July 1987. In thissystem, an object evaluation fuzzy controller predicts theperformance of each candidate control command an dselects the most likely control com mand based o n a skilled
human operator’s experience.More specifically, fuzzy A T 0 comprises two rule bases
which evaluate two major functions of a skilled operator
based on the criteria of safety, riding comfort, stop-gapaccuracy, traceability of target velocity, energy consump-
tion, and running time. One is constant-speed control(CSC), which starts a train and maintains a prescribedspeed. The other is the train automatic stop control(TASC), which regulates a train speed in order to stop atthe target position at a station. Each rule base consists oftwelve object-evaluation fuzzy control rules. The an-
tecedent of every control rule performs the evaluation oftrain operation based on safety, riding comfort, stop-gapaccuracy, etc. The consequent determines the controlaction to be taken based on the degree of satisfaction of
each criterion. The control action is the value of the t ra incontrol n otch, which is evalu ated every 100 ms from themaximal evaluation of each candidate control action, andit takes as a value a discrete numb er; positive value m eans“power notch,” negative value means “break notch.”
43 2 IELE TRANSACTIONS O N SYSTIIMS, MAN, ANI) <‘YHF.KNF.TI(‘S. VO I . 20 . N O . 2, M A R < ~ l l / A P R I l 1990
Th e Sendai-City subway system ha s been demon strated
to be superior in performance to the conventional PIDA T 0 in riding comfort, stop gap accuracy, energy con-sum ption , runn ing time, and robu stness [1351, [1361, [1391.
Fuzzy Automatic Container Crane Operation (ACO)Systems: In the application of FLC to the au tomatic oper-ation of container-ship loading cranes, th e principal p er-formance criteria are safety, stop-gap accuracy, containersway, and carrying time.
Fuzzy ACO involves two major operations: the trolleyoperation and the wire rope operation. Each operationcomprises two function levels: a decision level and an
activation level. Field tests of fuzzy ACO systems withreal container cranes have been performed at the port ofKitakyusyu in Japan. The experimental results show that
cargo handling ability of Fuzzy ACO by an unskilledoperator is more than 30 containers per hour, which iscomparable to the performance of a veteran operator.
Th e tests have established th at th e fuzzy AC O controllerhas the capability of operating a crane as safely, accu-rately, and skillfully as a highly experienced hu man opera-to r [1371-[ 1391.
Fuzzy Logic Chips and Fuzzy Computers: The first
fuzzy logic chip was designed by Togai and Wata nabe atAT &T Bell Laboratories in 1985 [107]. Th e fuzzy infer-ence chip, which can process 16 rules in parallel, consistsof four major parts: a rule-set memory, an inference-processing unit, a controller , and an input-outpu t cir-cuitry. Recently, the rule-set memory has been imple-mented by a static random access memory (SRAM) to
realize a capability for dynamic changes in the rule set.The inference-processing unit is based on the sup-mincompositional rule of inference. Preliminary timing testsindicate that the chip can perform approximately 250000
FLIPS at 16-MHz clock. A fuzzy logic accelerator (FLA)based on this chip is currently under development [ l08],
[1201. Furthermore, in March 1989 the MicroelectronicsCente r of North Carolina successfully completed t he fab-
rication of th e world’s fastest fuzzy logic chip, designed byWatanabe. The full-custom chip comprises 688 000 t ran-sistors and is capable of making 580000 FLIPS.
