CTHULHU: The Design and Implementation of Duke Robotics Club’s 2019 AUVSI Competition Entry Samuel Rabinowitz, Eric Chang, David Miron, Estelle He, Neil Dhar, Christopher Wolff, Trevor Fowler Abstract— In 2019, the Duke Robotics Club returns for their third year in recent history to the AUVSI RoboSub Competition with a brand new, smaller, leaner, and more maneuverable robot: Cthulhu. Successor to the team’s previous robot, Leviathan, Cthulhu is the brainchild of the dozens of Duke engineers that make up the student-run Duke Robotics Club. Work on Cthulhu, split between three different subsystem teams (subteams), began in fall of 2018. The new robot features a more compact design (2/3 the size of Leviathan), a redesigned electronics stack, and modularity for greater interaction with the environment. Additionally, the software team successfully transitioned from an unmaintainable legacy codebase to Docker and ROS, which are industry standards. The team is also an active member of the Durham, NC community, mentoring high school FTC and FRC teams. I. I NTRODUCTION The Duke Robotics Club is a student led project team from Duke University’s Pratt School of Engineering. The team is made up of members from math, science, and engineering. The team competed in RoboSub in 2006 and 2007. After a hiatus from the competition, during which the team devoted time to various other projects in col- laboration with Duke professors, the team returns to RoboSub for the third time since 2016. The mechanical subteam was responsible for the frame design, electronics enclosures, and ac- tuators. Cthulhu’s waterproof mechanical design is the result of extensive research, simulation, modeling, and in-house CNC machining, leading to a robust capsule that has not leaked in more than 50 of hours of testing. The electronics subteam was responsible for the power architecture, sensing systems, on- board computation hardware, and microproces- sor firmware. The largest success this year was simplifying Cthulhu’s capsule down to 2/3 of the previous size while also extending the capabilities and modularity to create a fully featured platform for informing and running the codebase. The software subteam wrote software to con- trol the robot, handling everything from sensor fusion to motion planning to computer vision. Additionally, the software team successfully tran- sitioned from an unmaintainable legacy codebase to a more maintainable Docker and ROS based system, adopting industry standards. II. COMPETITION AND DESIGN S TRATEGY Heading into the 2018-2019 year, Duke Robotics Club had strong momentum from the previous vanguard of graduates, but current mem- bership was young. The team’s former Leviathan was due for a replacement, so a strategic balance was adopted of building knowledge and expertise in newer members while tackling a new robot. The majority of robot design occurred in the fall semester. Learning from Leviathan, the team focused on reliability, robustness, and maneuver- ability over complexity and added functionality. As such, and because tasks had not yet been announced, the team placed an emphasis on mod- ularity, which allowed for expansion into more complex tasks later without stalling preliminary development. Not only does this modularity allow for use in future years, it also allows the bot to be a testing bed for new modules that will ultimately end up on new robots. A. Mechanical Subteam Strategy Physical design began with whiteboarding, moving then to computer-aided design (CAD) in SolidWorks, then 3D printing, and finishing with in-house machining, often with computer numerical control (CNC). Several key structures Duke Robotics Club | 1
Transcript
CTHULHU: The Design and Implementation of DukeRobotics Club’s 2019 AUVSI Competition Entry
Samuel Rabinowitz, Eric Chang, David Miron, Estelle He, Neil Dhar,Christopher Wolff, Trevor Fowler
Abstract— In 2019, the Duke Robotics Club returnsfor their third year in recent history to the AUVSIRoboSub Competition with a brand new, smaller, leaner,and more maneuverable robot: Cthulhu. Successor tothe team’s previous robot, Leviathan, Cthulhu is thebrainchild of the dozens of Duke engineers that makeup the student-run Duke Robotics Club. Work onCthulhu, split between three different subsystem teams(subteams), began in fall of 2018. The new robot featuresa more compact design (2/3 the size of Leviathan),a redesigned electronics stack, and modularity forgreater interaction with the environment. Additionally,the software team successfully transitioned from anunmaintainable legacy codebase to Docker and ROS,which are industry standards. The team is also an activemember of the Durham, NC community, mentoring highschool FTC and FRC teams.
I. INTRODUCTION
The Duke Robotics Club is a student led projectteam from Duke University’s Pratt School ofEngineering. The team is made up of membersfrom math, science, and engineering. The teamcompeted in RoboSub in 2006 and 2007. Aftera hiatus from the competition, during which theteam devoted time to various other projects in col-laboration with Duke professors, the team returnsto RoboSub for the third time since 2016.
