1
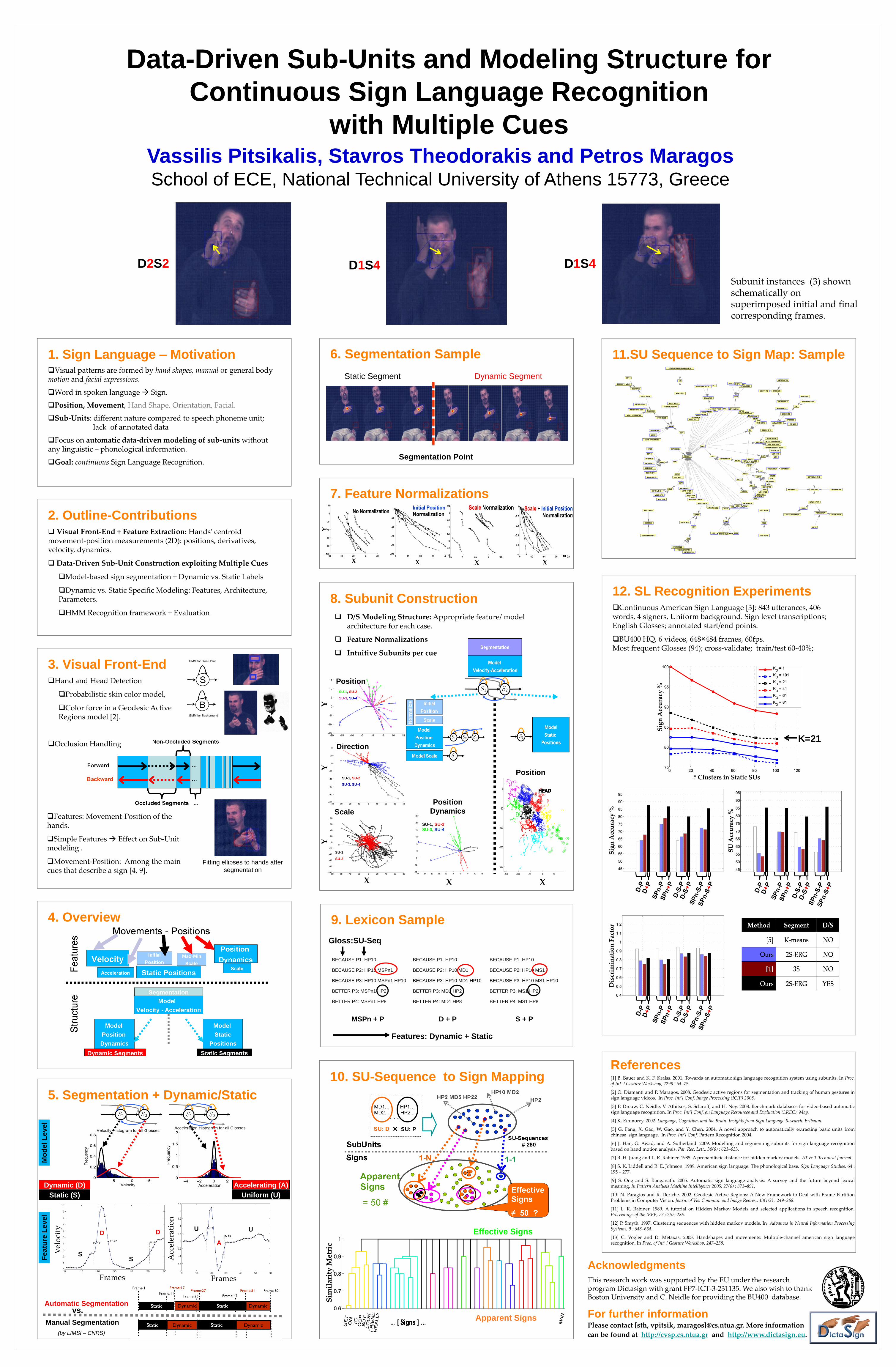
Vassilis Pitsikalis, Stavros Theodorakis and Petros Maragos School of ECE, National Technical University of Athens 15773, Greece Data-Driven Sub-Units and Modeling Structure for Continuous Sign Language Recognition with Multiple Cues 2. Outline-Contributions Visual Front-End + Feature Extraction: Hands’ centroid movement-position measurements (2D): positions, derivatives, velocity, dynamics. Data-Driven Sub-Unit Construction exploiting Multiple Cues Model-based sign segmentation + Dynamic vs. Static Labels Dynamic vs. Static Specific Modeling: Features, Architecture, Parameters. HMM Recognition framework + Evaluation 1. Sign Language – Motivation Visual patterns are formed by hand shapes, manual or general body motion and facial expressions. Word in spoken language Sign. Position, Movement, Hand Shape, Orientation, Facial. Sub-Units: different nature compared to speech phoneme unit; lack of annotated data Focus on automatic data-driven modeling of sub-units without any linguistic – phonological information. Goal: continuous Sign Language Recognition. 3. Visual Front-End Hand and Head Detection Probabilistic skin color model, Color force in a Geodesic Active Regions model [2]. Occlusion Handling Features: Movement-Position of the hands. Simple Features Effect on Sub-Unit modeling . Movement-Position: Among the main cues that describe a sign [4, 9]. Fitting ellipses to hands after segmentation 4. Overview 7. Feature Normalizations X X X Y X 8. Subunit Construction D/S Modeling Structure: Appropriate feature/ model architecture for each case. Feature Normalizations Intuitive Subunits per cue SU-1, SU-2 SU-3, SU-4 Y Direction SU-1 SU-2 Y X Scale Y X coordinate Position SU-1, SU-2 SU-3, SU-4 10. SU-Sequence to Sign Mapping Apparent Signs Similarity Metric Effective Signs References [1] B. Bauer and K. F. Kraiss. 2001. Towards an automatic sign language recognition system using subunits. In Proc. of Int’ l Gesture Workshop, 2298 : 64–75. [2] O. Diamanti and P. Maragos. 2008. Geodesic active regions for segmentation and tracking of human gestures in sign language videos. In Proc. Int’l Conf. Image Processing (ICIP) 2008. [3] P. Dreuw, C. Neidle, V. Athitsos, S. Sclaroff, and H. Ney. 2008. Benchmark databases for video-based automatic sign language recognition. In Proc. Int’l Conf. on Language Resources and Evaluation (LREC), May. [4] K. Emmorey. 2002. Language, Cognition, and the Brain: Insights from Sign Language Research. Erlbaum. [5] G. Fang, X. Gao, W. Gao, and Y. Chen. 2004. A novel approach to automatically extracting basic units from chinese sign language. In Proc. Int’l Conf. Pattern Recognition 2004. [6] J. Han, G. Awad, and A. Sutherland. 