Direct reconstruction method for wavelet transform extrema representation A.W.C. Liew N.F. Law D.T. Nguyen Indexing terms: Information theory, Wavelet transform Abstract: In contrast to the iterative reconstruction algorithm of projections onto convex sets (Mallat and coworkers, 1992; Liew and Nguyen, 1995; Cvetkovic and Vetterli, 1995) a noniterative method that completely solves the problem of reconstructing from the wavelet transform extrema representation is presented for the first time. The solution obtained by the proposed method is mathematically consistent and is indistinguishable from the true solution, i.e. both give the same representation. The proposed method consists of first finding a least- squares solution in the space spanned by the wavelet sampling bases. An orthogonal component that is to be added to the least- squares solution to form a consistent solution is then found by solving a set of linear inequalities specified by the a priori information in the representation using the linear programming technique. Numerical results presented show that the reconstructions are of good quality. 1 Introduction Singularities and irregular structures in a signal often carry important information from an information theo- retic point of view. Typical examples are radar signals and electrocardiograms where interesting information is given by transient phenomena such as peaks. In images, these sharp variation points provide the loca- tion of edges used for describing object boundaries that delimit the object from its environment. In particular, the contour sketches of an object at different scales or resolutions have been conjectured by Marr as being the basic representation furnished by our biological visual system [l-31. The wavelet transform modulus maxima representa- tion and the wavelet transform zero-crossing represen- 0 IEE, 1997 IEE Proceedings online no. 19971044 Paper first received 13th May and in revised form 15th November 1996 A.W.C. Liew was with the University of Tasmania and is now with the Department of System Engineering and Engineering Management, The Chinese University of Hong Kong, Shatin, NT, Hong Kong N.F. Law was with the University of Tasmania and is now with the Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong D.T. Nguyen is with the Department of Electrical and Electronic Engineering, University of Tasmania, GPO Box 252C, Hobart, 7001, Australia tation proposed by Mallat [4-61 can provide a multiscale contour representation of a signal. These representations are based on irregular sampling of the continuous dyadic scale wavelet transform at points which correspond to singularities or edges in the signal. Until recently, the uniqueness issue of such represen- tations has only been investigated empirically. An itera- tive scheme involving projection onto constraint sets has yielded good reconstruction results [4, 5, 7-91. Nev- ertheless, counterexamples were found in [lo, 111 that proved that the representations are not unique in gen- eral. Recently, Liew [12] relates the uniqueness issue to the completeness of the wavelet sampling bases in the signal subspace and gives a necessary and sufficient condition for the wavelet transform modulus maxima representation to be unique. The uniqueness analysis also yields a least-squares optimum reconstruction. The least-squares solution, however, does not utilise all the a priori information in the representation and thus may not be a consistent solution to the reconstruction prob- lem. Two solutions are consistent and mathematically equivalent if they give the same representation. The nonconvexity of the wavelet transform modulus maxima representation makes it difficult to utilise all the a priori information to get a consistent reconstruc- tion. On the other hand, the wavelet transform extrema representation is convex. In this paper, we demonstrate how all the a priori information in the wavelet trans- form extrema representation can be incorporated into the reconstruction using mathematical programming to give a consistent reconstruction. By incorporating an extra piece of information, namely the locations of the local minima, into the wavelet transform modulus maxima representation, we show that it is then possible to use our method to obtain a consistent reconstruc- tion. A discussion on how to handle the nonconvex wavelet transform modulus maxima representation will also be given. 2 Uniqueness and least-squares reconstruction Let the sampling set If with elements {ak> be defined for a particular signalf, where {ak} corresponds to the positions of the extrema of the dyadic wavelet trans- form of the signal. The wavelet transform extrema rep- resentation, fWTextrema, is then defined as the projection of the signal f onto the set of dyadic scale wavelet sam- pling bases { q, Jnk j JEZ,n!&lf where +J,nk(t) = 2-9(2-J(t - ylk)). A signal can be uniquely reconstructed from its wavelet transform extrema representation if the set { qj,nk}jEZ,nEq is com- fWTeztrema = { < f > '$j,nk >}jtZ,nk €If (1) 193 IEE Proc.-Vis. Image Signal Process., Vol. 144, No. 4, August 1997
