Universidad Distrital Francisco José de Caldas Página 1 de 52 Juliette Sánchez, Erika Niño DISEÑO DE UNA INTERFAZ LABVIEW Y ARDUINO E IMPLEMENTACIÓN DE UN PROGRAMA APLICADO A LA MÁQUINA DE VACÍO DEL LABORATORIO DE MECÁNICA Design of an interface LabVIEW and Arduino and implementation of an applied program to the Máquina de vacío of Mechanical Laboratory Resumen Actualmente, existen muchas herramientas que facilitan las aplicaciones de control que se manejan en la industria para que se lleve a cabo un proceso; sin embargo, algunas de ellas pueden resultar económicamente desfavorables. El presente documento tiene como fin dar a conocer un manual de instrucciones, cuyo contenido permita interpretar de manera sencilla, cada uno de los elementos utilizados para el desarrollo de una interfaz entre el micro-controlador Arduino y el software LabVIEW, que pueda reemplazar aquellas herramientas que no son accesibles para prácticas exclusivamente académicas e inclusive para aplicaciones industriales sencillas de programación para controlar maquinaria y equipos. Esta interfaz permitirá que la Máquina de vacío FESTO ubicada en el Laboratorio de Mecánica de la Universidad Distrital Francisco José de Caldas – Facultad Tecnológica, mediante un programa implementado en primera instancia en lenguaje ladder y modificado a compuertas lógicas para obtener resultados booleanos, es decir, obtener 1 o 0 según sea el caso y poder ejecutarse en LabVIEW, cumpla una etapa de verificación de sus elementos y una etapa de simulación de producción bajo ciertos parámetros establecidos en el desarrollo de la programación. Gracias a esta interfaz, los estudiantes tendrán una experiencia agradable con el software, ya que al ser gráfico, se podrá observar la activación y desactivación de los sensores y las electroválvulas que comprende la máquina, de igual forma se podrá controlar los tiempos de los temporizadores en la etapa de verificación. Adicionalmente, se explicará la conexión que fue necesaria para lograr que, tanto las señales de entrada como las señales de salida del Arduino funcionaran
Transcript
Universidad Distrital Francisco José de Caldas
Página 1 de 52
Juliette Sánchez, Erika Niño
DISEÑO DE UNA INTERFAZ LABVIEW Y ARDUINO E IMPLEMENTACIÓN DE
UN PROGRAMA APLICADO A LA MÁQUINA DE VACÍO DEL LABORATORIO
DE MECÁNICA
Design of an interface LabVIEW and Arduino and implementation of an
applied program to the Máquina de vacío of Mechanical Laboratory
Resumen
Actualmente, existen muchas herramientas que facilitan las aplicaciones de control que se
manejan en la industria para que se lleve a cabo un proceso; sin embargo, algunas de ellas
pueden resultar económicamente desfavorables.
El presente documento tiene como fin dar a conocer un manual de instrucciones, cuyo
contenido permita interpretar de manera sencilla, cada uno de los elementos utilizados para
el desarrollo de una interfaz entre el micro-controlador Arduino y el software LabVIEW, que
pueda reemplazar aquellas herramientas que no son accesibles para prácticas
exclusivamente académicas e inclusive para aplicaciones industriales sencillas de
programación para controlar maquinaria y equipos.
Esta interfaz permitirá que la Máquina de vacío FESTO ubicada en el Laboratorio de
Mecánica de la Universidad Distrital Francisco José de Caldas – Facultad Tecnológica,
mediante un programa implementado en primera instancia en lenguaje ladder y modificado
a compuertas lógicas para obtener resultados booleanos, es decir, obtener 1 o 0 según sea
el caso y poder ejecutarse en LabVIEW, cumpla una etapa de verificación de sus elementos
y una etapa de simulación de producción bajo ciertos parámetros establecidos en el
desarrollo de la programación. Gracias a esta interfaz, los estudiantes tendrán una
experiencia agradable con el software, ya que al ser gráfico, se podrá observar la activación
y desactivación de los sensores y las electroválvulas que comprende la máquina, de igual
forma se podrá controlar los tiempos de los temporizadores en la etapa de verificación.
Adicionalmente, se explicará la conexión que fue necesaria para lograr que, tanto las
señales de entrada como las señales de salida del Arduino funcionaran
Universidad Distrital Francisco José de Caldas
Página 2 de 52
adecuadamente y así lograr la comunicación requerida en esta estrategia de control para
procesos de automatización.
En el desarrollo del proyecto, fue indispensable hacer una adecuación del panel de
conexiones de la Máquina de vacío, para obtener una mejor distribución de las mismas, lo
que permitió disminuir tiempo y lograr una conexión más eficiente de la máquina.
Abstract Currently, there are many tools that facilitate the control applications that are handled in the industry so that a process is carried out; however, some of them may be economically unfavorable. The purpose of this document is to present an instructions manual, whose content allows to interpret in a simple manner, each of the elements used for the development of an interface between the Arduino microcontroller and LabVIEW software, which can replace those tools that are not accessible for exclusively academic practices and even for simple industrial programming applications to control machinery and equipment.
This interface will allow the Máquina de vacío FESTO located in the Mechanical Laboratory of the Francisco José de Caldas District University - Technology Faculty, through a program implemented in the first instance in ladder language and modified to logic floodgates to obtain Boolean results, that is, obtain 1 or 0 as the case may be and be able to run in LabVIEW, complete a stage of verification of its elements and a stage of production simulation under certain parameters established in the development of the programming. Thanks to this interface, the students will have a pleasant experience with the software, since the graphic being, it will be possible to observe the activation and deactivation of the sensors and the electrovalves that the machine comprises, in the same way it will be possible to control the times of the timers in the verification stage.
Additionally, the connection that was necessary to ensure that both the input signals and the output signals of the Arduino will work properly and thus achieve the communication required in this control strategy for automation processes will be explained.
In the development of the project, it was essential to make an adaptation of the connection panel of the Máquina de vacío, to obtain a better distribution of the same, which allowed to reduce time and achieve a more efficient connection of the machine.
El auge en los procesos de la industria logró el desarrollo de técnicas de control que
permitieron incrementar la producción y disminuir los tiempos de fabricación de los
productos de las grandes empresas, no obstante, todas estas aplicaciones resultan ser
costosas para proyectos de pequeña dimensión, es por esto, que este proyecto se
encaminó en la búsqueda de alternativas más accesibles y de fácil manejo, para sustituir
este tipo de tecnología, como lo es el uso de PLC’s, con el diseño de una interfaz que sea
capaz de realizar un proceso similar y adicionalmente se tenga una interacción hombre –
máquina al poder controlar desde un software el funcionamiento de un mecanismo que no
sea tan robusto, en el caso de esta investigación el elemento de prueba fue la Máquina de
vacío FESTO del Laboratorio de Mecánica de la Universidad Distrital Francisco José de
Caldas - Facultad Tecnológica.
Esta máquina consta de 10 sensores inductivos y cinco electroválvulas alimentados cada
uno a 24VDC y cinco actuadores, los cuales permiten transportar un disco desde el
dispensador hasta la zona de troquelado, donde se realiza un troquel de 3 segundos y luego
continúa hacia la zona de ventosa y retorna de nuevo al dispensador. Teniendo en cuenta
el funcionamiento del brazo neumático FESTO, se diseñó un programa que cumpliera con
estas condiciones, además de una etapa de verificación, un reset que permita finalizar el
proceso y un paro de emergencia que apague todo el sistema en cualquier momento.
La construcción del programa se realizó en el software LabVIEW, que es un sistema de
programación gráfica usado para desarrollar simulaciones, pruebas y control, utilizando
compuertas lógicas, temporizadores al trabajo y al reposo, entre otros.
Por su parte, la interfaz se realizó con LabVIEW y el micro-controlador Arduino con la cual
se logró conseguir que lo programado en el software se viera reflejado en los pines de
entrada y salida del Arduino MEGA, comprobado mediante una prueba piloto que se realizó,
utilizando leds y pulsadores.
2. Marco Teórico
Los retos que afrontan las industrias para satisfacer el mercado, se han venido
incrementando notablemente en los últimos tiempos y de manera similar las demandas de
los sistemas de control de procesos, con el fin de crear producciones más eficientes y con
los mínimos errores posibles.
Es por esto que la automatización de procesos se ha vuelto una herramienta fundamental
para facilitar procesos, mejorar costos, servicio y calidad. La automatización tiene ventajas
significativas en los procesos industriales, el trabajo es más rápido y no se necesita de una
cantidad determinada de trabajadores que antes eran necesarios para la realización de un
proceso. Además los problemas de calidad se reducen considerablemente ya que el trabajo
se desarrolla de una manera más uniforme debido a las especificaciones dadas al
automatismo. [1]
Universidad Distrital Francisco José de Caldas
Página 5 de 52
En el proceso de automatización, es necesario realizar un análisis del proceso al cual se le
quiere aplicar el automatismo, buscar elementos adecuados para realizarlo, estudiar los
costos, realizar la correcta instalación y verificar su funcionamiento.
Para el desarrollo de la interfaz, se utilizará el micro-controlador Arduino MEGA, el cual será
el elemento de conexión física entre LabVIEW y la Máquina de vacío FESTO del Laboratorio
de Mecánica, es decir, se diseñará en LabVIEW el código que cumpla con las condiciones
de la secuencia y éste a su vez enviará la información a través de la placa a los sensores
del brazo neumático y estos actuarán de acuerdo a los parámetros establecidos, de igual
manera funciona el proceso con las electroválvulas, pero en este caso la activación de las
electroválvulas se leerá en la placa y esta envía la información al programa de LabVIEW
donde se ejecutarán las instrucciones programadas.
2.1 Arduino
Arduino es un entorno de prototipos electrónicos que se fundamentan en hardware (placa)
y software flexibles y de fácil interpretación. Además, requiere de un lenguaje de
programación Processing/Wiring para poder ser utilizado, programado y configurado a una
o varias necesidades, lo que permite una mejor interacción entre el usuario y el computador.
[2]
Por lo que se puede decir que Arduino es una herramienta "completa" ya que sólo se
necesita instalar y configurar el lenguaje de programación establecido para éste micro
controlador, haciéndola una herramienta de aprendizaje en el ámbito del diseño de
procesos electrónicos-automáticos. Gracias a sus entradas análogas y digitales Arduino
permite interactuar con diferentes elementos electrónicos como sensores, actuadores y
motores. [2]
Es por esto que se decidió aplicarlo para este proyecto, haciendo uso de sus salidas
digitales con el fin de obtener un 1 o 0, que determinarán la apertura o cierre de un contacto,
y se verá reflejado físicamente con la activación o desactivación de sensores de proximidad.
En la Figura 1 se puede observar una placa de Arduino MEGA.
Figura 1. Tarjeta Arduino MEGA
Fuente: Arduino. https://store.arduino.cc/usa/
Universidad Distrital Francisco José de Caldas
Página 6 de 52
2.2 LabVIEW
LabVIEW (Laboratory Virtual Instrument Engineering Workbench) es un ambiente para
el desarrollo de aplicaciones de propósito general que permite controlar dispositivos y
realizar análisis de datos. También utiliza un lenguaje de programación gráfica llamado
lenguaje G, el cual a través de diagramas de bloques brinda una solución gráfica a
un problema de programación. [3]
Este software permite visualizar resultados mediante interfaces de usuario de “clic-y-
arrastre” y visualizadores de datos integrados. Este software garantiza la compatibilidad
con otras herramientas ya que puede interactuar o reutilizar bibliotecas de otro software y
lenguajes de fuente abierta como Arduino. [3]
LabVIEW cuenta con dos interfaces: panel frontal y diagrama de bloques. Estas cuentan
con paletas que contienen los objetos necesarios para implementar y desarrollar tareas.
2.3 Módulo de LabVIEW Real-Time
El Módulo de LabVIEW Real-Time es una solución para crear sistemas integrados
confiables e independientes que funciona como complemento en el entorno de desarrollo
de LabVIEW, el cual ayuda a desarrollar y mejorar aplicaciones gráficas especificas en
tiempo real que pueden descargarse y ejecutarse en dispositivos. [4]
2.4 Toolkit VI Package Manager
VI Package Manager es un complemento de LabVIEW que permite la comunicación con
Arduino para el desarrollo de múltiples proyectos. Este complemento es una herramienta
fácil de usar que permite simplificar el desarrollo de procesos de ingeniería. [5]
La interfaz de LabVIEW con Arduino toolkit permite crear de forma rápida y fácil, interfaces
gráficas de usuario para cualquier componente que sea compatible con este micro
controlador. Este kit de herramientas de código libre permite a los usuarios crear
controladores personalizados para sus sensores. [6]
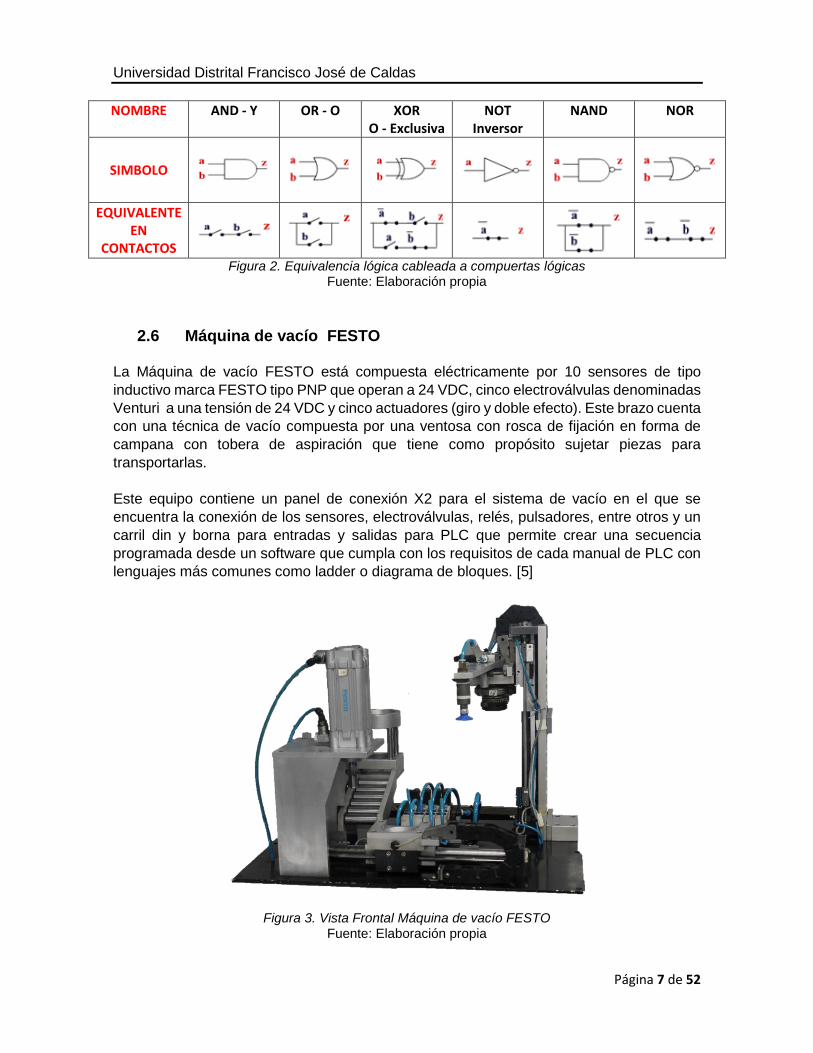
2.5 Equivalencia de lógica cableada a compuertas lógicas
La lógica cableada es una técnica aplicada para el diseño de pequeños a grandes
automatismos utilizados principalmente en las industrias, por su parte, las compuertas
lógicas son bloques que producen señales en binario con valores de 1 o 0 a su salida
dependiendo la operación aritmética de cada compuerta. A continuación se puede observar
la equivalencia de la lógica cableada a compuertas lógicas que permitirá el desarrollo de un
programa aplicado para lograr el movimiento y cumplimiento de una secuencia de la
máquina de vacío FESTO. [7]
Universidad Distrital Francisco José de Caldas
Página 7 de 52
NOMBRE AND - Y OR - O XOR O - Exclusiva
NOT Inversor
NAND NOR
SIMBOLO
EQUIVALENTE EN
CONTACTOS
Figura 2. Equivalencia lógica cableada a compuertas lógicas Fuente: Elaboración propia
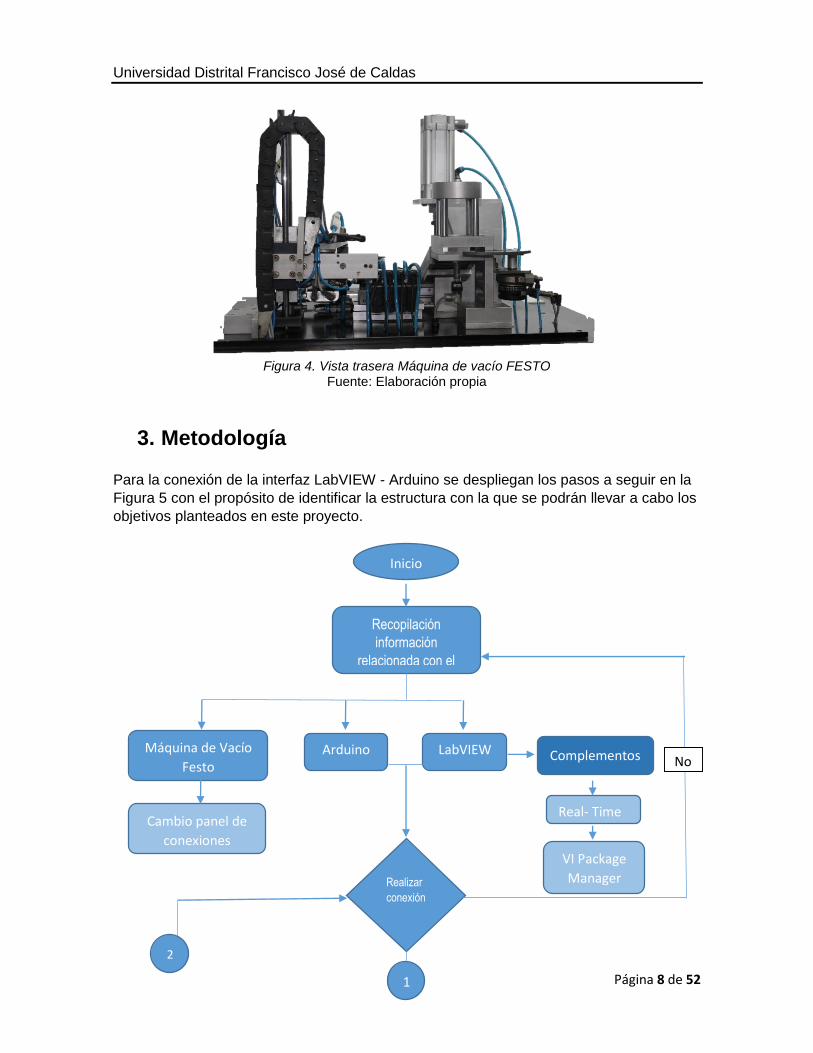
2.6 Máquina de vacío FESTO
La Máquina de vacío FESTO está compuesta eléctricamente por 10 sensores de tipo
inductivo marca FESTO tipo PNP que operan a 24 VDC, cinco electroválvulas denominadas
Venturi a una tensión de 24 VDC y cinco actuadores (giro y doble efecto). Este brazo cuenta
con una técnica de vacío compuesta por una ventosa con rosca de fijación en forma de
campana con tobera de aspiración que tiene como propósito sujetar piezas para
transportarlas.