The mechanical subteam was responsible forthe frame design, electronics enclosures, and ac-tuators. Cthulhu’s waterproof mechanical designis the result of extensive research, simulation,modeling, and in-house CNC machining, leadingto a robust capsule that has not leaked in morethan 50 of hours of testing.
The electronics subteam was responsible forthe power architecture, sensing systems, on-board computation hardware, and microproces-sor firmware. The largest success this year wassimplifying Cthulhu’s capsule down to 2/3 of the
previous size while also extending the capabilitiesand modularity to create a fully featured platformfor informing and running the codebase.
The software subteam wrote software to con-trol the robot, handling everything from sensorfusion to motion planning to computer vision.Additionally, the software team successfully tran-sitioned from an unmaintainable legacy codebaseto a more maintainable Docker and ROS basedsystem, adopting industry standards.
II. COMPETITION AND DESIGN STRATEGY
Heading into the 2018-2019 year, DukeRobotics Club had strong momentum from theprevious vanguard of graduates, but current mem-bership was young. The team’s former Leviathanwas due for a replacement, so a strategic balancewas adopted of building knowledge and expertisein newer members while tackling a new robot.
The majority of robot design occurred in thefall semester. Learning from Leviathan, the teamfocused on reliability, robustness, and maneuver-ability over complexity and added functionality.
As such, and because tasks had not yet beenannounced, the team placed an emphasis on mod-ularity, which allowed for expansion into morecomplex tasks later without stalling preliminarydevelopment. Not only does this modularity allowfor use in future years, it also allows the bot to bea testing bed for new modules that will ultimatelyend up on new robots.
A. Mechanical Subteam Strategy
Physical design began with whiteboarding,moving then to computer-aided design (CAD)in SolidWorks, then 3D printing, and finishingwith in-house machining, often with computernumerical control (CNC). Several key structures
Duke Robotics Club | 1
underwent rigorous finite element analysis (FEA)in SolidWorks. In some cases, such as ensur-ing adequate buoyancy and balance, a mix ofnumerical analyses and tests with the partially-assembled robot helped fine-tune the robot’s prop-erties. Front-loading this design work prior tomanufacturing minimized time-consuming andcostly mistakes.
Once the primary mechanical tasks were wellunderway, the team addressed other competitiontasks, focusing on the ones that bore the greatestsimilarity to those from prior years. Specifically,the marker dropper and torpedo tasks were nearlyidentical to previous competitions, so the teamdrew upon institutional knowledge to adapt andimprove existing solutions. Modularity allowedfor parallel component development: as competi-tion information was released, task-specific mod-ules were rapidly designed, prototyped, and testedin water without being fully integrated.
B. Electronics Subteam StrategyThe electronics subteam also focused on the
overall goals of reliability, robustness, and mod-ularity, and thus had the following major designconstraints:
• Improve on prior functionality while shrink-ing the electronics stack to less than 2/3 ofits previous size.
• Make an easily accessible, modifiable, andmodular stack. This was designed in responseto a lesson learned from Leviathan, whichopted for a minimally-structured stack forease of wiring, but proved challenging totroubleshoot and expand upon, causing majorconcerns for reliability.
• Reduce reliance on other subteams to test.To these ends, the process of creating the elec-tronics stack was completely reimagined. Ratherthan haphazardly wiring a variety of differentcomponents together, and only then attemptingto fit them in the stack, a strategy similar tothat of the mechanical team was adopted. Allproposed components went through a rigorousreview process, including ensuring their compati-bility with other components and hours of testingunder load. Lastly, the electronics subteam electedto use a Pixhawk controller to allow for testingindependent of other subteams.
C. Software Subteam StrategyThe software subteam went through a radical
shift this year to align with the new goals ofreliability and modularity. For the last few years,the codebase, controls algorithms, mathematicalmodels, and sensor fusion were developed in-house. This resulted in old, undocumented and un-maintainable code, so the subteam elected to makethe transition to using Docker and Robot Operat-ing System (ROS). ROS promotes increased mod-ularity, easy communication with the Pixhawk,and reliability given the extensive testing it hasgone through as an industry standard.
III. VEHICLE DESIGN: MECHANICAL SYSTEM
Fig. 1. A rendering of Cthulhu’s core frame and elements.
A. CapsuleOne of the mechanical subteam’s top priorities
was designing a capsule that was significantlysmaller and easier to open than that of Leviathan,as well as maintaining Leviathan’s precedent ofrobustness and waterproofing. Leviathan’s designused a double-O-ring static radial seal held inplace by two screws, and the capsule was at-tached to the robot while the electronics stack wasremovable for maintenance. Stack removal wasan arduous process: first unplug all connectors(contributing to mechanical wear and causingconfusion when replugging), next unscrew twoscrews, then tighten them into different holes tobreak the O-ring seal, and finally pry the stackout of the capsule.
