1 Digital Signal Processing, III, Zheng-Hua Tan, 2006 1 Digital Signal Processing, Fall 2006 Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark [email protected]Lecture 3: The z-transform Digital Signal Processing, III, Zheng-Hua Tan, 2006 2 Course at a glance Discrete-time signals and systems Fourier-domain representation DFT/FFT System structures Filter structures Filter design Filter z-transform MM1 MM2 MM9,MM10 MM3 MM6 MM4 MM7 MM8 Sampling and reconstruction MM5 System analysis System
Transcript
1
Digital Signal Processing, III, Zheng-Hua Tan, 20061
Digital Signal Processing, Fall 2006
Zheng-Hua Tan
Department of Electronic Systems Aalborg University, Denmark
Digital Signal Processing, III, Zheng-Hua Tan, 20062
Course at a glance
Discrete-time signals and systems
Fourier-domain representation
DFT/FFT
Systemstructures
Filter structures Filter design
Filter
z-transform
MM1
MM2
MM9,MM10MM3
MM6
MM4
MM7 MM8
Sampling andreconstruction MM5
Systemanalysis
System
2
Digital Signal Processing, III, Zheng-Hua Tan, 20063
Part I: z-transform
z-transformProperties of the ROC Inverse z-transformProperties of z-transform
Digital Signal Processing, III, Zheng-Hua Tan, 20064
Limitation of Fourier transform
Fourier transform