In Japan, Yamakawa and Miki realized nine basic fuzzylogic functions by the standard CMOS process incurrent-mode circuit systems [1281. Later, a rudimentaryconcept of a fuzzy compu ter was propo sed by Yamakawaand built by OM RO N Tateishi Electric Co. Ltd [132]. Th e
Yamakawa-OMRON computer comprises a fuzzy mem-ory, a set of inference engines, a MAX block, a defuzzi-fier , and a control unit. The fuzzy memory stores lin-
guistic fuzzy information in the form of membershipfunctions. I t has a binary R AM , a register, and a memb er-ship function generator [128]. A membership function
generator (M FG ) consists of a P RO M , a pass transistorarray, and a decoder. Every term in a term set is repre-sented by a binary code and sto red in a binary RA M. T hecorresponding membership functions are generated bythe MFG via these binary codes. The inference engine
4)
5 )
employs M A X and MIN operations, which are imple-mented by the emitter coupled fuzzy logic gates (ECFLgates) in voltage-mode circuit systems. The linguistic in-puts, which are represented by analog voltages distributedon data buses, are fed into each inference engine inparallel. The results inferred from the rules are aggre-gated by a MAX block, which implements the function ofthe connective “also” as a union operation, yielding acon sequ ence which is a set of analog voltages distrib uted
on output lines. In the FLC applications, a crisp controlcommand necessitates an auxiliary defuzzifier. In thisimplemen tation, a fuzzy computer is capable of process-ing fuzzy information at the very high speed of approxi-mately 10 mega-FLIPS. I t is indeed an imp ortant step notonly in industrial applications but also in common-sense
knowledge processing.
IV . FUTURET U D I E SN D P R O B L E M S
In many of its applications, FLC is either designed bydomain experts or in close collaboration with domainexperts. Knowledge acquisition in FLC applications playsan im portant role in determining the level of performanc eof a fuzzy control system. However, domain experts and
skilled o perators do not structure their decisionmaking inany formal way. As a result, the process of transferring
expert knowledge into a usable knowledge base of anFLC is time-consuming and nontrivial. Although fuzzylogic provides an effective tool for linguistic knowledgerepresentation and Zadeh’s compositional rule of infer-ence serves as a useful guideline, we are still in need ofmore efficient and more systematic methods for knowl-edge acquisition.
An FLC based on the fuzzy model of a process isneeded when higher accuracy and reliability are required.However, the fuzzy modeling of a process is still not wellunderstood due to difficulties in modeling the linguisticstructure of a process and obtaining operating data inindustrial process control [131, [841, [ l l l l , [1251, 11041,
[ l o l l .Classical control theory has been well developed and
provides an effective tool for mathematical system analy-sis and design when a precise model of a system isavailable. In a complementary way, FLC has found many
practical applications as a means of replacing a skilledhuman operator. For further advances, what is needed atthis junctu re ar e well-founded procedures for system de-sign. In response to this need, many researchers areengaged in the development of a theory of fuzzy dynamicsystems which extends the fundamental notions of state
161, con trol lab ility [311, an d stabil ity [771, [441, 1891, [S I .Another direction of recent exploration is the concep-
tion and design of fuzzy systems that have the capabilityto learn from experience. In this area, a combination oftechniques drawn from both fuzzy logic and neural net-work theory may provide a powerful tool for the design ofsystems which can emulate the remarkable human abilityto learn and adapt to changes in environment.
1 am great ly indeb ted to Professor b t f i A . &de-, of
the University of California-Berkeley for his enco urag e-
is gratefully acknowledged. The author would like tothank Professor M. Tomizuka of the University of Califor-
nia-Berkeley and the reviewers for their helpfu l corn-
ments and suggestions.
[25] B. R. Gaines and L. J. Kohout, “The fuzzy decade: A bibliogra-
phy of fuzzy systems and closely related topics,” Int . J. Man.Mach. Studies, vol. 9, pp. 1-68, 1977.
[26] s. Gottwald and W. Pedrycz, “Problems of the design of fuzzycontrollers,” in Approximate Reasoning in Expert Systems, M. M.
Gupta , A. Kandel, W. Bandler, and J. B. Kiszka, Ed. Amster-
dam: North-Holland, 1985, pp. 393-405.
[27] B. P. Graham and R. B. Newell, “Fuzzy identification and
control of a liquid level rig,” Fuzzy Sets Syst ., vol. 26, pp. 255-273,
1988.
ment of this research. The assistance of Professor Zadeh
[211
[221
R EFER EN C ES
N. Baaklini and E. H. Mamdani, “Prescriptive methods for
deriving control policy in a fuzzy-logic controller,” Electron. Lett.,
J. Baldwin and N. Guild, “Modeling controllers using fuzzy
relations,” Kybernetes, vol. 9, pp. 223-229, 1980.
