Scott R. Sideleau, NUWC Newport: Architecture Lead Darren Powell, SSC Pacific: Software Lead Lynn M. Ewart, Ph.D., NUWC Newport: Execution Manager Jeffrey G. Morrison, Ph.D., Office of Naval Research: Program Officer 27-OCT-2016 Control Station Human Machine Interface (CaSHMI) An Implemented Use Case of Unmanned Systems (UxV) Command and Control (C2) via a Standards-based Enterprise Architecture
Transcript
Scott R. Sideleau, NUWC Newport: Architecture Lead
Darren Powell, SSC Pacific: Software Lead
Lynn M. Ewart, Ph.D., NUWC Newport: Execution Manager
Jeffrey G. Morrison, Ph.D., Office of Naval Research: Program Officer
27-OCT-2016
Control Station Human Machine Interface (CaSHMI) An Implemented Use Case of Unmanned Systems (UxV)
Command and Control (C2) via a Standards-based Enterprise Architecture
• Several competing industry/government approaches to Unmanned Vehicle (UxV) Command & Control (C2) UIs – Tight coupling between Vehicle Control and UIs
• Monolithic software – Expensive to maintain
– Difficult to extend
– Lack of modularity or insufficient scope of modularity
– Loose coupling to open standards • UI design
– Lack of Human Factors Engineering (HFE) influence
– Inconsistent or nonexistent use of Common Symbology
• Data models – Mixed use between vendors
– Mixed use between robot operating domains (e.g. air, surface, subsurface, ground, etc)
• Communications – C2 of platforms using open standards often an afterthought
– Industry often has purview over proprietary “on the wire” C2 protocols
3
How do you extend today’s C2 applications?
In the not too distant past…
• Several competing industry/government approaches to Unmanned Vehicle (UxV) Command & Control (C2) UIs – Tight coupling between Vehicle Control and UIs
• Monolithic software – Expensive to maintain
– Difficult to extend
– Lack of modularity or insufficient scope of modularity
– Loose coupling to open standards • UI design
– Lack of Human Factors Engineering (HFE) influence
– Inconsistent or nonexistent use of Common Symbology
• Data models – Mixed use between vendors
– Mixed use between robot operating domains (e.g. air, surface, subsurface, ground, etc)
• Communications – C2 of platforms using open standards often an afterthought
– Industry often has purview over proprietary “on the wire” C2 protocols
4
Traditional Example
5
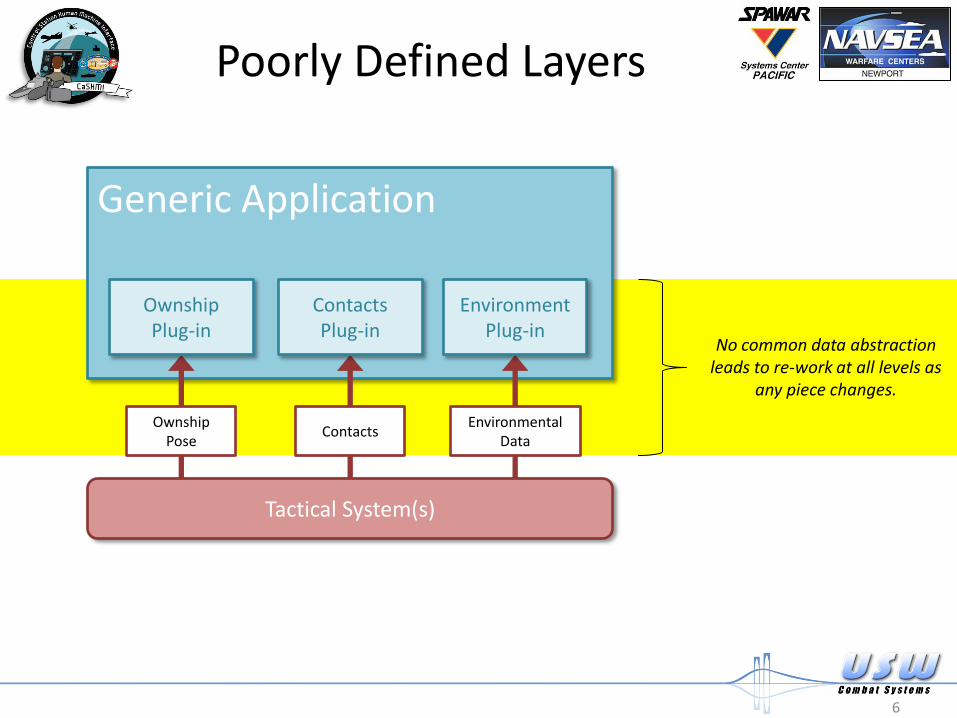
Generic Application
Tactical System(s)
Ownship Pose
Contacts Environmental
Data
Ownship Plug-in
Contacts Plug-in
Environment Plug-in
Poorly Defined Layers
6
Generic Application
Tactical System(s)
Ownship Pose
Contacts Environmental
Data
Ownship Plug-in
Contacts Plug-in
Environment Plug-in
No common data abstraction leads to re-work at all levels as
any piece changes.
