16.810 (16.682) 16.810 (16.682) Engineering Design and Rapid Prototyping Engineering Design and Rapid Prototyping Design Optimization - Structural Design Optimization Instructor(s) Prof. Olivier de Weck Dr. Il Yong Kim January 23, 2004
Transcript
16.810 (16.682) 16.810 (16.682)
Engineering Design and Rapid Prototyping Engineering Design and Rapid Prototyping
Raino A.E. Makinen et al., “Multidisciplinary shape optimization in aerodynamics and electromagnetics using genetic algorithms,” International Journal for Numerical Methods in Fluids, Vol. 30, pp. 149-159, 1999
16.810 (16.682) 18
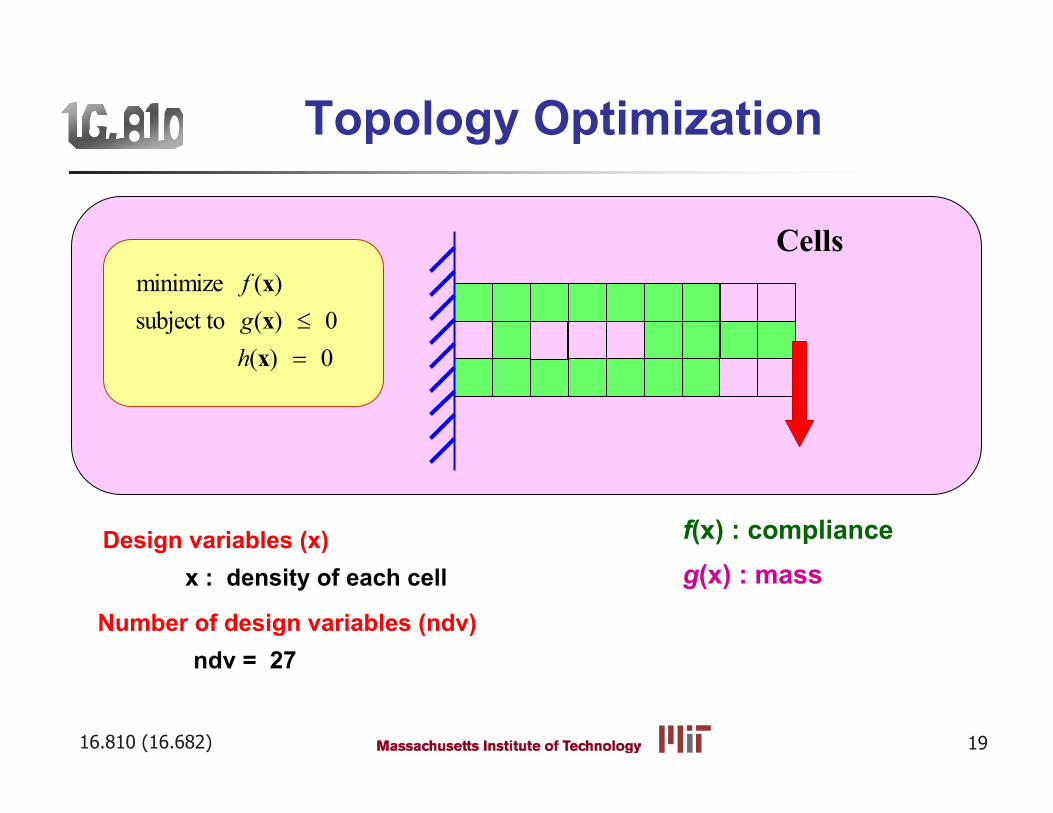
Topology Optimization
Cells( )
j ( ) 0 ( ) 0
fgh
xxx
minimize sub ect to