Transcript
Direct reconstruction method for wavelet transform extrema representation
A.W.C. Liew N.F. Law D.T. Nguyen
Indexing terms: Information theory, Wavelet transform
Abstract: In contrast to the iterative reconstruction algorithm of projections onto convex sets (Mallat and coworkers, 1992; Liew and Nguyen, 1995; Cvetkovic and Vetterli, 1995) a noniterative method that completely solves the problem of reconstructing from the wavelet transform extrema representation is presented for the first time. The solution obtained by the proposed method is mathematically consistent and is indistinguishable from the true solution, i.e. both give the same representation. The proposed method consists of first finding a least- squares solution in the space spanned by the wavelet sampling bases. An orthogonal component that is to be added to the least- squares solution to form a consistent solution is then found by solving a set of linear inequalities specified by the a priori information in the representation using the linear programming technique. Numerical results presented show that the reconstructions are of good quality.
1 Introduction
Singularities and irregular structures in a signal often carry important information from an information theo- retic point of view. Typical examples are radar signals and electrocardiograms where interesting information is given by transient phenomena such as peaks. In images, these sharp variation points provide the loca- tion of edges used for describing object boundaries that delimit the object from its environment. In particular, the contour sketches of an object at different scales or resolutions have been conjectured by Marr as being the basic representation furnished by our biological visual system [l-31.
The wavelet transform modulus maxima representa- tion and the wavelet transform zero-crossing represen- 0 IEE, 1997 IEE Proceedings online no. 19971044 Paper first received 13th May and in revised form 15th November 1996 A.W.C. Liew was with the University of Tasmania and is now with the Department of System Engineering and Engineering Management, The Chinese University of Hong Kong, Shatin, NT, Hong Kong N.F. Law was with the University of Tasmania and is now with the Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong D.T. Nguyen is with the Department of Electrical and Electronic Engineering, University of Tasmania, GPO Box 252C, Hobart, 7001, Australia
tation proposed by Mallat [4-61 can provide a multiscale contour representation of a signal. These representations are based on irregular sampling of the continuous dyadic scale wavelet transform at points which correspond to singularities or edges in the signal.
Until recently, the uniqueness issue of such represen- tations has only been investigated empirically. An itera- tive scheme involving projection onto constraint sets has yielded good reconstruction results [4, 5, 7-91. Nev- ertheless, counterexamples were found in [lo, 111 that proved that the representations are not unique in gen- eral. Recently, Liew [12] relates the uniqueness issue to the completeness of the wavelet sampling bases in the signal subspace and gives a necessary and sufficient condition for the wavelet transform modulus maxima representation to be unique. The uniqueness analysis also yields a least-squares optimum reconstruction. The least-squares solution, however, does not utilise all the a priori information in the representation and thus may not be a consistent solution to the reconstruction prob- lem. Two solutions are consistent and mathematically equivalent if they give the same representation.
The nonconvexity of the wavelet transform modulus maxima representation makes it difficult to utilise all the a priori information to get a consistent reconstruc- tion. On the other hand, the wavelet transform extrema representation is convex. In this paper, we demonstrate how all the a priori information in the wavelet trans- form extrema representation can be incorporated into the reconstruction using mathematical programming to give a consistent reconstruction. By incorporating an extra piece of information, namely the locations of the local minima, into the wavelet transform modulus maxima representation, we show that it is then possible to use our method to obtain a consistent reconstruc- tion. A discussion on how to handle the nonconvex wavelet transform modulus maxima representation will also be given.