Traditional UxV C2 Example
7
UxV C2 Application
Tactical System(s)
Ownship Pose
Contacts Environmental
Data
Ownship Plug-in
Contacts Plug-in
Environment Plug-in
UxV Control Plug-in
UxV
Prone to Re-work when Scaled
8
UxV C2 Application
Tactical System(s)
Ownship Pose
Contacts Environmental
Data
Ownship Plug-in
Contacts Plug-in
Environment Plug-in
UxV Control Plug-in UxV
UxV Control Plug-in UxV
• UxV C2 Plug-in delivers both platform agnostic and platform specific functionality
• Platform agnostic features re-worked for each new UxV
• Results in minor implementation differences or “quirks” between UxV C2 within the same application
• Increased complexity and cost to maintain
Example Summary
• Existing UxV C2 approaches are problematic: – Lack sufficient data abstraction to promote maintainability and usability
• Often fail to apply a cohesive open standards approach
– Are prone to systemic re-work when scaled • Often leading to disparity between seemingly “common” C2 tasks
9
Unmanned Systems & Open Architecture
▼ Open Architecture Benefits
Reduce life-cycle costs
− Training
− Logistics
Adapt to evolving future requirements
Mitigate vendor lock
Create competition
− Lower cost
− Improved technology
Component reuse between programs
▼ How to define configuration item granularity?
Review the benefits above!
10/27/2016 Distribution A 10
CaSHMI becomes an use case of MOSA for UxVs
UCS Multi-Domain Extension (MDE)
10/27/2016 Distribution A 11
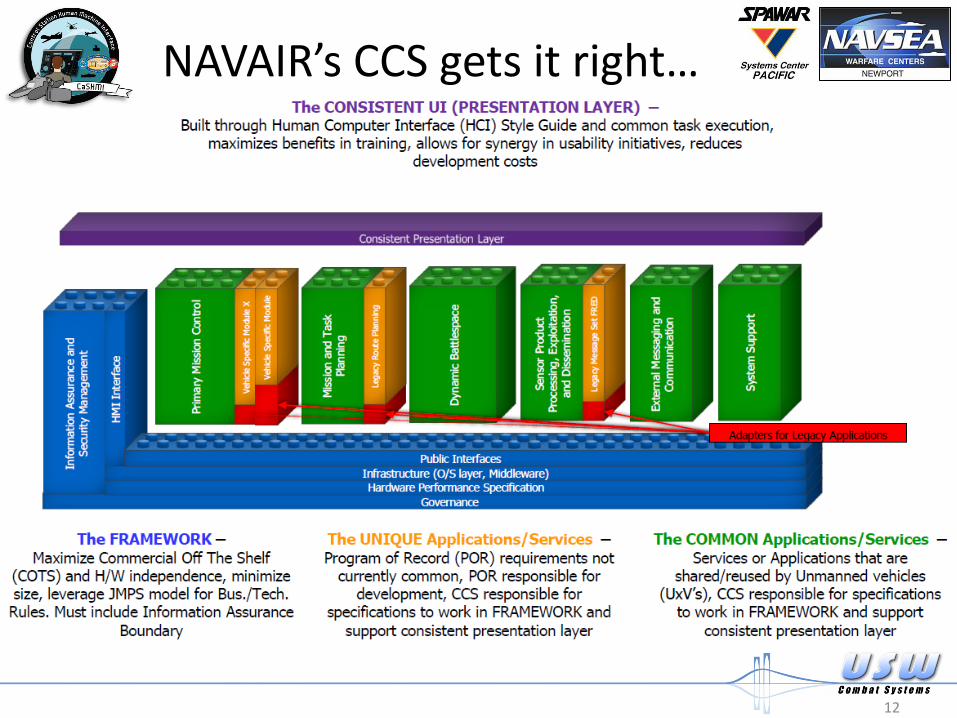
NAVAIR’s CCS gets it right…
12
…and we think CaSHMI does too. (Human-Machine Interface focused)
13
NAVAIR’s CCS gets it right…
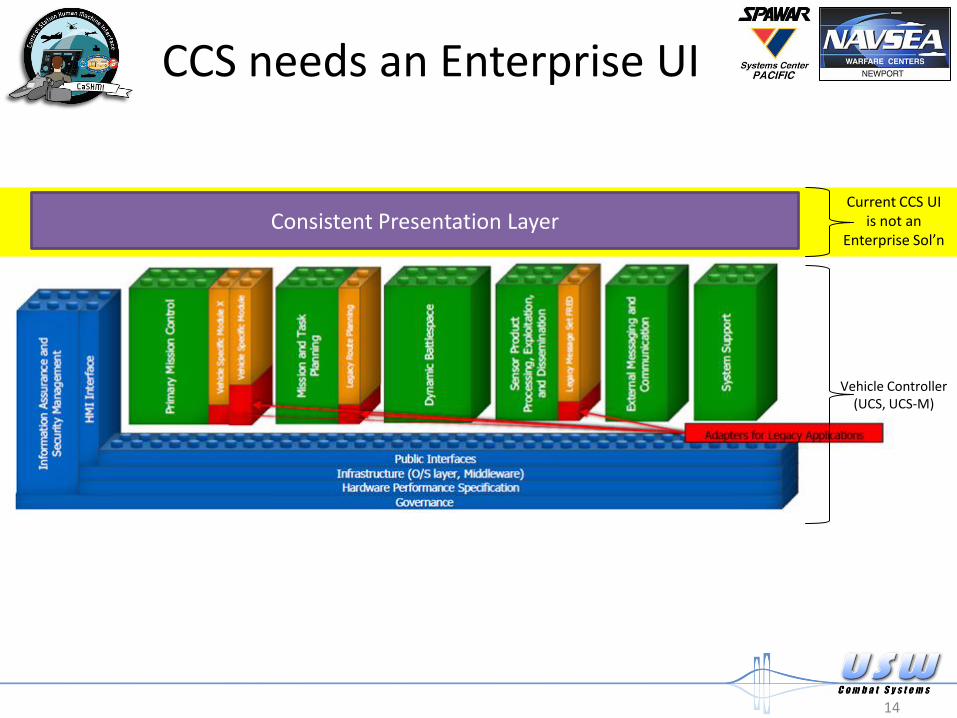
CCS needs an Enterprise UI
14
Current CCS UI is not an
Enterprise Sol’n Consistent Presentation Layer
Vehicle Controller (UCS, UCS-M)
CaSHMI is an HFE design – an Enterprise UI – for UxV Supervisory Control.