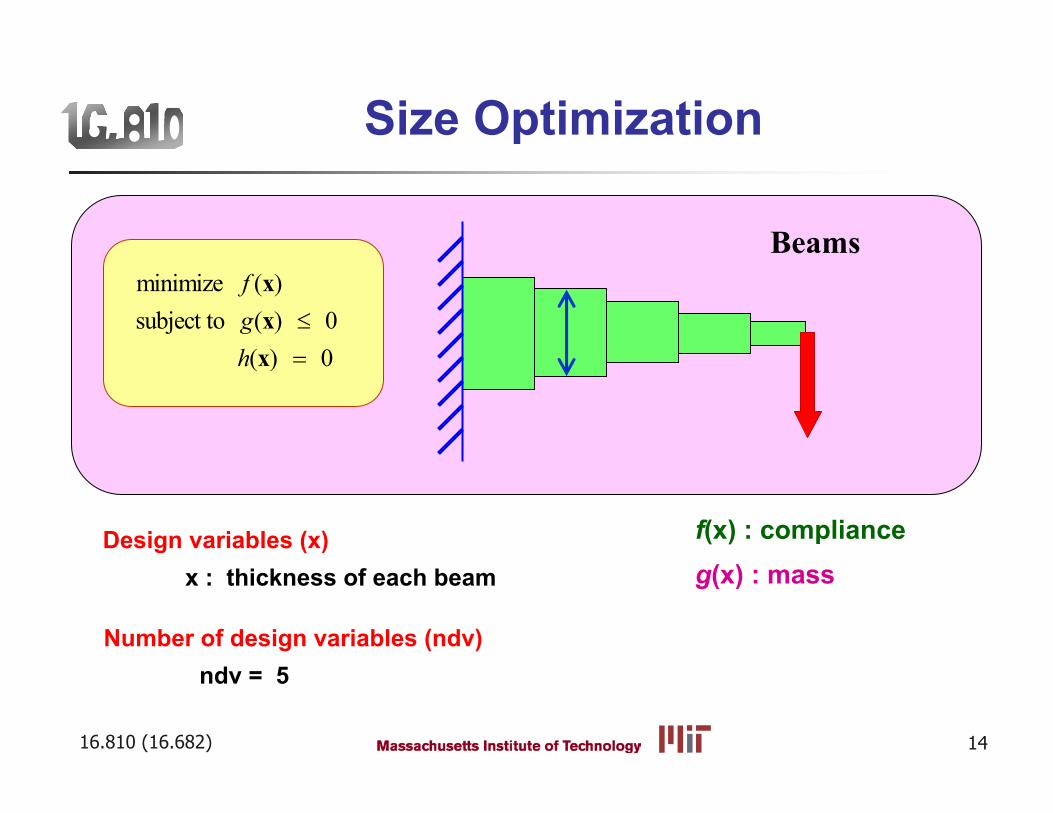
Design variables (x) f(x) : compliance
x : density of each cell g(x) : mass
Number of design variables (ndv) ndv = 27
16.810 (16.682) 19
Topology Optimization
Short Cantilever problem
Initial
Optimized
16.810 (16.682) 20
Topology Optimization
16.810 (16.682) 21
Topology Optimization
Bridge problem
Obj = 4.16 105
Distributed loading
Obj = 3.29 105
Minimize i i d z F ,
)to Subject ( d x M ,o
0 (x) 1 Obj = 2.88 105
Mass constraints: 35%
Obj = 2.73 105
16.810 (16.682) 22
Topology Optimization
DongJak Bridge in Seoul, Korea
H
L
H
16.810 (16.682) 23
Structural Optimization
What determines the type of structural optimization?
Type of the design variable
(How to describe the design?)