J. F. Baldwin and B. W. Pilsworth, “Axiomatic approach to
implication for approximate reasoning with fuzzy logic,” FuzzySets Syst., vol 3, pp. 193-219, 1980.
J. A. Bernard, “Use of rule-based system for process control,”IEEE Con tr. Syst. Mag., vol. 8 , no. 5 , pp. 3-13, 1988.
M. Braae and D. A. Rutherford, “Fuzzy relations in a control
setting,” Kybernetes, vol. 7, no. 3, pp. 185-188, 1978.
-, “Theoret ical and linguistic aspects of the fuzzy logic
controller,” Automat . , vol. 15, no 5, pp. 553-577, 1979.-, “Section of parameters for a fuzzy logic controller,” FuzzySets Syst., vol. 2, no. 3, pp. 185-199, 1979.
K. Ciliz, J. Fei, K. Usluel, and C. Isik, “Pratical aspects of the
knowledge-based control of a mobile robot motion,” in Proc.30th Midwest Symp. on Circuits and Systems, Syracuse, NY, 1987.
E. Czogala, Probabilistic Sets in Decision Making and Control.
E. Czogala, “Probabil istic fuzzy controller as a generalization of
the concept of fuzzy controller,” Fuzzy Sets Syst., vol. 26, pp.
vol. 11, pp. 625-626, 1975.
Cologne: Verlag TUV Rheinland, 1984.
..215-223, i988. .
E. Czoeala and K. Hirota. Probabilistic Sets: Fuzzv and StochasticApproach to Decision, Control and Recognition Processes.Cologne: Verlag TUV Rheinland, 1986.
E. Czogala and W. Pedrycz, “Some problems concerning theconstruction of algorithms of decision-making in fuzzy systems,”
Inr. J . Man. Mach. Studies, vol. 15, pp. 201-221, 1981.-, “On identification in fuzzy systems and its applications in
control problems,” Fuzzy Sets Syst. , vol. 6 , no. 1, pp. 73-83, 1981.
-, “Control problems in fuzzy systems,” Fuzzy Sets Syst., vol.
7, no. 3, pp. 257-274, 1982.-, , “Fuzzy rule generation for fuzzy control,” Cybem. Sys t .,v o l . 13, no. 3 , pp. 275-293, 1982.
E. Czogala and T. Rawlik, “Modelling of a fuzzy controller with
application to the control of biological processes,” Fuzzy Sets
B. Bharathi Devi and V. V. S. Sarma, “Estimation of fuzzy
memberships from histograms,” Inform. Sci . , vol. 35, pp. 43-59,
1985.D. Dubois and H. Prade, “Fuzzy logics and the generalized
modus ponens revisited,” Cybern. Syst., vol. 15, pp. 3-4, 1984.
-, “The generalized modus ponens under sup-min composi-
tion-A theoretical study.” in Approximate Reasoning in fipertSystems, M. M. Gupta , A. Kandel, W. Bandler, and J. B. Kiszka,
Eds.
-, “Unfair coins and necessity measures: Toward a possi-bilistic interpretation of histograms,” Fuzzy Sets Syst., vol. 10,no.
__, Possibility Theory: An App roach to Computerized Processingof Uncertainty. New York: Plenum Press, 1988.
J. Efstathiou, “Rule-based process control using fuzzy logic,” inApproximate Reasoning in Intelligent Systems, Decision and Con-trol, E. Sanchez and L. A. Zadeh, Eds. New York: Pergamon,
F. Fujitec, “FLEX-8800 series elevator group control system,”
Fujitec Co. , Ltd., Osaka, Japan, 1988.
Syst. , vol. 31, pp. 13-22, 1989.
Amsterdam: North-Holland , 1985, pp. 21 7-232.
1, pp. 15-20, 1985.
1987, pp. 145-158.