Condition for the convergence of the infinite sum
If x[n] is absolutely summable, its Fourier transform exists (sufficient condition). Example
)(21][
][)(
∫
∑
−
−∞
−∞=
=
=
π
πωω
ωω
ωπ
deeXnx
enxeX
njj
nj
n
j
∞<≤≤= ∑∑∑∞
−∞=
−∞
−∞=
−∞
−∞= n
nj
n
nj
n
j nxenxenxeX |][| |||][| |][| |)(| ωωω
- :1||
)2(1
1 )( :1
11 )( :1|| ][][
>
++−
==
−=<=
∑∞
−∞=−
−
a
ke
eXa
aeeXanuanx
kj
j
jjn
πωπδωω
ωω
3
Digital Signal Processing, III, Zheng-Hua Tan, 20065
z-transform
Fourier transform
z-transform
The complex variable z in polar form
)()( 1 jωeXzX,r|z| ===
jωrez =
nj
n
j enxeX ][)( ωω −∞
−∞=∑=
)(][ ][)( zXnxznxzXZ
n
n↔= −
∞
−∞=∑
njnnjj ernxrenxreXzX ωωω −−∞
∞−
−∞
∞−∑∑ === )][()(][)()(
Digital Signal Processing, III, Zheng-Hua Tan, 20066
z-plane
z-transform is a function of a complex variable using the complex z-plane
Z-transform on unit circle<-> Fourier transform
Linear frequency axis in Fourier transform
Unit circle in z-transform(periodicity in freq. of Fourier transform)
4
Digital Signal Processing, III, Zheng-Hua Tan, 20067
Region of convergence – ROC
Fourier transform does not converge for all sequences
z-transform does not converge for all sequences or for all values of z.
ROC – for any given seq., the set of values of z for which the z-transform converges