16.810 (16.682) 24
Optimum Solution – Graphical Representation
f(x)x: design variable
f(x): displacement
Optimum solution (x*) x
16.810 (16.682) 25
Optimization Methods
Gradient-based methods
Heuristic methods
16.810 (16.682) 26
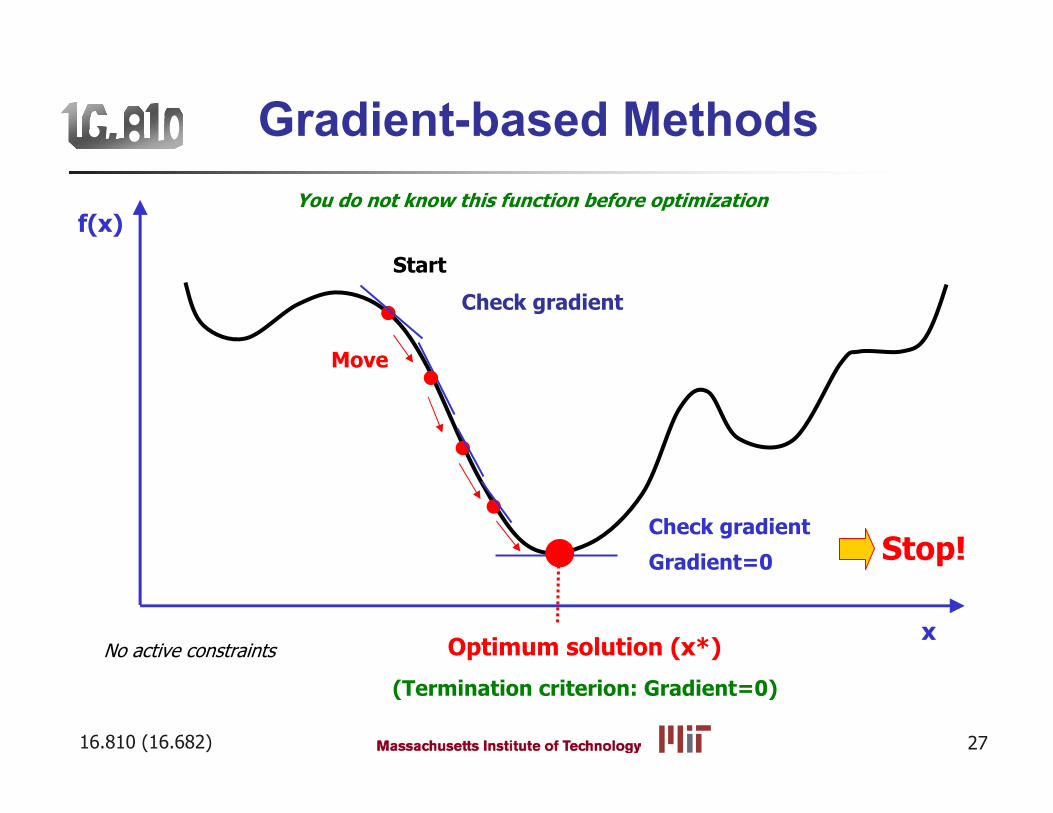
Gradient-based Methods
f(x)
Start
Move
Gradient=0 Stop!
You do no c ore optimization
Check gradient
Check gradient
t know this fun tion bef
No active constraints Optimum solution (x*) x
(Termination criterion: Gradient=0)
16.810 (16.682) 27
Gradient-based Methods
16.810 (16.682) 28
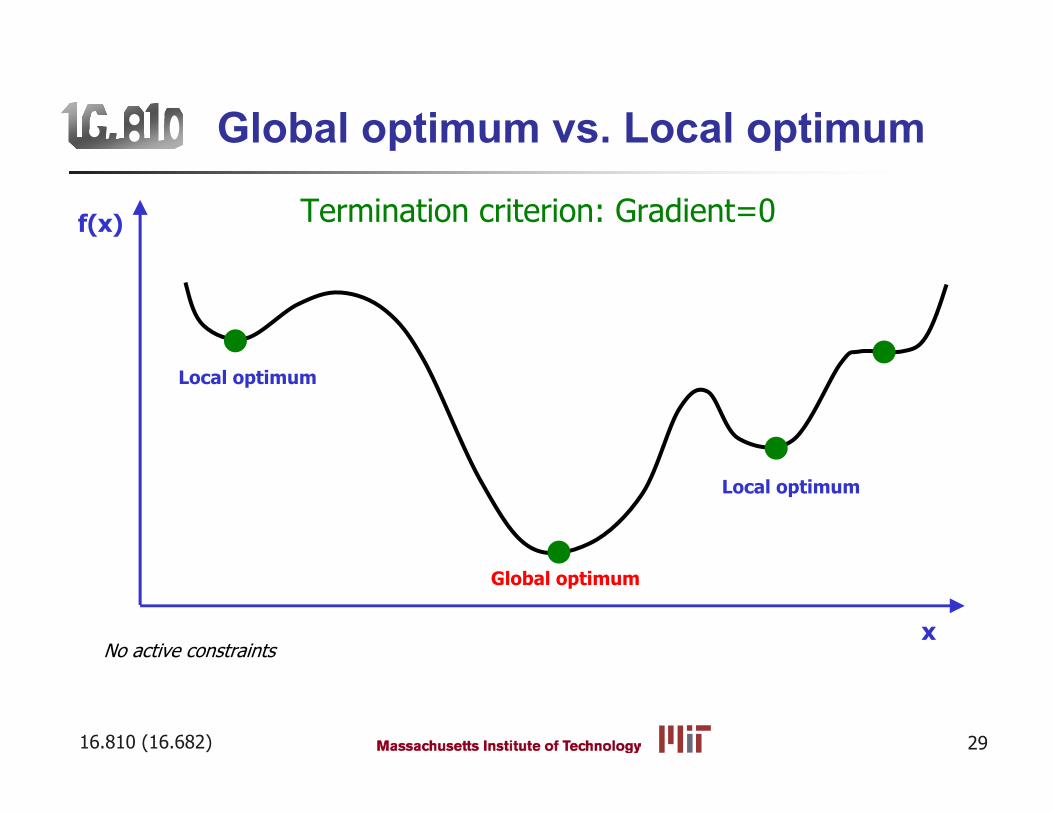
Global optimum vs. Local optimum
f(x) Termination criterion: Gradient=0
Global optimum
Local optimum
Local optimum
x No active constraints
16.810 (16.682) 29
Heuristic Methods
A Heuristic is simply a rule of thumb that hopefully will find a good answer.
Why use a Heuristic?
Heuristics are typically used to solve complex optimization problems that are difficult to solve to optimality.
Heuristics are good at dealing with local optima without getting stuck in them while searching for the global optimum.
Schulz, A.S., “Metaheuristics,” 15.057 Systems Optimization Course Notes, MIT, 1999.
16.810 (16.682) 30
Genetic Algorithm
Principle by Charles Darwin - Natural Selection
16.810 (16.682) 31
Heuristic Methods
