D. Kinematics: Relative and Constrained Motion Background By definition, the vector ~ r B/A is the vector which points FROM point A TO point B. From the vector diagram to the right, we see that ~ r B/A is related to the position vectors of points A and B as: ~ r B/A = ~ r B - ~ r A From this we see that ~ r B/A is the position of point B relative to the position of point A. Di↵eren- tiation of this vector will produce the relative velocity and relative acceleration vectors of B with respect to A. A O B ! r A ! r B /A ! r B Objectives The goals of this lecture are to: • develop and use the relative motion kinematic equations relating the velocity and acceleration of two points • study the relative kinematics of two points whose motion are constrained by connections of taut inextensible cables - - - - = # #
Transcript
D. Kinematics: Relative and Constrained Motion
Background
By definition, the vector ~rB/A is the vector which points FROM point A TO point B. From thevector diagram to the right, we see that ~rB/A is related to the position vectors of points A and Bas:
~rB/A = ~rB � ~rA
From this we see that ~rB/A is the position of point B relative to the position of point A. Di↵eren-tiation of this vector will produce the relative velocity and relative acceleration vectors of B withrespect to A.
Relative and Constrained Motion I-23 ME274
I.2 - Kinematics: Relative and Constrained Motion
Background: By defintion, the vector
rB /A is the vector which points FROM point A TO point B. From the vector diagram to the right, we see that
rB /A is related to the position vectors of points A and B as:
rB = rA + rB /A
or alternately,
rB /A = rB ! rA
From this we see that
rB /A is the” position of point B relative to the position of point A”. Objectives: The goals of this lecture are to:
• develop and use the relative motion kinematic equations relating the velocity and acceleration of two points
• study the relative motion kinematics of two points whose motion are constrained by connections of taut “inextensible” cables
A
O
B
!rA
!rB/A
!rB
Objectives
The goals of this lecture are to:
• develop and use the relative motion kinematic equations relating the velocity and accelerationof two points
• study the relative kinematics of two points whose motion are constrained by connections oftaut inextensible cables
- --
-
=
#
#
Chapter1
Lecture Material
Relative Motion
As discussed above, the vector:
~rB/A = ~rB � ~rA
represents the position of point B relative to the position of point A.
If we take time derivatives of the above equation, we arrive at:
d
dt~rB/A =
d
dt~rB � d
dt~rA ) ~vB/A = ~vB � ~vA
and
d2
dt2~rB/A =
d2
dt2~rB � d2
dt2~rA ) ~aB/A = ~aB � ~aA
where ~vB/A and ~aB/A are interpreted as the velocity of B with respect to A and the acceleration of
B with respect to A, respectively.
or relative to
--
-
Chapter1
Example 1.D.1
Given: At the instant shown, car B is traveling with a speed of 50 km/hr and is slowing down ata rate of 10 km/hr2. Car A is moving with a speed of 80 km/hr, a speed that is increasing at arate of 10 km/hr2. At this instant, A and B are traveling in the same direction.
Find: What acceleration does a passenger in car A observe for car B?Relative and Constrained Motion I-26 ME274
Example I.2.1 At the instant shown, car B is traveling with a speed of 80 ft/sec and is slowing down at a rate of 10 ft / sec2 . Car A is moving with a speed of 60 ft/sec, a speed that is increasing at a rate of 5 ft / sec2 . At this instant, A and B are traveling in the same direction. What acceleration does a passenger in car A observe for car B?
y
A B
500 meters
x
vB vA
path is a circle off -- foo m
-
a-
ABIA- i → -g
a BIA= AB - AA
path geometry is known for B n
fi ←
→ n
→ Use path coordinates for Ig - enz
' te.V nIb - i# + pen
if to km/hr'
, VE 50 km/hr, fer foo m
II. =- in, i , ii. = + to tmlhr
→ Convert Jig into Cartesian Coordinates?