Este equipo contiene un panel de conexión X2 para el sistema de vacío en el que se
encuentra la conexión de los sensores, electroválvulas, relés, pulsadores, entre otros y un
carril din y borna para entradas y salidas para PLC que permite crear una secuencia
programada desde un software que cumpla con los requisitos de cada manual de PLC con
lenguajes más comunes como ladder o diagrama de bloques. [5]
Figura 3. Vista Frontal Máquina de vacío FESTO Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 8 de 52
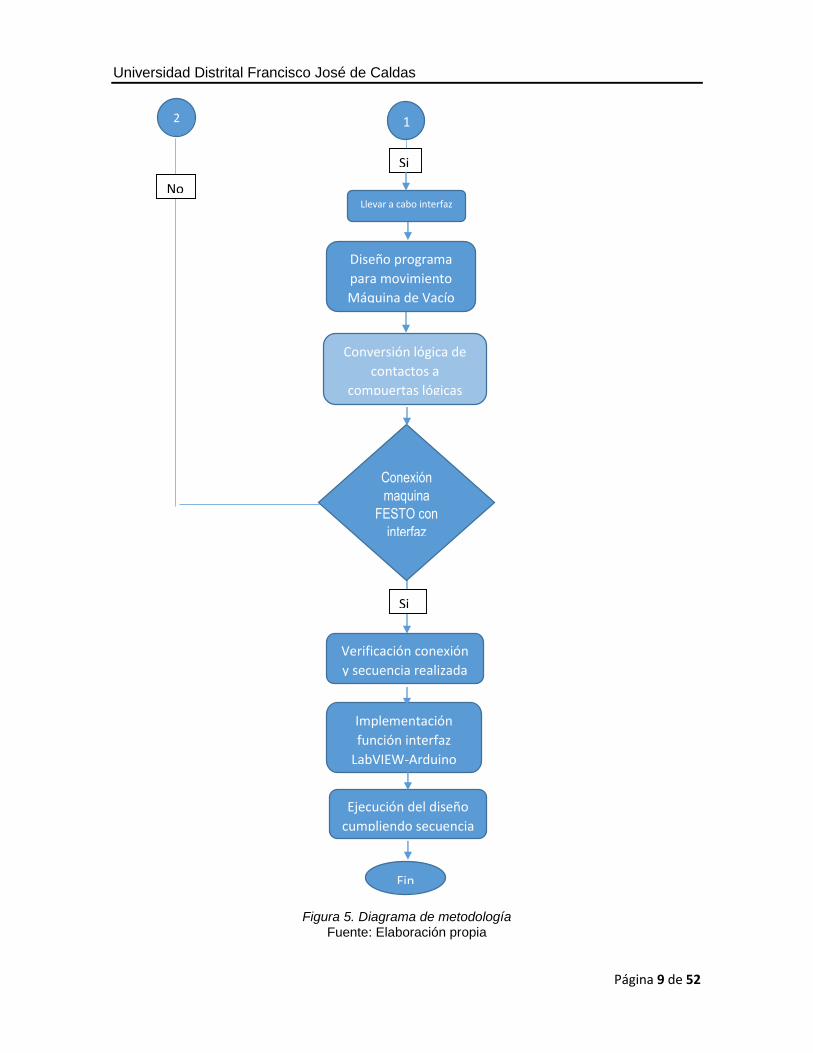
Figura 4. Vista trasera Máquina de vacío FESTO
Fuente: Elaboración propia
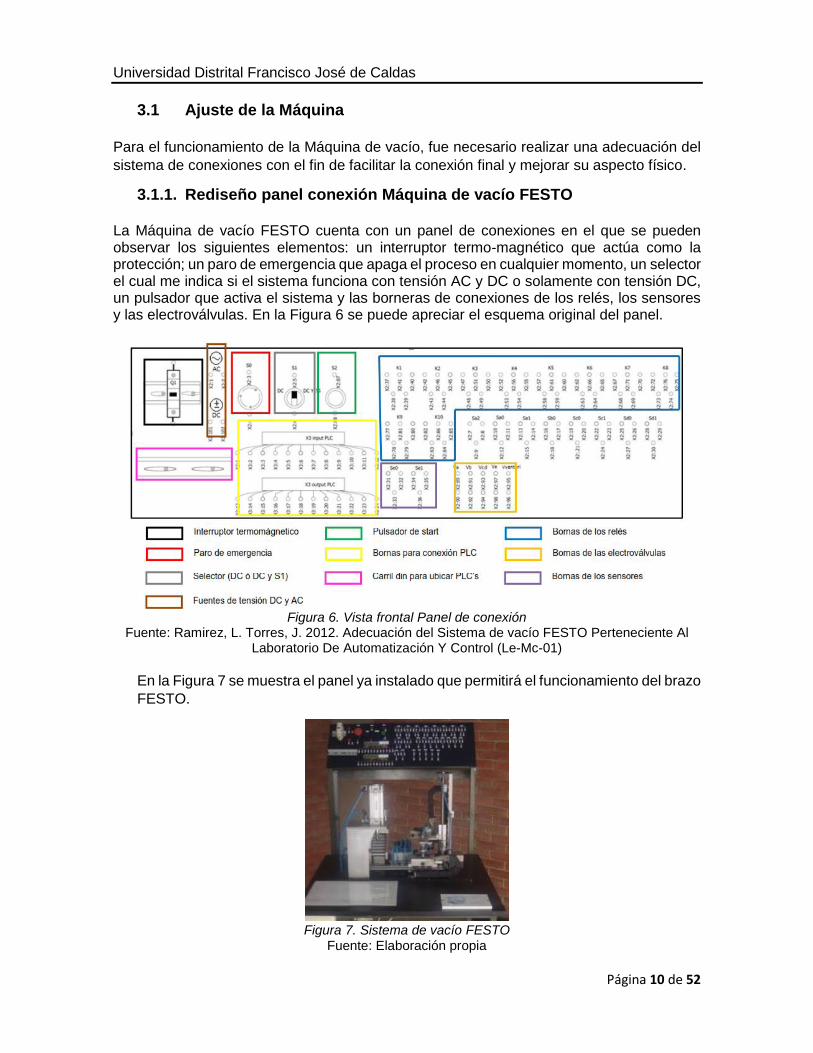
3. Metodología
Para la conexión de la interfaz LabVIEW - Arduino se despliegan los pasos a seguir en la
Figura 5 con el propósito de identificar la estructura con la que se podrán llevar a cabo los
objetivos planteados en este proyecto.
Inicio
Recopilación
información
relacionada con el
proyecto
LabVIEW Arduino Máquina de Vacío
Festo
Realizar
conexión
No Complementos
Real- Time
VI Package
Manager
Cambio panel de
conexiones
2
1
Universidad Distrital Francisco José de Caldas
Página 9 de 52
Figura 5. Diagrama de metodología Fuente: Elaboración propia
Si
Diseño programa
para movimiento
Máquina de Vacío
Festo
Conexión
maquina
FESTO con
interfaz
No
Si
1
Ejecución del diseño
cumpliendo secuencia
Implementación
función interfaz
LabVIEW-Arduino
Verificación conexión
y secuencia realizada
Fin
Llevar a cabo interfaz
Conversión lógica de
contactos a
compuertas lógicas
2
Universidad Distrital Francisco José de Caldas
Página 10 de 52
3.1 Ajuste de la Máquina
Para el funcionamiento de la Máquina de vacío, fue necesario realizar una adecuación del
sistema de conexiones con el fin de facilitar la conexión final y mejorar su aspecto físico.
3.1.1. Rediseño panel conexión Máquina de vacío FESTO La Máquina de vacío FESTO cuenta con un panel de conexiones en el que se pueden observar los siguientes elementos: un interruptor termo-magnético que actúa como la protección; un paro de emergencia que apaga el proceso en cualquier momento, un selector el cual me indica si el sistema funciona con tensión AC y DC o solamente con tensión DC, un pulsador que activa el sistema y las borneras de conexiones de los relés, los sensores y las electroválvulas. En la Figura 6 se puede apreciar el esquema original del panel.
Figura 6. Vista frontal Panel de conexión
Fuente: Ramirez, L. Torres, J. 2012. Adecuación del Sistema de vacío FESTO Perteneciente Al Laboratorio De Automatización Y Control (Le-Mc-01)
En la Figura 7 se muestra el panel ya instalado que permitirá el funcionamiento del brazo
FESTO.
Figura 7. Sistema de vacío FESTO
Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 11 de 52
El diseño de este panel se realizó para que las conexiones de alimentación, los relés, las electroválvulas y los sensores se hicieran en la parte frontal del mismo, sin embargo, no se tuvo en cuenta que esta conexión resulta ser demasiado dispendiosa y de bastante cuidado ya que al ajustar un conector en la bornera equivocada, no se logrará el movimiento de la máquina o en el peor de los casos, es posible dañarla. En la Figura 8 se observa la conexión final.
Figura 8. Conexión Máquina FESTO
Fuente: Elaboración propia
Por tal motivo, se llega a la conclusión de realizar un rediseño de este panel, que permita facilitar la conexión total de la Máquina de vacío. Este nuevo diseño dejó en la parte frontal al igual que en el anterior esquema; la protección termo-magnética, el selector de tres posiciones, el paro de emergencia y el pulsador, y se enfocó en simplificar la conexión de los relés, los sensores y las electroválvulas dejando únicamente las borneras de las salidas de los mismos, la alimentación de 24 VDC y de 120V y las entradas - salidas respectivas del sistema que también pueden ir conectadas a un PLC. En la Figura 9 se muestra el diseño final del panel de conexiones.
Figura 9. Rediseño Panel de conexiones Máquina FESTO
Fuente: Elaboración propia
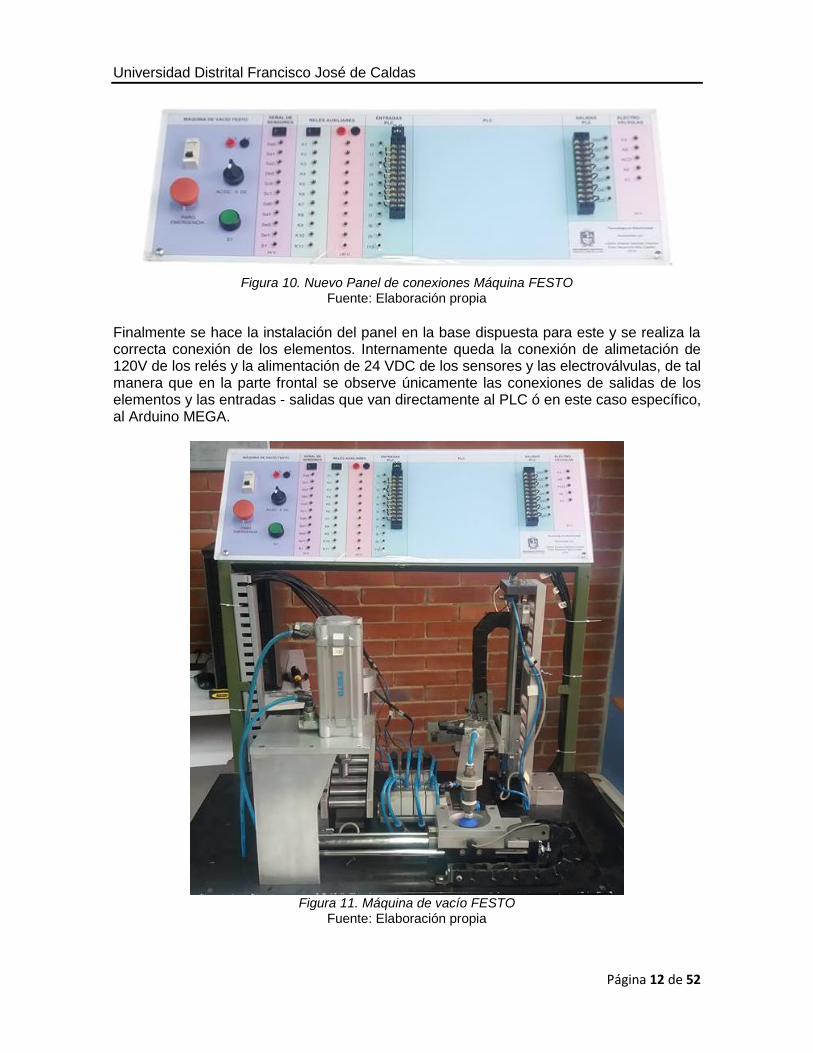
El esquema se imprimió en un acrílico de 5mm, en el cual se hizo la ubicación del interruptor termo-magnético, el paro de emergencia, el selector, el pulsador, los interruptores ON/OFF, las borneras de alimentación, las borneras de conexión y las regletas. El producto final se puede observar en la Figura 10 de acuerdo a lo plasmado en la Figura 9.
Universidad Distrital Francisco José de Caldas
Página 12 de 52
Figura 10. Nuevo Panel de conexiones Máquina FESTO
Fuente: Elaboración propia
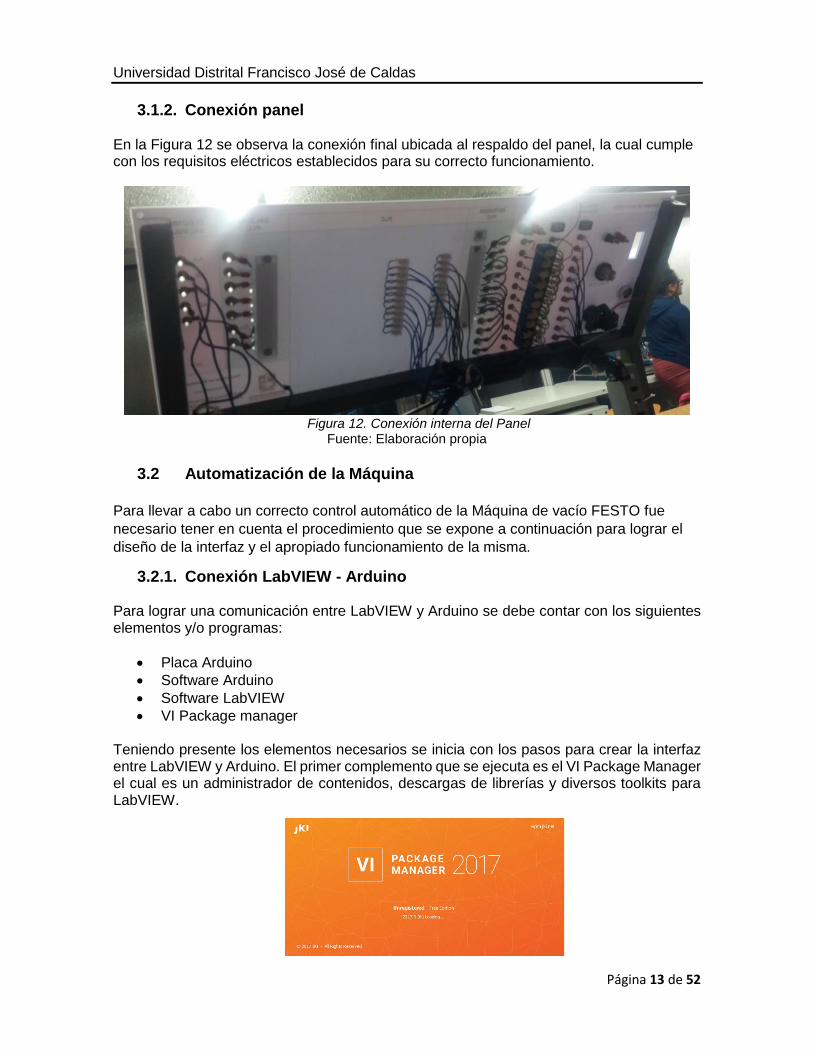
Finalmente se hace la instalación del panel en la base dispuesta para este y se realiza la correcta conexión de los elementos. Internamente queda la conexión de alimetación de 120V de los relés y la alimentación de 24 VDC de los sensores y las electroválvulas, de tal manera que en la parte frontal se observe únicamente las conexiones de salidas de los elementos y las entradas - salidas que van directamente al PLC ó en este caso específico, al Arduino MEGA.
Figura 11. Máquina de vacío FESTO
Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 13 de 52
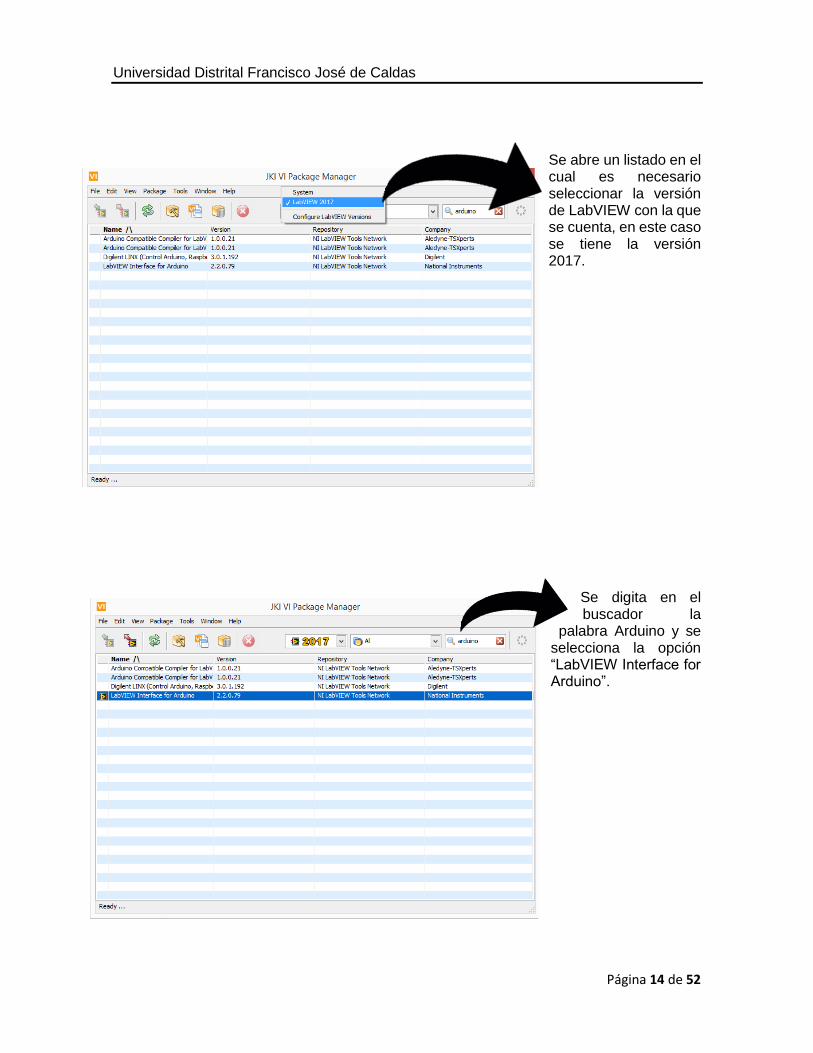
3.1.2. Conexión panel En la Figura 12 se observa la conexión final ubicada al respaldo del panel, la cual cumple con los requisitos eléctricos establecidos para su correcto funcionamiento.