2009. Modelling and segmenting subunits for sign language recognition based on hand motion analysis. Pat. Rec. Lett., 30(6) : 623–633. [7] B. H. Juang and L. R. Rabiner. 1985. A probabilistic distance for hidden markov models. AT & T Technical Journal. [8] S. K. Liddell and R. E. Johnson. 1989. American sign language: The phonological base. Sign Language Studies, 64 : 195 – 277. [9] S. Ong and S. Ranganath. 2005. Automatic sign language analysis: A survey and the future beyond lexical meaning. In Pattern Analysis Machine Intelligence 2005, 27(6) : 873–891. [10] N. Paragios and R. Deriche. 2002. Geodesic Active Regions: A New Framework to Deal with Frame Partition Problems in Computer Vision. Journ. of Vis. Commun. and Image Repres., 13(1/2) : 249–268. [11] L. R. Rabiner. 1989. A tutorial on Hidden Markov Models and selected applications in speech recognition. Proceedings of the IEEE, 77 : 257–286. [12] P. Smyth. 1997. Clustering sequences with hidden markov models. In Advances in Neural Information Processing Systems, 9 : 648–654. [13] C. Vogler and D. Metaxas. 2003. Handshapes and movements: Multiple-channel american sign language recognition. In Proc. of Int’ l Gesture Workshop, 247–258. 12. SL Recognition Experiments Continuous American Sign Language [3]: 843 utterances, 406 words, 4 signers, Uniform background. Sign level transcriptions; English Glosses; annotated start/end points. BU400 HQ, 6 videos, 648×484 frames, 60fps. Most frequent Glosses (94); cross-validate; train/test 60-40%; For further information Please contact [sth, vpitsik, maragos]@cs.ntua.gr. More information can be found at http://cvsp.cs.ntua.gr and http://www.dictasign.eu . Acknowledgments This research work was supported by the EU under the research program Dictasign with grant FP7-ICT-3-231135. We also wish to thank Boston University and C. Neidle for providing the BU400 database. 5 6 Static Segment Dynamic Segment Segmentation Point 6. Segmentation Sample 11.SU Sequence to Sign Map: Sample SU-1, SU-2 SU-3, SU-4 X Position Dynamics Zoom # Clusters in Static SUs Sign Accuracy % K=21 Position Sign Accuracy % SU Accuracy % Discrimination Factor D2S2 Subunit instances (3) shown schematically on superimposed initial and final corresponding frames. D1S4 D1S4 X 9. Lexicon Sample BECAUSE P1: HP10 BECAUSE P2: HP10 MD1 BECAUSE P3: HP10 MD1 HP10 BETTER P3: MD1 HP2 BETTER P4: MD1 HP8 BECAUSE P1: HP10 BECAUSE P2: HP10 MS1 BECAUSE P3: HP10 MS1 HP10 BETTER P3: MS1 HP2 BETTER P4: MS1 HP8 BECAUSE P1: HP10 BECAUSE P2: HP10 MSPn1 BECAUSE P3: HP10 MSPn1 HP10 BETTER P3: MSPn1 HP2 BETTER P4: MSPn1 HP8 Gloss:SU-Seq Features: Dynamic + Static MSPn + P D + P S + P 5. Segmentation + Dynamic/Static Automatic Segmentation Manual Segmentation (by LIMSI – CNRS) Feature Level Dynamic (D) Static (S) Accelerating (A) Uniform (U) Acceleration Frames Frames S S D D A U U Model Level vs. Velocity