1311
-~Fuzzy adaptive control of a first-order process,” Fuzzy
1. Graham and P. L. Jones, Expert Sy,stems Know ledge, U ncertaintyand Decision.M. M. Gupta and Y. Tsukamoto, “Fuzzy logic controllers-A perspective,” in Proc. Joint Automatic Control Conf., San
Francisco, Aug. 1980. pp. FAIO-C.
M. M. Gupta, G. M. Trojan, and J. B. Kiszka, “Controllability of
fuzzy control systems,” IEEE Trans. Syst. Man Cybern., vol.
SMC-16, no 4, pp. 576-582, 1986.
K. Hirota, Y. Arai, and S. Hachisu, ”Moving mark recognition
and moving object manipulation in fuzzy controlled robot ,” Cont .Theory Ad v. Techno[.,vol. 2, no. 3, pp . 399-418, 1986.
K. Hirota and W. Pedrycz, “Analysis and synthesis of fuzzy
systems by the use of fuzzy sets,” Fuzzy Sets Syst., vol. 10, no 1 ,pp. 1-14, 1983.
C. Isik,“Identification and fuzzy rule-based control of a mobile
robot motion,” in Proc. IEEE Int. Symposium Intelligent Control,
Philadelphia, PA, 1987.0. toh, K. Gotoh, T. Nakayama, and S. Takamizawa, “Applica-
tion of fuzzy control to activated sludge process,” in Proc. 2ndIFSA Congress, Tokyo, Japan, July, 1987, pp. 282-285.
A. Jones, A Kaufmann, and H. J. Zimmermann, Fuzzy SetsTheory and Applications. Boston: D. Reidel Publishing Com-
pany, 1986.
J. Kacprzyk and S. A. Orlovski, Optimization Models using FuzzySets and Possibiliry Theory. Boston: D. Reidel Publishing Com-
pany, 1987.
J. Kacprzyk and M. Fedrizzi, Combining Fuzzy Imprecision withProbabilistic Uncertainty in Decision Making . New York:
Springer-Verlag, 1988.
A. Kandel, Fuzzy Techniques in Pattern Reco gnition. New York:
Wiley-Interscience, 1982.
Y. Kasai and Y. Morimoto, “Electronically controlled continu-
ously variable transmission,” in Proc. Int. Congress on Transporta-tion Electronics, Dearborn, MI, 1988.
A. Kaufmann, Introduction to Theory of Fuzzy Subsets. New
York: Academic, 1975.
A. Kaufmann and M. M. Gupta, Introduction to Fuzzy Arithmetic.New York: Van Nostrand, 1985.
-, Fuzzy Mathematical Models in Engineering and Manage-ment Science. Amsterdam: North-Holland, 1988.
M. Kelemen, Fuzziness and structural stability,” Kybernetes, vol.
W. J. M. Kickert, “Towards an analysis of linguistic modeling,”
Fuzzy Sets Syst., vol. 2, pp. 293-307, 1979.
-, “Further analysis and application of fuzzy logic control.”Interna l Rep. F/WK2/75 , Queen Mary College, London, 1975.
W. J. M. Kickert and H. R . Van Nauta Lemke, “Application of a
fuzzy controller in a warm water plant,” Automat . , vol. 12, no. 4,
W. J. M. Kickert and E. H. Mamdani, “Analysis of a fuzzy logic
J. Maiers and Y. S. Sherif, “Applications of fuzzy set theory,”
IEEE Trans. Syst. Man Cybern., vol. SMC-15, no. I , pp. 175-189,
1985.
E. H. Mamdani, “Applications of fuzzy algorithms for simple
dynamic plant,” Proc. IEE, vol. 121, no. 12, pp. 1585-1588, 1974.E. H. Mamdani and S. Assilian, “An experiment in linguistic
synthesis with a fuzzy logic controller,” Int. J. Man Mach. Stud-ies, vol. 7 , no 1, pp. 1-13, 1975.