Figura 12. Conexión interna del Panel
Fuente: Elaboración propia
3.2 Automatización de la Máquina
Para llevar a cabo un correcto control automático de la Máquina de vacío FESTO fue
necesario tener en cuenta el procedimiento que se expone a continuación para lograr el
diseño de la interfaz y el apropiado funcionamiento de la misma.
3.2.1. Conexión LabVIEW - Arduino Para lograr una comunicación entre LabVIEW y Arduino se debe contar con los siguientes elementos y/o programas:
Placa Arduino
Software Arduino
Software LabVIEW
VI Package manager Teniendo presente los elementos necesarios se inicia con los pasos para crear la interfaz entre LabVIEW y Arduino. El primer complemento que se ejecuta es el VI Package Manager el cual es un administrador de contenidos, descargas de librerías y diversos toolkits para LabVIEW.
Universidad Distrital Francisco José de Caldas
Página 14 de 52
Se abre un listado en el cual es necesario seleccionar la versión de LabVIEW con la que se cuenta, en este caso se tiene la versión 2017.
Se digita en el buscador la
palabra Arduino y se selecciona la opción “LabVIEW Interface for Arduino”.
Universidad Distrital Francisco José de Caldas
Página 15 de 52
Aparecerá la siguiente ventana en la cual se da click en la opción “Install” tal como se muestra en la Figura __. Este es el paquete que permitirá manipular la placa Arduino desde LabVIEW.
Una vez realizada la instalación de todos los programas que se requieren y mencionados como requisito, el siguiente paso será crear la conexión entre Arduino y LabVIEW, a continuación se muestra como ubicar el programa que se debe cargar a la tarjeta Arduino para poder manejarlo desde LabVIEW.
Se ejecuta el programa de Arduino, se dirige a la pestaña Archivo y se selecciona la opción abrir tal y como se muestra en la Figura.
Universidad Distrital Francisco José de Caldas
Página 16 de 52
Se selecciona Este equipo y luego Disco local (C:)
Se busca y se
ingresa a la carpeta Archivos de programa.
Universidad Distrital Francisco José de Caldas
Página 17 de 52
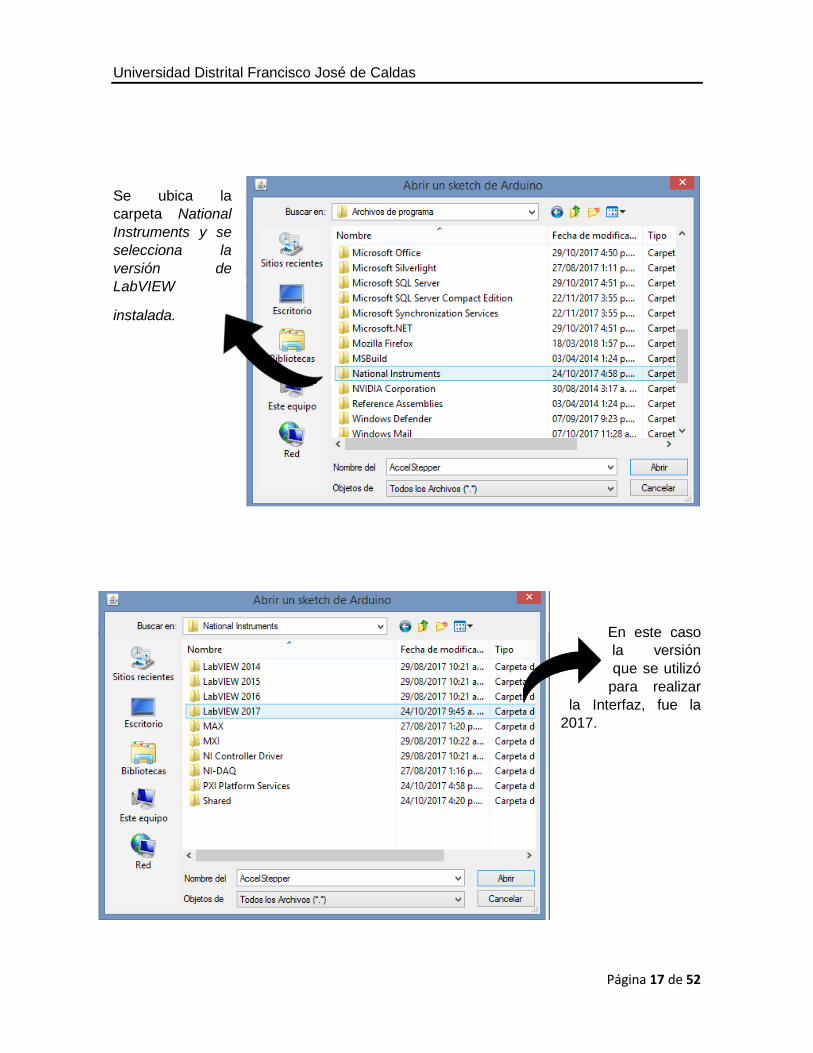
Se ubica la
carpeta National
Instruments y se
selecciona la
versión de
LabVIEW
instalada.
En este caso
la versión
que se utilizó
para realizar
la Interfaz, fue la
2017.
Universidad Distrital Francisco José de Caldas
Página 18 de 52
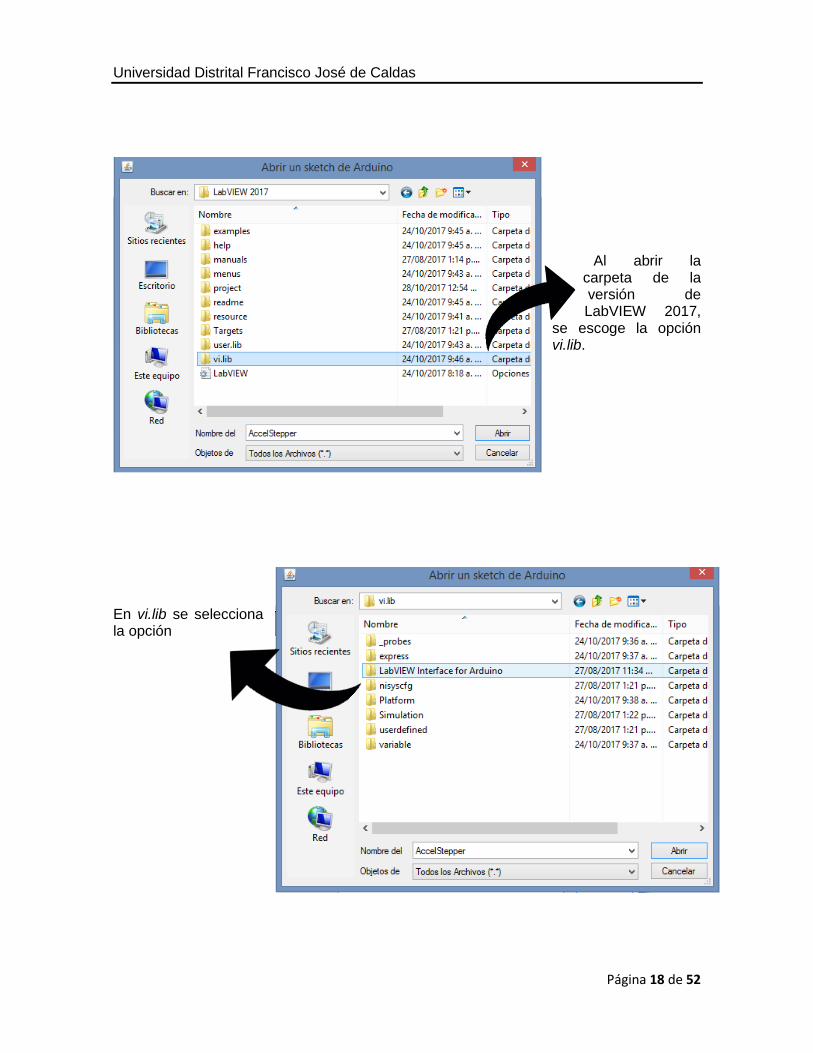
Al abrir la carpeta de la versión de LabVIEW 2017,
se escoge la opción vi.lib.
En vi.lib se selecciona la opción
Universidad Distrital Francisco José de Caldas
Página 19 de 52
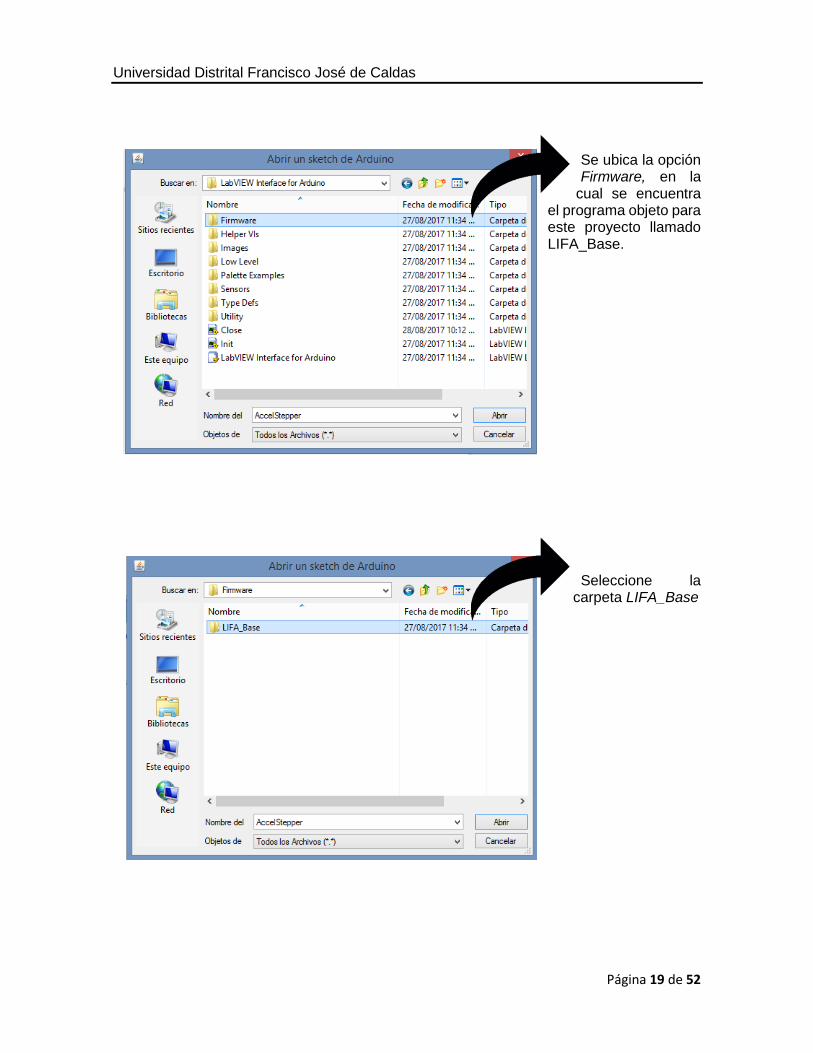
Se ubica la opción Firmware, en la
cual se encuentra el programa objeto para este proyecto llamado LIFA_Base.
Seleccione la
carpeta LIFA_Base
Universidad Distrital Francisco José de Caldas
Página 20 de 52
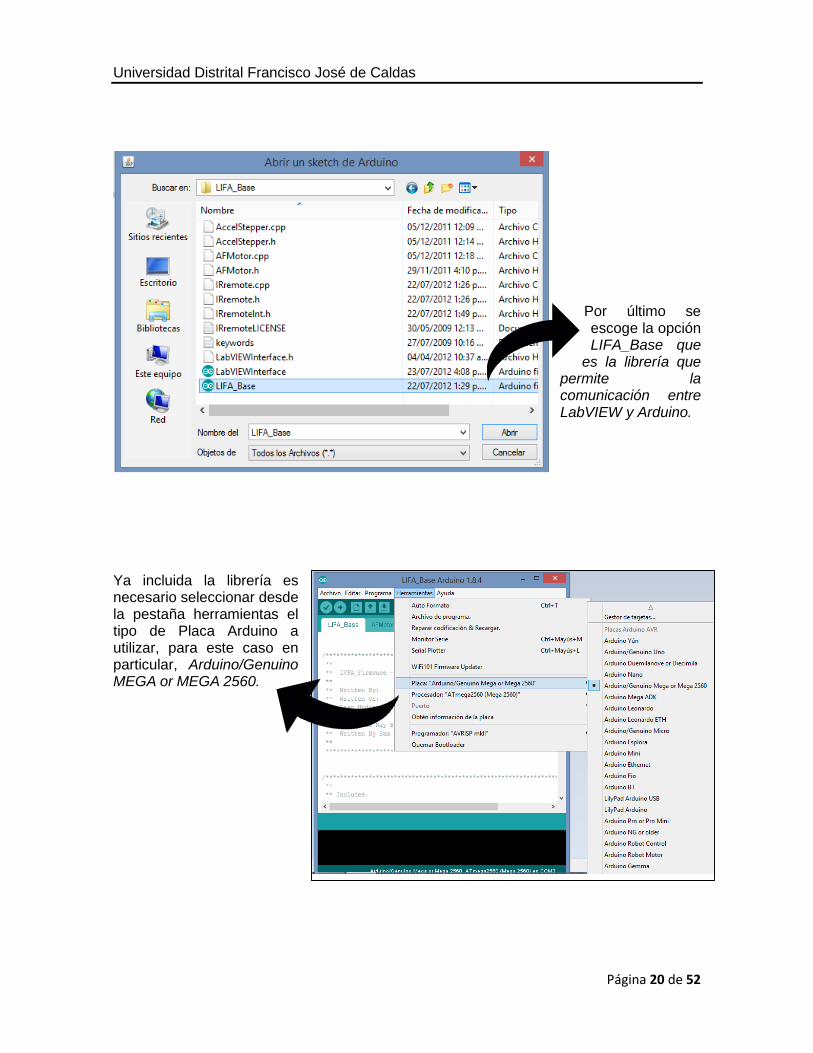
Por último se escoge la opción LIFA_Base que
es la librería que permite la comunicación entre LabVIEW y Arduino.
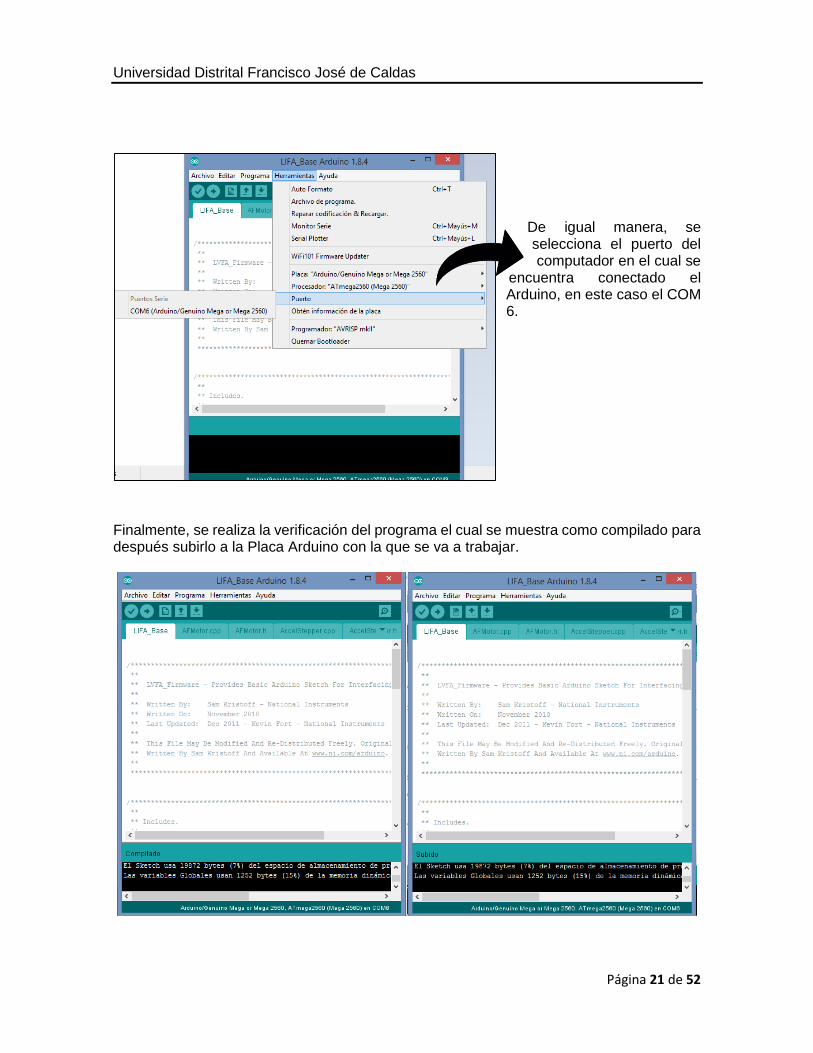
Ya incluida la librería es necesario seleccionar desde la pestaña herramientas el tipo de Placa Arduino a utilizar, para este caso en particular, Arduino/Genuino MEGA or MEGA 2560.
Universidad Distrital Francisco José de Caldas
Página 21 de 52
De igual manera, se selecciona el puerto del computador en el cual se
encuentra conectado el Arduino, en este caso el COM 6.