2 Uniqueness and least-squares reconstruction
Let the sampling set If with elements {ak> be defined for a particular signalf, where {ak} corresponds to the positions of the extrema of the dyadic wavelet trans- form of the signal. The wavelet transform extrema rep- resentation, fWTextrema, is then defined as the projection of the signal f onto the set of dyadic scale wavelet sam- pling bases { q , J n k j JEZ,n!&lf
where +J,nk(t) = 2-9(2-J(t - ylk)). A signal can be uniquely reconstructed from its wavelet transform extrema representation if the set { qj,nk}jEZ,nEq is com-
f W T e z t r e m a = { < f > '$j ,nk >}jtZ,nk € I f (1)
193 IEE Proc.-Vis. Image Signal Process., Vol. 144, No. 4, August 1997
plete in the signal subspace 7-t. A necessary and suffi- cient condition [ 121 for unique reconstruction is that {qj,nk} constitutes a frame in l-t, i.e. for all f E 'H, there exist two constants A, B > 0, A 5 B < 00 such that
j E Z n k € I Note that a wavelet transform extrema representation that is unique offers no overall data compression since at least N independent extrema points are needed to describe an N-point signal. Moreover, the a priori con- straints in the representation are redundant when the representation is unique.
Let M be the operator defined by M f = {< f,$'ll,nk > k Z , n i , E I (3)
and &f be the operator defined by
3 nk for any set of coefficients a = {a,,,,) E F. When { T ) ~ , ~ ~ ) constitutes a frame in 'H, A4* is called the adjoint of M and defines a mapping from 12 to 7-t. For a unique rep- resentation, the composite operator S = M*M defines a bijective mapping from l-t onto itself and the inverse operator S' exists such that the signal can be uniquely reconstructed from its wavelet transform extrema rep- resentation by
f = (S-%*M)f (5) A more interesting case is when the representation is nonunique. For this case, the information encoded in the wavelet transform extrema points does not describe the signal completely and exact reconstruction from the wavelet transform extrema representation is not possi- ble. Instead, a least-squares optimum reconstruction [12] can be obtained.
Let H I = linearspan{qj,,,}. Clearly, H , C H. Let H2 be the orthogonal complement of Hl in H such that H = H I 0 H2. Since any element in H2 is orthogonal to H I , the operator M maps any element in H2 to the zero sequence. Consider a function f E H and decompose f into
f = f l + f 2
wheref, is the orthogonal projection off onto H I and f2 is the orthogonal projection off onto H2. Under the mapping M ,
and the j 2 component is lost and cannot be recovered. The least-squares reconstruction problem can now be stated as:
Given the projection ML find an element that is closest to f in L2 norm among all elements in HI.
A solution g is least-squares optimum if the error e = f - g satisfies the normal equation,
Clearly, the only element in NI that satisfies the normal equation is fl. Hence, the least-squares reconstruction problem is equivalent to the recovery of the orthogonal projection off onto the subspace spanned by { qJ,nk}.