E. H. Mamdani, “Advances in the linguistic synthesis of fuzzy
controllers,” Int. J. Man Mach. Studies, vol. 8, no. 6, pp. 669-678,
1976.
-, “Application of fuzzy logic to approximate reasoningusing linguistic synthesis,” IEEE Trans. Computer. vol. C-26, no.
~, “Applications of fuzzy set theory to control systems: asurvey,’’ in Fuzzy Autom ata an d Decision Processes, M. M. Gupta,
G. N. Sardis, and B. R. Gaines, Eds. Amsterdam: North-
Holland, 1977, pp. 77-88.
E. H. Mamdani and B. R. Gaines, Fuzzy Reasoning and itsApplications. London: Academic, 1981.
K. Matsushima and H. Sugiyama, “Human operator’s fuzzy modelin man-machine system with a nonlinear control object,” in FirstInt. Conf . on Fuzzy Information Processing, 1984.
M. Mizumoto, “Note on the arithmetic rule by Zadeh for fuzzy
conditional inference,” Cybern. Syst., vol. 12, pp. 247-306, 1981.
M. Mizumoto and H. Zimmermann, “Comparison of fuzzy rea-
soning methods,” Fuzzy Sets and Systems, vol. 8 , p ~ .53-283,
1982.
M. Mizumoto,“Comparison of various fuzzy reasoning methods,”
in Proc. 2nd IFSA Congress, Tokyo, Japan, July 1987, pp. 2-7.
-, “Fuzzy controls under various approximate reasoningmethods,” in Proc. 2nd IFSA Congress, Tokyo, Japan, July, 1987,
pp. 143-146.
S. Murakami, “Appl ication of fuzzy control ler to automobile
speed control system,” in Proc. of the IFAC Symp. on FuzzyInformation, Knowledge Representation and Decision Analysis,Marseille, France, 1983, pp. 43-48.
S. Murakami and M. Maeda, “Application of fuzzy controller toautomobile speed control system,” in Industrial Applications ofFuzzy Control, M. Sugeno, Ed. Amsterdam: North-Hol land,
Y. Murayama and T. Terano, “Optimizing control of diesel
engine,” in Industrial Applications of Fuzzy Control, M. Sugeno,
Ed. Amsterdam: North-Holland, 1985, pp. 63-72.C. V. Negoita, “On the stability of fuzzy systems,” in Proc. IEEEInt. Conf. on Cybernetics and Svciery, 1978, pp. 936-937.-, Expert Systems and Fuzzy Systems. Menlo Park: Ben-
jamin/Cummings Publishing Company, 1985.
A. Di Nola and A. G. S. Ventre, The Mathematics of FuzzySystems. Gesamtherstellung: Verlag TU V Rheinland, 1986.
223-240, 1985.
Englewood Cliffs, NJ: Prent ice Hall, 1988.
12, pp. 1182-1191, 1977.
1985, pp. 105-124.
(821
1891
I901
~911
[951
1961
11041
J. J. Ostergdad. “Fuzzy logic control of a heat exchange process,”
in Fuzzy Automata and Decision Processes, M. M. Gupta, G. N.
Saridis, and B. R. Gaines, Eds. Amsterdam: North-Holland,
1977, pp. 285-320.
S. K. Pal and D. K. Dutta Majumder, Fuzzy Mathematical Ap-proach to Pattern Recognition. New Delhi: Wiley Eastern Lim-
ited, 1986.
C. P. Pappis and E. H. Mamdani, “A fuzzy logic controller for a
traffic junction,” IEEE Trans. Syst. Man Cybern., vol. SMC-7, no.
W . Pedrycz, “An approach to the analysis of fuzzy systems,” Int.J. Control, vol. 34, no. 3, pp. 403-421, 1981.
-, “Applications of fuzzy relational equations for methods of
reasoning in presence of fuzzy data,” Fuzzy Sets Syst., vol. 16, pp.
H . Prade and C. V. Negoita, Fuzzy Logic in Kn owledge Engineer-ing. Gesamtherstellung: Verlag TUV Rheinland, 1986.