Finalmente, se realiza la verificación del programa el cual se muestra como compilado para después subirlo a la Placa Arduino con la que se va a trabajar.
Universidad Distrital Francisco José de Caldas
Página 22 de 52
Terminada la conexión y programación del Arduino, se continúa con la elaboración de la programación gráfica en LabVIEW. Se debe tener en cuenta que cada bloque del paquete de Arduino instalado en LabVIEW, representa una función igual al lenguaje de Arduino.
4. Diseño y construcción En esta sección se describen los elementos y bloques usados en la programación de la
máquina de Vacío FESTO que se encuentran en el panel frontal de LabVIEW y la
construcción del modelo lógico en la interfaz de LabVIEW - Arduino
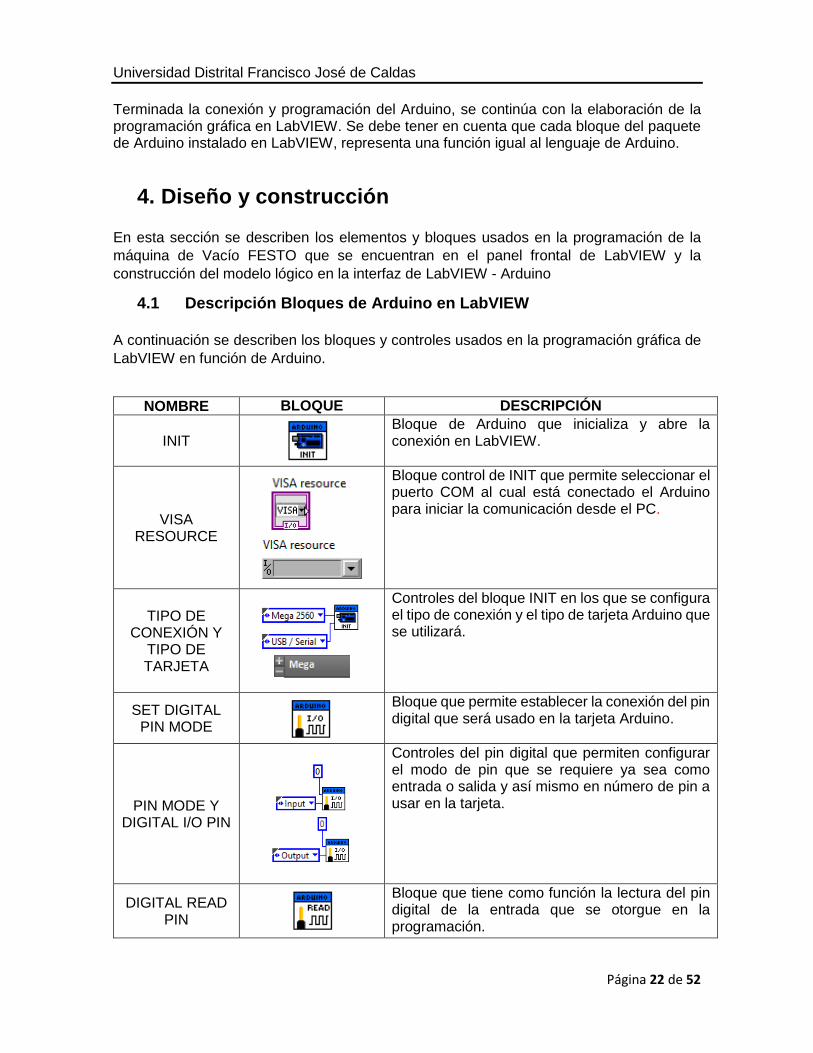
4.1 Descripción Bloques de Arduino en LabVIEW
A continuación se describen los bloques y controles usados en la programación gráfica de
LabVIEW en función de Arduino.
NOMBRE BLOQUE DESCRIPCIÓN
INIT
Bloque de Arduino que inicializa y abre la conexión en LabVIEW.
VISA RESOURCE
Bloque control de INIT que permite seleccionar el puerto COM al cual está conectado el Arduino para iniciar la comunicación desde el PC.
TIPO DE CONEXIÓN Y
TIPO DE TARJETA
Controles del bloque INIT en los que se configura el tipo de conexión y el tipo de tarjeta Arduino que se utilizará.
SET DIGITAL PIN MODE
Bloque que permite establecer la conexión del pin digital que será usado en la tarjeta Arduino.
PIN MODE Y DIGITAL I/O PIN
Controles del pin digital que permiten configurar el modo de pin que se requiere ya sea como entrada o salida y así mismo en número de pin a usar en la tarjeta.
DIGITAL READ PIN
Bloque que tiene como función la lectura del pin digital de la entrada que se otorgue en la programación.
Universidad Distrital Francisco José de Caldas
Página 23 de 52
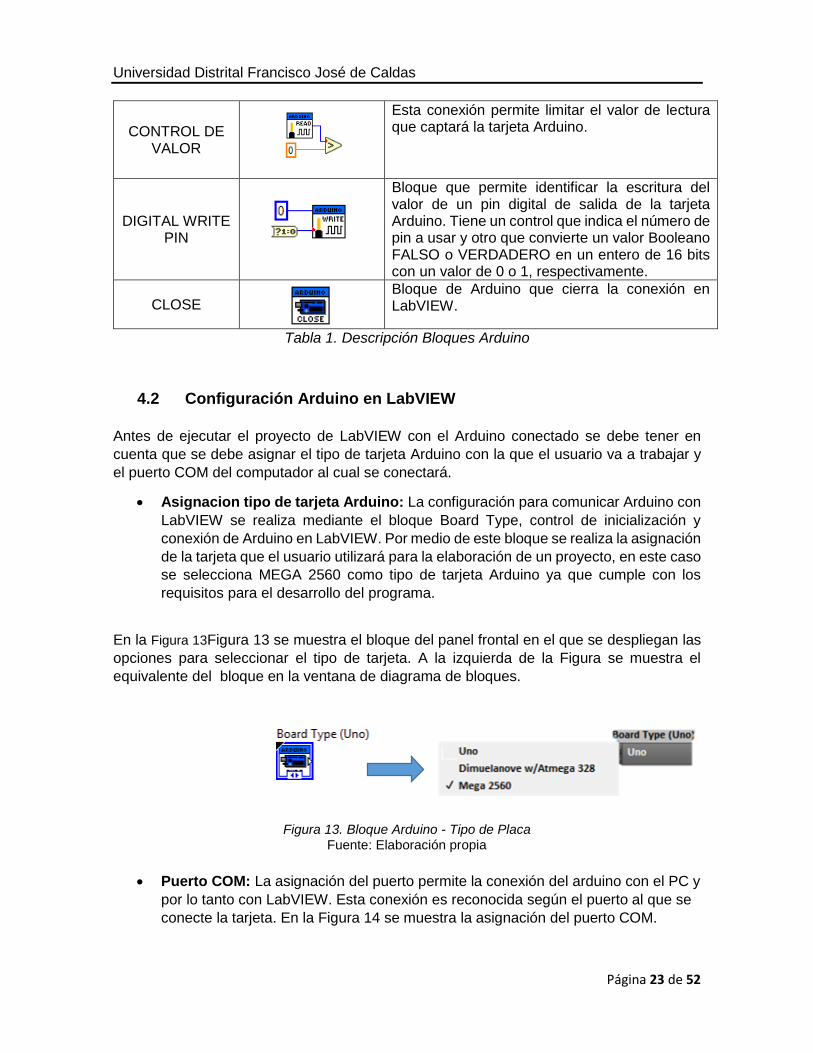
CONTROL DE VALOR
Esta conexión permite limitar el valor de lectura que captará la tarjeta Arduino.
DIGITAL WRITE PIN
Bloque que permite identificar la escritura del valor de un pin digital de salida de la tarjeta Arduino. Tiene un control que indica el número de pin a usar y otro que convierte un valor Booleano FALSO o VERDADERO en un entero de 16 bits con un valor de 0 o 1, respectivamente.
CLOSE
Bloque de Arduino que cierra la conexión en LabVIEW.
Tabla 1. Descripción Bloques Arduino
4.2 Configuración Arduino en LabVIEW
Antes de ejecutar el proyecto de LabVIEW con el Arduino conectado se debe tener en
cuenta que se debe asignar el tipo de tarjeta Arduino con la que el usuario va a trabajar y
el puerto COM del computador al cual se conectará.
Asignacion tipo de tarjeta Arduino: La configuración para comunicar Arduino con
LabVIEW se realiza mediante el bloque Board Type, control de inicialización y
conexión de Arduino en LabVIEW. Por medio de este bloque se realiza la asignación
de la tarjeta que el usuario utilizará para la elaboración de un proyecto, en este caso
se selecciona MEGA 2560 como tipo de tarjeta Arduino ya que cumple con los
requisitos para el desarrollo del programa.
En la Figura 13Figura 13 se muestra el bloque del panel frontal en el que se despliegan las
opciones para seleccionar el tipo de tarjeta. A la izquierda de la Figura se muestra el
equivalente del bloque en la ventana de diagrama de bloques.
Figura 13. Bloque Arduino - Tipo de Placa Fuente: Elaboración propia
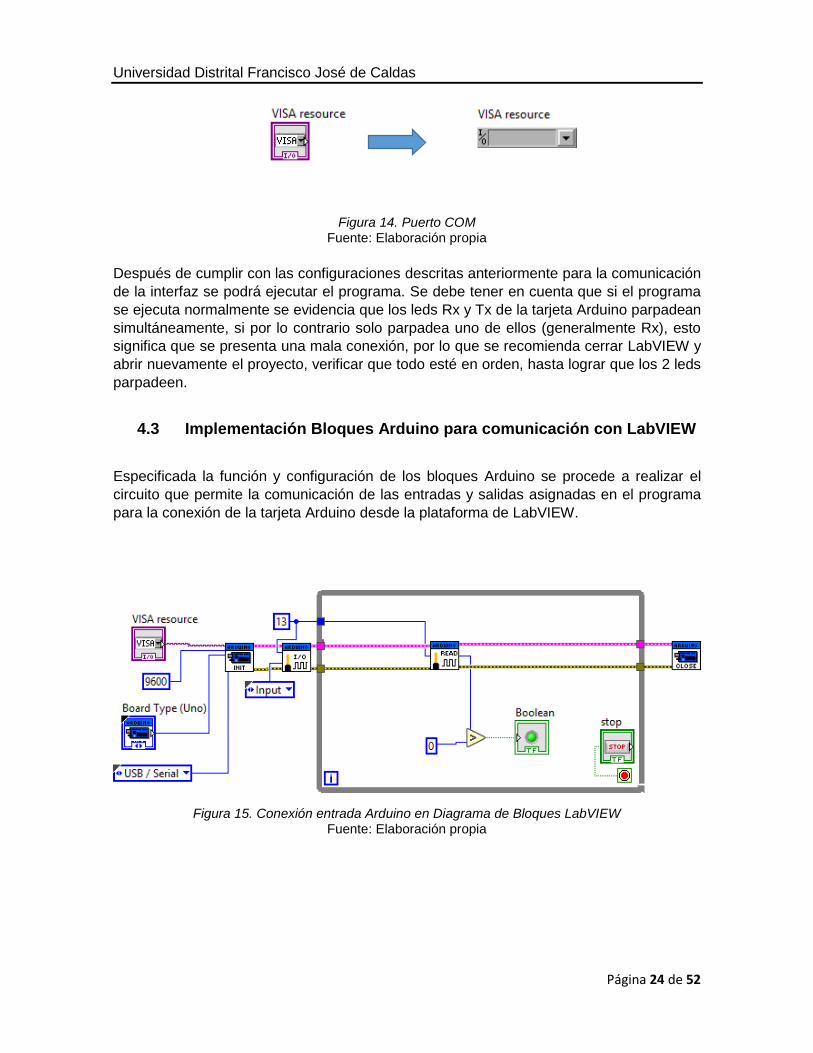
Puerto COM: La asignación del puerto permite la conexión del arduino con el PC y
por lo tanto con LabVIEW. Esta conexión es reconocida según el puerto al que se
conecte la tarjeta. En la Figura 14 se muestra la asignación del puerto COM.
Universidad Distrital Francisco José de Caldas
Página 24 de 52
Figura 14. Puerto COM Fuente: Elaboración propia
Después de cumplir con las configuraciones descritas anteriormente para la comunicación
de la interfaz se podrá ejecutar el programa. Se debe tener en cuenta que si el programa
se ejecuta normalmente se evidencia que los leds Rx y Tx de la tarjeta Arduino parpadean
simultáneamente, si por lo contrario solo parpadea uno de ellos (generalmente Rx), esto
significa que se presenta una mala conexión, por lo que se recomienda cerrar LabVIEW y
abrir nuevamente el proyecto, verificar que todo esté en orden, hasta lograr que los 2 leds
parpadeen.
4.3 Implementación Bloques Arduino para comunicación con LabVIEW
Especificada la función y configuración de los bloques Arduino se procede a realizar el
circuito que permite la comunicación de las entradas y salidas asignadas en el programa
para la conexión de la tarjeta Arduino desde la plataforma de LabVIEW.
Figura 15. Conexión entrada Arduino en Diagrama de Bloques LabVIEW Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 25 de 52
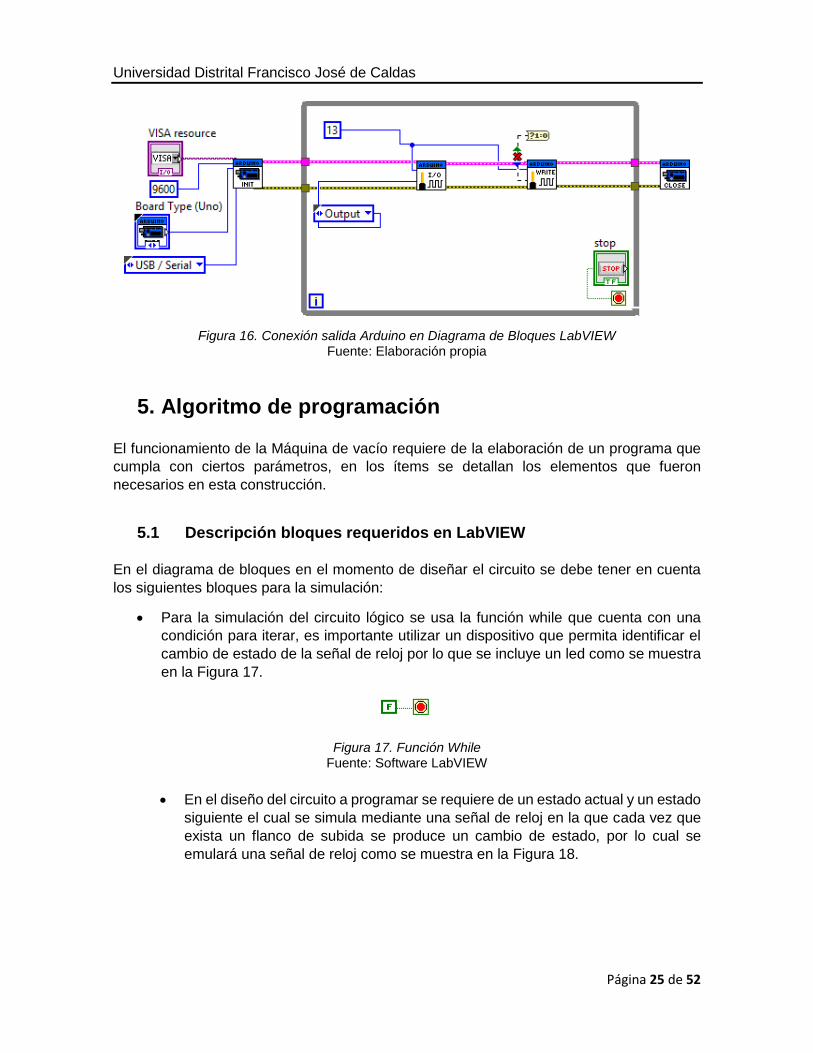
Figura 16. Conexión salida Arduino en Diagrama de Bloques LabVIEW Fuente: Elaboración propia
5. Algoritmo de programación
El funcionamiento de la Máquina de vacío requiere de la elaboración de un programa que
cumpla con ciertos parámetros, en los ítems se detallan los elementos que fueron
necesarios en esta construcción.
5.1 Descripción bloques requeridos en LabVIEW
En el diagrama de bloques en el momento de diseñar el circuito se debe tener en cuenta
los siguientes bloques para la simulación:
Para la simulación del circuito lógico se usa la función while que cuenta con una
condición para iterar, es importante utilizar un dispositivo que permita identificar el
cambio de estado de la señal de reloj por lo que se incluye un led como se muestra
en la Figura 17.
Figura 17. Función While Fuente: Software LabVIEW
En el diseño del circuito a programar se requiere de un estado actual y un estado
siguiente el cual se simula mediante una señal de reloj en la que cada vez que
exista un flanco de subida se produce un cambio de estado, por lo cual se
emulará una señal de reloj como se muestra en la Figura 18.
Universidad Distrital Francisco José de Caldas
Página 26 de 52
Figura 18. Señal de Reloj Fuente: Software LabVIEW
Circuito Flip Flop de dos estados que sirve para memorizar información y transferir
datos digitales en operaciones de lógica secuencial como la usada en la simulación
ya que se incluyen temporizadores. Ver Figura 19.
Figura 19. Flip Flop Fuente: Software LabVIEW
El siguiente complemento indica al circuito Flip Flop que cada 50 mili-segundos se
genera un cambio de flanco, como se ilustra en la Figura 20.
Figura 20. Cambio de flanco Fuente: Software LabVIEW
En la conexión de las compuertas lógicas, LabVIEW tiene el limitante de un máximo de dos entradas por cada compuerta AND u OR a usar, por lo cual se hace una conexión en cascada como se muestra en la Figura 21.
