Page 1
CSE 167:
Introduction to Computer GraphicsIntroduction to Computer Graphics
Lecture #2: Coordinate Transformations
Jürgen P. Schulze, Ph.D.
University of California, San Diego
Fall Quarter 2011
Page 2
Announcements
� Homework #1 due Friday Sept 30, 1:30pm; presentation in lab 260
� Don’t save anything on the C: drive of the lab PCs in Windows. You will lose it when you log out!
2
Page 3
Overview
� Linear Transformations
� Homogeneous Coordinates
� Affine Transformations
� Concatenating Transformations
� Change of Coordinates� Change of Coordinates
� Common Coordinate Systems
3
Page 4
Linear Transformations
� Scaling, shearing, rotation, reflection of vectors, and combinations thereof
� Implemented using matrix multiplications
4
Page 5
Scaling
� Uniform scaling matrix in 2D
� Analogous in 3D
5
Page 6
Scaling
� Nonuniform scaling matrix in 2D
� Analogous in 3D
6
Page 7
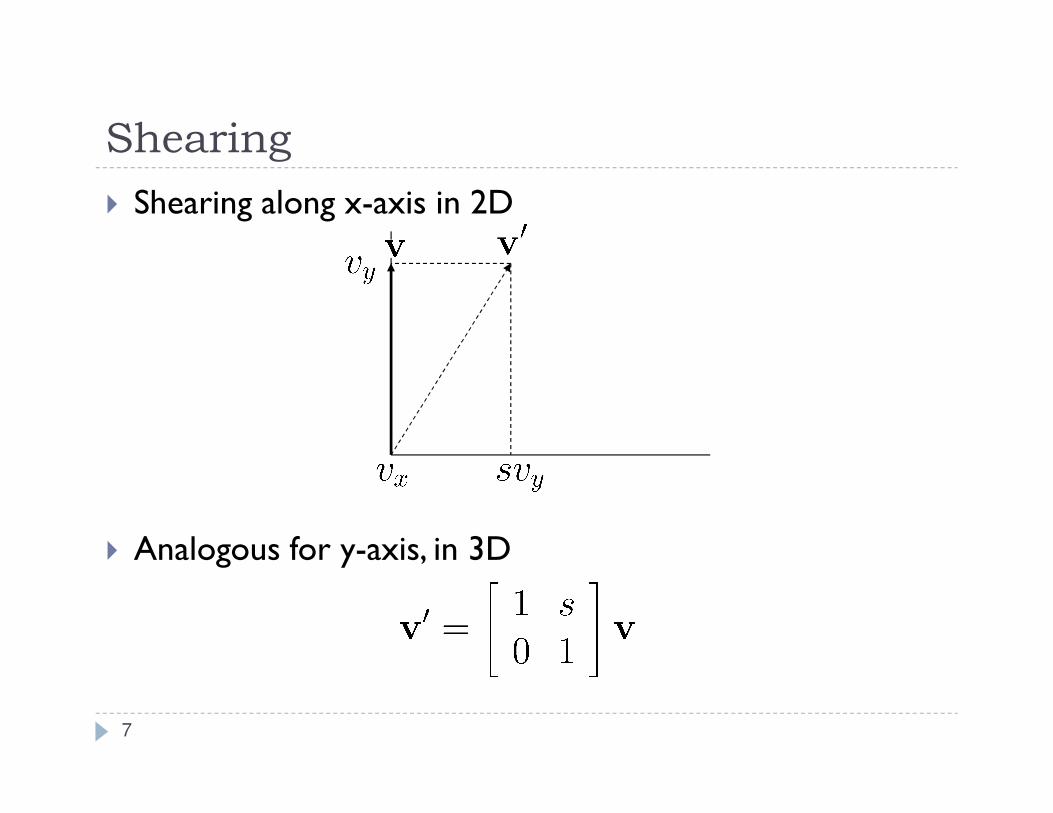
Shearing
� Shearing along x-axis in 2D
� Analogous for y-axis, in 3D
7
Page 8
Rotation in 2D
� Convention: positive angle rotates counterclockwise
� Rotation matrix
8
Page 9
Rotation in 3D
Rotation around coordinate axes
9
Page 10
Rotation in 3D
� Concatenation of rotations around x, y, z axes
� are called Euler angles
� Result depends on matrix order!� Result depends on matrix order!