at this instant : I.+= - j ,En -- - in
⇒ at.-
- tipi - i. in
⇒'
aime dis - ai. -- - in + cia - ii. in
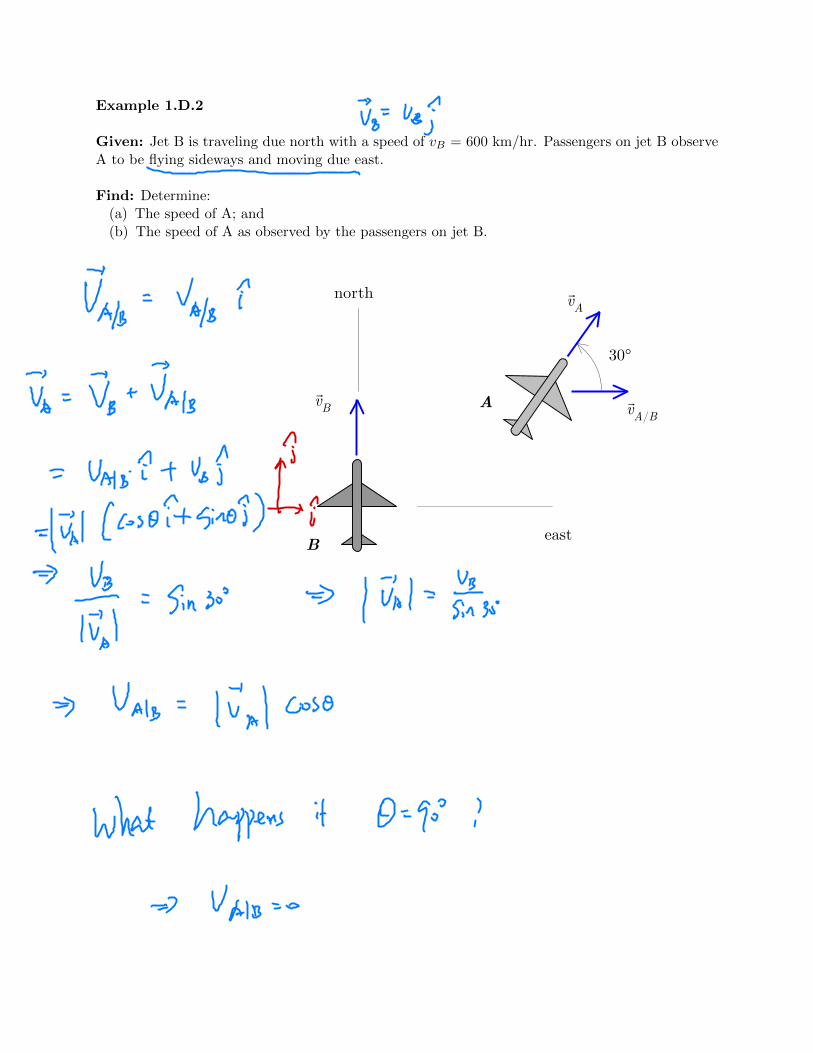
Example 1.D.2
Given: Jet B is traveling due north with a speed of vB = 600 km/hr. Passengers on jet B observeA to be flying sideways and moving due east.
Find: Determine:(a) The speed of A; and(b) The speed of A as observed by the passengers on jet B.
Relative and Constrained Motion I-27 ME274
Example I.2.2 Jet B is traveling due north with a speed of vB = 600 km / hr . Passengers on jet B observe A to be flying sideways and moving due east. Determine the speed of A and the speed of A as observed by the passengers on jet B.
east B
A
north
!vB
!vA
!vA/B
30°
8,5 Vij-
Jay, = VALBYJI -- J, + JAI,
a
= VAIB- it Ust f'
tail (Gsitsinoi )-in
⇒ Viz
¥,= Sins: ⇒ Iiit -- Y÷.
⇒ Val, = ftp.looso
what happens it 0=93 ?
⇒ VAIB -- o
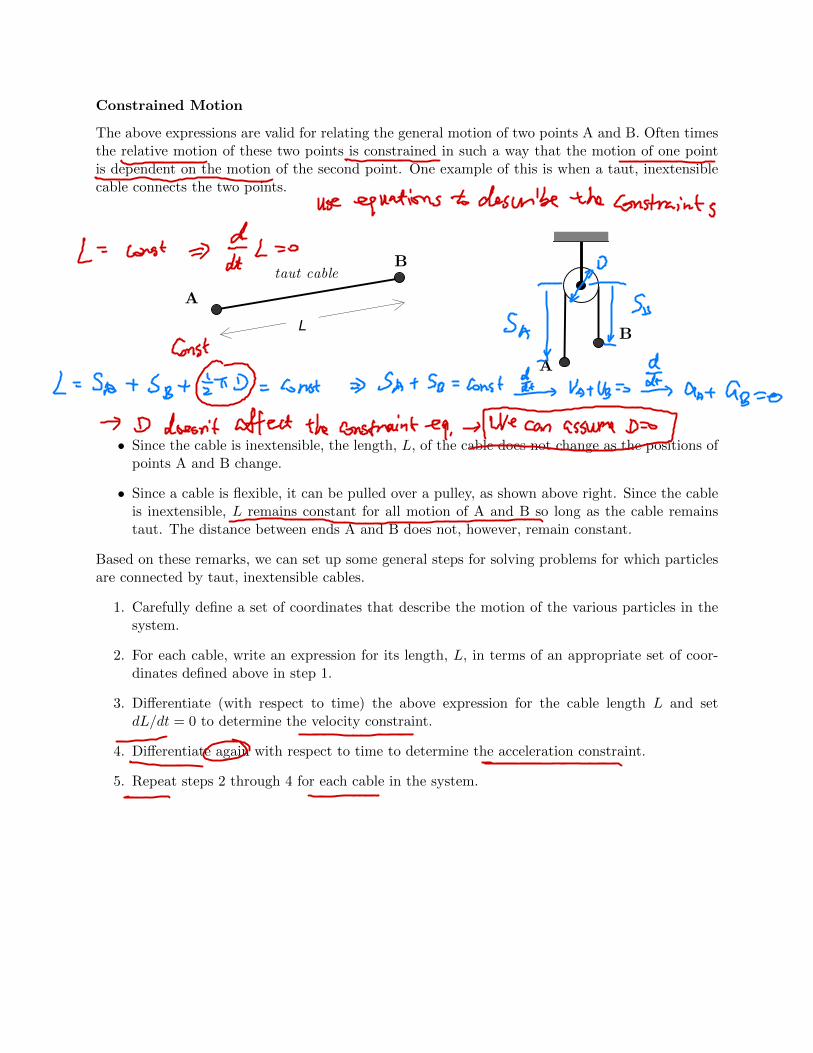
Constrained Motion
The above expressions are valid for relating the general motion of two points A and B. Often timesthe relative motion of these two points is constrained in such a way that the motion of one pointis dependent on the motion of the second point. One example of this is when a taut, inextensiblecable connects the two points.
Relative and Constrained Motion I-25 ME274
Constrained motion The above expressions are valid for relating the general motion of two points A and B. Often times the relative motion of these two points is constrained in such a way that the motion of one point is dependent on the motion of the second point. One example of this is when a taut, inextensible cable connects the two points.
• Since the cable is inextensible, the length, L, of the cable does not change as the positions of points A and B change.
• Since a cable is flexible, it can be pulled over a pulley, as shown above right. Since the cable is inextensible, L remains constant for all motion of A and B so long as the cable remains taut. The distance between ends A and B does not, however, remain constant.
Based on these remarks, we can set up some general steps for solving problems for which particles are connected by taut, inextensible cables.
1) Carefully define a set of coordinates that describe the motion of the various particles in the system.
2) For each cable, write an expression for its length, L, in terms of an appropriate set of coordinates defined above in 1).