Figura 21. Conexión cascada Fuente: Software LabVIEW
Universidad Distrital Francisco José de Caldas
Página 27 de 52
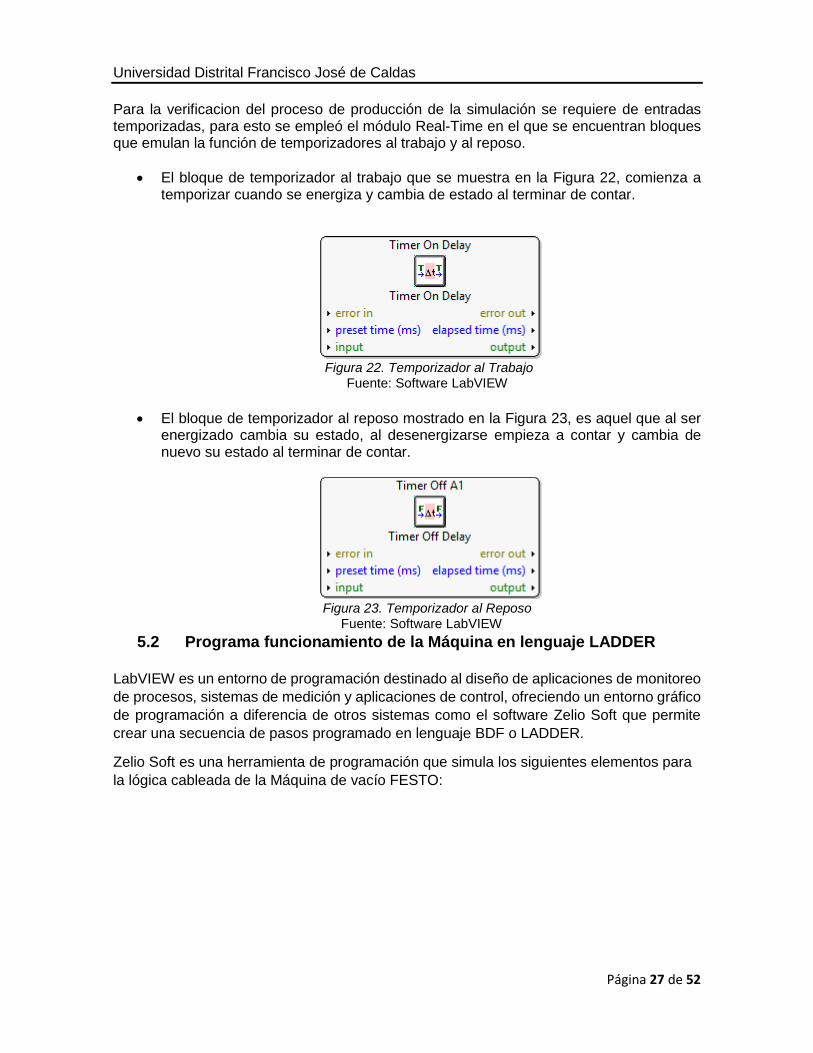
Para la verificacion del proceso de producción de la simulación se requiere de entradas temporizadas, para esto se empleó el módulo Real-Time en el que se encuentran bloques que emulan la función de temporizadores al trabajo y al reposo.
El bloque de temporizador al trabajo que se muestra en la Figura 22, comienza a temporizar cuando se energiza y cambia de estado al terminar de contar.
Figura 22. Temporizador al Trabajo
Fuente: Software LabVIEW
El bloque de temporizador al reposo mostrado en la Figura 23, es aquel que al ser energizado cambia su estado, al desenergizarse empieza a contar y cambia de nuevo su estado al terminar de contar.
Figura 23. Temporizador al Reposo
Fuente: Software LabVIEW
5.2 Programa funcionamiento de la Máquina en lenguaje LADDER
LabVIEW es un entorno de programación destinado al diseño de aplicaciones de monitoreo
de procesos, sistemas de medición y aplicaciones de control, ofreciendo un entorno gráfico
de programación a diferencia de otros sistemas como el software Zelio Soft que permite
crear una secuencia de pasos programado en lenguaje BDF o LADDER.
Zelio Soft es una herramienta de programación que simula los siguientes elementos para
la lógica cableada de la Máquina de vacío FESTO:
Universidad Distrital Francisco José de Caldas
Página 28 de 52
Hoja de cableado
Comando de las entradas
Comando de relés auxiliares
Comando de las salidas
Comandos de teclas Z
En el esquema del programa se observa el uso del comando relés auxiliares, ya que estos
se comportan como memorias, las cuales guardan la información de la línea respectiva para
su uso en cualquier otra línea, cumpliendo con las condiciones que se establecieron para
la activación de las salidas. Una característica importante que se observa en el esquema
de conexiones es el uso de SET y RESET los cuales permiten establecer la conexión y
reiniciar o terminar el ciclo respectivamente según lo que se desee programar, estos se
identifican acompañando al inicio del nombre de los comandos con la letra S y/o R como se
observa en la columna bobina en la hoja de cableado
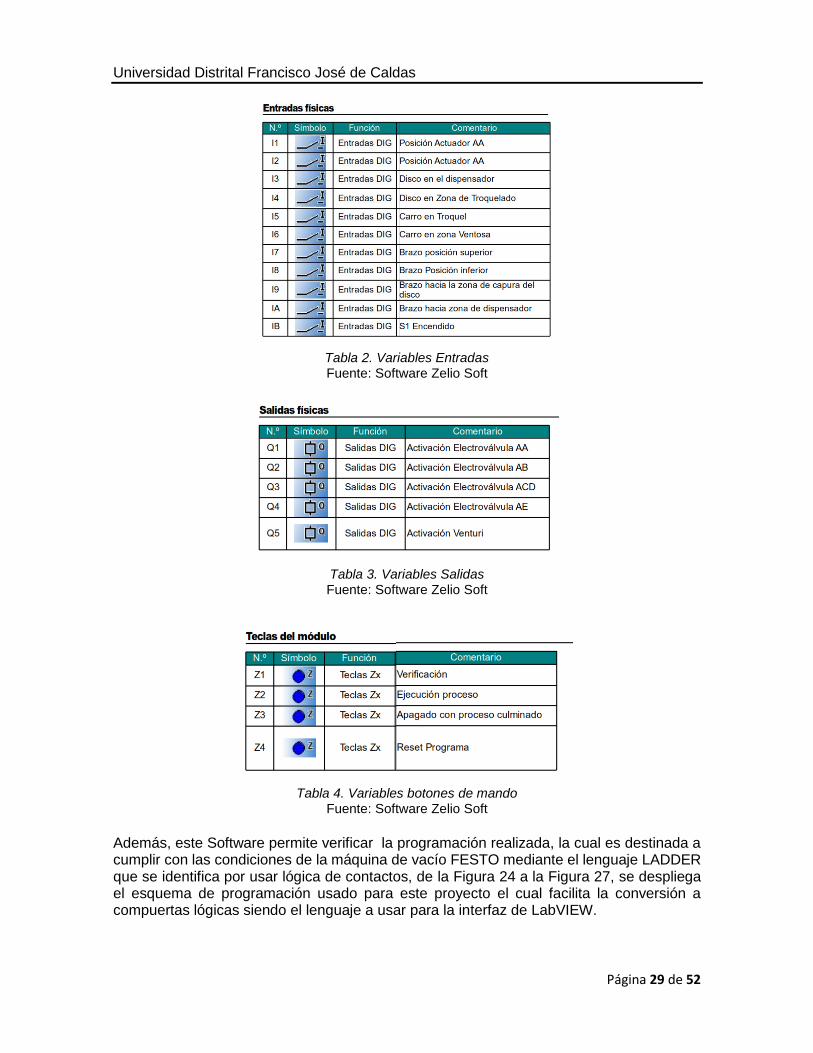
A continuación se identifican las variables de Entradas y Salidas usadas en la programación
de lógica de contactos en Zelio Soft para la Máquina de vacío FESTO.
Universidad Distrital Francisco José de Caldas
Página 29 de 52
Tabla 2. Variables Entradas Fuente: Software Zelio Soft
Tabla 3. Variables Salidas Fuente: Software Zelio Soft
Tabla 4. Variables botones de mando Fuente: Software Zelio Soft
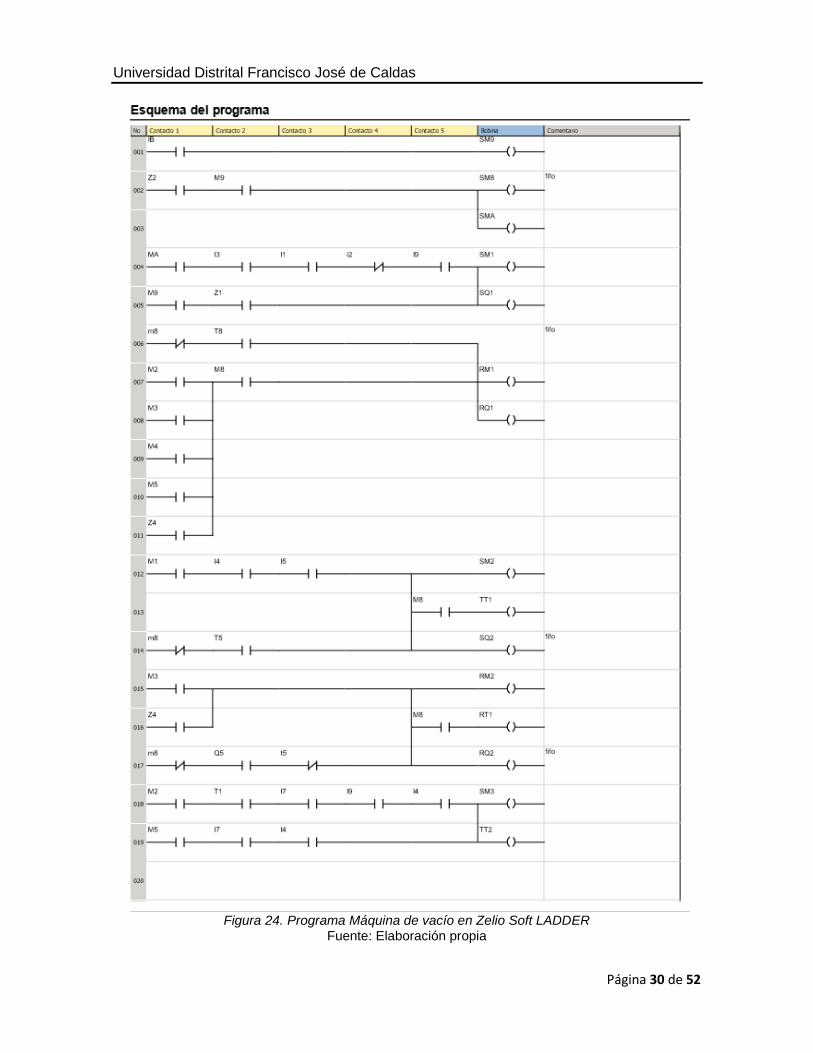
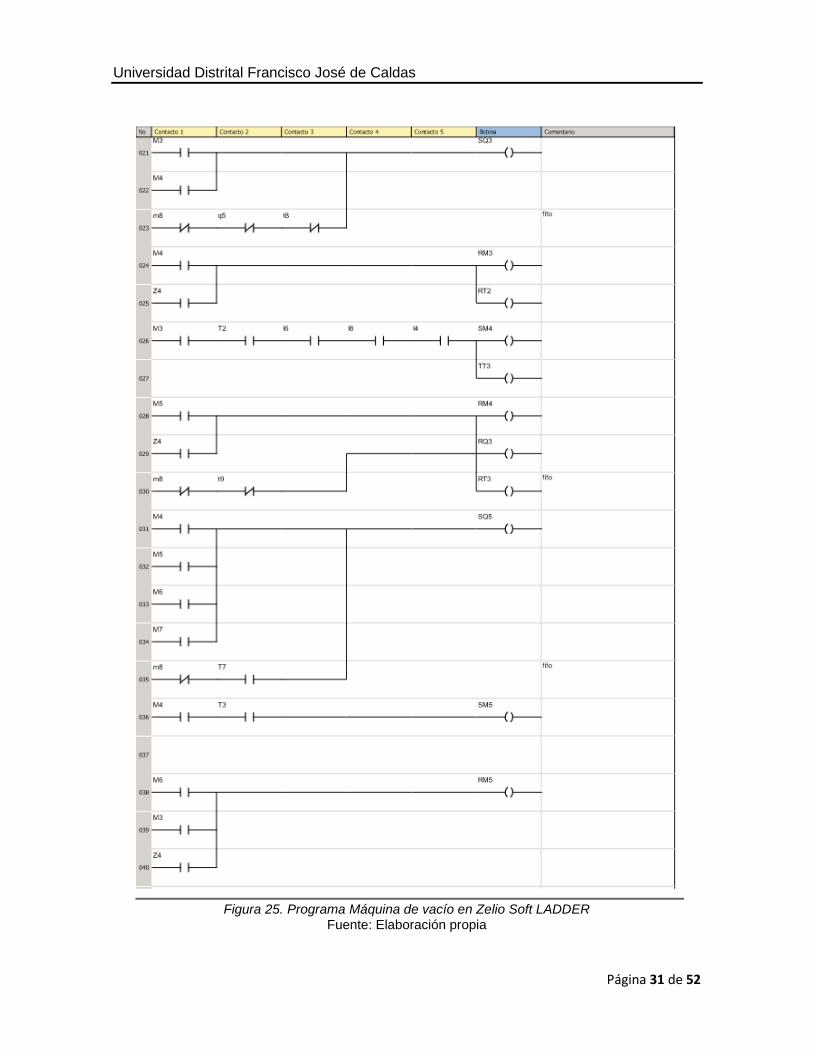
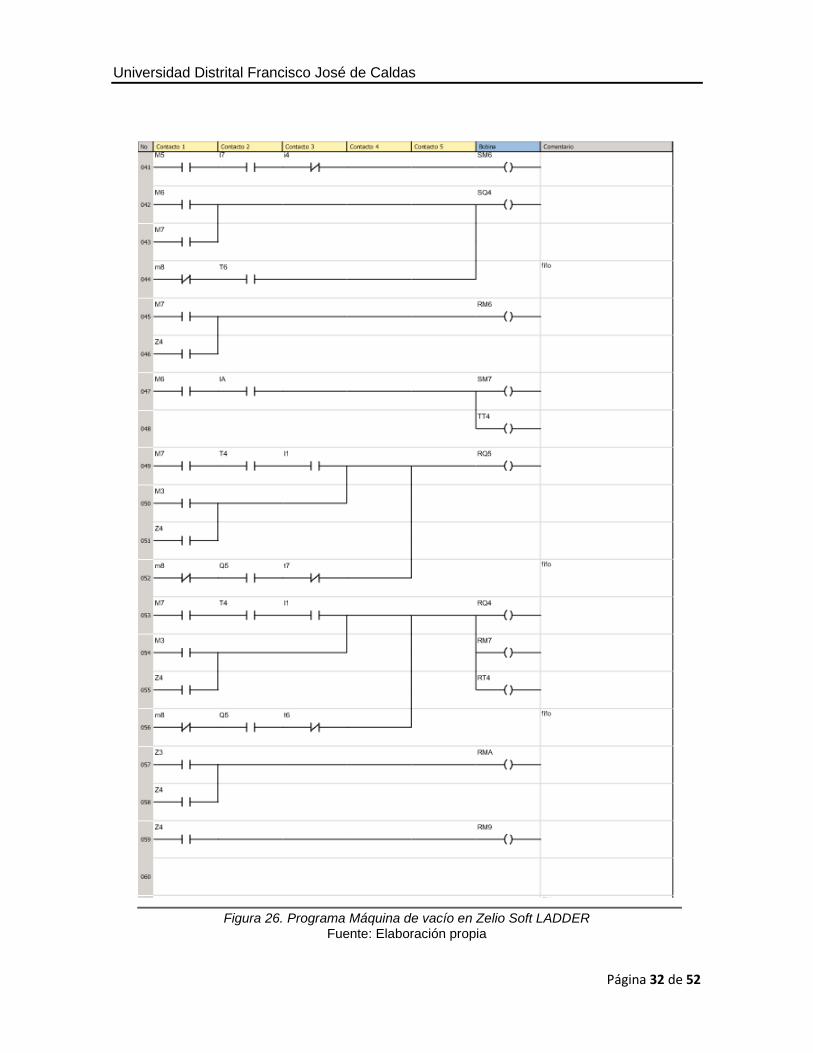
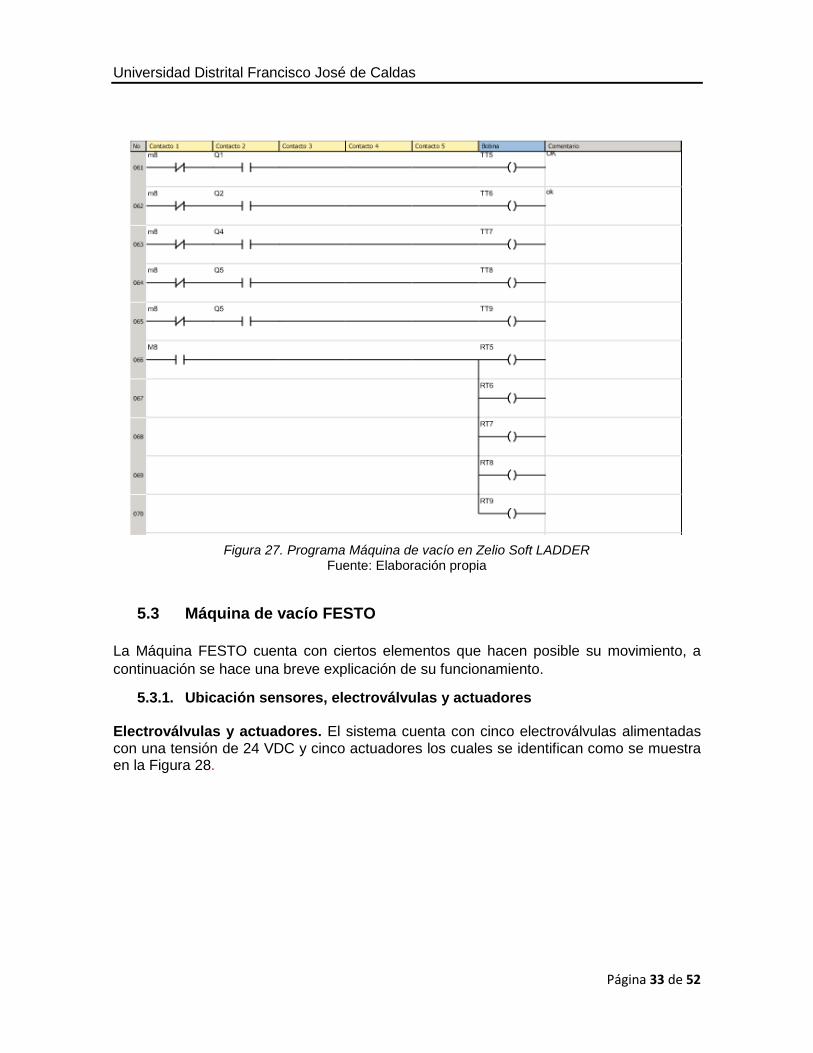
Además, este Software permite verificar la programación realizada, la cual es destinada a cumplir con las condiciones de la máquina de vacío FESTO mediante el lenguaje LADDER que se identifica por usar lógica de contactos, de la Figura 24 a la Figura 27, se despliega el esquema de programación usado para este proyecto el cual facilita la conversión a compuertas lógicas siendo el lenguaje a usar para la interfaz de LabVIEW.