Cthulhu completely reimagined Leviathan’s de-sign. Now, the stack was mounted on the robot,
Duke Robotics Club | 2
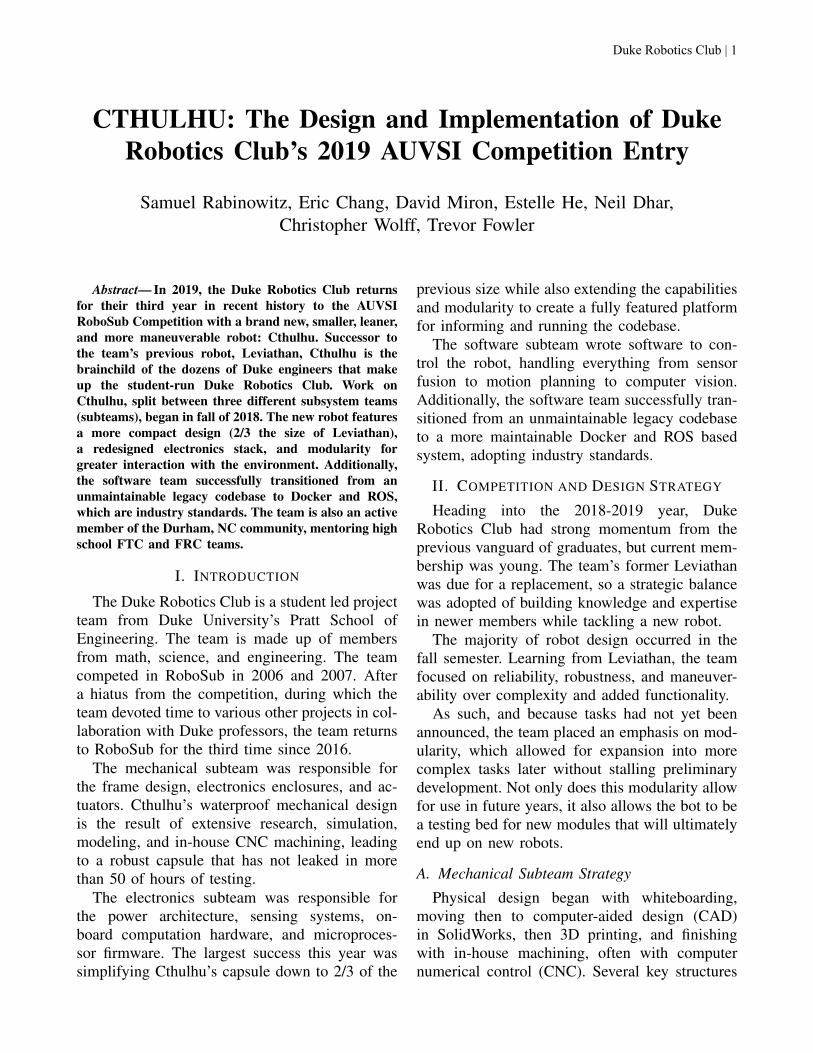
and the capsule was removed from around it.Removing the capsule was as easy as poppingtwo latches, removing two thumb screws, andsliding the capsule off. Connectors remainedplugged in. The stack could now be maintainedand tested while still on the robot. SolidWorksFEA informed structural changes to support thecantilevered stack. Polycarbonate was used forincreased strength with less material. The sameO-ring seal between flanged metal endcaps wascarried over from Leviathan for proven reliability.When needed, the stack can be removed for extramaintenance by removing only four screws.
Fig. 2. Cthulhu’s main capsule. Note the latch at left.
B. FrameCthulhu’s frame was redesigned from the
ground up to be simpler, lighter, and stronger thanthat of Leviathan. The key decision was to CNCmill and water-jet-cut two large aluminum sidingsand two connecting mounts in-house, rather thanscrewing together off-the-shelf aluminum bars.Extensive SolidWorks FEA minimized the amountof aluminum present while providing necessarystructural integrity. The resulting frame consists ofonly eight distinct parts and can be disassembledand reassembled in under 10 minutes.
Keeping in mind the design goal of modularity,additional space was added for new componentsin front of this year’s smaller new capsule, be-low the capsule around the DVL, and on thesides of the frame between the smaller thrusters.HDPE mounts protect sensitive components fromscratching, and the entire frame was anodized toprevent corrosion.