10
Page 11
Rotation in 3D
Around arbitrary axis
� Rotation axis a
R(a,θ ) =
1+ (1 − cos(θ ))(ax
2− 1) −a
zsin(θ ) + (1− cos(θ))a
xa
ya
ysin(θ) + (1 − cos(θ ))a
xa
z
azsin(θ ) + (1− cos(θ ))a
ya
x1+ (1− cos(θ))(a
y
2− 1) −a
xsin(θ) + (1 − cos(θ))a
ya
z
−aysin(θ) + (1− cos(θ ))a
za
xa
xsin(θ ) + (1− cos(θ ))a
za
y1+ (1− cos(θ))(a
z
2− 1)
� Rotation axis a
� a must be a unit vector:
� Right-hand rule applies for direction of rotation
� Counterclockwise rotation
a = 1
11
Page 12
Overview
� Linear Transformations
� Homogeneous Coordinates
� Affine Transformations
� Concatenating Transformations
� Change of Coordinates� Change of Coordinates
� Common Coordinate Systems
12
Page 13
Homogeneous Coordinates
� Generalization: homogeneous point
� Homogeneous coordinate
Corresponding 3D point: divide by homogeneous � Corresponding 3D point: divide by homogeneous coordinate
13
Page 14
Homogeneous coordinates
� Usually for 3D points you choose
� For 3D vectors
� Benefit: same representation for vectors and points
14
Page 15
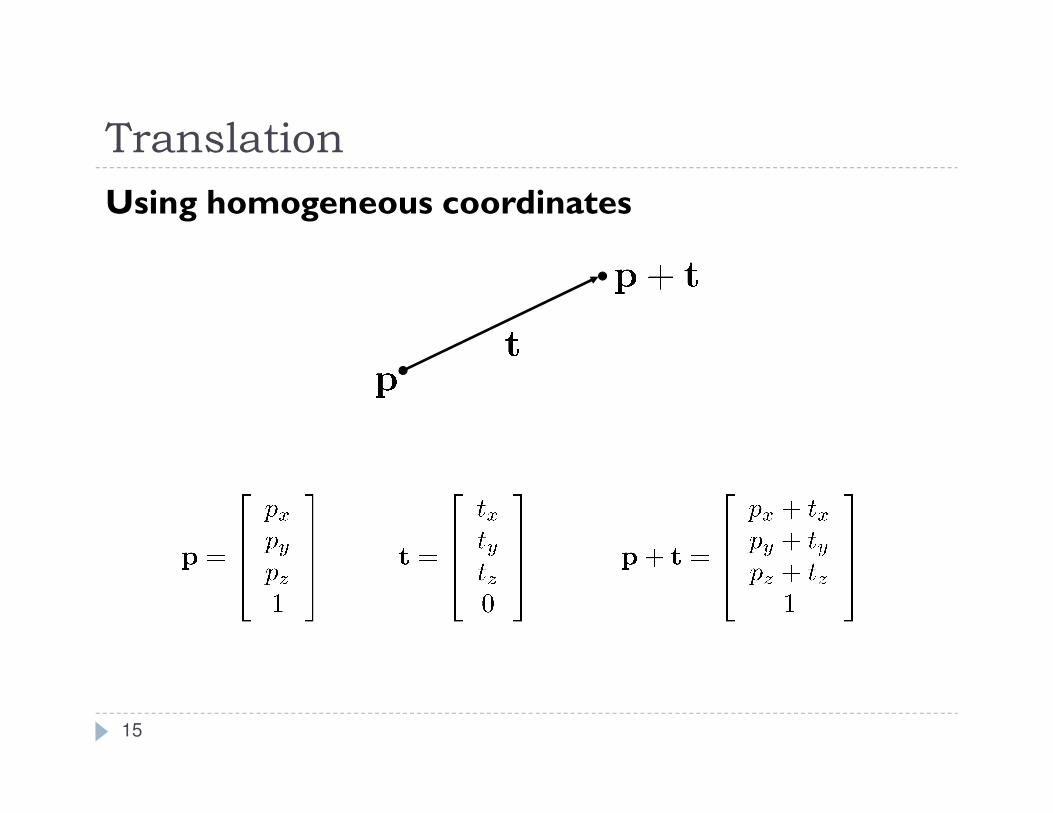
Translation
Using homogeneous coordinates
15
Page 16
Translation
Using homogeneous coordinates
Matrix notationMatrix notation
Translation matrix
16
Page 17
Transformations
� Add 4th row/column to 3 x 3 transformation matrices
� Example: rotation
17
Page 18
Transformations
Concatenation of transformations:
� Arbitrary transformations (scale, shear, rotation, translation)
� Build “chains” of transformations
� Result depends on order� Result depends on order
18
Page 19
Overview
� Linear Transformations
� Homogeneous Coordinates
� Affine Transformations