Universidad Distrital Francisco José de Caldas
Página 30 de 52
Figura 24. Programa Máquina de vacío en Zelio Soft LADDER
Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 31 de 52
Figura 25. Programa Máquina de vacío en Zelio Soft LADDER
Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 32 de 52
Figura 26. Programa Máquina de vacío en Zelio Soft LADDER
Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 33 de 52
Figura 27. Programa Máquina de vacío en Zelio Soft LADDER
Fuente: Elaboración propia
5.3 Máquina de vacío FESTO La Máquina FESTO cuenta con ciertos elementos que hacen posible su movimiento, a
continuación se hace una breve explicación de su funcionamiento.
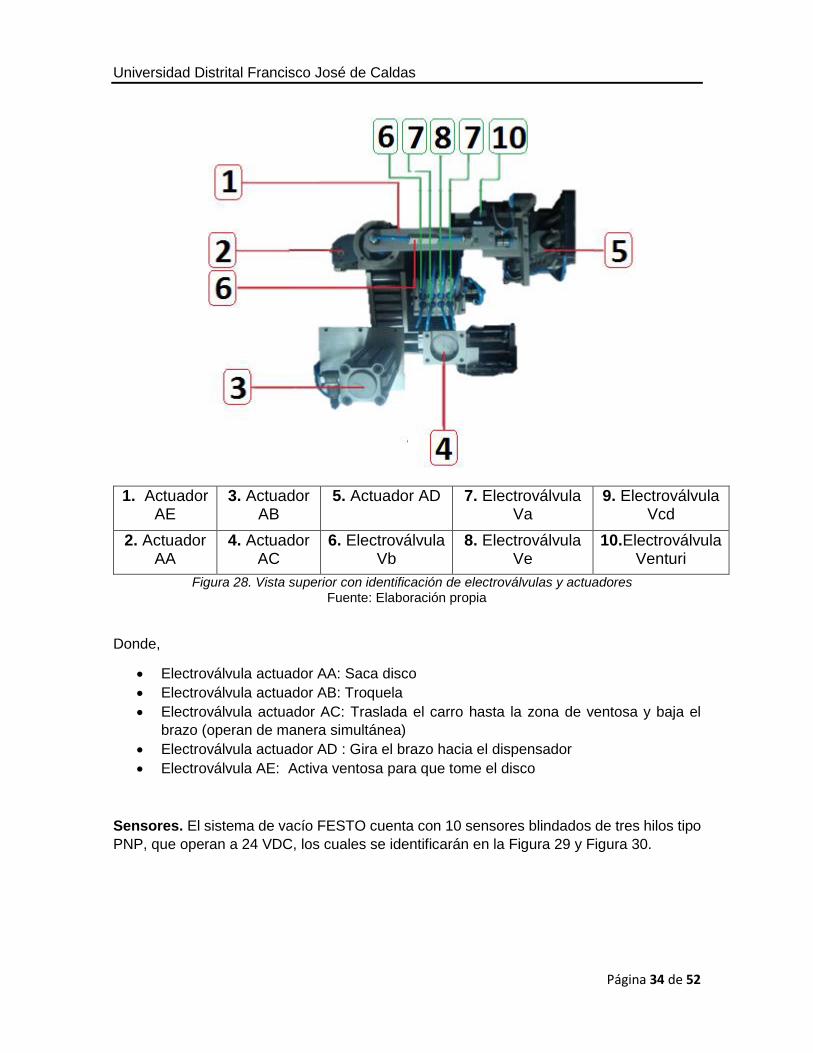
5.3.1. Ubicación sensores, electroválvulas y actuadores Electroválvulas y actuadores. El sistema cuenta con cinco electroválvulas alimentadas con una tensión de 24 VDC y cinco actuadores los cuales se identifican como se muestra en la Figura 28.
Universidad Distrital Francisco José de Caldas
Página 34 de 52
1. Actuador AE
3. Actuador AB
5. Actuador AD 7. Electroválvula Va
9. Electroválvula Vcd
2. Actuador AA
4. Actuador AC
6. Electroválvula Vb
8. Electroválvula Ve
10.Electroválvula Venturi
Figura 28. Vista superior con identificación de electroválvulas y actuadores Fuente: Elaboración propia
Donde,
Electroválvula actuador AA: Saca disco
Electroválvula actuador AB: Troquela
Electroválvula actuador AC: Traslada el carro hasta la zona de ventosa y baja el
brazo (operan de manera simultánea)
Electroválvula actuador AD : Gira el brazo hacia el dispensador
Electroválvula AE: Activa ventosa para que tome el disco
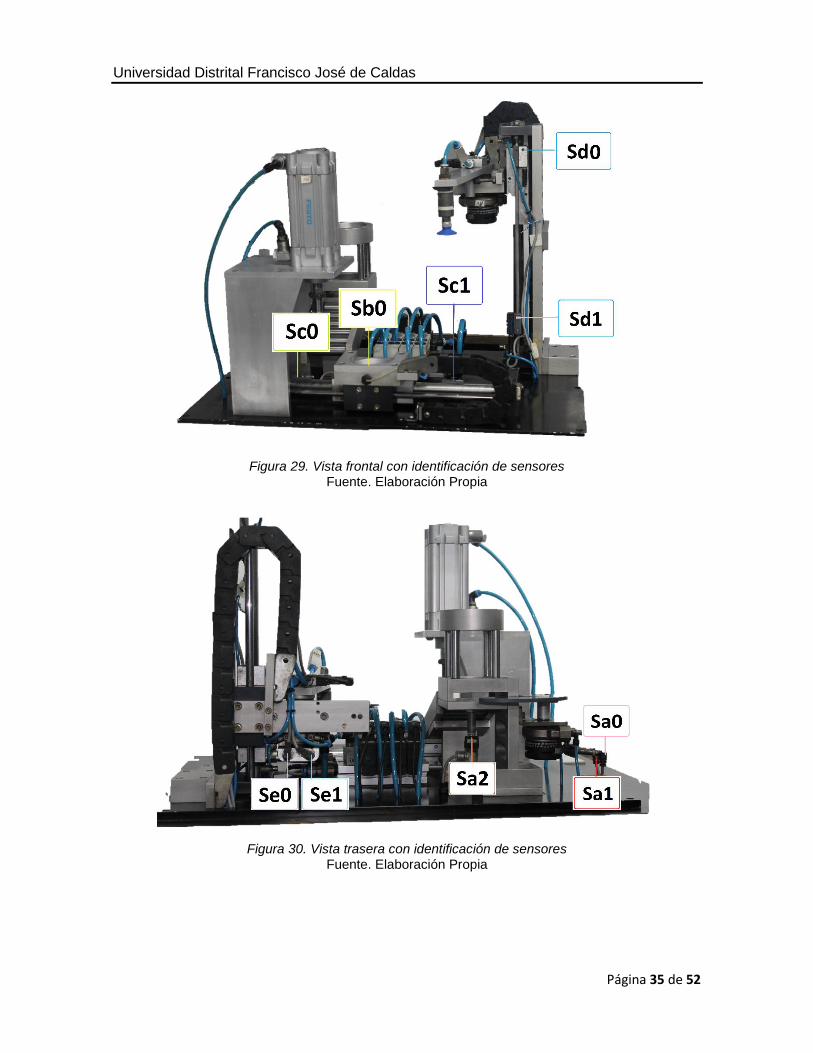
Sensores. El sistema de vacío FESTO cuenta con 10 sensores blindados de tres hilos tipo
PNP, que operan a 24 VDC, los cuales se identificarán en la Figura 29 y Figura 30.
Universidad Distrital Francisco José de Caldas
Página 35 de 52
Figura 29. Vista frontal con identificación de sensores Fuente. Elaboración Propia
Figura 30. Vista trasera con identificación de sensores Fuente. Elaboración Propia
Universidad Distrital Francisco José de Caldas
Página 36 de 52
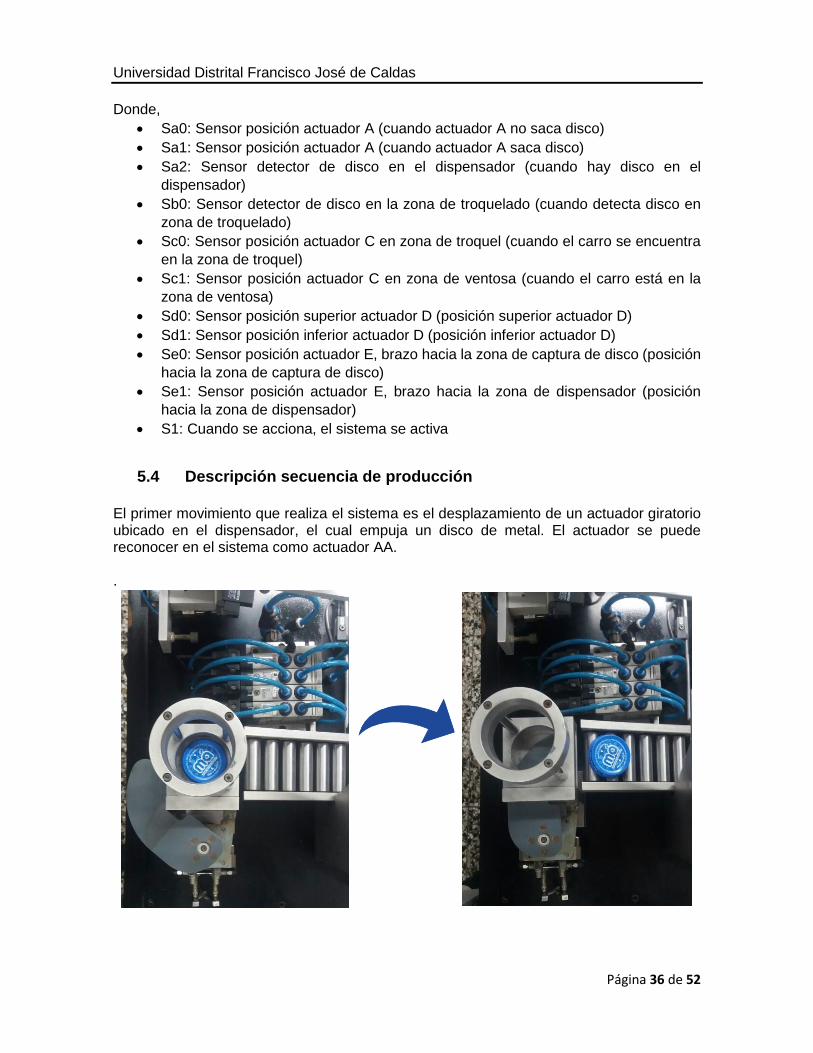
Donde,
Sa0: Sensor posición actuador A (cuando actuador A no saca disco)
Sa1: Sensor posición actuador A (cuando actuador A saca disco)
Sa2: Sensor detector de disco en el dispensador (cuando hay disco en el
dispensador)
Sb0: Sensor detector de disco en la zona de troquelado (cuando detecta disco en
zona de troquelado)
Sc0: Sensor posición actuador C en zona de troquel (cuando el carro se encuentra
en la zona de troquel)
Sc1: Sensor posición actuador C en zona de ventosa (cuando el carro está en la
zona de ventosa)
Sd0: Sensor posición superior actuador D (posición superior actuador D)
Sd1: Sensor posición inferior actuador D (posición inferior actuador D)
Se0: Sensor posición actuador E, brazo hacia la zona de captura de disco (posición
hacia la zona de captura de disco)
Se1: Sensor posición actuador E, brazo hacia la zona de dispensador (posición
hacia la zona de dispensador)
S1: Cuando se acciona, el sistema se activa
5.4 Descripción secuencia de producción
El primer movimiento que realiza el sistema es el desplazamiento de un actuador giratorio ubicado en el dispensador, el cual empuja un disco de metal. El actuador se puede reconocer en el sistema como actuador AA. .
Universidad Distrital Francisco José de Caldas
Página 37 de 52
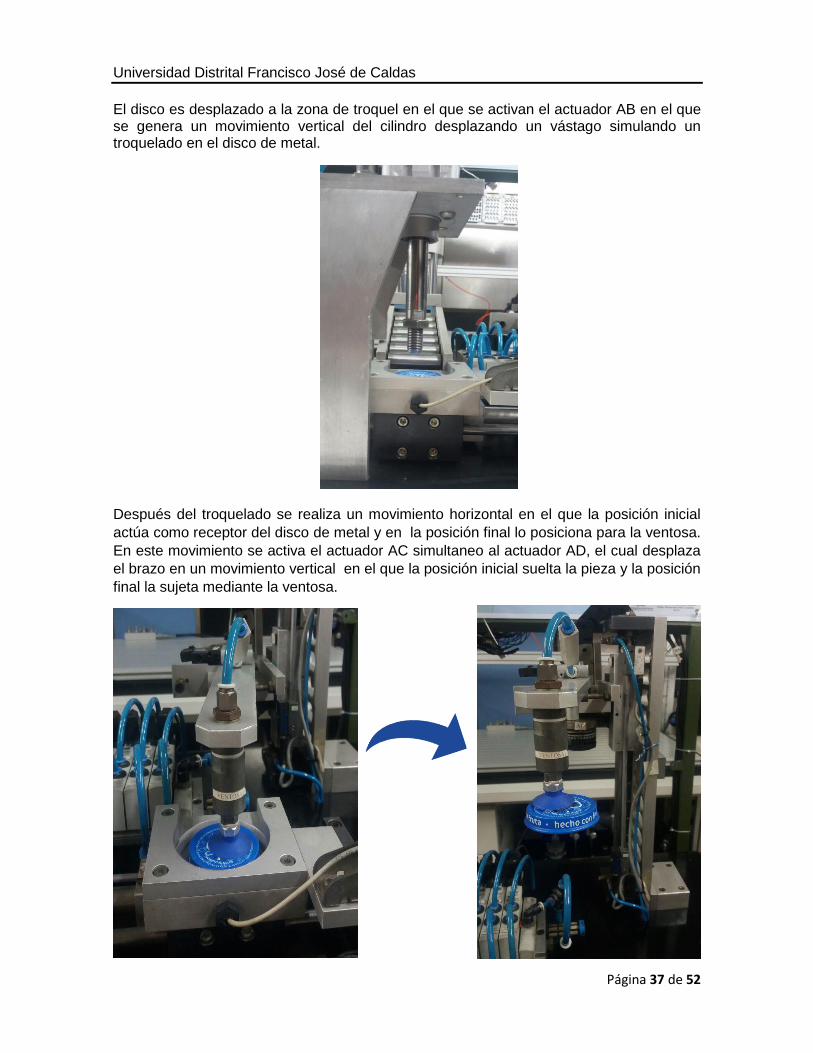
El disco es desplazado a la zona de troquel en el que se activan el actuador AB en el que se genera un movimiento vertical del cilindro desplazando un vástago simulando un troquelado en el disco de metal.
Después del troquelado se realiza un movimiento horizontal en el que la posición inicial
actúa como receptor del disco de metal y en la posición final lo posiciona para la ventosa.
En este movimiento se activa el actuador AC simultaneo al actuador AD, el cual desplaza
el brazo en un movimiento vertical en el que la posición inicial suelta la pieza y la posición
final la sujeta mediante la ventosa.
Universidad Distrital Francisco José de Caldas
Página 38 de 52
Los dos actuadores descritos anteriormente realizan un movimiento simultáneo ya que están controlados por la misma electroválvula. Por último, la aspiración de la ventosa la cual basa su funcionamiento en el principio de Venturi (de presión), utilizando aire comprimido en su entrada, aumenta la velocidad del aire produciendo una presión o succión, sistema incorporado en el brazo para sujetar el disco y transportarlo de nuevo a la zona del dispensador. Este procedimiento se realiza con un movimiento rotacional que hace el brazo como desplazamiento final del ciclo de la secuencia de producción, se puede reconocer en el sistema como actuador AE.
6. Resultados
La interfaz LabVIEW- Arduino se realizó cumpliendo con todos los pasos propuestos, desde
la instalación de los programas requeridos e implementación de librerías, hasta la consulta
de la función de cada uno de los bloques que se necesitaron para el diseño de la
programación del control de la máquina de vacío FESTO.
6.1 Programa funcionamiento de la Máquina Compuertas Lógicas
Realizado el control de la Máquina de vacío FESTO en LADDER y del cual se comprobó con anterioridad que cumple con todos los requisitos y condiciones dadas, se procede a realizar la conversión de lógica de contactos a compuertas lógicas teniendo en cuenta la equivalencia de la Figura 2. De la Figura 31 a la Figura 32 se refleja el diseño del circuito lógico en LabVIEW.
Universidad Distrital Francisco José de Caldas
Página 39 de 52
Figura 31. Programa Máquina de vacío en compuertas lógicas LabVIEW Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 40 de 52
Figura 32. Programa Máquina de vacío en compuertas lógicas LabVIEW Fuente: Elaboración propia
El uso de circuitos digitales es un punto clave para el diseño de la programación en el
software LabVIEW ya que el tipo de control que necesita esta máquina requiere de entradas
temporizadas que crean un estado actual y un estado siguiente, por lo cual fue necesario
el uso de Flip Flop que tiene como función guardar información y transferir datos digitales,
esto permitió cumplir con la secuencia diseñada en el programa.
Universidad Distrital Francisco José de Caldas
Página 41 de 52
Ya creado el programa de control de la Máquina de vacío FESTO, un aspecto importante
que se ejecutó para el desarrollo del proyecto, se basó en el cambio del panel de
conexiones de la máquina con el objetivo de crear un entorno más seguro en el momento
de realizar las respectivas conexiones a la Tarjeta Arduino. Después de contar con el panel
de conexiones nuevo se llevó a cabo la revisión del buen funcionamiento de los sensores y
las electroválvulas para finalmente comprobar que el programa de control realizado en la
interfaz LabVIEW – Arduino fue exitoso.