C. Electronics Stack (Mechanical Design)A major point of success was the mechanical
team’s partnership with the electronics team to
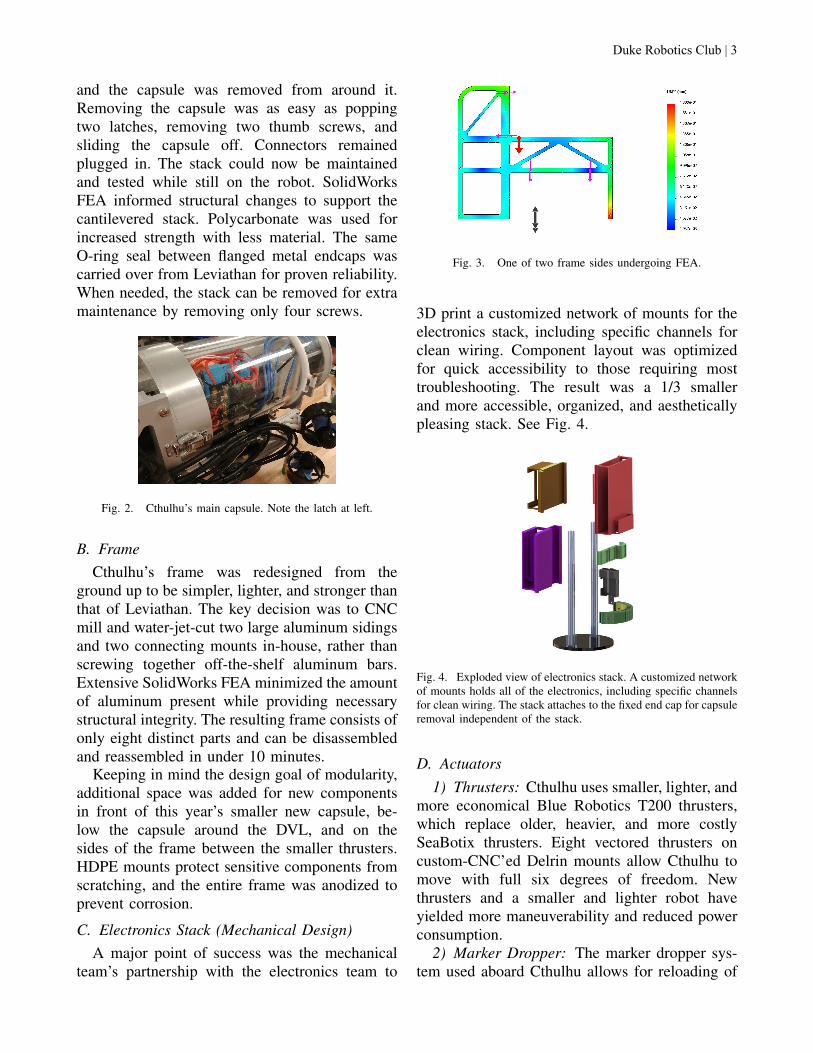
Fig. 3. One of two frame sides undergoing FEA.
3D print a customized network of mounts for theelectronics stack, including specific channels forclean wiring. Component layout was optimizedfor quick accessibility to those requiring mosttroubleshooting. The result was a 1/3 smallerand more accessible, organized, and aestheticallypleasing stack. See Fig. 4.
Fig. 4. Exploded view of electronics stack. A customized networkof mounts holds all of the electronics, including specific channelsfor clean wiring. The stack attaches to the fixed end cap for capsuleremoval independent of the stack.
D. Actuators1) Thrusters: Cthulhu uses smaller, lighter, and
more economical Blue Robotics T200 thrusters,which replace older, heavier, and more costlySeaBotix thrusters. Eight vectored thrusters oncustom-CNC’ed Delrin mounts allow Cthulhu tomove with full six degrees of freedom. Newthrusters and a smaller and lighter robot haveyielded more maneuverability and reduced powerconsumption.
2) Marker Dropper: The marker dropper sys-tem used aboard Cthulhu allows for reloading of
Duke Robotics Club | 3
collected golf balls mid-mission. Modified from apneumatic controlled to servo controlled design,the marker dropper works by sliding a box with acylindrical hole from the input tube to the output,allowing a single marker to drop at a time. Manybots, including Leviathan, use magnets to releasemetal markers; Cthulhu’s system can be actuatedby a single servo and is lighter and smaller thantwo magnetic systems.
Fig. 5. Exploded view of marker dropper.
