DECLARATION OF THESIS / UNDERGRADUATE PROJECT REPORT AND COPYRIGHT Author’s full name : Mohammed Ameen Abbas AL-Zuraiqi Date of Birth : 01/01/1989 Title : Modeling and controller design of an industrial pneumatic actuator system Academic Session : 2013/2014 I declare that this thesis is classified as: CONFIDENTIAL (Contains confidential information under the Official Secret Act 1972)* RESTRICTED (Contains restricted information as specified by the organization where research was done)* OPEN ACCESS I agree that my thesis to be published as online open access (full text) I acknowledged that Universiti Teknologi Malaysia reserves the right as follows: 1. The thesis is the property of Universiti Teknologi Malaysia 2. The Library of Universiti Teknologi Malaysia has the right to make copies for the purpose of research only. 3. The Library has the right to make copies of the thesis for academic exchange. Certified by: SIGNATURE SIGNATURE OF SUPERVISOR (NEW IC NO/PASSPORT) NAME OF SUPERVISOR Date: JULY 2014 Date: JULY 2014 PSZ 19:16 (Pind. 1/07) NOTES: * If the thesis is CONFIDENTAL or RESTRICTED, please attach with the letter from the organization with period and reasons for confidentiality or restriction. UNIVERSITI TEKNOLOGI MALAYSIA ﻣﺘﻠﺐ ﺳﺎﯾﺖMatlabSite.com MatlabSite.com ﻣﺘﻠﺐ ﺳﺎﯾﺖ
Transcript
DECLARATION OF THESIS / UNDERGRADUATE PROJECT REPORT AND COPYRIGHT
Author’s full name : Mohammed Ameen Abbas AL-Zuraiqi
Date of Birth : 01/01/1989
Title : Modeling and controller design of an industrial pneumatic actuator
system
Academic Session : 2013/2014
I declare that this thesis is classified as:
CONFIDENTIAL (Contains confidential information under the Official Secret Act
1972)*
RESTRICTED (Contains restricted information as specified by the
organization where research was done)*
OPEN ACCESS I agree that my thesis to be published as online open access
(full text)
I acknowledged that Universiti Teknologi Malaysia reserves the right as follows:
1. The thesis is the property of Universiti Teknologi Malaysia
2. The Library of Universiti Teknologi Malaysia has the right to make copies for the
purpose of research only.
3. The Library has the right to make copies of the thesis for academic exchange.
Certified by:
SIGNATURE SIGNATURE OF SUPERVISOR
(NEW IC NO/PASSPORT) NAME OF SUPERVISOR
Date: JULY 2014 Date: JULY 2014
PSZ 19:16 (Pind. 1/07)
NOTES: * If the thesis is CONFIDENTAL or RESTRICTED, please attach with the letter from
the organization with period and reasons for confidentiality or restriction.
UNIVERSITI TEKNOLOGI MALAYSIA
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
ii
I declare that I have read this thesis and in my opinion this thesis is sufficient
in terms of scope and quality for the award of the degree of “Bachelor of
Engineering (Electrical - Control and Instrumentation)"
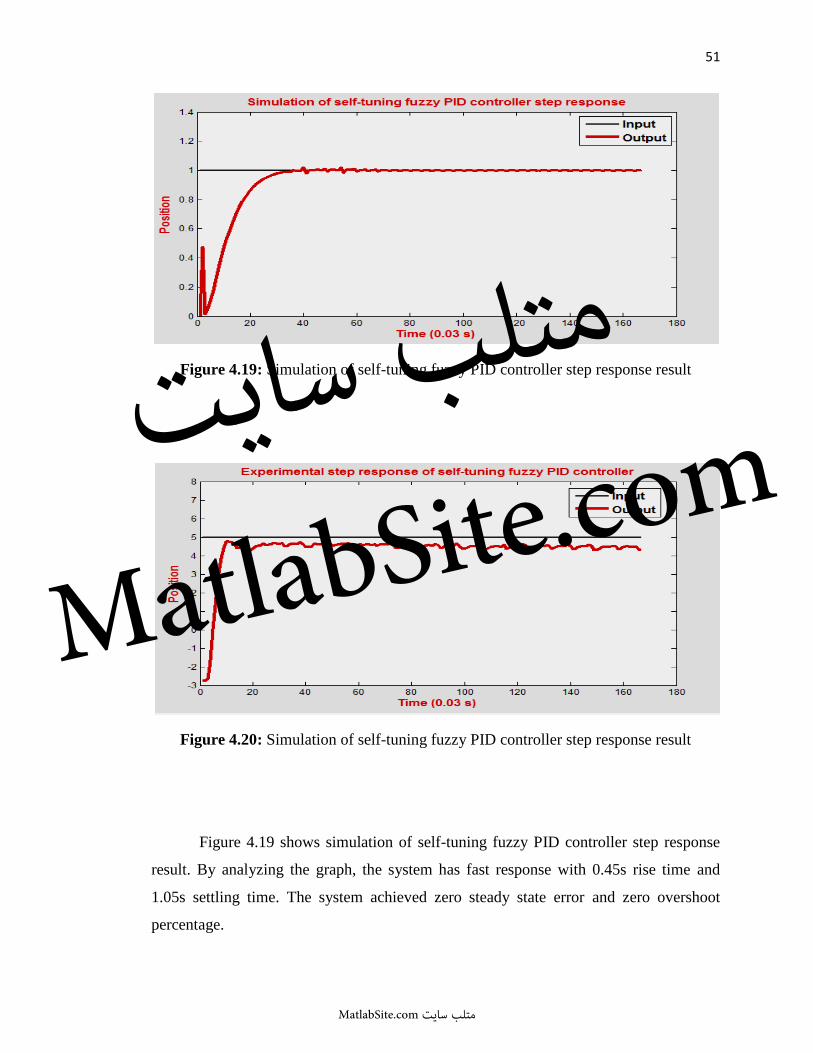
result. By analyzing the graph, the system has fast response with 0.45s rise time and
1.05s settling time. The system achieved zero steady state error and zero overshoot
percentage.
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
52
Figure 4.20 shows experimental step response result of self tuning fuzzy PID