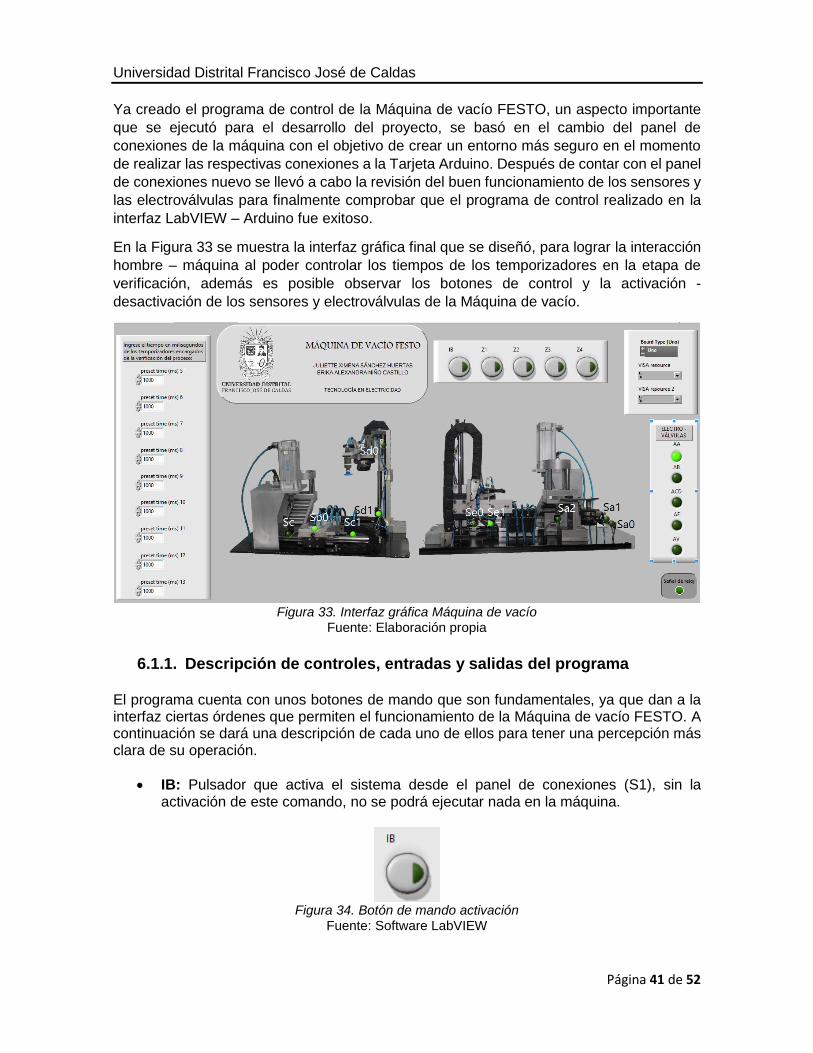
En la Figura 33 se muestra la interfaz gráfica final que se diseñó, para lograr la interacción
hombre – máquina al poder controlar los tiempos de los temporizadores en la etapa de
verificación, además es posible observar los botones de control y la activación -
desactivación de los sensores y electroválvulas de la Máquina de vacío.
Figura 33. Interfaz gráfica Máquina de vacío
Fuente: Elaboración propia
6.1.1. Descripción de controles, entradas y salidas del programa
El programa cuenta con unos botones de mando que son fundamentales, ya que dan a la interfaz ciertas órdenes que permiten el funcionamiento de la Máquina de vacío FESTO. A continuación se dará una descripción de cada uno de ellos para tener una percepción más clara de su operación.
IB: Pulsador que activa el sistema desde el panel de conexiones (S1), sin la activación de este comando, no se podrá ejecutar nada en la máquina.
Figura 34. Botón de mando activación
Fuente: Software LabVIEW
Universidad Distrital Francisco José de Caldas
Página 42 de 52
Z1: Se encarga de la verificación y activación de los actuadores (salidas del programa) cumpliendo la siguiente secuencia automática sin la presencia del disco:
Figura 35. Botón de mando 1
Fuente: Software Labview
Electroválvula actuador AA: Saca disco
Electroválvula actuador AB: Troquela
Electroválvula actuador AC: Traslada el carro hasta la zona de ventosa y baja el
brazo (operan de manera simultánea)
Electroválvula AE: Activa ventosa para que tome el disco
Electroválvula actuador AD : Gira el brazo hacia el dispensador
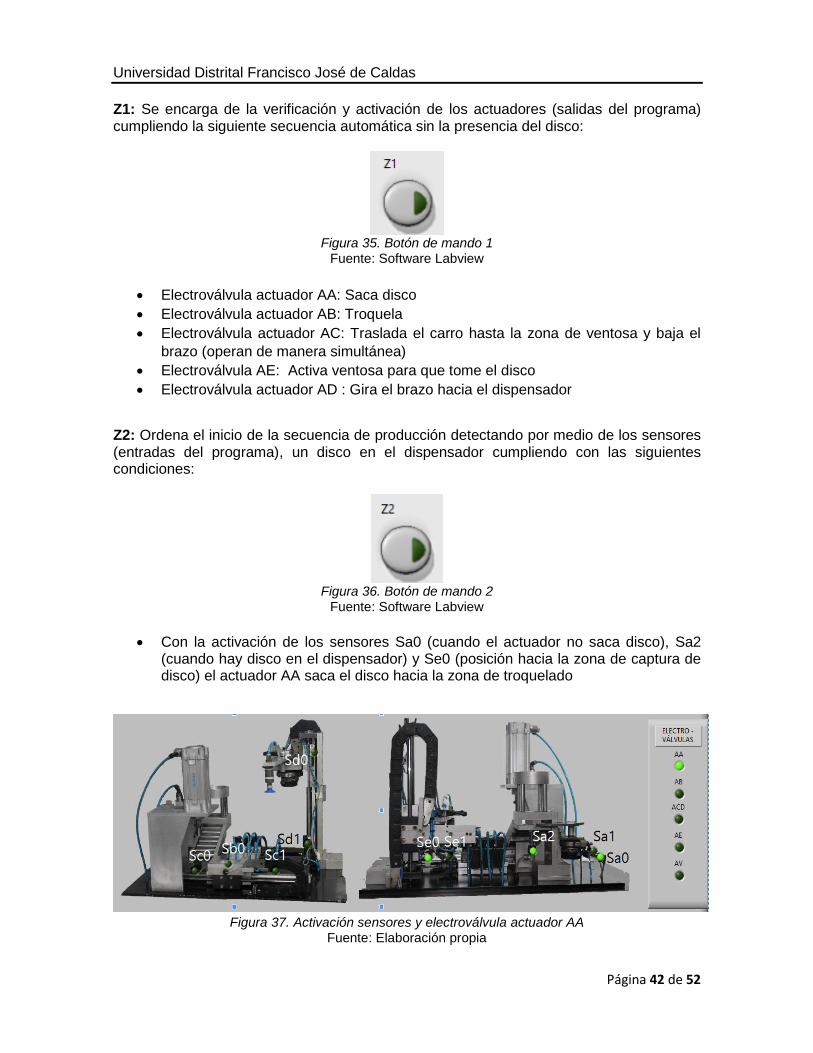
Z2: Ordena el inicio de la secuencia de producción detectando por medio de los sensores (entradas del programa), un disco en el dispensador cumpliendo con las siguientes condiciones:
Figura 36. Botón de mando 2
Fuente: Software Labview
Con la activación de los sensores Sa0 (cuando el actuador no saca disco), Sa2 (cuando hay disco en el dispensador) y Se0 (posición hacia la zona de captura de disco) el actuador AA saca el disco hacia la zona de troquelado
Figura 37. Activación sensores y electroválvula actuador AA Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 43 de 52
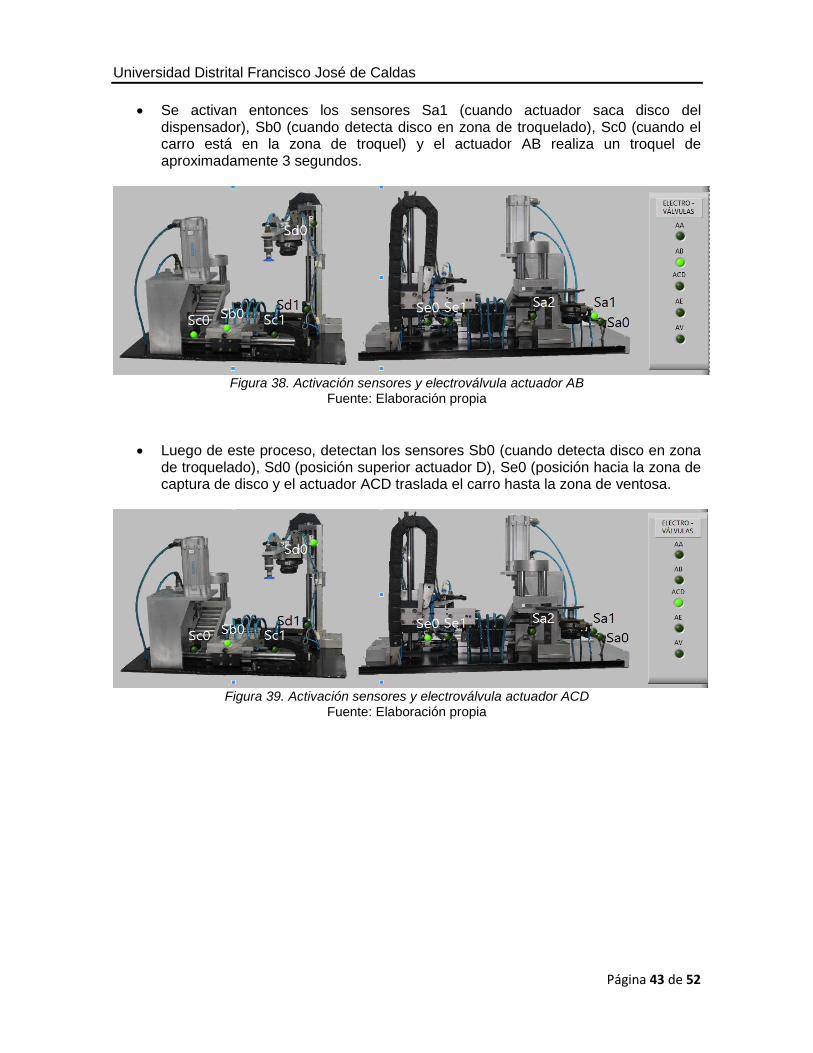
Se activan entonces los sensores Sa1 (cuando actuador saca disco del dispensador), Sb0 (cuando detecta disco en zona de troquelado), Sc0 (cuando el carro está en la zona de troquel) y el actuador AB realiza un troquel de aproximadamente 3 segundos.
Figura 38. Activación sensores y electroválvula actuador AB
Fuente: Elaboración propia
Luego de este proceso, detectan los sensores Sb0 (cuando detecta disco en zona de troquelado), Sd0 (posición superior actuador D), Se0 (posición hacia la zona de captura de disco y el actuador ACD traslada el carro hasta la zona de ventosa.
Figura 39. Activación sensores y electroválvula actuador ACD
Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 44 de 52
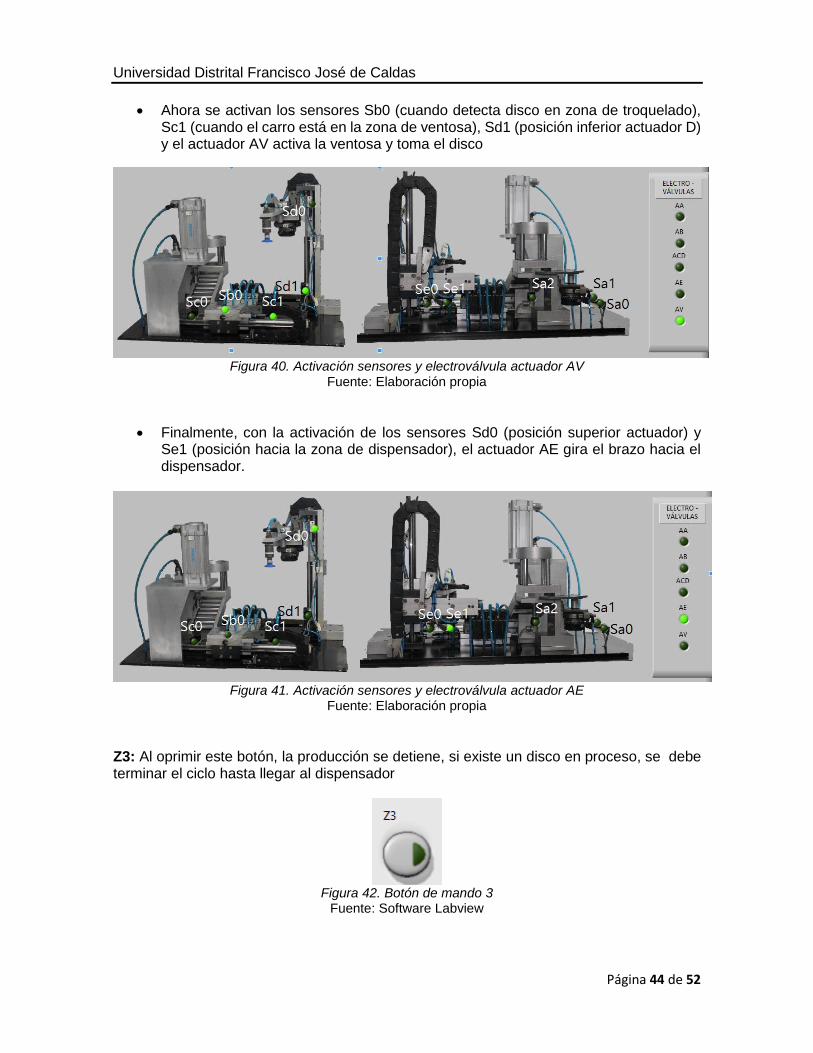
Ahora se activan los sensores Sb0 (cuando detecta disco en zona de troquelado), Sc1 (cuando el carro está en la zona de ventosa), Sd1 (posición inferior actuador D) y el actuador AV activa la ventosa y toma el disco
Figura 40. Activación sensores y electroválvula actuador AV Fuente: Elaboración propia
Finalmente, con la activación de los sensores Sd0 (posición superior actuador) y Se1 (posición hacia la zona de dispensador), el actuador AE gira el brazo hacia el dispensador.
Figura 41. Activación sensores y electroválvula actuador AE
Fuente: Elaboración propia
Z3: Al oprimir este botón, la producción se detiene, si existe un disco en proceso, se debe terminar el ciclo hasta llegar al dispensador
Figura 42. Botón de mando 3
Fuente: Software Labview
Universidad Distrital Francisco José de Caldas
Página 45 de 52
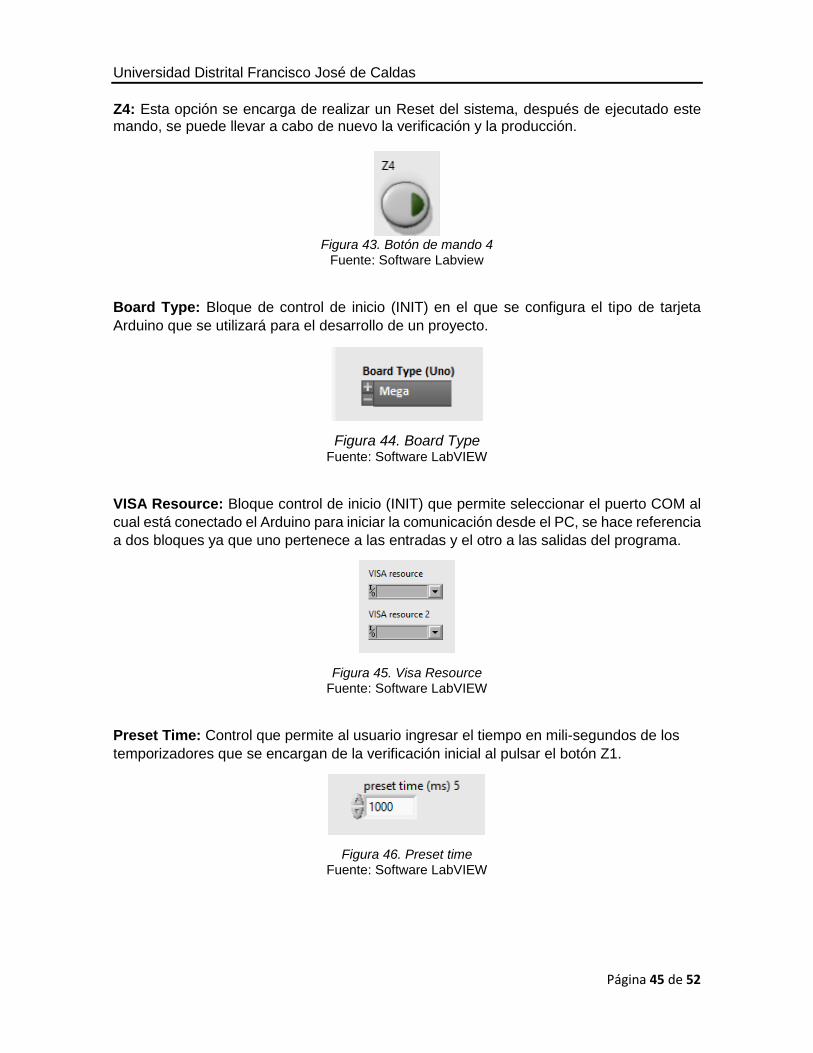
Z4: Esta opción se encarga de realizar un Reset del sistema, después de ejecutado este mando, se puede llevar a cabo de nuevo la verificación y la producción.
Figura 43. Botón de mando 4
Fuente: Software Labview
Board Type: Bloque de control de inicio (INIT) en el que se configura el tipo de tarjeta
Arduino que se utilizará para el desarrollo de un proyecto.
Figura 44. Board Type Fuente: Software LabVIEW
VISA Resource: Bloque control de inicio (INIT) que permite seleccionar el puerto COM al
cual está conectado el Arduino para iniciar la comunicación desde el PC, se hace referencia
a dos bloques ya que uno pertenece a las entradas y el otro a las salidas del programa.
Figura 45. Visa Resource Fuente: Software LabVIEW
Preset Time: Control que permite al usuario ingresar el tiempo en mili-segundos de los
temporizadores que se encargan de la verificación inicial al pulsar el botón Z1.