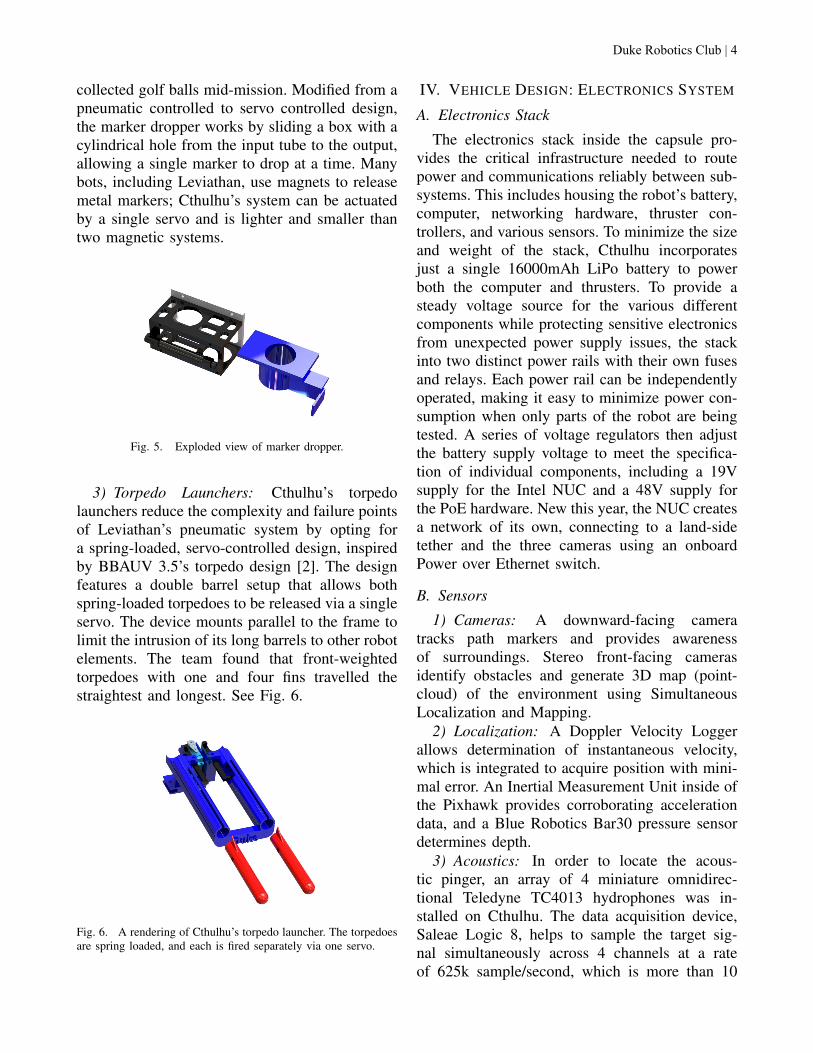
3) Torpedo Launchers: Cthulhu’s torpedolaunchers reduce the complexity and failure pointsof Leviathan’s pneumatic system by opting fora spring-loaded, servo-controlled design, inspiredby BBAUV 3.5’s torpedo design [2]. The designfeatures a double barrel setup that allows bothspring-loaded torpedoes to be released via a singleservo. The device mounts parallel to the frame tolimit the intrusion of its long barrels to other robotelements. The team found that front-weightedtorpedoes with one and four fins travelled thestraightest and longest. See Fig. 6.
Fig. 6. A rendering of Cthulhu’s torpedo launcher. The torpedoesare spring loaded, and each is fired separately via one servo.
IV. VEHICLE DESIGN: ELECTRONICS SYSTEM
A. Electronics Stack
The electronics stack inside the capsule pro-vides the critical infrastructure needed to routepower and communications reliably between sub-systems. This includes housing the robot’s battery,computer, networking hardware, thruster con-trollers, and various sensors. To minimize the sizeand weight of the stack, Cthulhu incorporatesjust a single 16000mAh LiPo battery to powerboth the computer and thrusters. To provide asteady voltage source for the various differentcomponents while protecting sensitive electronicsfrom unexpected power supply issues, the stackinto two distinct power rails with their own fusesand relays. Each power rail can be independentlyoperated, making it easy to minimize power con-sumption when only parts of the robot are beingtested. A series of voltage regulators then adjustthe battery supply voltage to meet the specifica-tion of individual components, including a 19Vsupply for the Intel NUC and a 48V supply forthe PoE hardware. New this year, the NUC createsa network of its own, connecting to a land-sidetether and the three cameras using an onboardPower over Ethernet switch.