� Concatenating Transformations
� Change of Coordinates� Change of Coordinates
� Common Coordinate Systems
19
Page 20
Affine transformations
� Generalization of linear transformations
� Scale, shear, rotation, reflection (linear)
� Translation
� Preserve straight lines, parallel lines
� Implementation using 4x4 matrices and homogeneous Implementation using 4x4 matrices and homogeneous coordinates
20
Page 22
Translation
• Inverse translation
22
Page 23
Scaling
• Origin does not change
23
Page 24
Scaling
� Inverse of scale:
24
Page 25
Shear
� Pure shear if only one parameter is non-zero
25
Page 26
Rotation around coordinate axis
� Origin does not change
26
Page 27
Rotation around arbitrary axis
� Origin does not change
� Angle , unit axis a
�
27
Page 28
Rotation matrices
� Orthonormal
� Rows, columns are unit length and orthogonal
� Inverse of rotation matrix:
� Its transpose
28
Page 29
Overview
� Linear Transformations
� Homogeneous Coordinates
� Affine Transformations
� Concatenating Transformations
� Change of Coordinates� Change of Coordinates
� Common Coordinate Systems
29
Page 30
Rotating with pivot
Rotation around
originRotation with
pivot
30
Page 31
Rotating with pivot
1. Translation 2. Rotation 3. Translation
31
Page 32
Concatenating transformations
� Arbitrary sequence of transformations
� Note: associativity
32
Page 33
Overview
� Linear Transformations
� Homogeneous Coordinates
� Affine Transformations
� Concatenating Transformations
� Change of Coordinates� Change of Coordinates
� Common Coordinate Systems
33
Page 34
Change of coordinates
� Point with homogeneous coordinates
� Position in 3D given with respect to a coordinate system