For the nonunique case, the composite operator S defines a mapping from H onto a smaller subspace HI. Since this mapping is surjective, the inverse operator S' does not exist. Let us define a generalised inverse operator 3-l with the property that for any function g
M f = Mfl (7 )
< e ,g >= 0 (8)
E H1
P s g = g (9)
This generalised inverse operator will produce a least- squares optimum solution from the projection Mf by
In practice, the generalised inverse of S can be found by performing singular value decomposition (SVD) [13] on the matrix representation of S. Using the same sym- bol S for the matrix representing the operator S, the SVD of the matrix S is given by
where U, V are square orthonormal matrices and A is a square diagonal matrix with positive or zero diagonal elements Ay SVD explicitly constructs orthonormal bases for the null space H2 of S and the range Hl of S if the matrix S is singular. The columns of U whose same-numbered elements Aj are nonzero are an orthon- ormal set of basis vectors that span the range; the col- umns of V whose same-numbered elements Aj are zero are an orthonormal basis for the null space. If S is nonsingular, all diagonal elements of A are positive and the inverse S' is given by
where A-' is a diagonal matrix with diagonal elements given by l/Aj. If S is singular, then some of the diago- nal elements of A are zero and the generalised inverse matrix S-' of S is given by
S-%*Mf = f l (10)
S = UAVT (11)
S-l = VA-lUT (12)
where A* is a diagonal matrix with diagonal elements A:. given by
To show that the generalised inverse ,!-I defined in eqn. 13 does give a least-squares solution to the recon- struction problem when the representation is not unique, we first show that, for any vector g E H I , eqn. 9 is satisQed. Let g' E H I 0 H2 (g' not unique) such that g = S-'Sg'; then we have
S P S g = (S-lS)(S-lS)g/ = (VA*AVT)(VA*AVT)g/ = V A * A A * A V ~ ~ / = VA*AV*~ '
= 9 (15) which proves eqn. 9. We next show that eqn. 8 is satis- fied by the generalised inverse S-' as we& Let e = f - g be the reconstruction error and let K = S-lS; we have
< e ,g > =< f - g ,g 3
=< f , g > - < 9 , g > =< f , K f > - < K f , K f > =< f , K f > - < f , K * K f > = 0 (16)
since K*K = K, where K* is the adjoint of K and is equivalent to the conjugate transpose of the matrix K.
3
Without any a priori information about the representa- tion, the least-squares solution is the best solution to the signal reconstruction problem. Since we are sam- pling the extrema of the wavelet transform of a signal, the sequence between a maximum (minimum) followed by a minimum (maximum) must be nonincreasing
incorporating the a priori information
IEE Proc -Vis Image Signal Process, Vol 144, No 4, August 1997 194
(nondecreasing) at every resolution in the wavelet domain up to the highest resolution. If the least- squares solution f i satisfies the a priori constraint, then it is a consistent solution and we have solved the recon- struction problem. Otherwise, the a priori knowledge can be used to define a feasible set S’ in H2 such that the sum of any element in the feasible set andJ; satis- fies the a priori constraint and constitutes a consistent solution. Note that the feasible set S, necessarily con- tains more than one element since the representation is nonunique in this case. If the representation is unique, then S’ would contain only the zero sequence. Also, all elements in the feasible set are equally likely candidates for the reconstruction. Although it is possible to specify a unique element in the feasible set by requiring that the final solution be of minimum norm, this cannot be justified as the true solution is not necessarily the mini- mum n9rm solution.
Let f =f i + h, where h E S’, be our consistent solu- tion to the nonunique reconstruction problem. The problem of finding h can be formulated as a mathemat- ical programming problem as shown below. Since we are considering the nonunique case, the null space H2 of the operator S is not trivial. The SVD of the matrix S will gives a set of orthonormal vectors {e,} spanning the null space H2 [13]. The problem of finding an ele- ment h in the feasible set now becomes that of finding a set of coefficients {a,} such that the element h is given by
1
h = anen (17) n= 1
where I is the dimension of the null space H2. Let (pa/,, vi) and (pi, v i ) , where p7 denotes the position and v‘ denotes the magnitude of the extrema, be a wavelet transform maximum and a wavelet transform mini- mum, respectively, of the wavelet transform extrema representation o f f a i the resolution 2J. Clearly, the wavelet transform o f f at scale 2J satisfies
W&4) = u: W 2 3 f (d) = (18)
since Mf = Mfi = Mf by construction. Furthermore, the a priori constraint in the representation requires that
Wz3f(&+i) I Wz3f(P:+z-l), 15 2 I (pi-pja) (19) which implies
1
anw23 ( e n ( d + 2) - en@ + .z - 1))
i K 3 ( . f l ( & + Z - 1) - fl(& + 4) n=l
(20 ) for 1 5 i 5 (pi - p i ) . The a priori constraint thus pro- duces a set of linear inequalities (eqn. 20) in which the unknown coefficients {a,} can be solved using mathe- matical programming technique. Note that the con- verse case where (pd, v i ) is a wavelet transform minimum and (pbJ, v6J) is a wavelet transform maximum can be treated similarly and will not be repeated here.