Heuristics Often Incorporate Randomization
3 Most Common Heuristic Techniques Genetic Algorithms Simulated Annealing Tabu Search
Centroid Jitter on Focal Plane [RSS LOS] NASA Nexus Spacecraft Concept 60
T=5 sec
14.97 m
1 pixel
Requirement: J =5 mz,2
OTA
40
20
Cen
troid
Y [
m]
0
-20
Sunshield Instrument -40Module
0 1 2 -60-60 -40 -20 0 20 40 60 meters
Centroid X [ m]
Goal: Find a “balanced” system design, where the flexible structure, the optics and the control systems work together to achieve a desired pointing performance, given various constraints
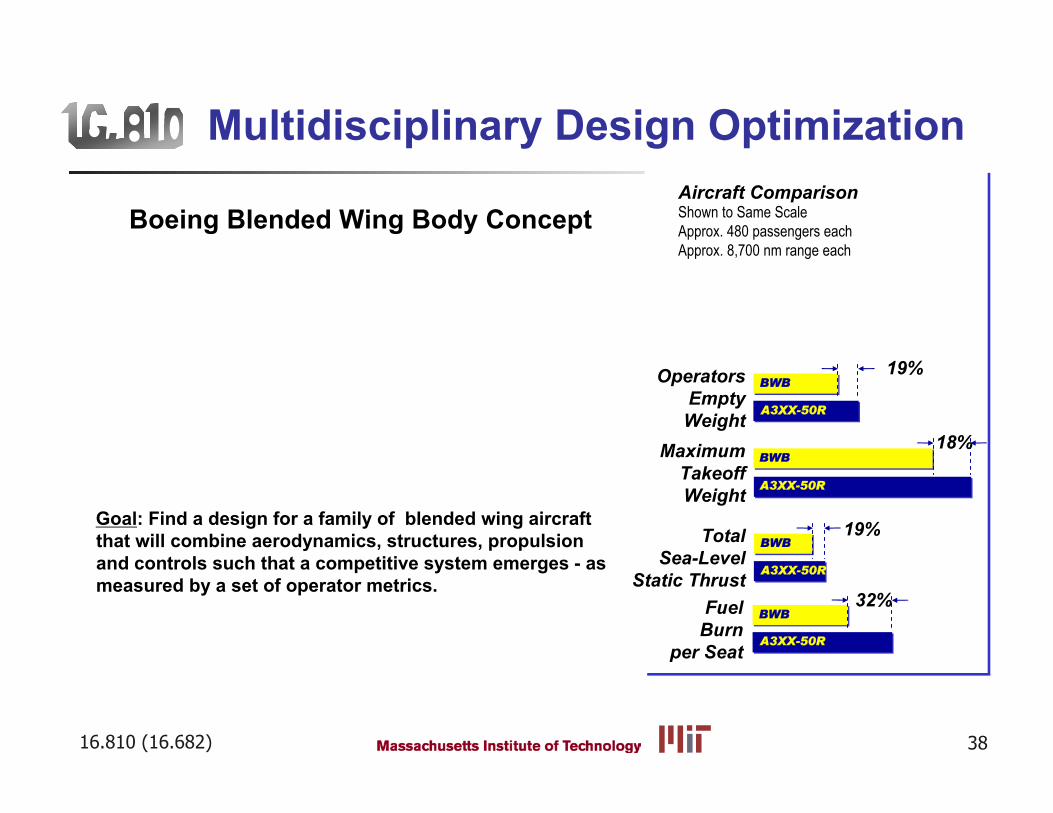
le Approx. 480 passengers each Approx. 8,700 nm range each
TakeoffBWB
A3XX-50R
18%
BWB
A3XX-50R
19%TotalSea-Level
19%BWB
A3XX-50R
OperatorsEmpty
FuelBurn
per Seat
32%BWB
A3XX-50R
Boeing Blended Wing Body Concept
Goal
Shown to Same Sca
Maximum
Weight
Static Thrust
Weight
: Find a design for a family of blended wing aircraft that will combine aerodynamics, structures, propulsion and controls such that a competitive system emerges - as measured by a set of operator metrics.
16.810 (16.682) 38
Multidisciplinary Design Optimization
Ferrari 360 Spider
Goal: High end vehicle shape optimization while improving car safety for fixed performance level and given geometric constraints