15
CCS needs an Enterprise UI
16
CaSHMI is an
Enterprise UI CaSHMI
Vehicle Controller (UCS, UCS-M)
CaSHMI Design Process
17
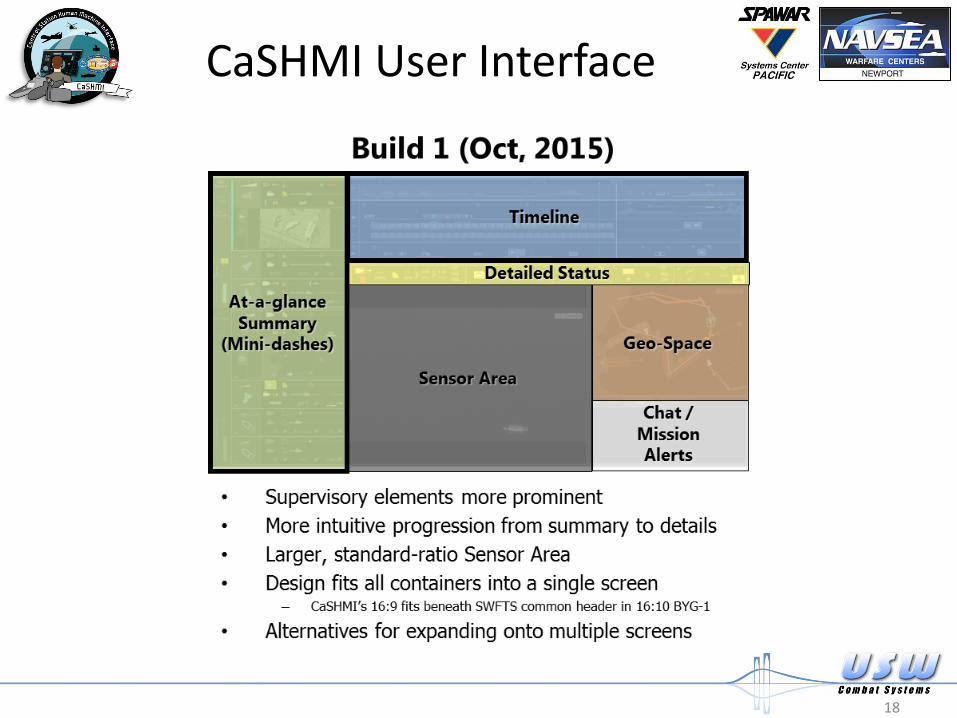
CaSHMI User Interface
18
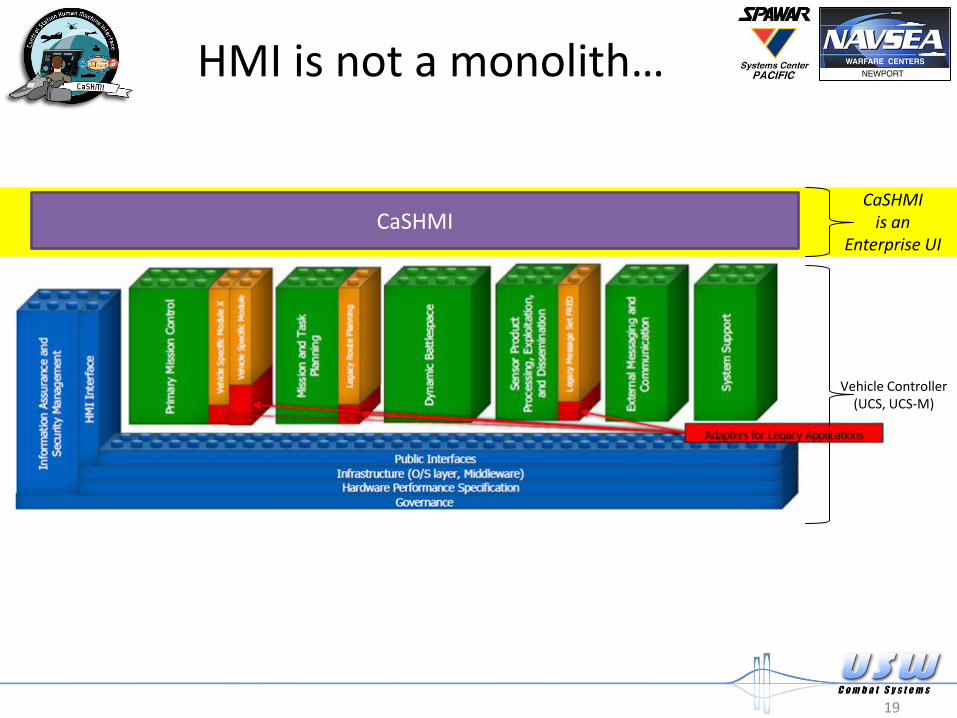
HMI is not a monolith…
19
CaSHMI is an
Enterprise UI CaSHMI
Vehicle Controller (UCS, UCS-M)
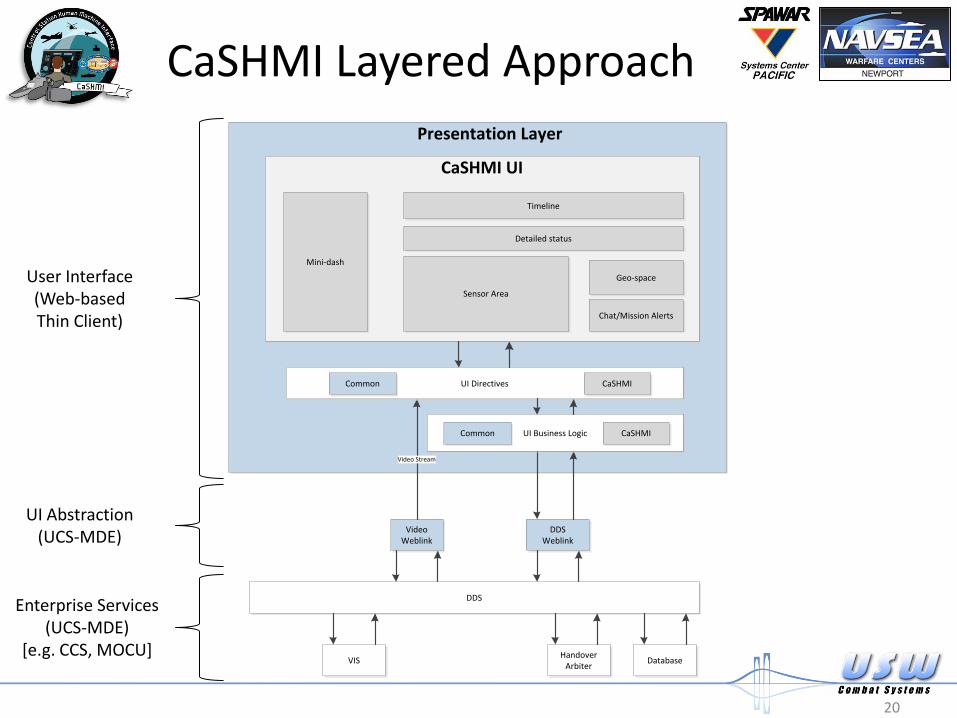
CaSHMI Layered Approach
Timeline
Mini-dash
Sensor Area
Geo-space
Chat/Mission Alerts
Detailed status
DDSWeblink
Video Weblink
DDS
Handover Arbiter
Video Stream
Database
CaSHMI UI
VIS
UI Directives
UI Business Logic
Presentation Layer
Common CaSHMI
Common CaSHMI
Enterprise Services (UCS-MDE)
[e.g. CCS, MOCU]