We now consider the wavelet transform modulus maxima representation and assume that the locations of the minima arc known. The inclusion of the minima points has been demonstrated experimentally to have increased the total number of points by only -10% [9]. The increase in the amount of data to be stored is even less when only the positions but not the values of the minima are kept. For this representation, we need to
IEE Proc -VIS Image Signal Process Vol 144 No 4 Auguyt 1997
differentiate between two cases: (i) when two adjacent wavelet transform modulus maxima are of opposite sign and (ii) when two adjacent wavelet transform modulus maxima are of the same sign. The constraint in case (i) is exactly the same as that in the wavelet transform extrema representation discussed above. We therefore consider case (ii) where both wavelet trans- form modulus maxima are of the same sign. Let (pf, v)) and (pi, vi) be two adjacent wavelet transform modulus maxima off at scale 2’ with the same sign, say both positive, and let pmJ be the location of the mini- mum in between them. Clearly, we have the following constraints that need to be satisfied by f if it is to be a consistent solution to the reconstruction problem:
W23fW =
w23 f(p3 , ) = v i (21)
W23f̂ (127C+4 I ~ z , f ( p 3 , + i - l ) , 15 i I (&d) ( 2 2 )
W23f^(P& + 2) 2 W23f^(P$ + i - l), 1 I 2 I (4 -&) ( 2 3 )
W , 3 f ( p i + i ) > 0 , 15Z5(pi-d-l) (24) Note that eqn. 21 is automatically satisfied by regardless of what {a,} is. On the other hand, eqns. 22- 24 come from the a priori constraint in the representa- tion and imply the following inequalities from which we can solve for {a,}:
1 anW23 (en(p3c + i ) - en(& + - 1)) 1
n=l
I Wz3 + 2 - 1) - f ( & + 41, 1 I I ($A - &I (25)
1
an~2j(en(gm + 2) - en(pk + - 1)) n=l
2 WZJ (?($ + - 1) - fx(P!A + 41, 1 I i I ( P i - PL) (26)
C ~ n ~ ; 1 e n ( p ; ’ + + ) > - j ( & + i ) , 1 ~ i 1 ( P : - & - I )
(27) If the location of the minimum Pmj is not known as in the usual wavelet transform modulus maxima represeq- tation, then eqns. 22 and 23 cannot be applied to f . Instead, a set of less restrictive constraints is used, i.e.
and
1
n=l
W 2 3 . f ( & + i ) I U: , 1 I i i (p”, -$ - 2 )
WZjf(l4 - 1) 5 ui (28 ) which translate to
1
anw2jen(d + i) i - ~ 2 , f”<d + i ) n=l
1 I 2 I (p”, - d - 2) (29)
(30 )
It should be pointed out that the nonconvex constraint of requiring that there can only be one minimum (max- imum) between two adjacent positive (negative) maxima has not been applied. I f f is to be a consistent solution, it also needs to satisfy that nonconvex con- straint. However, since the location of the minimum is
and 1
a n ~ 2 3 e n ( p j , - 1) i u i - w,j.f(& - 1) n= 1
195
not known, application of the nonconvex constraint into the reconstruction is difficult. If the nonconvex constraint is to be applied to the reconstruction, then the location of the minimum has to be guessed subject to the condition that other constraints defined earlier are satisfied as well. In many cases, we found that the solution obtained is good enough even without this nonconvex constraint.