controller. From the graph obtained, it’s clear that the system has fast response with 0.1s
rise time and 0.36s settling time. The system exhibits some steady state error of 6.25%
and it has a very small overshoot percentage of 2.22%.
Table 4.5: Simulation and experimental results of the controllers’ performance
specifications
Controller Rise
time Tr
Settling
time Ts
Overshoot
%OS
Steady
state
error %
Simulation PID 0.39s 1.29s 4.5% 0%
Fuzzy-PID 0.45s 1.05s 0% 0%
Experimental PID 0.12s 0.70s 27.27% 5%
Fuzzy-PID 0.10s 0.36s 2.22% 6.25%
From Table 4.4, it can be concluded that the system response of the pneumatic
system was improved significantly when applying conversional PID and self-tuning
Fuzzy-PID controllers. Self-tuning fuzzy-PID controller outperformed the conversional
PID controller with 2.22% overshoot only and faster response.
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
53
CHAPTER 5
CONCLUSION AND RECOMMENDATIONS
5.1 Conclusion
A pneumatic actuator is a mechanical device which converts the compressed air
energy into mechanical motion. The motion can be rotary or linear, depending on the
type of actuator. Many industries nowadays use pneumatic actuators in positioning,
clamping, gripping, drilling, and conveying operations in the process of manufacturing
and automation. This is due to the advantages pneumatic actuators offer over other types
of force actuators such as electromechanical and hydraulic actuators.
Although pneumatic actuators have many good attributes, achieving precise and
high-speed control of their systems is a challenge. This difficulty is due to the high-
order, time-variant actuator dynamics, and system nonlinearities like air compressibility,
static and coulomb friction, and pressure supply variations. This project presents the
process of modeling a pneumatic actuator system followed by designing controllers to
improve the system performance.
In this project, the pneumatic actuator system was modeled using system
identification toolbox. Input and output data were collected from the experimental
pneumatic actuator. The multi sine and single sine inputs where used with different
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
54
sampling times. Two model structures were selected which are Auto Regressive
Exogenous (ARX) and Auto Regressive Moving Average Exogenous (ARMAX). Model
estimation and validation were done by analyzing residual correlation and best fit
percentage.
From the analysis of the modeling results, multi sine models were unstable
because they have one of their poles outside the unit cycle. Besides, the percentage fit is
very low and not adequate for controller design purposes. For single sine models, very
good percentage fit was achieved when the sampling time is 0.01s; however, these
models fail to be adequate for controller design due to the very high gain in the
numerator of the transfer function. The models obtained when the sampling time was
0.03s are the best to be utilized in controller design because they have good percentage
fit and are stable too. Moreover, the numerator gain is acceptable.