User Interface (Web-based Thin Client)
20
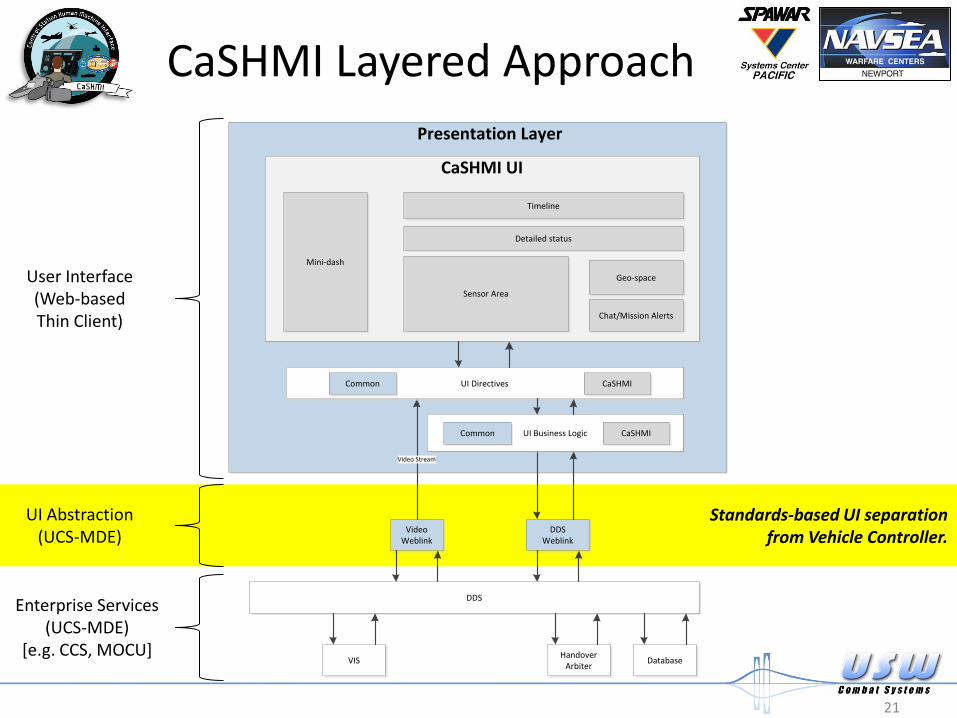
UI Abstraction (UCS-MDE)
Standards-based UI separation from Vehicle Controller.
CaSHMI Layered Approach
Timeline
Mini-dash
Sensor Area
Geo-space
Chat/Mission Alerts
Detailed status
DDSWeblink
Video Weblink
DDS
Handover Arbiter
Video Stream
Database
CaSHMI UI
VIS
UI Directives
UI Business Logic
Presentation Layer
Common CaSHMI
Common CaSHMI
User Interface (Web-based Thin Client)
21
UI Abstraction (UCS-MDE)
Enterprise Services (UCS-MDE)
[e.g. CCS, MOCU]
Identifying Common Elements & Business Logic
Common, re-usable UI elements
Presentation Layer
UI Business Logic
CaSHMI UI – Mini-Dash
DDS
Handover Arbiter
DatabaseVIS
CaSHMI ServicesCommon Services
UI Directives
CaSHMI Directives
Common Directives
DDSWeblink
VideoWeblink
ucsMissionPlanner
robot
elevation
util
units
contact Manager
contact timelineData
ngDialogelement-
swap
indicators
liveVideocomm-status
toggle-switch
leaflet-marker
leaflet-polyline
timeline
joystick
circle-menu
battery-status
angular
avatar
UI-bootstrap
bw-nav
bw-gcs-comms
camera-control
bw-target
route-editor
datalink-rate
routeElevationSeries
vehicle-control
Mission Overview
Priority Summary
Control Level & Status
Progress
Vehicle
Collection
Collection & Geo Preview
Onboard Sensors
22
Business Logic
Clear separation between common elements and
business logic.