nj
n
j enxeX ωω −∞
−∞=∑= ][)(
∞<∑∞
−∞=
− || |][| n
nznx∑∞
−∞=
− ∞<n
nrnx |][|
nj
n
nn
n
j ernxznxreX ωω −∞
−∞=
−−∞
−∞=∑∑ === )][( ][)(X(z)
ROC is ring!
Digital Signal Processing, III, Zheng-Hua Tan, 20068
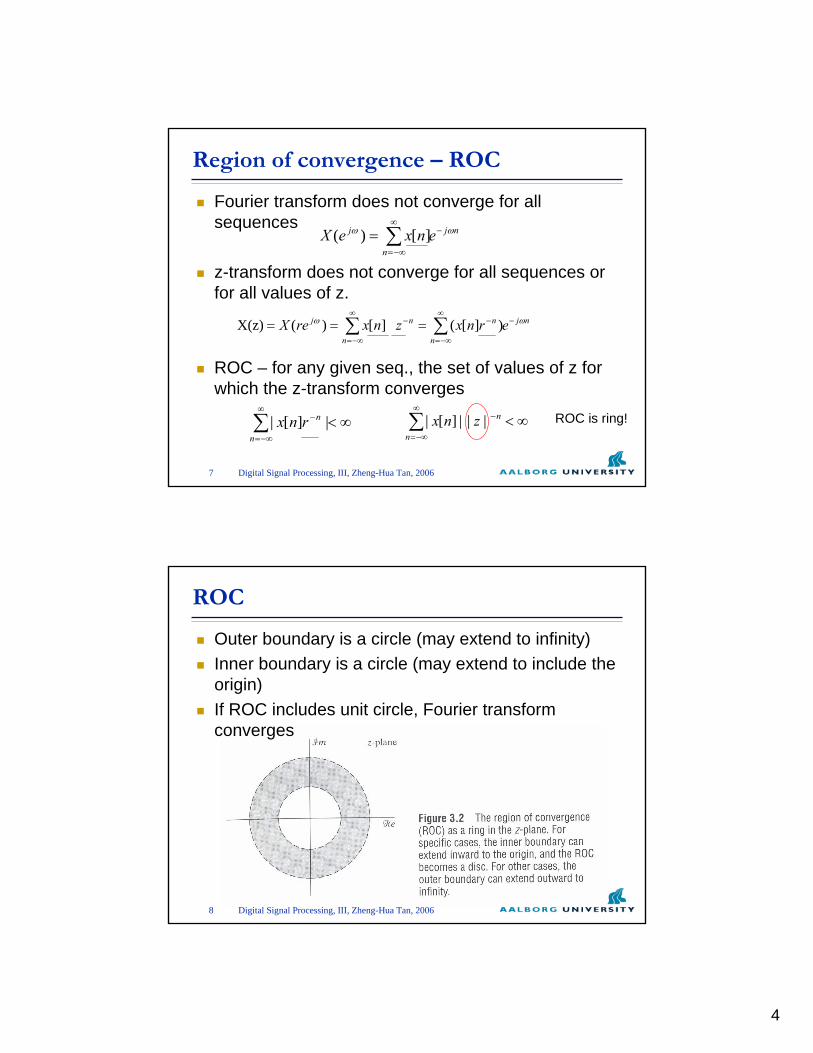
ROC
Outer boundary is a circle (may extend to infinity)Inner boundary is a circle (may extend to include the origin)If ROC includes unit circle, Fourier transform converges
5
Digital Signal Processing, III, Zheng-Hua Tan, 20069
Zeros and poles
The most important and useful z-transforms –rational function:
Zeros: values of z for which X(z)=0.Poles : values of z for which X(z) is infinite. Close relation between poles and ROC
zzQzPzQzPzX
in spolynomial are )( and )()()()( =
Digital Signal Processing, III, Zheng-Hua Tan, 200610
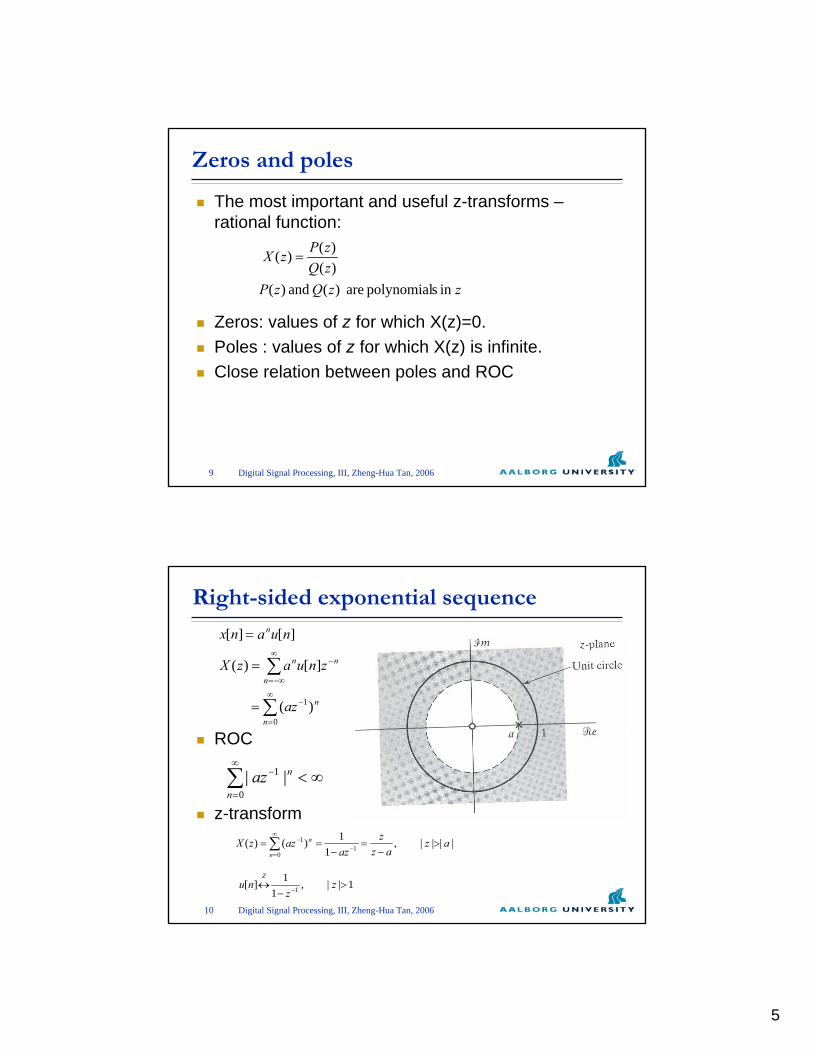
Right-sided exponential sequence
ROC
z-transform
∑
∑∞
=
−
∞
−∞=
−
=
=
=
0
1)(
][)(
][][
n
n
n
nn
n
az
znuazX
nuanx
∞<∑∞
=
−
0
1 ||n
naz
1||,1
1][ 1 >−
↔ − zz
nuZ
||||,1
1)()( 10
1 azazz
azazzX
n
n >−
=−
== −
∞
=
−∑
6
Digital Signal Processing, III, Zheng-Hua Tan, 200611
Left-sided exponential sequence
ROC
z-transform
∑∑
∑∞
=
−−
−∞=
−
∞
−∞=
−
−=−=
−−−=
−−−=
0
11
)(1
]1[)(
]1[][
n
n
n
nn
n