To improve the system performance conventional PID and self tuning fuzzy-PID
controllers are designed. The coefficients of the PID controller are tuned using trial and
error method and Ziegler- Nichols method. Conventional PID controller achieved very
good performance in simulation, where the steady-state error is zero and the transient
response is fast with small overshoot percentage. When the conventional PID controller
was applied to the experimental set-up, a big overshoot percentage was observed. As a
result, the need to compensate for this error was important by using self tuning fuzzy
PID controller.
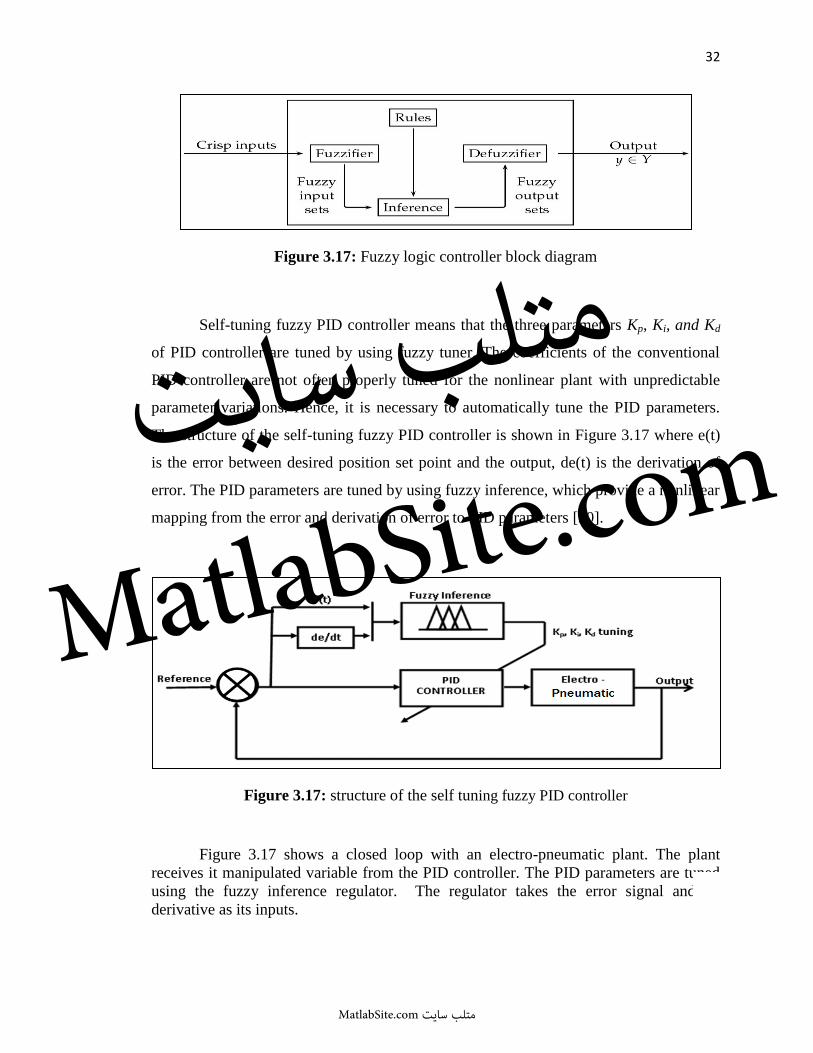
Self-tuning fuzzy PID controller means that the three parameters Kp, Ki and Kp of
PID controller are tuned by using fuzzy tuner. The controller used the error and the
derivative of the error as input to the fuzzy logic tuner. Both simulation and
experimental results of the self tuning fuzzy PID controller performed well in terms of
steady-state response and transient response.
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
55
The system response of the pneumatic system is improved significantly when
applying conversional PID and self-tuning Fuzzy-PID controllers. Self-tuning fuzzy-PID
controller outperformed the conversional PID controller with 2.22% overshoot only and
faster response.
5.2 Recommendations
Upon the completion of this project, there are some spaces for further
improvement. The effectiveness and accuracy of pneumatic actuator can be improved by
following the following suggestion are:
1. Optimize error of electro pneumatic regulator by controlling pressure of
the regulator valve.
2. Use neural network black box modeling.
3. Model the pneumatic actuator system with another model structure such
as Nonlinear Auto Regressive Exogenous (NLARX), Box- Jenkin, or
Output Error (OE).
4. Design a controller by using other controller such as LQR, neural
network controller or auto tuning PID controller.