Identifying Common Elements & Business Logic
Common, re-usable UI elements
Presentation Layer
UI Business Logic
CaSHMI UI – Mini-Dash
DDS
Handover Arbiter
DatabaseVIS
CaSHMI ServicesCommon Services
UI Directives
CaSHMI Directives
Common Directives
DDSWeblink
VideoWeblink
ucsMissionPlanner
robot
elevation
util
units
contact Manager
contact timelineData
ngDialogelement-
swap
indicators
liveVideocomm-status
toggle-switch
leaflet-marker
leaflet-polyline
timeline
joystick
circle-menu
battery-status
angular
avatar
UI-bootstrap
bw-nav
bw-gcs-comms
camera-control
bw-target
route-editor
datalink-rate
routeElevationSeries
vehicle-control
Mission Overview
Priority Summary
Control Level & Status
Progress
Vehicle
Collection
Collection & Geo Preview
Onboard Sensors
23
Business Logic
Field Experimentation
24
ANTX 2016
CaSHMI Focus: Enable simultaneous C2 of cross-domain UxVs…
25
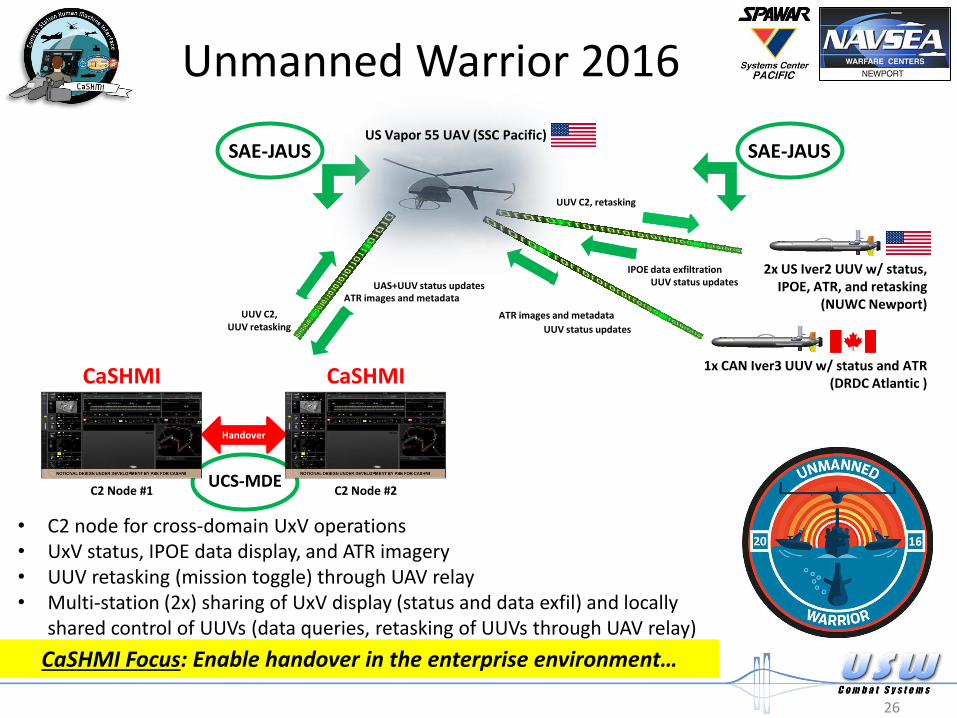
Unmanned Warrior 2016
UCS-MDE
2x US Iver2 UUV w/ status, IPOE, ATR, and retasking
(NUWC Newport)
1x CAN Iver3 UUV w/ status and ATR (DRDC Atlantic )
UUV C2, UUV retasking
ATR images and metadata
SAE-JAUS
UAS+UUV status updates
UUV C2, retasking
UUV status updates IPOE data exfiltration
UUV status updates
ATR images and metadata
SAE-JAUS
C2 Node #2
CaSHMI CaSHMI
Handover
C2 Node #1
US Vapor 55 UAV (SSC Pacific)
CaSHMI Focus: Enable handover in the enterprise environment…
• C2 node for cross-domain UxV operations • UxV status, IPOE data display, and ATR imagery • UUV retasking (mission toggle) through UAV relay • Multi-station (2x) sharing of UxV display (status and data exfil) and locally
shared control of UUVs (data queries, retasking of UUVs through UAV relay)