34
Page 35
Change of coordinates
New uvwq
coordinate system
Goal: Find coordinates of with respect to
new uvwq coordinate system35
Page 36
Change of coordinates
Coordinates of xyzo frame w.r.t. uvwq frame
36
Page 37
Change of coordinates
Same point p in 3D, expressed in new uvwq frame
37
Page 38
Change of coordinates
38
Page 39
Change of coordinates
Inverse transformation
� Given point w.r.t. frame
� Coordinates w.r.t. frame
39
Page 40
Overview
� Linear Transformations
� Homogeneous Coordinates
� Affine Transformations
� Concatenating Transformations
� Change of Coordinates� Change of Coordinates
� Typical Coordinate Systems
40
Page 41
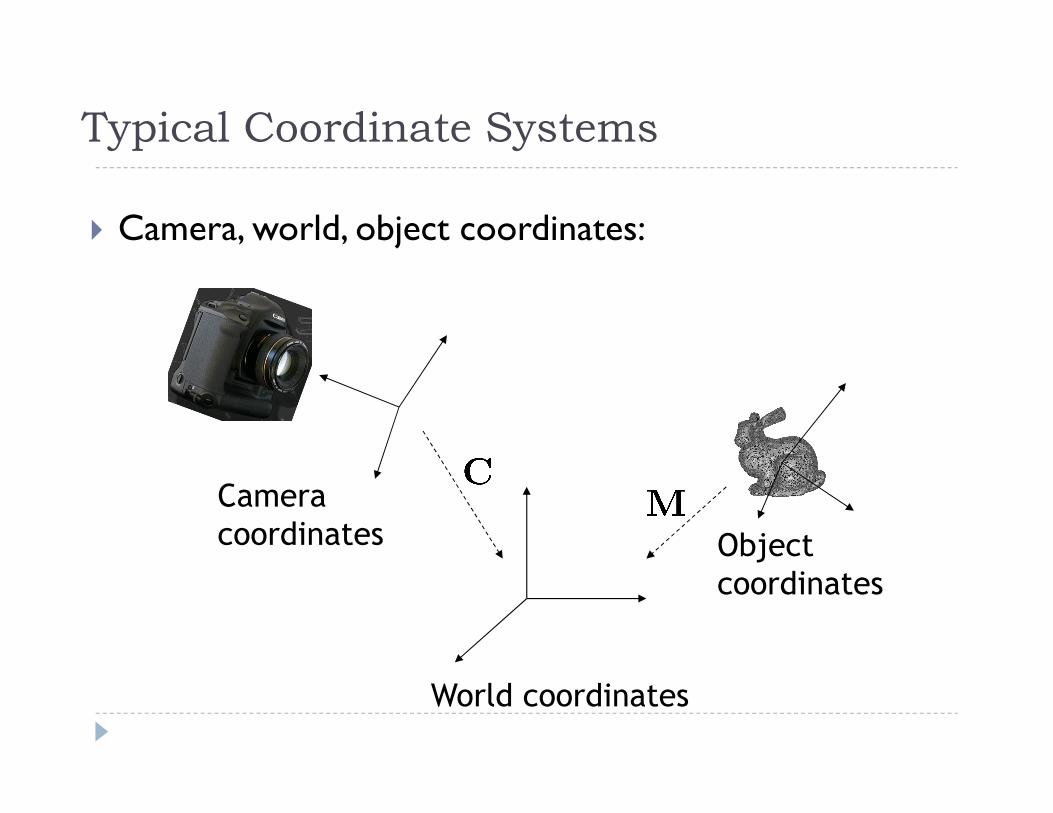
Typical Coordinate Systems
� Camera, world, object coordinates:
World coordinates
Object
coordinates
Camera
coordinates
Page 42
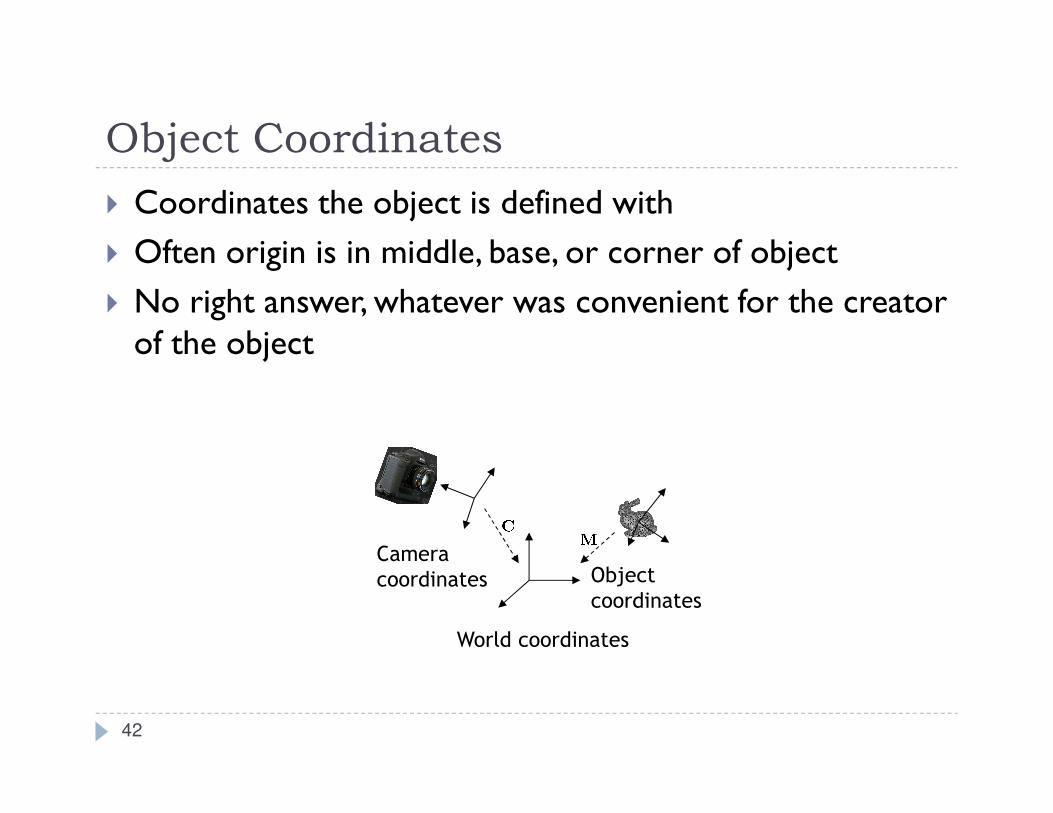
Object Coordinates
� Coordinates the object is defined with
� Often origin is in middle, base, or corner of object
� No right answer, whatever was convenient for the creator of the object
World coordinates
Object
coordinates
Camera
coordinates
42
Page 43
World Coordinates
� “World space”
� Common reference frame for all objects in the scene
� Chosen for convenience, no right answer
� If there is a ground plane, usually x/y is horizontal and z points up (height)
� In OpenGL x/y is screen plane, z comes out
World coordinates
Object
coordinates
Camera
coordinates
43
Page 44
World Coordinates
� Transformation from object to world space is different for each object
� Defines placement of object in scene
� Given by “model matrix” (model-to-world transform) M