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
56
CHAPTER 6
PROJECT MANAGEMENT
6.1 Introduction
The objective of project management is to achieve all project goals with effective
project planning, organization and controlling resources within a specified time period.
The primary constrains in this project are the research scope, research time, research
budget and human resources to perform the required activity. Based on the stated
constrains, project schedule had been tabulated on a Gantt chart which gives a clear
guideline in time management of this project.
Next, cost estimation on the components is performed to insure minimal project
cost while keep working efficiently on the project to achieve the requirements. In this
process, market survey on different electronics suppliers is carried out; component
prices are then tabulated to compute the final cost.
6.2 Project Schedule
Table 6.1 shows the project Gantt chart for semester one. This table shows that
the FYP1 activity started from the very first week by choosing the project specialization
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
57
area. The following four weeks were utilized to produce the project proposal. Table 6.1
shows that the literature review activity occupies a period of five weeks. After that, the
experimental setup was connected and checked to ensure that all the hardware
components are working properly. In the last four weeks, the FYP1 presentation and
report documentation took place.
Table 6.1: Project Gantt chart (Semester 1)
N
o Activity
week
1 2 3 4 5 6 7 8 9 1
0
1
1
1
2
1
3
1
4
1
5
1 FYP area specialization
selection
2 FYP title discussion with
the supervisor
3 Project's objectives and
scope definitions
4 Literature review on
Pneumatic systems
5 Literature review
6 Connecting and checking
the pneumatic plant
7 Understanding all the plant
components
8 Methodology definition
9 Pneumatic plant data
acquisition and collection
10 Preparation of FYP1
presentation
11 FYP1 presentation
12 Documentation and report
writing
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
58
Table 6.2 shows the project Gantt chart for semester two. The table shows that
the FYP2 activity was started from the second week by doing the functionality testing of
the pneumatic actuator setup. In the following five weeks, the major activities were I/O
data collection and system modeling with some work on controller design.
Table 6.2 indicates clearly that controller design activity took the longest period
where it was performed starting from week five and ending in week eleven. After that,
experimental validation on the model and controller design was done to check if they
meet the design criteria. The Results were analyzed and discussed in the following three
week. Finally, the FYP2 seminar was held on the 13th
week and the thesis writing was
finished on the 18th
week.
Table 6.2: Project Gantt chart (Semester 2)
No. Activity
week
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-
18
1 Functionality test
2 Data Collection
3 Model estimation
4 Controller design
5
Experimental
Validation
6
Analysis and
discussion
7
Seminar
preparation
8 FYP seminar
9 Thesis writing
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
59
6.3 Cost Estimation
The pneumatic actuator system setup shown in Figure 3.3 is placed in process
control lab (P10) in faculty of electrical engineering. I did not design or fabricate the
experimental setup to do my project; however, it had already been in the lab and many
previous researchers used it in their projects. Table 6.3 shows the overall estimated cost
of the experimental setup.
Table 6.3: Main system components prices
Hardware component Cost per Piece (RM) Quantity Total (RM)
Electro-Pneumatic Regulator 909 2 1818
Communication Cable 135 3 405
LVDT (Position Sensor) 289 1 289
Pneumatic Actuator 98 1 98
Voltage Supply 12V 25 1 25
Test Table 100 1 100
Air Compressor 249 1 249
Air Tubing 50 1 50
Air Tubing 50 1 50
NI DAQ card (NI SCB-68) 350 1 350
(PCI) card (NI SCB-68) 500 1 500
Computer system 1000 1 1000
Shielded cables 300 2 600
Other Electronic Component 50
Total 5584
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
60
REFERENCES
1. Ali, Hazem I., Et Al. "A Review of Pneumatic Actuators (Modeling and
Control)."Australian Journal of Basic and Applied Sciences 3.2 (2009): 440-454.
2. Wang, J., J. Pu, Et Al. (1999). "A Practical Control Strategy for Servo-Pneumatic
Actuator Systems." Control Engineering Practice 7(12): 1483-1488.
3. Shih, M.-C. And S.-I. Tseng (1995). "Identification and Position Control of a Servo
Pneumatic Cylinder." Control Engineering Practice 3(9): 1285-1290.
4. Pandian, Shunmugham R., Et Al. "Pressure Observer-Controller Design for
Pneumatic Cylinder Actuators." Mechatronics, IEEE/ASME Transactions on 7.4
(2002): 490-499.
5. Zhihong, R. And G. M. Bone (2008). "Nonlinear Modeling and Control of Servo
Pneumatic Actuators." Control Systems Technology, IEEE Transactions on 16(3):
562-569.