Figura 46. Preset time Fuente: Software LabVIEW
Universidad Distrital Francisco José de Caldas
Página 46 de 52
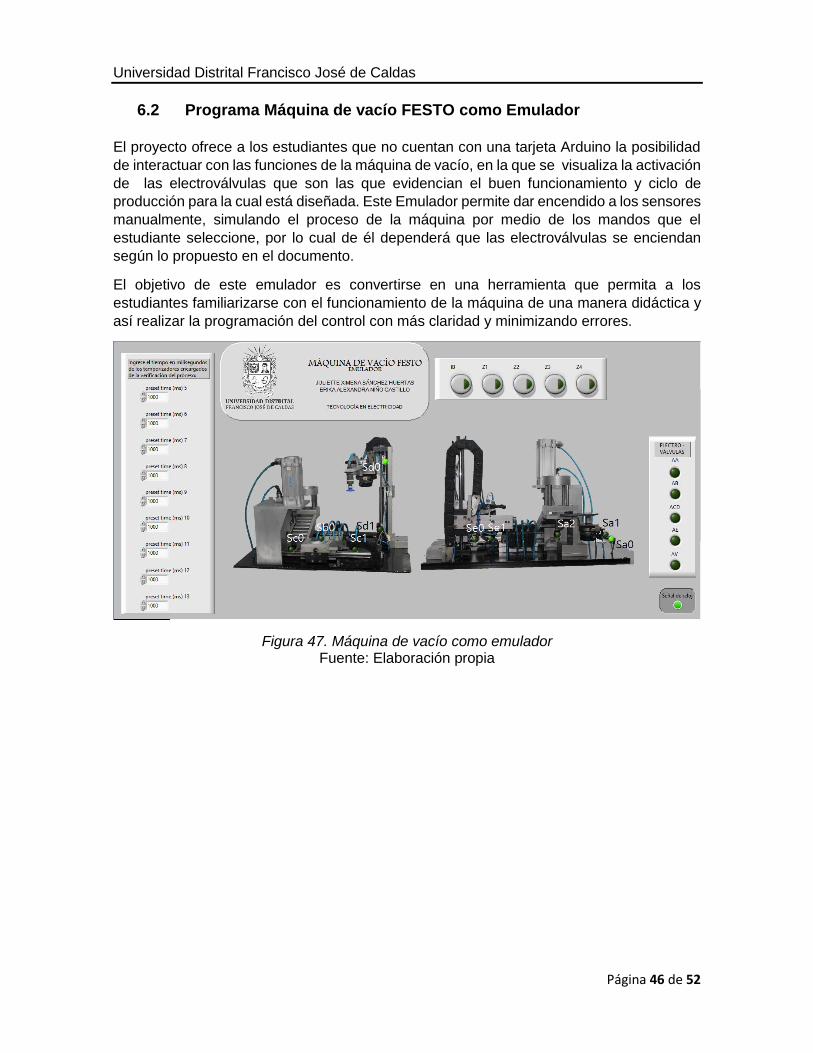
6.2 Programa Máquina de vacío FESTO como Emulador
El proyecto ofrece a los estudiantes que no cuentan con una tarjeta Arduino la posibilidad
de interactuar con las funciones de la máquina de vacío, en la que se visualiza la activación
de las electroválvulas que son las que evidencian el buen funcionamiento y ciclo de
producción para la cual está diseñada. Este Emulador permite dar encendido a los sensores
manualmente, simulando el proceso de la máquina por medio de los mandos que el
estudiante seleccione, por lo cual de él dependerá que las electroválvulas se enciendan
según lo propuesto en el documento.
El objetivo de este emulador es convertirse en una herramienta que permita a los
estudiantes familiarizarse con el funcionamiento de la máquina de una manera didáctica y
así realizar la programación del control con más claridad y minimizando errores.
Figura 47. Máquina de vacío como emulador Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 47 de 52
7. Conexión Interfaz – Máquina de vacío FESTO
Para la conexión que se realizó con el fin de obtener el correcto funcionamiento de la
Máquina de vacío se hizo necesario la implementación de los siguientes elementos:
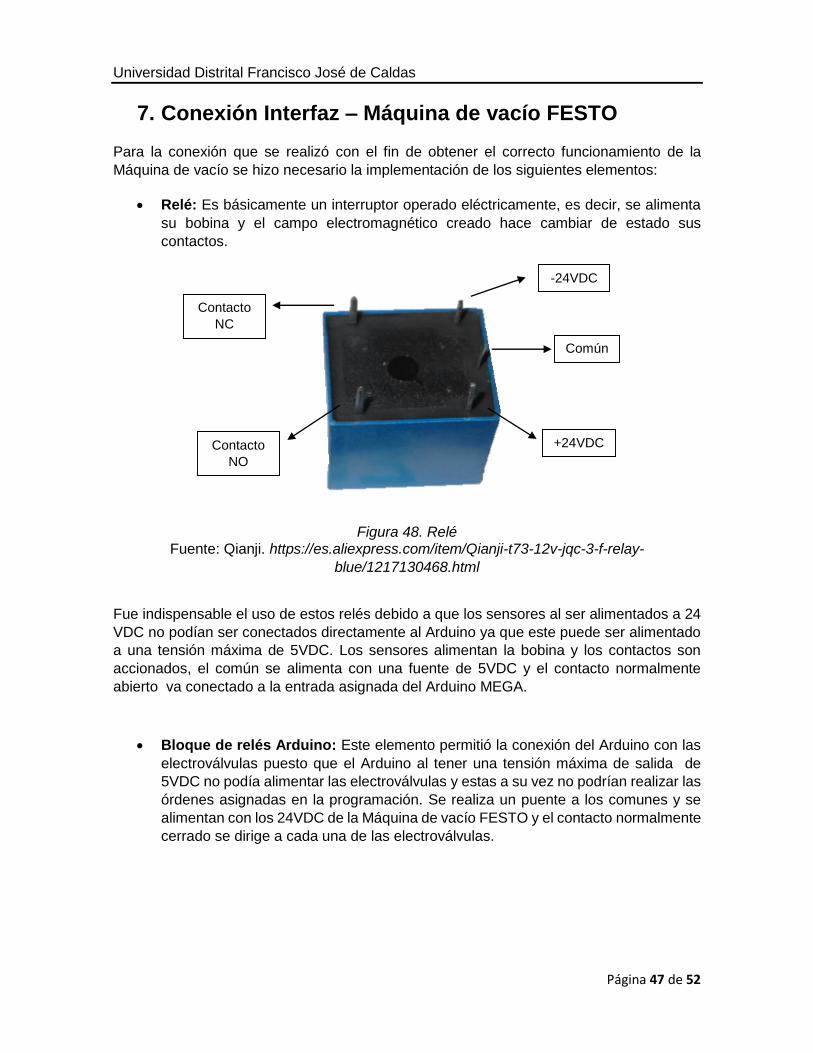
Relé: Es básicamente un interruptor operado eléctricamente, es decir, se alimenta
su bobina y el campo electromagnético creado hace cambiar de estado sus
contactos.
Figura 48. Relé Fuente: Qianji. https://es.aliexpress.com/item/Qianji-t73-12v-jqc-3-f-relay-
blue/1217130468.html
Fue indispensable el uso de estos relés debido a que los sensores al ser alimentados a 24
VDC no podían ser conectados directamente al Arduino ya que este puede ser alimentado
a una tensión máxima de 5VDC. Los sensores alimentan la bobina y los contactos son
accionados, el común se alimenta con una fuente de 5VDC y el contacto normalmente
abierto va conectado a la entrada asignada del Arduino MEGA.
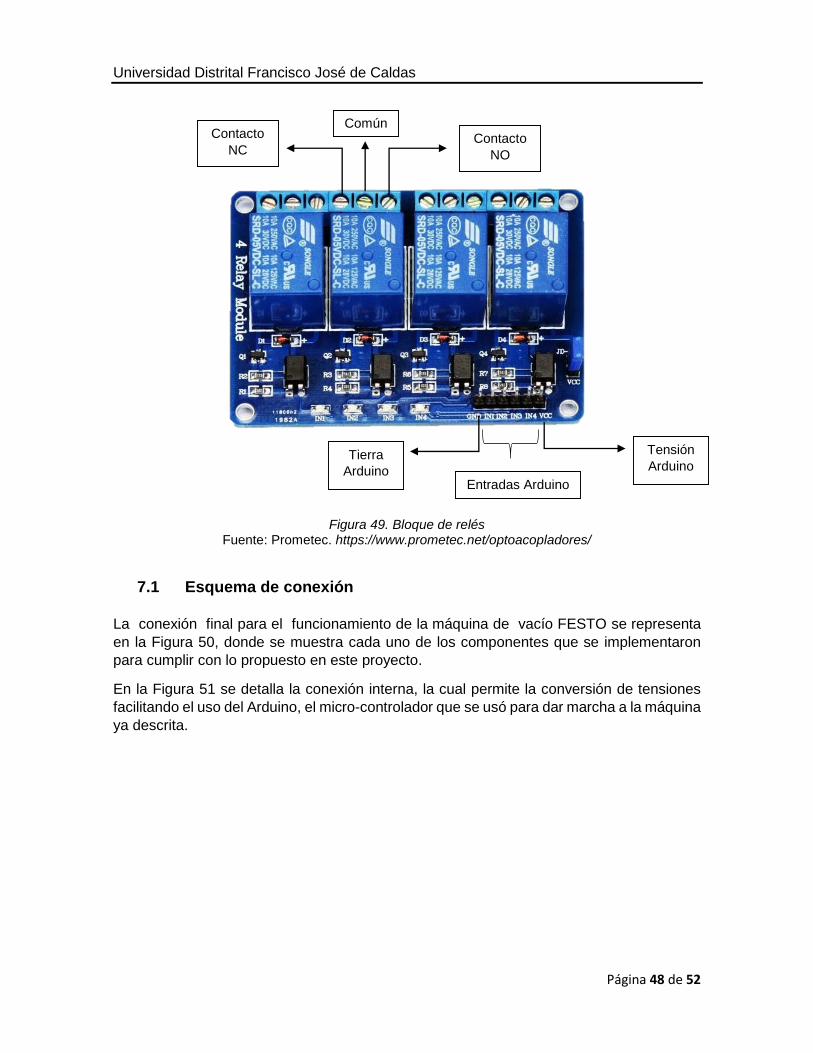
Bloque de relés Arduino: Este elemento permitió la conexión del Arduino con las
electroválvulas puesto que el Arduino al tener una tensión máxima de salida de
5VDC no podía alimentar las electroválvulas y estas a su vez no podrían realizar las
órdenes asignadas en la programación. Se realiza un puente a los comunes y se
alimentan con los 24VDC de la Máquina de vacío FESTO y el contacto normalmente
cerrado se dirige a cada una de las electroválvulas.
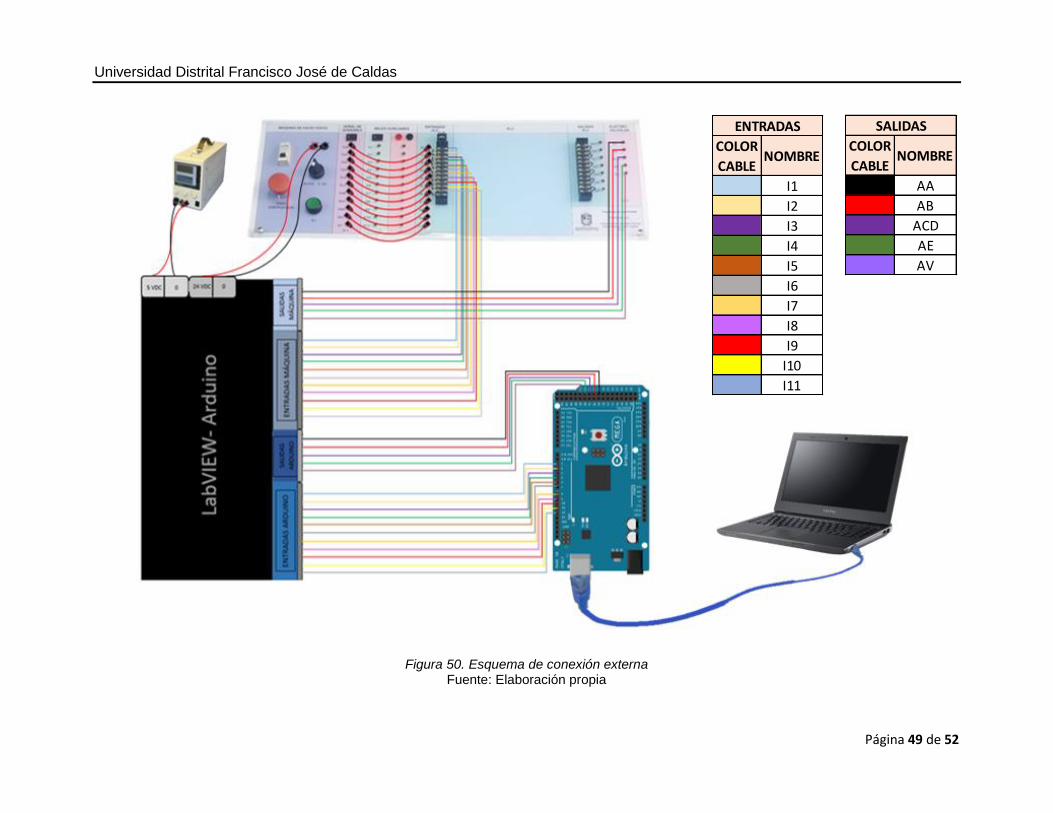
La conexión final para el funcionamiento de la máquina de vacío FESTO se representa
en la Figura 50, donde se muestra cada uno de los componentes que se implementaron
para cumplir con lo propuesto en este proyecto.
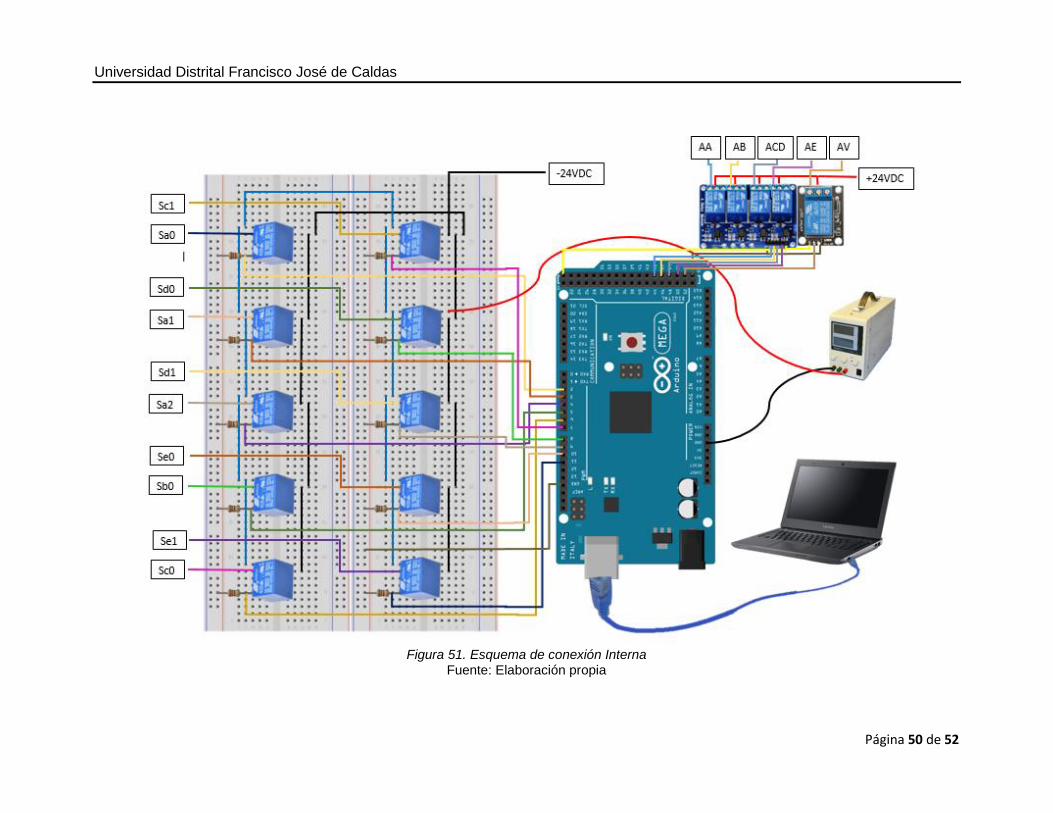
En la Figura 51 se detalla la conexión interna, la cual permite la conversión de tensiones
facilitando el uso del Arduino, el micro-controlador que se usó para dar marcha a la máquina
ya descrita.
Común Contacto
NC
Contacto
NO
Tierra
Arduino
Tensión
Arduino
Entradas Arduino
Universidad Distrital Francisco José de Caldas
Página 49 de 52
Figura 50. Esquema de conexión externa
Fuente: Elaboración propia
COLOR
CABLENOMBRE
I1
I2
I3
I4
I5
I6
I7
I8
I9
I10
I11
ENTRADAS
COLOR
CABLENOMBRE
AA
AB
ACD
AE
AV
SALIDAS
Universidad Distrital Francisco José de Caldas
Página 50 de 52
Figura 51. Esquema de conexión Interna
Fuente: Elaboración propia
Universidad Distrital Francisco José de Caldas
Página 51 de 52
8. Conclusiones
Se demostró la viabilidad de realizar la implementación de una Interfaz que
permitiera la comunicación entre LabVIEW y Arduino, y con ella la construcción de
un programa en compuertas lógicas en un entorno agradable y de fácil interpretación
para los estudiantes como lo es el software LabVIEW con el que se logró el control
automático de la Máquina de vacío FESTO.
La Interfaz realizada proporcionó las herramientas necesarias para la elaboración
de un manual de instrucciones que suministra al usuario la información, los
elementos requeridos y el paso a paso para lograrla y así poder desarrollar
diferentes proyectos de automatización.
LabVIEW facilita la incorporación de imágenes y diferentes complementos lo que
permitió el desarrollo de una interfaz gráfica en la que se puede visualizar la
activación y desactivación de los elementos que componen la Máquina de vacío
FESTO.
Gracias a esta interfaz se logró comprobar que es posible programar Arduino como
una estrategia de control para los procesos de automatización de pequeña escala y
de aplicaciones académicas.
El uso de esta herramienta facilita la manipulación del software LabVIEW creando
una interacción de manera gráfica y en la que se fortalecen los conocimientos
relacionados con el control y la automatización, aspectos que son importantes para
el desarrollo de la carrera respecto a las asignaturas afines. Al mismo tiempo este
material permite a los estudiantes familiarizarse con el software ya que se encuentra
disponible en la Universidad Distrital Francisco José de Caldas.
9. Bibliografía
[1] “¿Qué es la automatización de procesos?” [Online]. Available: https://es.over-blog.com/Que_es_la_automatizacion_de_procesos-1228321767-art127041.html. [Accessed: 31-Oct-2017].
[6] “LabVIEW Interface for Arduino | VI Package Manager.” [Online]. Available: https://vipm.jki.net/package/national_instruments_lib_labview_interface_for_arduino. [Accessed: 28-Nov-2017].
[7] L. RAMÍREZ and J. TORRES, “ADECUACIÓN DEL SISTEMA DE VACÍO FESTO PERTENECIENTE AL LABORATORIO DE AUTOMATIZACIÓN Y CONTROL (LE-MC-01) DEL PROYECTO CURRICULAR DE TECNOLOGÍA EN MECÁNICA.”