3) Differentiate (with respect to time) the above expression for the cable length L and set dL/dt = 0 to determine the velocity constraint.
4) Differentiate again with respect to time to determine the acceleration constraint.
5) Repeat steps 2) – 4) for each cable in the system. This process is demonstrated by examples that follow.
A taut cable
B
L B
A
• Since the cable is inextensible, the length, L, of the cable does not change as the positions ofpoints A and B change.
• Since a cable is flexible, it can be pulled over a pulley, as shown above right. Since the cableis inextensible, L remains constant for all motion of A and B so long as the cable remainstaut. The distance between ends A and B does not, however, remain constant.
Based on these remarks, we can set up some general steps for solving problems for which particlesare connected by taut, inextensible cables.
1. Carefully define a set of coordinates that describe the motion of the various particles in thesystem.
2. For each cable, write an expression for its length, L, in terms of an appropriate set of coor-dinates defined above in step 1.
3. Di↵erentiate (with respect to time) the above expression for the cable length L and setdL/dt = 0 to determine the velocity constraint.
4. Di↵erentiate again with respect to time to determine the acceleration constraint.
5. Repeat steps 2 through 4 for each cable in the system.
- - -
-
use equations to describe the constraints
[ = const ⇒ ¥ L⇒,D
const Saf Sis
L -- Sp t sBtD= const ⇒ Sat so = const¥ Vat ↳=¥ aat a,z=o→ D doesn't affect the constraint eaq-fwecanassu.me#y
-
--
-o-
--
Example 1.D.6
Given: Blocks B and C are connected by a single inextensible cable, with this cable being wrappedaround pulleys at D and E. In addition, the cable is wrapped around a pulley attached to blockA as shown. Assume the radii of the pulleys to be small. Blocks B and C move downward withspeeds of vB = 6 ft/s and vC = 18 ft/s, respectively.
Find: Determine the velocity of block A when sA = 4 ft.
Relative and Constrained Motion I-31 ME274
Example I.2.5 Blocks B and C are connected by a single inextensible cable, with this cable being wrapped around pulleys at D and E. In addition, the cable is wrapped around a pulley attached to block A as shown. Assume the radii of the pulleys to be small. Blocks B and C move downward with speeds of vB = 6 ft / sec and vC = 18 ft / sec , respectively. Determine the velocity of block A when sA = 4 ft .