6. Wang, J., J. D. Wang, Et Al. (2004). "Identification of Pneumatic Cylinder Friction
Parameters Using Genetic Algorithms." Mechatronics, Ieee/Asme Transactions on
9(1): 100-107.
7. Nguyen Thanh, T., T. Dinh Quang, Et Al. (2011). Identification of a Pneumatic
Actuator Using Non-Linear Black-Box Model. Control, Automation and Systems
(Iccas), 2011 11th International Conference.
8. Žilić, T., D. Pavković, Et Al. (2009). "Modeling And Control Of A Pneumatically
Actuated Inverted Pendulum." Isa Transactions 48(3): 327-335.
9. Bogdan, Codres, Et Al. "Identification of A Nonlinear Pneumatic Servo System
Using Modular Neural Networks."
10. Ning, Y., M. Betemps, Et Al. (1991). A Servocontrolled Pneumatic Actuator for
Small Movement-Application to an Adaptive Gripper. Advanced Robotics, 1991.
'Robots In Unstructured Environments', 91 Icar., Fifth International Conference.
11. Filipovic, V., N. Nedic, Et Al. (2011). "Robust Identification Of Pneumatic
ServoActuators In The Real Situations." Forschung Im Ingenieurwesen 75(4): 183-
196.
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
61
12. Chiang, Chiang-Cheng, and Mon-Han Chen. "Robust Adaptive Fuzzy Control of
Uncertain Nonlinear Time-Delay Systems with an Unknown Dead-Zone." Fuzzy
Systems, 2008. Fuzz-Ieee 2008. (IEEE World Congress on Computational
Intelligence). Ieee International Conference On. IEEE, 2008.
13. Chillari, S., S. Guccione, And G. Muscato. "An Experimental Comparison between
Several Pneumatic Position Control Methods." Decision and Control, 2001.
Proceedings of the 40th IEEE Conference On. Vol. 2. IEEE, 2001.
14. Yamazaki, M. And S. Yasunobu (2007). An Intelligent Control for State-Dependent
Nonlinear Actuator and Its Application to Pneumatic Servo System. Sice, 2007
Annual Conference.
15. Sunar, N. H., M. F. Rahmat, Et Al. (2013). Identification and Self-Tuning Control of
Electro-Pneumatic Actuator System with Control Valve. System Engineering and
Technology (ICSET), 2013 IEEE 3rd International Conference.
16. Malaysia, Melaka. "Non-Linear Modeling and Cascade Control of an Industrial
Pneumatic Actuator System." Australian Journal of Basic and Applied Sciences 5.8
(2011): 465-477.
17. Rahmat, M. F., Et Al. "Identification and Non-Linear Control Strategy for Industrial
Pneumatic Actuator." International Journal of Physical Sciences 7.17 (2012): 2565-
2579.
18. Lai, W. K., M. F. Rahmat, and N. Abdul Wahab. "Modeling and Controller Design
of Pneumatic Actuator System with Control Valve." International Journal on Smart
Sensing and Intelligent System 5.3 (2012): 624-644.
19. Sunar, N. H., M. F. Rahmat, Et Al. (2013). Application of Optimization Technique
for PID Controller Tuning In Position Tracking Of Pneumatic Actuator System.
Signal Processing and Its Applications (CSPA), 2013 IEEE 9th International
Colloquium.
20. Zulfatman and M.F. Rahmat, “Application of Self-tuning Fuzzy PID Controller on
Industrial Hydraulic Actuator Using System Identification Approach”, International
Journal on Smart Sensing and Intelligent System. Vol.2. No 2, 2009.
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
62
APPENDIX A
Electro-pneumatic Regulator
ITV1000/2000/3000
Standard Specifications
Straight type Right angle type
JIS Symbol Rated pressure
(MP
a)
Out
put p
ress
ure
This range is outside of the control (output).
0.005 MPa 0
0 100 Input signal (%F.S.)