T. J. Procyk and E. H. Mamdani, “A linguistic self-organizing
process controller,” Automat . , vol. 15, no. 1, pp. 15-30, 1979.
G. P. Rao and D. A. Rutherford, “Approximate reconstruction
of mapping functions from linguistic description in problems of
fuzzy logic applied to system control,” Cybernet., vol. 12, no. 3,
pp. 225-236, 1981.
K. S. Ray and D. D. Majumder, “Application of circle criteria for
stability analysis of linear SISO and MIMO systems associated
with fuzzy logic controller,” IEEE Tran s. Syst. Man Cybern., vol.
SMC-14, no. 2, pp. 345-349, 1984.
D. A. Rutherford and G. C. Bloore, “The implementation of
fuzzy algorithms for control,” in Proc. IEEE, vol. 64, no. 4, pp.
572-573, 1976.D. A. Rutherford and G. A. Carter, “A Heuristic adaptive
controller for a sinter plant,” in Proc. 2nd IFAC Symp. onAutomation in Mining, Mineral and Metal Processing, Hohannes-
burg, RSA, Sept. 1976.
Y. Sakai, “A fuzzy controller in turning process automation,” in
Industrial Applications of Fuzzy Control, M. Sugeno, Ed. Amster-
dam: North-Holland, 1985, pp. 139-152.
E. Sanchez and L. A. Zadeh, Approximate R easoning in IntelligentSystems, Decision and Control.E. M. Scharf and N. J. Mandic, “The application of a fuzzy
controller to the control of a multi-degree-freedom robot arm,”
in Industrial Applications of Fuzzy Control, M. Sugeno, Ed. Ams-
terdam: North-Holland, 1985, pp. 41-62.
S. Shao, “Fuzzy self-organizing controll er and its application for
dynamic processes,” Fuzzy Sets Syst., vol. 26, pp. 151-164, 1988.
M. S. Stachowicz and M. E. Kochanska, “Fuzzy modeling of the
process,” in Proc. 2nd IFSA Congress, Tokyo, Japan, July 1987,
M. Sugeno and K. Murakami, “Fuzzy parking control of model
car,” in 23rd IEEE Conf. on Decision and Control, Las Vegas,
1984.
M. Sugeno and M. Nishida, “Fuzzy control of model car,” FuzzySets Syst., vol. 16, pp. 103-113, 1985.
M. Sugeno and K. Murakami, “An experimental study on fuzzy
parking control using a model car,” in Industrial Applications of
Fuzzy Control, M. Sugeno, Ed. Amsterdam: North-Holland,
M. Sugeno, “An introductory survey of fuzzy control,” Inform.
M. Sugeno and G. T. Kang, “Structure identification of fuzzy
model,” Fuzzy Sets Syst., vol. 28, no. I, pp. 15-33, 1988.
K. Sugiyama, “Analysis and synthesis of the rule based sel f-
organising controller,” Ph.D thesis, Queen Mary College, Univ.
of London, 1986.
T. Takagi and M. Sugeno, “Deriva tion of fuzzy control rules
from human operator’s control actions,” in Prvc. of the IFACSymp. on Fuzzy Information, Kn owledge Representation and Deci-sion Analysis, Marseilles, France, July 1983, pp. 55-60.
-, “Fuzzy identification of systems and its applications tomodeling and control,” IEEE Trans. Syst. Man Cybern., vol.
SMC-15, no. I, pp. 116-132, 1985.
K. L. Tang and R. J. Mulholland, “Comparing fuzzy logic with
classical controller designs,” IEEE Trans. Syst. Man Cyhern., vol.
SMC-17, no. 6, pp. 1085-1087, 1987.
R. Tanscheit and E. M. Scharf, “Experiments with the use of a
LEE: F U Z Z Y LOGIC IN CONTROI. S Y S T E M S : F U Z Z Y 1.0cilC CONTR0I.I FR-PART II 435
rule-based self-organising controller for robotics applications,”
Fuzzy Sets Syst., vol. 26, pp. 195-214, 1988.