nn
n
zaza
znuazX
nuanx
∞<∑∞
=
−
0
1 ||n
nza
||||,1
1)( 1 azazz
azzX <
−=
−= −
Digital Signal Processing, III, Zheng-Hua Tan, 200612
Sum of two exponential sequence
ROC)
31)(
21(
)121(2
311
1
211
1
)31()
21()(
][)31(][)
21(][
11
0
1
0
1
+−
−=
++
−=
−+=
−+=
−−
∞
=
−∞
=
− ∑∑
zz
zz
zz
zzzX
nununx
n
n
n
n
nn
21||
31|| and
21||
1|)31(| and 1|
21| 11
>
>>
<−< −−
z
zz
zz
7
Digital Signal Processing, III, Zheng-Hua Tan, 200613
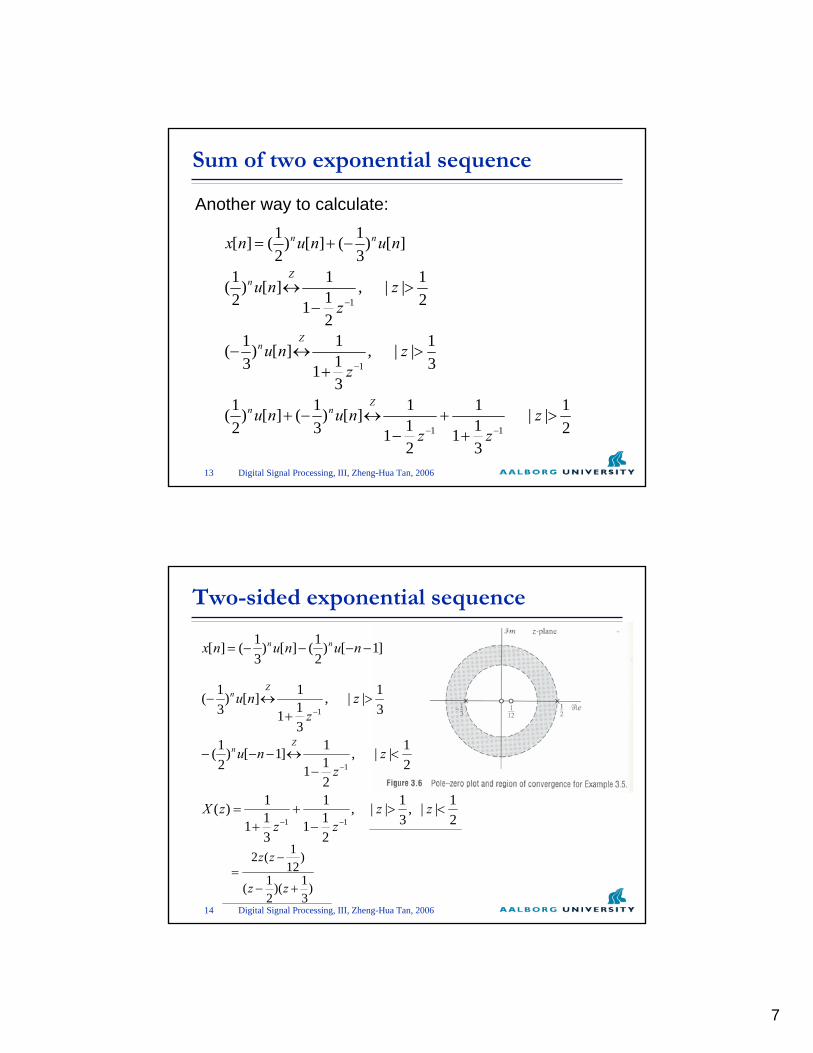
Sum of two exponential sequence
Another way to calculate:
21||
311
1
211
1][)31(][)
21(
31|| ,
311
1][)31(
21|| ,
211
1][)21(
][)31(][)
21(][
11
1
1
>+
+−
↔−+
>+
↔−
>−
↔
−+=
−−
−
−
zzz
nunu
zz
nu
zz
nu
nununx
Znn
Zn
Zn
nn
Digital Signal Processing, III, Zheng-Hua Tan, 200614
Two-sided exponential sequence
21|| ,
31|| ,
211
1
311
1)(
21|| ,
211
1]1[)21(
31|| ,
311
1][)31(
11
1
1
<>−
++
=
<−
↔−−−
>+
↔−
−−
−
−
zzzz
zX
zz
nu
zz
nu
Zn
Zn
]1[)21(][)
31(][ −−−−= nununx nn
)31)(
21(
)121(2
+−
−=
zz
zz
8
Digital Signal Processing, III, Zheng-Hua Tan, 200615
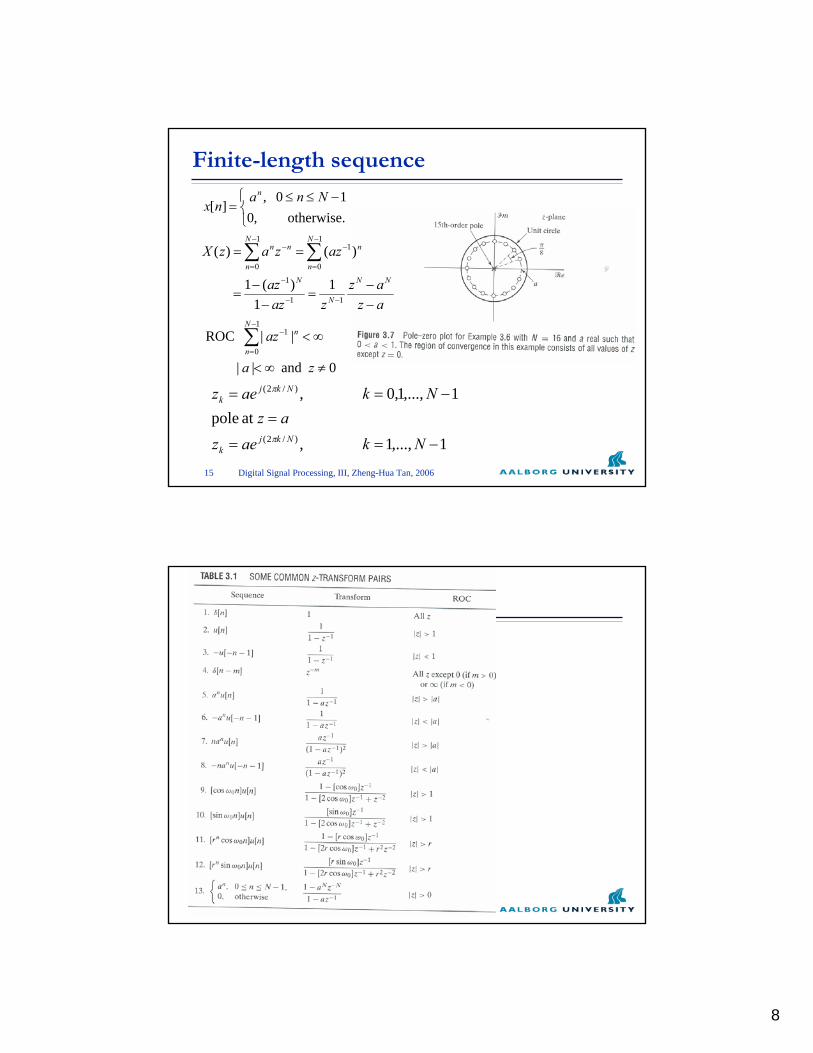
Finite-length sequence
⎩⎨⎧ −≤≤
= otherwise. ,0
10 ,][
Nnanx
n
azaz
zazaz
zazazX
NN
N
N
nN
n
nN
n
n
−−
=−
−=
==
−−
−
−−
=
−−
=∑∑
11
1
11
0
1
0
11
)(1
)()(
0 and ||
|| ROC1
0
1
≠∞<