Graph (1) Input/output characteristics chart
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
63
ITV101_ ITV103_ ITV105_
Model ITV201_ ITV203_ ITV205_
ITV301_ ITV303_ ITV305_
Minimum supply pressure Set pressure +0.1 MPa
Maximum supply pressure 0.2 MPa 1.0 MPa
Set pressure range Note 1) 0.005 to 0.1 MPa 0.005 to 0.5 MPa 0.005 to 0.9 MPa
Voltage 24 VDC 10%, 12 to 15 VDC
Power supply Current Power supply voltage 24 VDC type: 0.12 A or less
consumption Power supply voltage 12 to 15 VDC type: 0.18 A or less
Current type Note 2) 4 to 20 mA, 0 to 20 mA (Sink type)
Input signal Voltage type 0 to 5 VDC, 0 to 10 VDC
Preset input 4 points
Input Current type 250 Ω or less
Voltage type Approx. 6.5 kΩ
impedance
Preset input
Approx. 2.7 kΩ
Note 3) Analog output
1 to 5 VDC (Load impedance: 1 kΩ or more)
Output signal 4 to 20 mA (Sink type) (Load impedance: 250 Ω or less)
(monitor
NPN open collector output: Max. 30 V, 30 mA
output) Switch output
PNP open collector output: Max. 30 mA
Linearity Within 1% (full span)
Hysteresis Within 0.5% (full span)
Repeatability Within 0.5% (full span)
Sensitivity Within 0.2% (full span)
Temperature characteristics Within 0.12% (full span)/C
Output pressure Accuracy 3% (full span)
display Minimum unit MPa: 0.01, kgf/cm2: 0.01, bar: 0.01, PSI: 0.1 Note 4), kPa: 1
Ambient and fluid temperature 0 to 50C (with no condensation)
Enclosure IP65
ITV10__ Approx. 250 g (without options)
Weight ITV20__ Approx. 350 g (without options)
ITV30__ Approx. 645 g (without options)
Note 1) Please refer to “Graph (1)”, relation to the differences between the set pressure and input. Additionally, refer to page 14-8-29 for the set pressure range by units of standard measured pressure. Additionally, refer to page 14-8-29 as maximum set pressure differs on unit of standard measure.
Note 2) 2-wire type 4 to 20 mA is not available. Power supply voltage (24 VDC or 12 to 15 VDC) is required. Note 3) Select either analog output or switch output. Further, when switch output is selected, select either
NPN output or PNP output. Note 4) The minimum unit for ITV205_ is 1PSI. Note 5) The above characteristics are confined to the static state. When air is consumed on the output side, the pressure may fluctuate.
3 ∗ Switch output/PNP output T ∗ NPTF 2 1/4 (1000, 2000, 3000 type) B ∗ Flat bracket
4 ∗ Analog output 4 to 20 mA (Sink type) F ∗ G 3 3/8 (2000, 3000 type) C ∗ L-bracket
∗ Option ∗ Option 4 1/2 (3000 type) ∗ Option
14-8-14
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
64
Electro-pneumatic Regulator Series ITV1000/2000/3000
rSpacer SMC REGULATOR
ITV20__
ITV2000
App
rox.
189
Ap
prox
. 133
eL-bracket
178
qAF30 wAFM30
REGU LAT OR ITV30__
ITV3000
App
rox.
243
Appr
ox. 1
72
234
qAF40 wAFM40
Combinations Standard Combination Combination
specifications possible not possible
∗ ITV10__ models are not applicable.
Sym
bol Applicable model
Specifications ITV20__
ITV30__
Set pressure max. 0.1 MPa 1
Stan
dards
pecif
ica
tions
Set pressure max. 0.5 MPa 3
Set pressure max. 0.9 MPa 5
Connection Rc 1/4 02
Connection Rc 3/8 03
Connection Rc 1/2 04
Acces- Bracket B
sories Bracket C
Optio
nalsp
ecific
ation
s
Connection NPT1/4 N02
Connection NPT3/8 N03
Connection NPT1/2 N04
Connection G 1/4 F02
Connection G 3/8 F03
Connection G 1/2 F04
Modular Products and Accessory Combinations
∗ ITV10__ models are not applicable.
Applicable products and accessories Applicable model
ITV20__
ITV30__
q Air filter AF30 AF40
w Mist separator AFM30 AFM40
e L-bracket B310L B410L
r Spacer Y30 Y40
t Spacer with L-bracket (e + r) Y30L Y40L
F.R.L. AV AU AF AR IR VEX AMR ITV IC VBA VE_ VY1 G
Accessory (Option)/Part No.
Description Part no. Dimensions
ITV10__ ITV20__ ITV30__ Flat bracket
Flat bracket P3020114 100
(Mounting thread is not included.)
L-bracket INI-398-0-6
(Mounting thread is not included.)