Two mathematical programming techniques that can be used to solve for h E S' given the set of linear ine- qualities that specified the a priori constraints are the linear programming (LP) method and the quadratic programming (QP) method [14]. The LP method can be used when the objective function to be minimised is linear. A possible choice of the linear objective function is
1
01 = an (31) n=l
The LP method is simple to use and can be solved very efficiently using the simplex method. When the objec- tive function is quadratic, for example,
1
n= 1 the QP method has to be used. The objective function of eqn. 32 corresponds to requiring that h has the smallest L2 norm amongst all element in S' However, the QP problem is much more expensive to solve than the LP problem. As all elements in Sf are equally likely candidates to the solution of the reconstruction prob- lem, there is really no basis to justify the use of 0, over that of Ob
I " " " ' I " " I
-0.5
-1.01 , 1 ' I , 1 , 1 , 1 1
0 10 20 30 LO 50 60 Fig. 1 64-point signal
4 Numerical results
We present some numerical results on the reconstruc- tion of a signal from its wavelet transform extrema and wavelet transform modulus maxima representations. The LP method with the objective function Ol defined in eqn. 31 is used to impose the a priori constraints onto the reconstruction. The signal is shown in Fig. 1 and its three-level dyadic wavelet decomposition using the quadratic spline wavelet [4, 51 is shown in Fig. 2. The impulses in Fig. 2 are the wavelet transform extrema representation of the signal of Fig. 1. Note that the lowpass approximation S3 in Fig. 2 is being subsampled by a factor of 23. This is done due to the fact that the lowpass sequence has most of its spectral energy concentrated in a bandwidth that is approxi- mately eight times smaller than the bandwidth of the original signal. Fig. 3 shows the least-squares recon- struction of the signal from its wavelet transform
196
extrema representation. As can be seen, the least- squares solution is already very close to the true solu- tion. By applying the a priori constraints in the recon- struction, we obtained the reconstructed signal shown in Fig. 4. The result clearly shows an improvement on the least-squares solution. The reconstruction incorpo- rating the a priori information is almost indistinguisha- ble from the true solution.
2 1 ' 7-7
1 . 5 1 ' ' ' ' ' ' ' ' ' ' : ' i
-0 .5L ' ' ' ' ' ' ' ' I 0 10 20 30 LO 50 60
Fig. 2 sentation
Dyadic wavelet transform and wavelet transform extrema repre-
is the detail sequence at level j and S3 is the lowpass sequence
Least-squares a priori constrained reconstmetion )om wavelet
IEE Proc.-Vis. Image Signal Process., Vol. 144, No. 4, August 1997
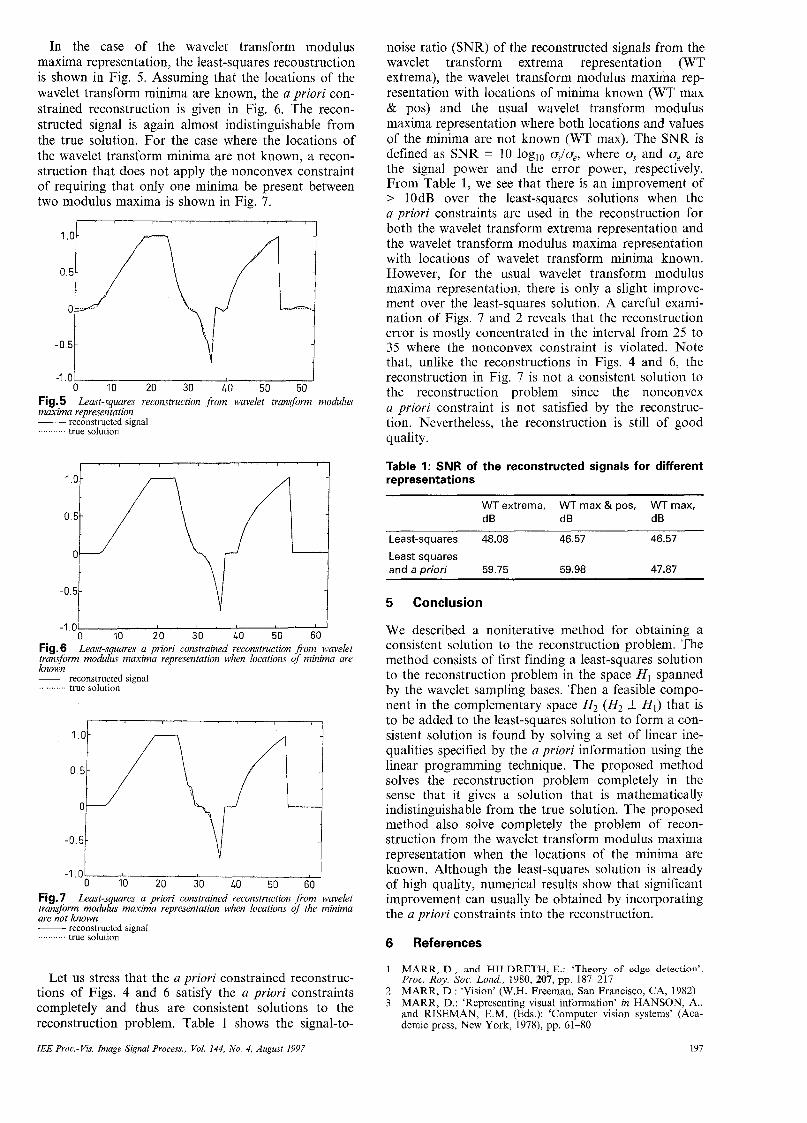