∞<∑−
=
−
za
azN
n
n
1,...,1 ,at pole
1,...,1,0 ,
)/2(
)/2(
−==
=−==
Nkaezaz
Nkaez
Nkjk
Nkjk
π
π
Digital Signal Processing, III, Zheng-Hua Tan, 200616
Some common z-transform pairs
9
Digital Signal Processing, III, Zheng-Hua Tan, 200617
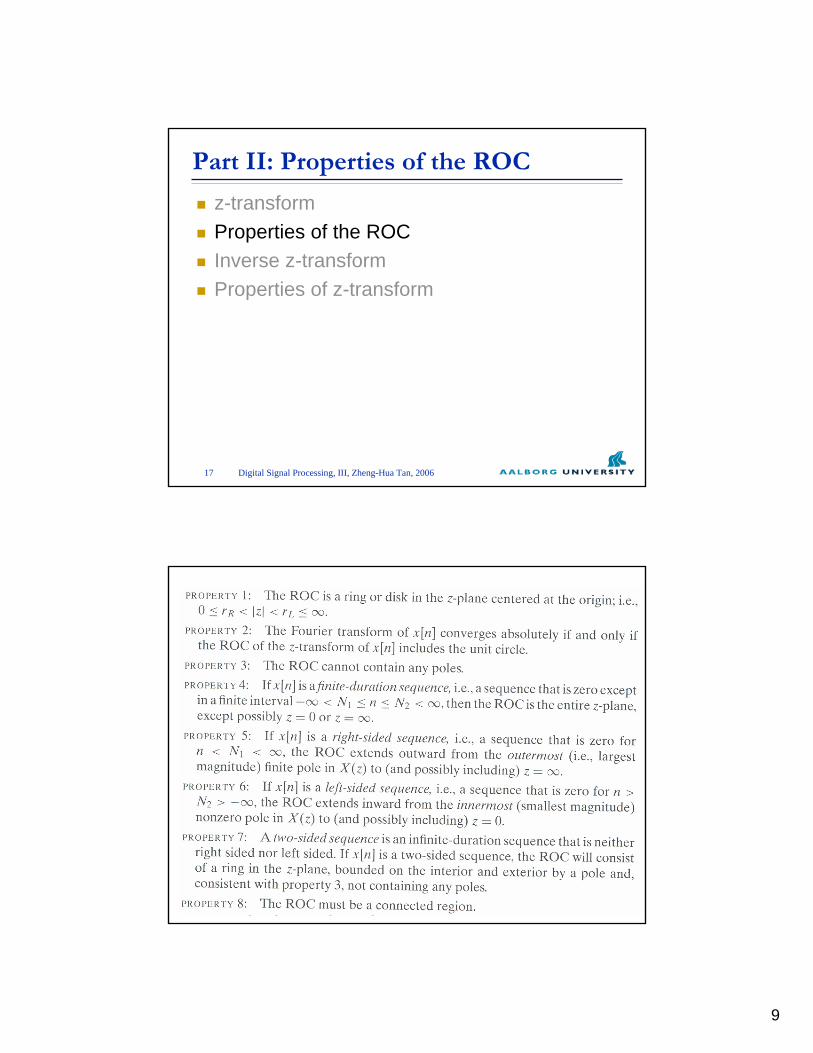
Part II: Properties of the ROC
z-transformProperties of the ROC Inverse z-transformProperties of z-transform
Digital Signal Processing, III, Zheng-Hua Tan, 200618
Properties of the ROC
10
Digital Signal Processing, III, Zheng-Hua Tan, 200619
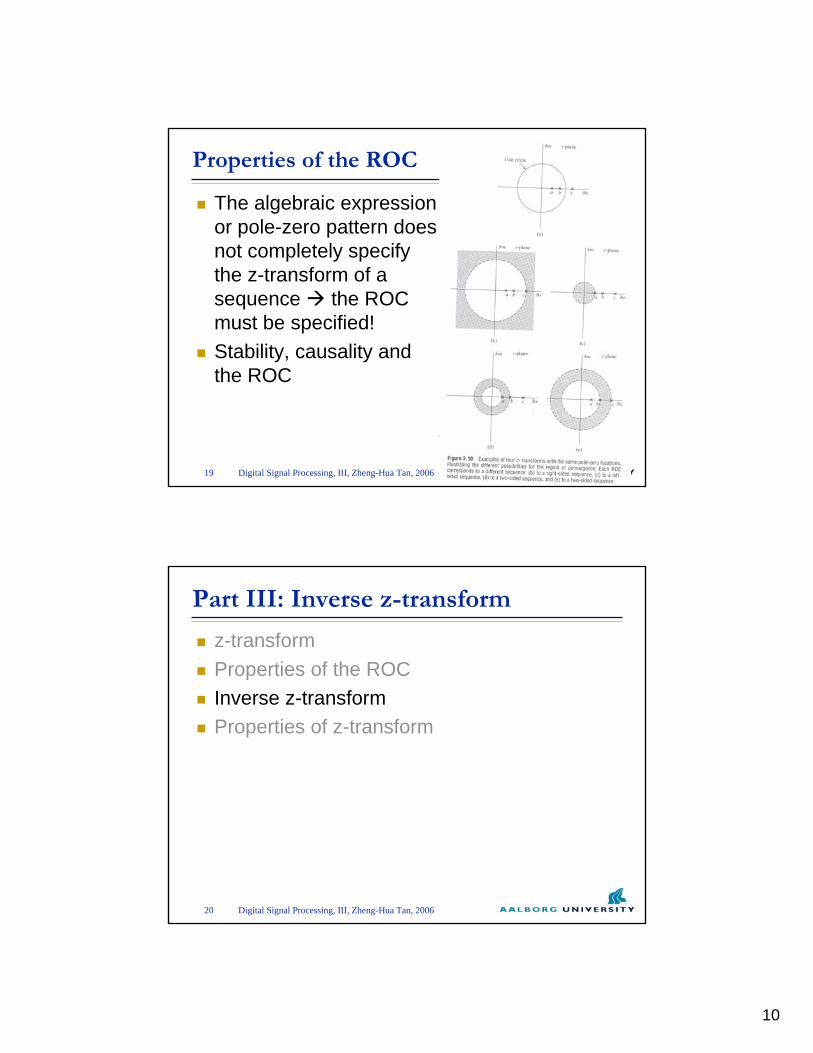
Properties of the ROC
The algebraic expressionor pole-zero pattern doesnot completely specifythe z-transform of a sequence the ROC must be specified!Stability, causality and the ROC
Digital Signal Processing, III, Zheng-Hua Tan, 200620
Part III: Inverse z-transform
z-transformProperties of the ROC Inverse z-transformProperties of z-transform
11
Digital Signal Processing, III, Zheng-Hua Tan, 200621
Inverse z-transform
Needed for system analysis: 1) z-transform, 2) manipulation, 3) inverse z-transform.Approaches:
Inspection methodPartial fraction expansionPower series expansion
Digital Signal Processing, III, Zheng-Hua Tan, 200622
Inspection method
By inspection, e.g.