5 2 4 0 2 2
Cable
conn
ector Straight TM-4DSX3HG4
type 3 m
PPA
AL
L-bracket
7
25
1 5 4
x
R
30 3 2.3
.
5
36
50
Right angle TM-4DLX3HG4 22
type 3 m
4 x ø7
_36
40
84
60
12
1.6
20
8 x ø4.5 50
4 x ø5.5
40
36
22
14
7 5
70
22
36
4 0
8 x ø4.5 4 x ø5.5
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
65
Series ITV1000/2000/3000
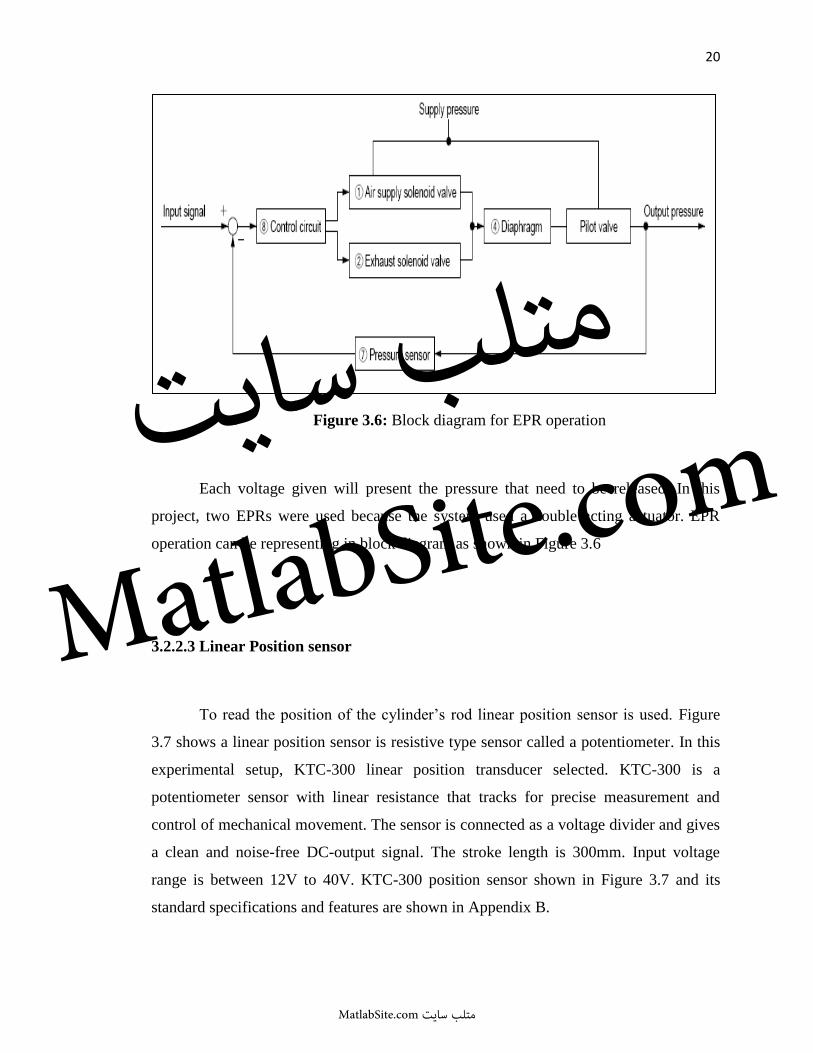
Working Principle When the input signal rises, the air supply solenoid valve q turns ON, and the exhaust solenoid valve w turns OFF. Therefore, supply pressure passes through the air supply solenoid valve q and is applied to the pilot chamber e. The pressure in the pilot chamber e increases and operates on the upper surface of the diaphragm r. As a result, the air supply valve t linked to the diaphragm r opens, and a portion of the supply pressure becomes output pressure. This output pressure feeds back to the control circuit i via the pressure sensor u. Here, a correct operation functions until the output pressure is proportional to the input signal, making it possible to always obtain output pressure proportional to the input signal.
Working Principle Diagram Pressure display
Power supply i Control Output signal
Input signal circuit
Pressure display
Power supply
q Air supply w Exhaust
i Control Output signal solenoid solenoid
Input signal circuit valve
valve
EXH
q Air supply w Exhaust
solenoid
solenoid u Pressure
valve
valve
r Diaphragm sensor
EXH e Pilot
y Exhaust chamber
valve
u Pressure sensor
r Diaphragm e Pilot chamber t Supply EXH
valve
t Supply valve
SUP OUT SUP OUT
EXH
ITV1000 ITV2000, 3000
Block diagram Input signal
i Control circuit
Supply pressure q Air supply solenoid valve
Output pressure r Diaphragm Pilot valve
w Exhaust solenoid valve u Pressure sensor
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
66
Electro-pneumatic Regulator Series ITV1000/2000/3000 Series ITV101_
Linearity Hysteresis Repeatability
1.0 1.0
0.10
Out
put d
evia
tion
fact
or
(%F.