B. Sensors
1) Cameras: A downward-facing cameratracks path markers and provides awarenessof surroundings. Stereo front-facing camerasidentify obstacles and generate 3D map (point-cloud) of the environment using SimultaneousLocalization and Mapping.
2) Localization: A Doppler Velocity Loggerallows determination of instantaneous velocity,which is integrated to acquire position with mini-mal error. An Inertial Measurement Unit inside ofthe Pixhawk provides corroborating accelerationdata, and a Blue Robotics Bar30 pressure sensordetermines depth.
3) Acoustics: In order to locate the acous-tic pinger, an array of 4 miniature omnidirec-tional Teledyne TC4013 hydrophones was in-stalled on Cthulhu. The data acquisition device,Saleae Logic 8, helps to sample the target sig-nal simultaneously across 4 channels at a rateof 625k sample/second, which is more than 10
Duke Robotics Club | 4
times of the maximum target frequency. Thishigh resolution in sampled signal improves theaccuracy in the phase comparison stage after thesignal being passed through a 5th order Chebyshevtype II digital band-pass filter. Moving averageand cross-correlation are used to determine thecritical window for phase comparison and obtainthe phase difference across 4 channels. With thephase difference data, Time Difference of Arrivalapproach is taken to locate several possible loca-tions of the pinger in 3D space, and the resultingmeasurements help to eliminate the options andpoint to a stable result.
C. Thrusters and ControlsFinally, to perform low level control and power
the thrusters, the stack also incorporates eightindividual ESCs and a Pixhawk flight controller.Having each thruster controlled by a separate,smaller ESC gives flexibility in placement andthermal design and also keeps the design modular,so that thruster failure will not propagate.
For reliability, the new thrusters were testedextensively to ascertain their optimal operatingvoltage and maximum current draw. Underwaterthruster connections were sealed not with thetraditional potting epoxy but with heat shrink afterthorough research revealed heat shrink’s use inNavy submarines and other undersea vessels forincreased reliability and handling. [6], [7]
V. VEHICLE DESIGN: SOFTWARE SYSTEM
A. Software InfrastructureThe new software infrastructure was designed
with testing, reproducibility and efficient develop-ment in mind. One major pain point in previousyears has been not only coordinating the develop-ment environment throughout the software teambut also ensuring that changes and updates arecommunicated and deployed regularly. In order toresolve these issues, two very significant changeswere made to the way in which the team’s soft-ware is written and deployed.
First, the software stack has been rebuilt fromthe ground up using ROS, allowing usage of arobust, well-documented set of libraries. Switch-ing over to ROS and following best practicesmeans avoiding the transfer of most legacy code.While a setback in the short term, it is the best
decision to build a stable software stack and fostercollaboration in the long term.
Second, Docker has been employed to entirelycontainerize the code needed to run Cthulhu.Coordination of development has been eased bythe portability of development environments thatDocker provides, not to mention the Dockerfile asa source of documentation for future years.
B. Robot LocalizationRobot localization uses the Extended Kalman
Filter that is a part of the ROS packagerobot localization. It is fed odometry dataacquired from the Pixhawk and DVL.
C. Computer VisionTo detect and localize the various objects on the
course, a convolutional neural network with resid-ual connections, similar to ResNet [9] but muchsmaller, is used. The model is a mapping from thepreprocessed camera image to a vector with indi-cator variables and bounding box coordinates foreach object. Training data currently comes fromthe training pool, with plans to use images fromthe competition site for the final model. Afterinitial training via adaptive momentum estimation[3], the model outputs are calibrated to representconfidence scores for each object.
Several techniques ensure stable training. Ahistogram of oriented gradients [1] that representthe image improves sample efficiency by drasti-cally lowering dimensionality. Data augmentationtechniques such as cropping, scaling, and additivenoise help counteract the lack of sample availabil-ity. For Cthulhu’s implementation, RectLabel [4]is used to create the dataset and PyTorch [5] totrain and run the model.
VI. EXPERIMENTAL RESULTS
A. Testing ProcessVigorous testing of the mechanical systems
was an integral part of development, and wasused throughout the construction process. Theinitial designs were guided by bounded Solid-Works simulations, placing theoretical bounds onthe frame thicknesses needed to maintain integrity.SolidWorks FEA was also executed on frameand thruster-mount parts. Mechanical componentswere then stress tested early and often, with the
Duke Robotics Club | 5
capsule having completed 24-hour trials at over 15feet underwater. Torpedo type and launcher sta-bility were also tested extensively. The electricalcomponents were also tested often, but full-systemtests were intentionally kept to a minimum be-cause of the disastrous damage a single leak couldcause the electronics. Partial software testing wasperformed often in the lab, while acquiring datafrom the DVL, testing motor control, or testingmotion planning in simulation. Full software testswere performed at the pool, identifying problemsspecific to water environments.