Make use of
21|| ),
211
1()(1
>−
=−
zz
zX
?21|| if <z
][)21(][ nunx n=∴
|||| ),1
1()( 1 azaz
nuaZ
n >−
↔ −
]1[)21(][ course, of −−−= nunx n
12
Digital Signal Processing, III, Zheng-Hua Tan, 200623
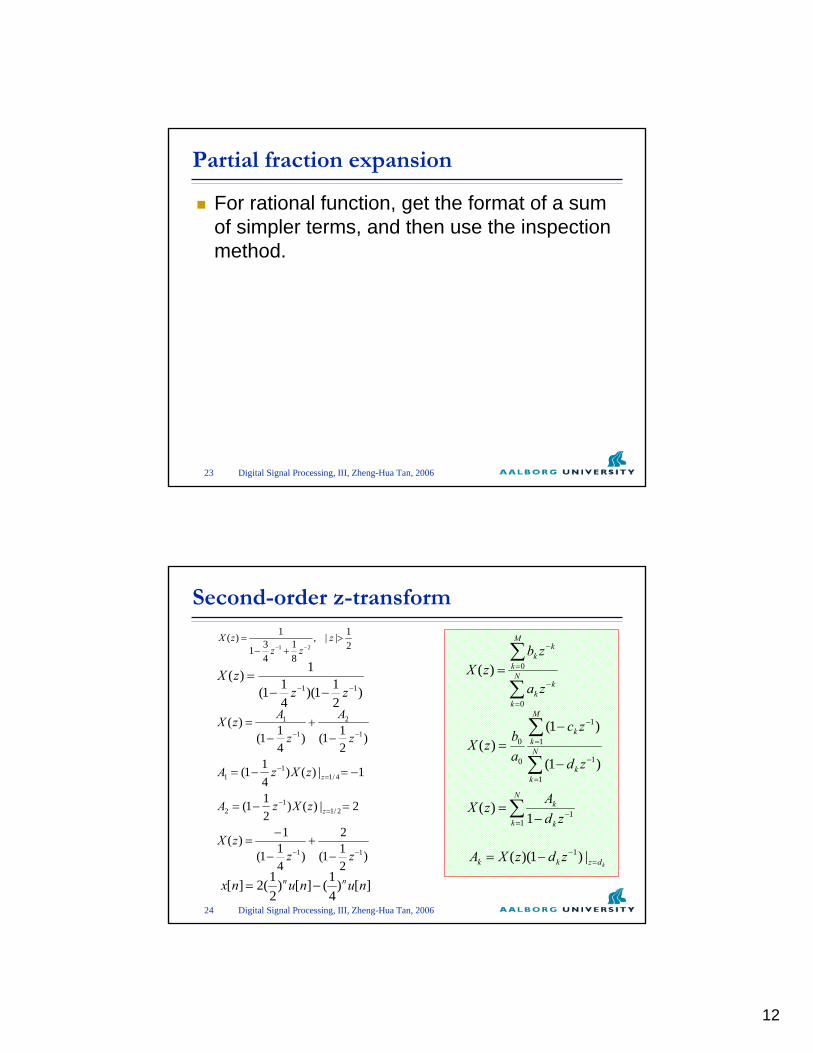
Partial fraction expansion
For rational function, get the format of a sum of simpler terms, and then use the inspection method.
Digital Signal Processing, III, Zheng-Hua Tan, 200624
Second-order z-transform
)211)(
411(
1)(11 −− −−
=zz
zX
][)41(][)
21(2][ nununx nn −=
)211(
2
)411(
1)(
2|)()211(
1|)()411(
)211()
411(
)(
11
2/11
2
4/11
1
1
2
1
1
−−
=−
=−
−−
−+
−
−=
=−=
−=−=
−+
−=
zzzX
zXzA
zXzA
z
A
z
AzX
z
z
∑
∑
=
−
=
−
= N
k
kk
M
k
kk
za
zbzX
0
0)(
∑=
−−=
N
k k
k
zdAzX
111
)(
∑
∑
=
−
=
−
−
−= N
kk
M
kk
zd
zc
abzX
1
1
1
1
0
0
)1(
)1()(
kdzkk zdzXA =−−= |)1)(( 1
21|| ,
81
431
1)(21
>+−
=−−
zzz
zX
13
Digital Signal Processing, III, Zheng-Hua Tan, 200625
What about M>=N?
)1)(211(
)1()(11
21
−−
−
−−
+=
zz
zzX
][8][)21(9][2][ nununnx n +−= δ
)1(8
)211(
92)(
8|)()1(
9|)()211(
division. longby Found 2
)1()211(
)(
11
11
2
2/11
1
0
12
1
10
−−
=−
=−
−−
−+
−−=
=−=
−=−=
=
−+
−+=
zzzX
zXzA
zXzA
B
zA
z
ABzX
z
z
1|| ,
21
231
21)(21
21
>+−
++=
−−
−−
zzz
zzzX
15 23
2121
23
21
1
12
1212
−−
+−
+++−
−
−−
−−−−
zzz
zzzz
Digital Signal Processing, III, Zheng-Hua Tan, 200626
Power series expansion
By long division
][][ nuanx n=
|||| ,1
1)( 1 azaz
zX >−
= −
...11
1 2211 +++=
−−−
− zaazaz
...