World coordinates
Object
coordinates
Camera
coordinates
44
Page 45
Camera Coordinate System
� “Camera space”
� Origin defines center of projection of camera
� x-y plane is parallel to image plane
� z-axis is perpendicular to image plane
World coordinates
Object
coordinates
Camera
coordinates
45
Page 46
Camera Coordinate System
� The Camera Matrix defines the transformation from camera to world coordinates
� Placement of camera in world
� Transformation from object to camera coordinates
World coordinates
Object
coordinates
Camera
coordinates
46
Page 47
Camera Matrix
� Construct from center of projection e, look at d, up-vector up:
World coordinates
Camera
coordinates
47
Page 48
Camera Matrix
� Construct from center of projection e, look at d, up-vector up:
World coordinates
Camera
coordinates
48
Page 49
Camera Matrix
� z-axis
� x-axis
� y-axis
49
Page 50
Inverse of Camera Matrix
� How to calculate the inverse of the camera matrix C-1?
� Generic matrix inversion is complex and compute-intensive
� Observation:
� camera matrix consists of rotation and translation: R x Tcamera matrix consists of rotation and translation: R x T
� Inverse of rotation: R-1 = RT
� Inverse of translation: T(t)-1 = T(-t)
� Inverse of camera matrix: C-1 = T-1 x R-1
50
Page 51
Objects in Camera Coordinates
� We have things lined up the way we like them on screen
� x to the right
� y up
� -z going into the screen
� Objects to look at are in front of us, i.e. have negative z values
But objects are still in 3D� But objects are still in 3D
� Next step: project scene into 2D
51
Page 52
Next Lecture
� Rendering Pipeline
� Perspective Projection
52