B. ResultsAt the time of this writing, Cthulhu is a bare-
bones vehicle capable of full freedom of motion atroughly 2 knots translational speed. The robot hasthree functional cameras for identifying obstaclesbelow and in front of it, three positioning sensorsincluding a DVL for navigation, and a singlepressure hull. The robot is capable of basic motionplanning and acoustic localization, but currentlyhas no fully functional external actuators for non-navigational tasks. A torpedo system is in place,but completion of that task is not implemented inthe software. By the time of the competition, itis hoped that the robot will have gained obstacleinterpretation through vision. It has enough bat-tery capacity to run for around 30 minutes withmedium duty-cycle thruster usage (30-50%).
C. Lessons LearnedWhile the team refined its process based on past
experience, there was no dearth of lessons to belearned from such a complex undertaking. Hereare some highlights:
• Prototype, integrate, and test, early andoften. For example, the team was thrown offby having to balance the robot in the water inthe first pool tests at the end of the semester.Early testing would have solved that.
• Communicate and delegate work. De-lays were frequently not engineering-related,but rather due to miscommunication. Realprogress was made when the team workedas a cohesive unit.
• Promote knowledge transfer. Having justa few people understand certain subsystemshas been a failure point in past years. While
strides were made to alleviate it, there isroom for improvement. Furthermore, engag-ing more members by empowering them tomake an impact benefits the team overall.
ACKNOWLEDGMENTS
Duke Robotics Club is housed within the PrattSchool of Engineering. The team gratefully ac-knowledges the Duke faculty and administrativestaff who have helped and continue to help makethe club a success. Special thanks to ProfessorsMichael Zavlanos and Kris Hauser, Pratt’s Under-graduate Program Coordinator Jennifer Ganley,and the Engineering Alumni Council, especiallythe club’s liaison, Mike Wesley. Lastly, the teamowes its continued success to its long-time spon-sors: The Lord Foundation, Duke Student Govern-ment Student Organization Funding Committee,General Motors, and SolidWorks.
REFERENCES
[1] Dalal, Navneet, and Bill Triggs. ”Histogramsof Oriented Gradients for Human Detection.”https://lear.inrialpes.fr/people/triggs/pubs/Dalal-cvpr05.pdf.
[2] E.W. Goh, et al, ”Design and Implemen-tation of BBAUV 3.5.” Robosub 2018.https://www.robonation.org/sites/default/files/NatlUSingaporeBumblebee TDR RS18.compressed.pdf.
[3] Kingma, Diederik P., and Jimmy L. Ba. ”ADAM:A METHOD FOR STOCHASTIC OPTIMIZATION.”https://arxiv.org/pdf/1412.6980.pdf.
[4] ”Labeling Images for Bounding Box Object Detectionand Segmentation.” RectLabel. Accessed July 09, 2019.https://rectlabel.com/.
[6] United States. Department of the Navy. Naval Sea SystemsCommand. MIL-STD-2003-5A. pp. 13, 50. September 3,2009. Accessed July 2, 2019. http://everyspec.com/MIL-STD/MIL-STD-2000-2999/MIL-STD-2003 5A 25950/.
[7] United States. Department of the Navy. Naval Sea SystemsCommand. Updates to MIL-STD-2003. By ChristopherNemarich. March 9, 2017. Accessed July 2, 2019.https://nsrp.org/wp-content/uploads/2017/03/04-Updates-to-MIL-STD-2003-NSRP-9-Mar-17-Final.pdf.
[8] ”LEVIATHAN: The Design and Implementationof Duke Robotics Clubs 2017 AUVSI Com-petition Entry.” 2017. Accessed July 2, 2019.https://robonation.org/sites/default/files/RS17 Duke Paper.pdf.
[9] Zhang, Ren, Sun, and Jian. ”Deep Residual Learning for Im-age Recognition.” ArXiv.org. December 10, 2015. AccessedJuly 09, 2019. https://arxiv.org/abs/1512.03385.
Duke Robotics Club | 6
Appendix A: Expectations
2019 RoboSub 13 May 2019
San Diego, California, USA Page 3 of 5
Appendix A: Expectations
Below is the scoring table showing the points associated with each task. Enter the points you expect to score with the vehicle(s) that you have designed and engineered. At the end of the competition, enter the points you actually scored in the last column.
