David Luebke 11-17- 98 Modeling and Rendering Modeling and Rendering Architecture from Architecture from Photographs Photographs A hybrid geometry- and image-based A hybrid geometry- and image-based approach approach Debevec, Taylor, and Debevec, Taylor, and Malik Malik SIGGRAPH 96 SIGGRAPH 96 Presented by David Luebke Presented by David Luebke
Transcript
David Luebke 11-17-98
Modeling and Rendering Modeling and Rendering Architecture from PhotographsArchitecture from Photographs
A hybrid geometry- and image-based approachA hybrid geometry- and image-based approach
Debevec, Taylor, and MalikDebevec, Taylor, and Malik
SIGGRAPH 96SIGGRAPH 96Presented by David LuebkePresented by David Luebke
David Luebke 11-17-98
OverviewOverview
The Problem and the IdeaThe Problem and the Idea BackgroundBackground Model Representation and Model Representation and
ReconstructionReconstruction View-dependent Texture MappingView-dependent Texture Mapping Model-based StereoModel-based Stereo Conclusion and DiscussionConclusion and Discussion
David Luebke 11-17-98
The ProblemThe Problem
Architectural walkthroughs and flybys Architectural walkthroughs and flybys are an important applicationare an important application
Creating detailed models is Creating detailed models is hardhard– Start with blueprints (if they exist…)Start with blueprints (if they exist…)– Survey an existing buildingSurvey an existing building
Resulting systems don’t look greatResulting systems don’t look great– Hard to get all the detailsHard to get all the details– Hard to get realistic Hard to get realistic exteriorsexteriors
David Luebke 11-17-98
The IdeaThe Idea
Wanted: a system to generate realistic Wanted: a system to generate realistic architectural scenesarchitectural scenes
Idea: Model and render from Idea: Model and render from photos!photos!– Take a few widely spaced photographsTake a few widely spaced photographs– Build simple underlying model of sceneBuild simple underlying model of scene– Use correspondences between photos to Use correspondences between photos to
adjust scene parametersadjust scene parameters– Paste photos back onto simple geometry Paste photos back onto simple geometry
of scene for realistic façadeof scene for realistic façade
David Luebke 11-17-98
BackgroundBackground
Computer vision: Computer vision: recover 3D geometry recover 3D geometry from 2D imagesfrom 2D images
Debevec uses some CV concepts:Debevec uses some CV concepts:– Camera calibrationCamera calibration: simplify problem by : simplify problem by
finding exact pixel finding exact pixel ray mappings ray mappings– Structure from motionStructure from motion and and stereo stereo
correspondencecorrespondence: triangulating for depth: triangulating for depth– Image-based renderingImage-based rendering: given image & : given image &
depth map, re-render from other viewsdepth map, re-render from other views
David Luebke 11-17-98
Photogrammetric ModelingPhotogrammetric Modeling
Extracting 3D surfaces from multiple Extracting 3D surfaces from multiple images is images is hardhard
Constrain the problem:Constrain the problem:– User builds a simple notional model using User builds a simple notional model using
– User marks correspondences between User marks correspondences between images and modelimages and model
– System fits model to imagesSystem fits model to images
David Luebke 11-17-98
Photogrammetric ModelingPhotogrammetric Modeling
Now system need only solve Now system need only solve parameters of blocks!parameters of blocks!– Height, width, translation, rotation, etc.Height, width, translation, rotation, etc.