M. Togai and H. Watanabe. “Expert system on a chip: An engine
for real-time approximate reasoning,” IEEE Expert Syst. Mag.,
M. Togai and S. Chiu, “A fuzzy accelerator and a programming
environment for real-time fuzzy control,” in Prvc. 2nd IFSA [I321Congress, Tokyo, Japan, July 1987, pp. 147-151.
R. M. Tong, “Analysis of fuzzy control algorithms using therelation matrix,’’ Int . J . Man Mach. Studies, vol. 8 , no. 6, pp .
[ 1291
[I301[I071
vol. 1, pp. 55-62, 1986. [I311
[lo81
[lo91[133]
679-686, 1976.
[110] -, “A control engineering review of fuzzy systems,” Automa. ,
vol. 13, no. 6, pp. 559-569, 1977.[111] -, “Synthesis of fuzzy models for industrial processes,” Int .
Gen. Sys t ., vol. 4, pp. 143-162, 1978.
[112] -, “The evaluation of fuzzy models derived from experimen-tal data,” Fuzzy Sets Syst., vol. 4, pp. 1-12, 1980.
[113] R. M. Tong, M. B. Beck, and A. Latten, “Fuzzy control of theactivated sludge wastewater treatment process,” Automat . , vol.16, no. 6, pp. 695-701, 1980.
[114] R. M. Tong, “A retrospective view of fuzzy control systems,”Fuzzy Sets Syst., vol. 14, pp. 199-210, 1984.
[115] -, “An annotated bibliography of fuzzy control,” in Indus-
11211
[1221
trial Applications of Fuzzy Corkol, M. Sugeno, Ed. Amsterdam:
North-Hol land, 1985, pp. 249-269.
E. Trillas and L. Valverde, “On mode and implication in approxi-
mate reasoning,” in Approximate Reasoning in Expert Systems,M. M. Gupta, A. Kandel, W. Bandler, and J. B. Kiszka. Eds.
Amsterdam: North-Holland, 1985, pp. 157-166.
Y. Tsukamoto, “An approach to fuzzy reasoning method,” inAdvances in Fuzzy Set Theory and Applications, M. M. Gupta,
R. K. Ragade, and R. R. Yager, Eds. Amsterdam: North-
Holland, 1979.I. G. Umbers and P. J. King, “An analysis of human-decision
making in cement kiln control and the implications for automa-
tion,” Int. J . Man Mach . Studies, vol. 12, no. 1, pp. 11-23, 1980.
M. Uragami, M. Mizumoto, and K. Tananka, “Fuzzy robot
controls,” Cy b e m. ,vol. 6, pp. 39-64, 1976.
H. Watanabe and W. Dettloff, “Reconfigurable fuzzy logic pro-
cessor: A full custom digital VLSI,” in Int. Workshop on FuzzySystem Applications, Iizuka, Japan, Aug. 1988, pp. 49-50.D. Willaeys, “Optimal control of fuzzy systems,” in Proc. Inr.Congress on Applied Systems Research and Cybernetics, Acapulco,
Dec. 1980.
-, “Decision making with possibilistic dynamic systems,” inProc. 20th IEEE Conf. on Decision and Control, San Diego, Dec.
1981.
D. Willaeys and N.Malvache, “Use of fuzzy model for process
control,” in Proc. IEEE Int. Con f. on Cybernetics and Society,
-, “Contribution of the fuzzy sets theory to man-machine
system,” in Advances in Fuzzy Set Theory and Applications, M. M.Gupta, R. K. Ragade, and R. R. Yager, Eds. Amsterdam:
North-Hol land, 1979, pp. 481-500.
C. W. Xu and Y. Zailu, “Fuzzy model identification and self-learning for dynamic systems,” IEEE Trans. Syst . Man Cy bem .,vol. SMC-17, no. 4, pp. 683-689, 1987.R. R. Yager, S. Ovchinnikov, R. M. Tong, and H. T. Nguyen,
Fuzzy Sets and Applications: Selected Papers by L . A . Z ad eh .New York: Wiley-Interscience, 1987.