In the case of the wavelet transform modulus maxima representation, the least-squares reconstruction is shown in Fig. 5. Assuming that the locations of the wavelet transform minima are known, the a priori con- strained reconstruction is given in Fig. 6. The recon- structed signal is again almost indistinguishable from the true solution. For the case where the locations of the wavelet transform minima are not known, a recon- struction that does not apply the nonconvex constraint of requiring that only one minima be present between two modulus maxima is shown in Fig. 7.
I " " " " " " I
-1.01 . , 0 10 20 30 LO 50 60
Fig. 5 maxima representation __ reconstructed signal ........... true solution
Least-squares reconstruction from wavelet transform modulus
I " ' I ' " ' I ' I I
0 10 20 30 LO 50 60 Fig. 6 Least-s uares a priori constrained reconstruction )om wavelet transform modu& maxima representation when locations of minima are known - reconstructed signal ........... true solution
I " " " " " ' t i
-0 5 -
-1.01 " ' I , ' , I , 1 . # I 0 10 20 30 LO 50 60
Fig. 7 Least-s wres a priori constrained reconstruction )om wavelet trmsfom mo&& "a representation when locations of the minima are not known - reconstructed signal ........... true solution
Let us stress that the a priori constrained reconstruc- tions of Figs. 4 and 6 satisfy the a priori constraints completely and thus are consistent solutions to the reconstruction problem. Table I shows the signal-to-
IEE Proc.-Vis. Image Signal Process.. Vol. 144, No. 4, August 1997
noise ratio (SNR) of the reconstructed signals from the wavelet transform extrema representation (WT extrema), the wavelet transform modulus maxima rep- resentation with locations of minima known (WT max & pos) and the usual wavelet transform modulus maxima representation where both locations and values of the minima are not known (WT max). The SNR is defined as SNR = 10 loglo osla,, where os and o, are the signal power and the error power, respectively. From Table 1, we see that there is an improvement of > lOdB over the least-squares solutions when the a priori constraints are used in the reconstruction for both the wavelet transform extrema representation and the wavelet transform modulus maxima representation with locations of wavelet transform minima known. However, for the usual wavelet transform modulus maxima representation, there is only a slight improve- ment over the least-squares solution. A careful exami- nation of Figs. 7 and 2 reveals that the reconstruction error is mostly concentrated in the interval from 25 to 35 where the nonconvex constraint is violated. Note that, unlike the reconstructions in Figs. 4 and 6, the reconstruction in Fig. 7 is not a consistent solution to the reconstruction problem since the nonconvex a priori constraint is not satisfied by the reconstruc- tion. Nevertheless, the reconstruction is still of good quality.