David Luebke 11-17-98
Photogrammetric ModelingPhotogrammetric Modeling
Even better: build in architectural Even better: build in architectural constraints!constraints!– Roof prism lies flush on building blockRoof prism lies flush on building block– Stacked tower blocks share center axisStacked tower blocks share center axis
Given the model, treat each camera Given the model, treat each camera position as a “slide projector”position as a “slide projector”
Some images overlap!Some images overlap!– Idea: pick image taken from viewpoint Idea: pick image taken from viewpoint
closest to desired rendering viewpointclosest to desired rendering viewpoint– Better: use weighted average (Fig 12)Better: use weighted average (Fig 12)
Problem: fine architectural details Problem: fine architectural details still not capturedstill not captured– recessed windows, friezes, cornicesrecessed windows, friezes, cornices
Stereo depth extraction can help!Stereo depth extraction can help!– Problem: when images are taken from Problem: when images are taken from
distant viewpoints, corresponding pixel distant viewpoints, corresponding pixel neighborhoods can look very differentneighborhoods can look very different
David Luebke 11-17-98
Model-Based StereoModel-Based Stereo
Key observation: Key observation: – Even though two images of the same Even though two images of the same
scene may look very different, they look scene may look very different, they look similar after being projected onto the similar after being projected onto the approximate modelapproximate model..
– Idea: Warp offset image by projecting onto Idea: Warp offset image by projecting onto the approximate model and re-renderingthe approximate model and re-rendering
– Use McMillian warp to render image-with-Use McMillian warp to render image-with-depth from novel viewpointsdepth from novel viewpoints
David Luebke 11-17-98
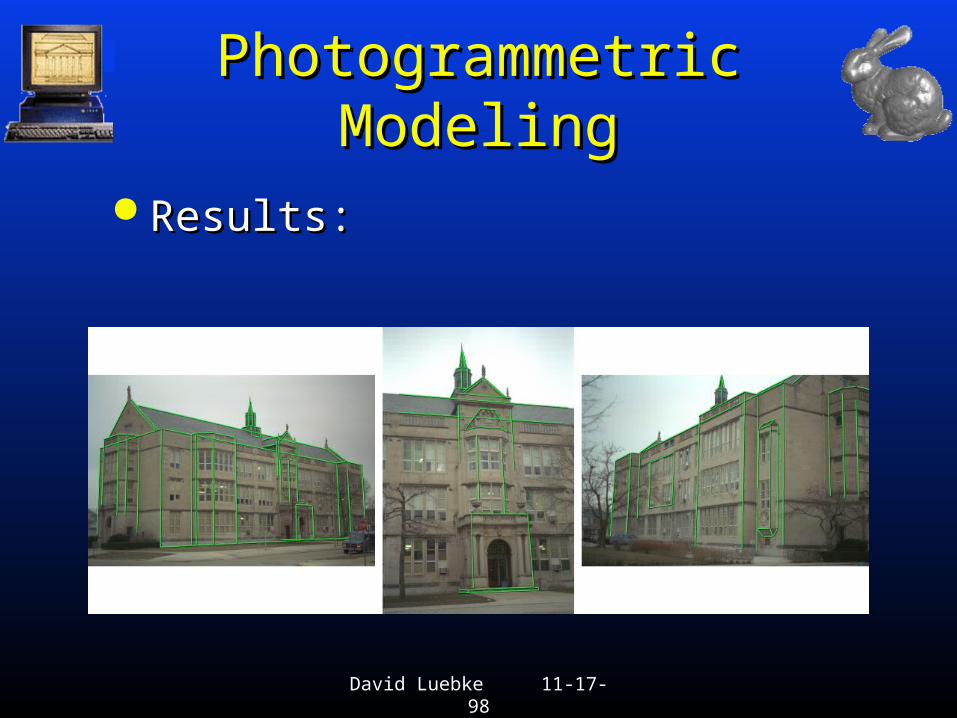
Conclusion and DiscussionConclusion and Discussion
Results speak for themselvesResults speak for themselves What problems do you see? What problems do you see?





















![Fusion of Differently Exposed Imagesronrubin/Projects/fusion/report/...oughly discussed by Debevec and Malik [10], as well as by Mann and Picard [9]. Both develop methods for reconstructing](https://static.documents.pub/doc/80x56/5fd7715429556166c86c7a47/fusion-of-diierently-exposed-ronrubinprojectsfusionreport-oughly-discussed.jpg)