0. Yagishita, 0. Itoh, and M. Sugeno, “Application of fuzzyreasoning to the water purification process,” in Industrial Appli-cations of Fuzzy Control, M. Sugeno, Ed. Amsterdam: North-
Holland, 1985, pp. 19-40.
1978, pp. 942-946.
1341
1351
1361
[139]
T. Yamakawa and K. Sasaki, “Fuzzy memory device,” in Prvc.2nd IFSA Congrevs, Tokyo. Japan. July 1987, pp. 551-555.
T. Yamakawa. “High speed fuzzy control ler hardware system.” in
Prvc. 2nd Fuzzy Sy wm Symp. . Japan, 1986. pp. 122-130.
-, “Fuzzy controller hardware system,” in Prvc. 2nd IFSACongress, Tokyo. Japan, July 1987.
~, “A simple fuzzy computer hardware system employingmin and max operations-A challenge to 6th generation com-
puter,” in Proc. 2nd IFSA Congress, Tokyo, Japan, July 1987.T. Yamakawa, “Fuzzy microprocessors-Rule chip and defuzzi-
fier chip,” in Int. W orkshop on Fuzzy System Applications, Iizuka,
Japan, Aug. 1988, pp. 51-52.
T. Yamazaki and M. Sugeno, “A microprocessor based fuzzycontroller for industrial purposes,” in Industrial Applications of
Fuzzy Control, M. Sugeno, Ed. Amsterdam: North-Holland,
S. Yasunobu, S. Miyamoto, and H. Ihara, “Fuzzy control for
automatic train operation system,” in Prvc. 4 th IFAC/IFIP/IFORS Int. Congress on Control in Transportation Sy.stems, Baden-
Baden, April 1983.S. Yasunobu and S. Miyamoto, “Automatic train operation by
predictive fuzzy control,” in Industrial Application of Fuzzy Con-trol, M. Sugeno, Ed. Amsterdam: North-Holland, 1985, pp .1-18.
S . Yasunobu and T. Hasegawa, “Evaluation of an automatic
container crane operation system based on predictive fuzzy con-
~, “Predictive fuzzy control and its application for automatic
container crane operation system,” in Proc. 2nd IFSA Congress,
Tokyo, Japan, July 1987, pp. 349-352.S. Yasunobu, S. Sekino, and T. Hasegawa, “Automatic train
operation and automatic crane operation systems based on pre-
dictive fuzzy control,” in Proc. 2nd IFSA Congress, Tokyo, Japan,
M. Yonekara, “The application of fuzzy sets theory to the tem-
perature of box annealing furnaces using simulation techniques,”
in Proc. 8th IFAC World Congress, Tokyo, 1981.L. A. Zadeh, “Fuzzy sets,” Informat. Control, vol. 8 , pp. 338-353,
1965.
-, “Fuzzy algorithm,” Informal. Control, vol. 12, pp. 94-102,1968.~, “Toward a theory of fuzzy systems,” in Aspects of Networkand System Theory, R. E. Kalman and N. DeClaris, Ed. New
York: Holt, Rinehart and Winston, 1971, pp. 469-490.
1985, pp. 231-240.
July 1987, pp. 835-838.
-, “Similarity relations and fuzzy orderings,” Informat. Sci.,vol. 3. pp. 177-200, 1971...~, “A rationale for fuzzy control,” Trans . ASME , J . Llynam.Syst. Measur. Control, vol. 94, pp. 3-4, 1972.
-, “Outline of a new approach to the analysis complexsystems and decision processes,” IEEE Trans. Syst. Man Cybern.,
-, “Th e concept of a linguistic variable and its application to
[I281 T. Yamakawa ‘and T. Miki, “Th e current mode fuzzy logicintegra ted circuits fabricated by the standard CMOS process,”IEEE Trans. Computer, vol. C-35, no. 2, pp. 161-167, 1986.
Chuen Chien Lee (S’88) for a biography and photograph, please see