Reference: G. Lombardi, A. Vicere, H. Paap, G. Manacorda, “Optimized Aerodynamic Design for High Performance Cars”, AIAA-98- 4789, MAO Conference, St. Louis, 1998
16.810 (16.682) 39
Multidisciplinary Design Optimization
16.810 (16.682) 40
Multidisciplinary Design Optimization
16.810 (16.682) 41
Multidisciplinary Design Optimization
Do you want to learn more about MDO?
Take this course!
16.888/ESD.77
Multidisciplinary System Design Optimization (MSDO)
P. Y. Papalambros, Principles of optimal design, Cambridge University Press, 2000
O. de Weck and K. Willcox, Multidisciplinary System Design Optimization, MIT lecture note, 2003
M. O. Bendsoe and N. Kikuchi, “Generating optimal topologies in structural design using a homogenization method,” comp. Meth. Appl. Mech. Engng, Vol. 71, pp. 197-224, 1988
Raino A.E. Makinen et al., “Multidisciplinary shape optimization in aerodynamics and electromagnetics using genetic algorithms,” International Journal for Numerical Methods in Fluids, Vol. 30, pp. 149-159, 1999
Il Yong Kim and Byung Man Kwak, “Design space optimization using a numerical design continuation method,” International Journal for Numerical Methods in Engineering, Vol. 53, Issue 8, pp. 1979-2002, March 20, 2002.
16.810 (16.682) 53
Web-based topology optimization program
Developed and maintained by Dmitri Tcherniak, Ole Sigmund,Thomas A. Poulsen and Thomas Buhl.