1
...1 11
22
221
1
1
221
1
−
−−
−
−
−−
−
−
−
+++−
zazaaz
azaz
zaazaz
14
Digital Signal Processing, III, Zheng-Hua Tan, 200627
Finite-length sequence
12
1112
211
21)(
)1)(1)(211()(
−
−−−
+−−=
−+−=
zzzzX
zzzzzX
]1[21][]1[
21]2[][ −+−+−+= nnnnnx δδδδ
Digital Signal Processing, III, Zheng-Hua Tan, 200628
Part IV: Properties of z-transform
z-transformProperties of the ROC Inverse z-transformProperties of z-transform
15
Digital Signal Processing, III, Zheng-Hua Tan, 200629
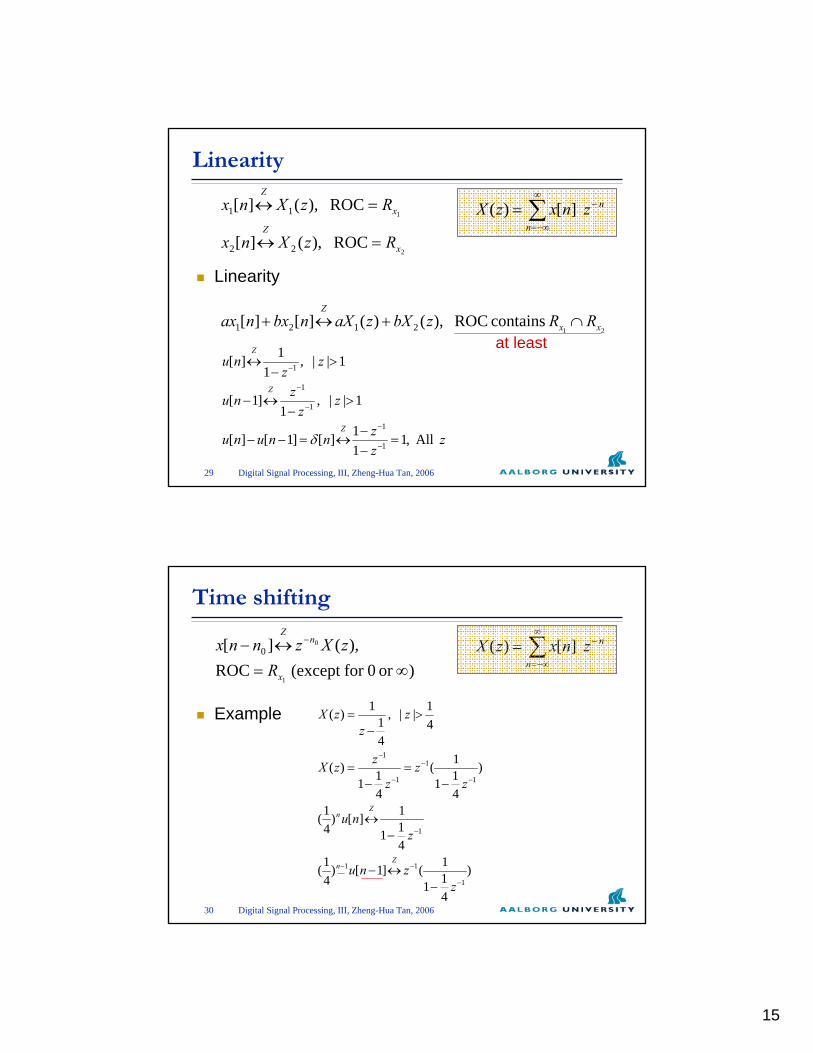
Linearity
Linearity
21 contains ROC ),()(][][ 2121 xx
ZRRzbXzaXnbxnax ∩+↔+
zzznnunu
zzznu
zz
nu
Z
Z
Z
All ,111][]1[][
1|| ,1
]1[
1|| ,1
1][
1
1
1
1
1
=−−
↔=−−
>−
↔−
>−
↔
−
−
−
−
−
δ
2
1
ROC ),(][
ROC ),(][
22
11
x
Z
x
Z
RzXnx
RzXnx
=↔
=↔ ][)( n
nznxzX −
∞
−∞=∑=
at least
Digital Signal Processing, III, Zheng-Hua Tan, 200630
Time shifting
Example
)
411
1(]1[)41(
411
1][)41(
)
411
1(
411
)(
41|| ,
41
1)(
1
11
1
1
1
1
1
−
−−
−
−
−
−
−
−↔−
−↔
−=
−=
>−
=
zznu
znu
zz
z
zzX
zz
zX
Zn
Zn
)or 0for (except ROC ),(][
1
00
∞=↔− −
x
nZ
RzXznnx ][)( n
nznxzX −
∞
−∞=∑=
16
Digital Signal Processing, III, Zheng-Hua Tan, 200631
Multiplication by exponential sequence
Examples
azazaz
nua
zz
nu
Zn
Z
>−
=−
↔
>−
↔
−−
−
|| ,1
1)/(1
1][
1|| ,1
1][
11
1
)(][
ROC ),/(][
)(
000
00 ωωω −↔
=↔
jF
nj
x
Zn
eXnxe
|R|zzzXnxz ][)( n
nznxzX −
∞
−∞=∑=
1|| ,cos21
)cos1(1
21
121
)(
][)(21][)(
21][)cos(][
210
10
11
0
00
00
>+−
−=
−+
−=
+==
−−
−
−−−
−
zzz
zzeze
zX
nuenuenunnx
jj
njnj
ωω
ω
ωω
ωω
Digital Signal Processing, III, Zheng-Hua Tan, 200632
Differentiation of X(z)
Example
]1[)(][
]1[)(][
|||| ,1
)(][
1)(
|||| ),1log()(
1
1
1
1
1
2
1
−−
=
−−=
>+
=−↔
+−
=
>+=
−
−
−
−
−
−
−
nunaanx
nuaannx