Table 1: SNR of the reconstructed signals for different representations
WT extrema, WT max & pos, WT max, dB dB dB
Least-squares 48.08 46.57 46.57
Least-squares and a priori 59.75 59.98 47.87
5 Conclusion
We described a noniterative method for obtaining a consistent solution to the reconstruction problem. The method consists of first finding a least-squares solution to the reconstruction problem in the space H I spanned by the wavelet sampling bases. Then a feasible compo- nent in the complementary space H2 (H2 L H I ) that is to be added to the least-squares solution to form a con- sistent solution is found by solving a set of linear ine- qualities specified by the a priori information using the linear programming technique. The proposed method solves the reconstruction problem completely in the sense that it gives a solution that is mathematically indistinguishable from the true solution. The proposed method also solve completely the problem of recon- struction from the wavelet transform modulus maxima representation when the locations of the minima are known. Although the least-squares solution is already of high quality, numerical results show that significant improvement can usually be obtained by incorporating the a priori constraints into the reconstruction.
6 References
1 MARR, D., and HILDRETH, E.: 'Theory of edge detection', Proc. Roy. Soc. Lond., 1980, 207, pp. 187-217
2 MARR, D.: 'Vision' (W.H. Freeman, San Francisco, CA, 1982) 3 MARR, D.: 'Representing visual information' in HANSON, A.,
and RISEMAN, E.M. (Eds.): 'Computer vision systems' (Aca- demic press, New York, 1978), pp. 61-80
197
4 MALLAT, S., and ZHONG, S.: ‘Characterisation of signals from multiscale edges’, IEEE Trans. Pattern Anal. Mach. Intell., 1992,
MALLAT, S., and HWANG, W.L.: ‘Singularity detection and processing with wavelets’, IEEE Trans. In$ Theory, 1992, 38, (2), pp. 617-643
6 MALLAT. S.: ‘Zero-crossings of a wavelet transform’. IEEE
14, (7), pp. 710-732 5
Trans. Ifij’Theory, 1991, 37,74), pp. 1019-1033 LIEW, A., and NGUYEN, D.T.: ‘Reconstruction from wavelet 7 transform modulus maxima using nonexpansive projections’, Electron. Lett., 1995, 31, (13), pp. 1038-1039
8 LIEW, A., and NGUYEN, D.T.: ‘Signal reconstruction from the wavelet transform modulus maxima’. Proceedings of the Third Australian and New Zealand Conference on Intelligent informa- tion systems, Perth, Western Australia, 27-29 Nov. 1995
9 CVETKOVIC, Z., and VETTERLI, M.: ‘Discrete-time wavelet extrema representation: Design and consistent reconstruction’, IEEE Trans. Signal Process., 1995, 43, (3)
10 MEYER, Y.: ‘Ondelettes et applications’. Ceremade et Institute Universitaire de France, 1992
11 BERMAN, Z., and BARAS, J.S.: ‘Properties of the multiscale maxima and zero-crossings representation’, IEEE Trans. Signal Process., 1993, 41, (12), pp. 3216-3231
12 LIEW, A., and NGUYEN, D.T.: ‘Uniqueness issue of the wave- let transform modulus maxima representation and a least square reconstruction algorithm’, Electron. Lett., 1995, 31, (20), pp. 1735-1736
13 PRESS, W.H., TEUKOLSKY, S.A., VETTERLING, W.T., and FLANNERY, B.P.: ‘Numerical recipes in C: the art of scientific computing’ (Cambridge University Press, 1992, 2nd edn.)
14 HARTLEY, R.: ‘Linear and nonlinear programming: an intro- duction to linear methods in mathematical programming’ (John Wiley & Son, Chichester, 1985), Ellis Horwood series: mathemat- ics and applications
198 IEE Proc.-Vis Image Signal Pvocess., Vol. 144, No. 4, August 1997