S.)
Out
Out
put d
evia
tion
fact
or
(%F.
S.)
0.5 0.5
Set
pre
ssur
e (M
Pa)
0.08
0.06 0.0 Return
0.0
0.04
–0.5 –0.5
0.02
0.00 25 50 75 100
–1.0 25 50 75 100
–1.0 2 4 6 8 10
0 0 0
Input signal (%F.S.) Input signal (%F.S.) Repetition
Input signal (%F.S.) Input signal (%F.S.) Repetition
VBA VE_ VY1 G PPA AL
Pressure Characteristics
Set pressure:
0.05 MPa
(%F.
S.) 1.0
0.5
fact
or Set point
0.0
devi
atio
n
–0.5
Out
put
–1.0
0.0 0.1 0.2 0.3
Supply pressure (MPa)
Flow Characteristics Supply pressure:
0.2 MPa
0.15
(MPa
)
0.10
pres
sure
0.05
Set
0 200 400 600
Flow rate ( /min (ANR))
Relief Flow Characteristics Supply pressure:
0.2 MPa
0.25
(MP
a) 0.20
0.15
Set p
ress
ure
0.10
0.05
0.000 200 400 600 800
Flow rate ( /min (ANR))
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
67
Electro-pneumatic Regulator Series ITV1000/2000/3000
Dimensions ITV10__ Flat bracket Note) Do not attempt to rotate, as the cable connector does not turn.
Cable connector (4-wire) Cable connector (4-wire)
Right angle type Straight type
_50 4 x ø7
Mounting hole ( 3 1 )
SMCE
P REGULATOR SMC E
P RE GULAT OR
RESET
52
SET
UNLOCK LOCK ITV1000 ITV1000
Setting part
84
100
12.5 M12 x 1
Cable connection threads
( 1 1 )
SMCE
P REGULATOR
MPa
ITV10
INPUT 0~10VDC
Rc1/8
OUTPUT 0.005~0.5MPa
M3 x 0.5 MADE IN JAPAN GY
7 1
Exhaust port
Solenoid valve
EXH Solenoid valve EXH
G 2 OUT
SUP (1) OUT (2)
19.5 EXH (3)
1 1
1 2
40 Flat bracket 2 x Rc1/8, 1/4
P3020114
Port size
(Optional)
4 x M4 x 0.7 thread depth 6 mm through Mounting hole
L-bracket
F.R.L. AV AU AF AR IR VEX AMR ITV IC VBA VE_ VY1 G PPA AL
G
15 .5
R3
2 5 7
(10) 30
(7) 36 L-bracket
INI-398-0-6
(Optional)
2 OUT
22 2.3
45 2 x Rc1/8, 1/4 SUP port, OUT port
متلب سایت
MatlabSite.com
MatlabSite.com متلب سایت
68
APPENDIX B
KTC / KTF Linear sensor 75-1000 mm Potentiometric transducer with conductive track suitable for measurment, monitoring and control of mechanical strokes. Critical in providing a smooth output, mechanically dependent on the stable glide of the shaft and wiper on the element’s surface. Applications such as industrial controls, robotics, process systems or replacement of a linear voltage differential trans- former (LVDT) are ideal uses for this versatile, reliable model.
Features:
Case ... Brushes ... Resistance track ... Control rod ... Resolution ... Repeatability ... Life time ...
Electrical connections ...
Temperature range ...
.Anodised aluminium ..Noble metal
.. Conductive plastic on polymer base ..Stainless steel
.. Infinitie .within 0,013 mm
..>25x106 meters or >100x106 cycles ...4-pole connector to DIN
..43650 ISO 4400 . -55ºC- +125ºC
Output options
Contact Standard 4-20 mA 1 - supply - supply 2 Signal 0-V+- 4-20 mA 3 + supply + 15-35 V
Mechanical dimensions KTC
Max supply voltage at 70°C .................................................... .40 VDC Recommended cursor current ... .......................................... .. <1mMechanical dimensions KTF Rod end bearing (KTC-01)