azazaz
dzzdXznnx
azaz
dzzdX
azazzX
n
n
Z
x
ZR
dzzdXznnx =−↔ ROC ,)(][ ][)( n
nznxzX −
∞
−∞=∑=
17
Digital Signal Processing, III, Zheng-Hua Tan, 200633
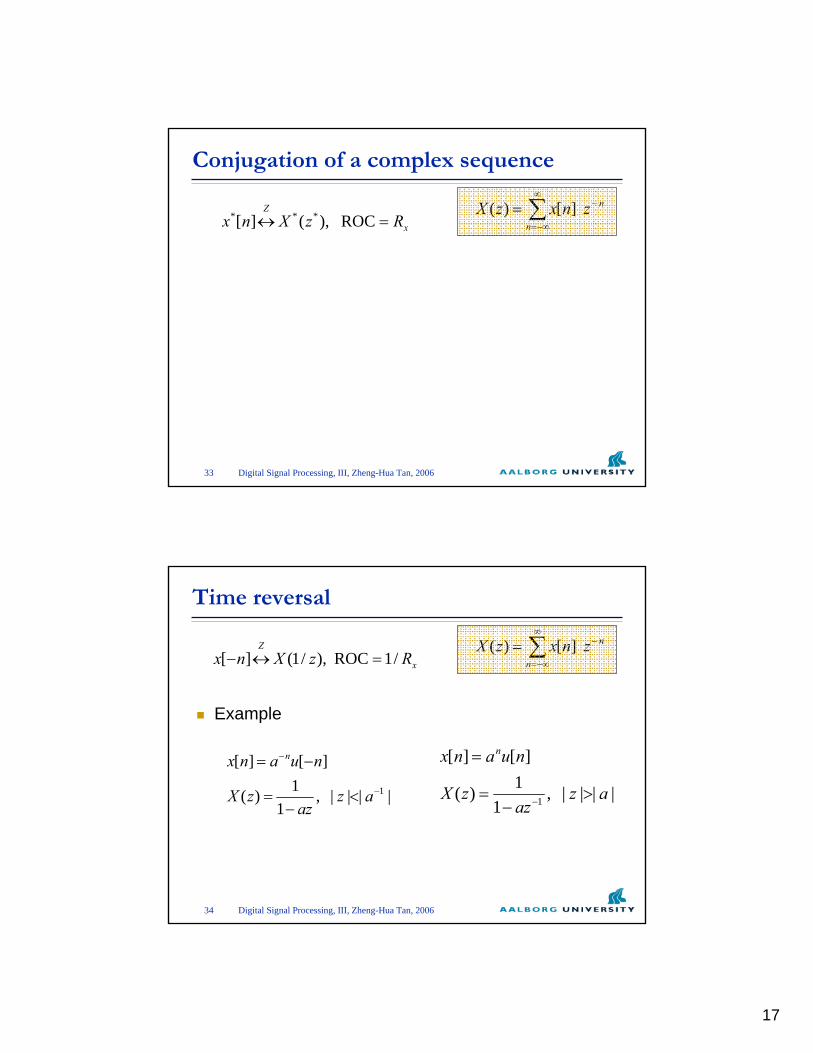
Conjugation of a complex sequence
x
ZRzXnx =↔ ROC ),(][ *** ][)( n
nznxzX −
∞
−∞=∑=
Digital Signal Processing, III, Zheng-Hua Tan, 200634
Time reversal
Example
|||| ,1
1)(
][][
1−
−
<−
=
−=
azaz
zX
nuanx n
x
ZRzXnx /1ROC ),/1(][ =↔−
][)( n
nznxzX −
∞
−∞=∑=
|||| ,1
1)(
][][
1 azaz
zX
nuanx n
>−
=
=
−
18
Digital Signal Processing, III, Zheng-Hua Tan, 200635
Convolution of sequences
Example
?][][][
][)21(][
nynunh
nunx n
=
=
21 contains ROC
),()(][*][ 2121
xx
Z
RRzXzXnxnx
∩↔ ][)( n
nznxzX −
∞
−∞=∑=
))
211(21
)1(1(
211
1
21|| ,
)1)(211(
1)(
1|| ,1
1)(
21|| ,
211
1)(
11
11
1
1
−−
−−
−
−
−−
−−=
>−−
=
>−
=
>−
=
zz
zzz
zY
zz
zH
zz
zX
])[)21(][(
211
1][ 1 nununy n+−−
=
Digital Signal Processing, III, Zheng-Hua Tan, 200636
Initial-value theorem
)(lim]0[ zXxz ∞→
= ][)( n
nznxzX −
∞
−∞=∑=
x[0]
lim][
][lim)(lim
=
=
=
−
∞→
∞
−∞=
−∞
−∞=∞→∞→
∑
∑n
zn
n
nzz
znx
znxzX
19
Digital Signal Processing, III, Zheng-Hua Tan, 200637
Properties of z-transform
Digital Signal Processing, III, Zheng-Hua Tan, 200638
Summary
z-transformProperties of the ROC Inverse z-transformProperties of z-transform
20
Digital Signal Processing, III, Zheng-Hua Tan, 200639
















![ECE-V-DIGITAL SIGNAL PROCESSING [10EC52] …vtusolution.in/.../digital-signal-processing-10ec52.pdfDigital vtusolution.in Signal Processing 10EC52 TEXT BOOK: 1. DIGITAL SIGNAL PROCESSING](https://static.documents.pub/doc/80x56/5afe42bb7f8b9a256b8ccd2e/ece-v-digital-signal-processing-10ec52-signal-processing-10ec52-text-book.jpg)