Maximum Points
Expected
Points
Points
Scored
Utility of team website 50
Technical Merit (from journal paper) 150
Written Style (from journal paper) 50
Capability for Autonomous Behavior (static judging) 100
Creativity in System Design (static judging) 100
Team Uniform (static judging) 10
Team Video 50
Pre-Qualifying Video 100
Discretionary points (static judging) 40
Total 650
Maximum Points
Weight See Table 1 / Vehicle
Marker/Torpedo over weight or size by <10% minus 500 / marker
Stake through Heart: Open Oval, Cover Oval, Sm Heart 800, 1000, 1200 / torpedo (max 2)
Stake through Heart: Move lever 400
Stake through Heart: Bonus - Cover Oval, Sm Heart 500
Expose to Sunlight: Surface in Area 1000
Expose to Sunlight: Surface with object 400 / object
Expose to Sunlight: Open coffin 400
Expose to Sunlight: Drop Pickup 200 / object (Crucifix only)
Random Pinger first task 500
Random Pinger second task 1500
Inter-vehicle Communication 1000
Finish the mission with T minutes (whole + factional) Tx100
Subjective Measures
Performance Measures
451354585901045035490
84010015000400001003000000000000000
Duke Robotics Club | 7
Appendix B: Component Specifications
2019 RoboSub 13 May 2019
San Diego, California, USA Page 4 of 5
Appendix B: Component Specifications
In the past, a detailed list of components constituted the bulk of many paper submissions. This practice is discouraged as it distracts from the underlying strategic thinking, system engineering decisions, or novel contributions. For the record, teams should list the components actually used in the vehicle in the table below.
N/A
N/A 8021 Aluminum, customN/A Polycarbonate, customSubconn and Seacon wet-mate connectors
Blue Robotics T200 8 x $169Blue Robotics Basic ESC 8 x $25Blue Robotics Pixhawk PIXHAWK-R1-RP $120
T200-THRUSTER-R1-RP
Hitecincluded with T200 thrusters
D646WP waterproof servo 2 x $55
~$500$1100
Turnigy HC 4S 12C 16000mAh Lipo $108.80
Python
built into Pixhawk and DVLbuilt into PixhawkTeledyneCameras: Edmund Optics: Allied Vision Mako G-234CLenses: RMA Electronics: Tamron M112FM08
Extended Kalman Filter, SLAM w/ Stereo CamerasChebyshev filter, moving average, cross-correlation, Time Difference of Arrival
N/A
ML Pipeline: Single Convolutional Neural NetworkGate Detector: Segmentation, Thresholding, Hough Line Transform
N/A
Duke Robotics Club | 8
Appendix C: Community Outreach
Mentoring: The Duke Robotics Club recog-nizes the importance of working with the localcommunity and inspiring future generations ofSTEM students. The team has worked with bothlocal middle schoolers and high schoolers, helpingDurham Academy Middle School coach a pilotFIRST Lego League team and robotics after-school program and mentoring Team 900 Zebra-corns navigate the FIRST competition. The teamhas also advised countless teachers curriculumsthrough a partnership with Project Lead the Way.
In 2018-2019, members of the Duke RoboticsClub mentored a brand new team comprised oflocal Durham high school students, guiding themin creating a robot for the FIRST Tech Challenge,and also helping to bring them to the finals ofthe regional competition for the FIRST RoboticsCompetition. The members joined this FRC Team6426 Robo Gladiators multiple times per weekto help them strategize, build, and program theirrobot. Advancing to the finals of the regionalcompetition as a rookie team, they outperformedmany veteran teams. Looking forward to nextseason, the Robo Gladiators hope to extend theirsuccesses and become national champions, andthe Duke Robotics Club looks forward to onceagain helping them succeed.
Even though each members time could havebeen spent improving Cthulhu, the team acknowl-edges how much more robotics can advance witheach class of students. The Duke Robotics Clubwants to encourage as much innovation as pos-sible, and the team is proud to be able to sparkideas in generations of students to come.
Fig. 7. The local high schoolers’ FIRST Robotics Competitionteam, mentored by two Duke Robotics Club freshmen, afterreaching the regional finals in their pilot year.
Within Duke: The Duke Robotics Club has alsospread robotics and STEM through outreach bothwithin Duke’s Pratt School of Engineering and theuniversity as a whole. The team has run a Bot Bat-tle competition to allow students of all disciplinesto give robotics a try. The team hosts informa-tion sessions every semester, open to the entireuniversity, attracting over 100 students each time.Lastly, the team has reached out to interest- andidentity-based student groups on campus withinSTEM fields to coordinate cross-promotion andfacilitate activities between members of relatedclubs.