Distributed Computing with Adaptive Heuristics Michael Schapira Princeton Innovations in Computer Science 09 January 2011 Partially supported by NSF Aaron D. Jaggard Rutgers/Colgate Rebecca N. Wright Rutgers
Transcript
Distributed Computingwith Adaptive Heuristics
Michael SchapiraPrinceton
Innovations in Computer Science09 January 2011
Partially supported by NSF
Aaron D. JaggardRutgers/Colgate
Rebecca N. WrightRutgers
This Talk
• Identify new aspects of the boundary between game theory and distributed computing
• Look at some initial results
• Identify various avenues for future work
nodes interacting in an asynchronous environment
simple, myopic rules of behavior;convergence in synchronized
environment
Background Areas
Motivation
Many real-world settings involve both simple, myopic behavior and asynchronicity
Goal: Explore dynamics of adaptive heuristics when
asynchrony is allowed
Goal: Explore dynamics of adaptive heuristics when
asynchrony is allowed
Research Agenda
novel applications in
distributed computing
(congestion control, asynchronous circuits,…)
new questionsin game theory and economics
(fictitious play, regret minimization,…)
Understanding when Dynamics Converge: A Simple Example
• Two stable states (pure Nash equilibria)
(5,4)(5,4) (1,1)(1,1)
(0,0)(0,0) (4,5)(4,5)
Bach
Stravinsky
Bach Stravinsky
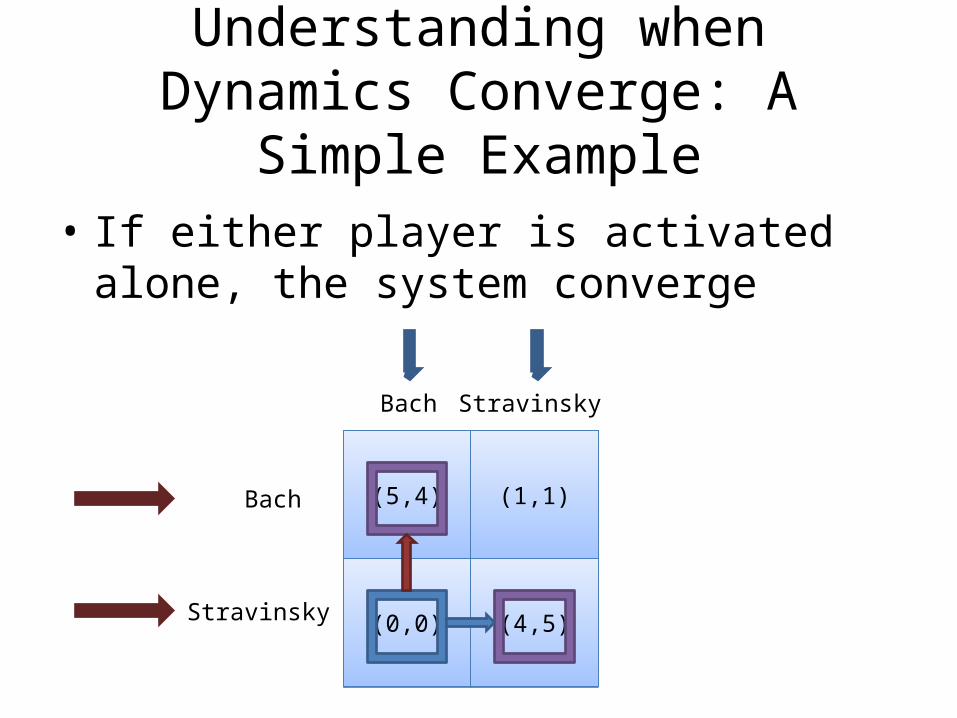
Understanding when Dynamics Converge: A Simple Example
• If either player is activated alone, the system converge
(5,4)(5,4) (1,1)(1,1)
(0,0)(0,0) (4,5)(4,5)
Bach
Stravinsky
Bach Stravinsky
Understanding when Dynamics Converge: A Simple Example
• Without control over who is activated, the system might not converge
(5,4)(5,4) (1,1)(1,1)
(0,0)(0,0) (4,5)(4,5)
Bach
Stravinsky
Bach Stravinsky
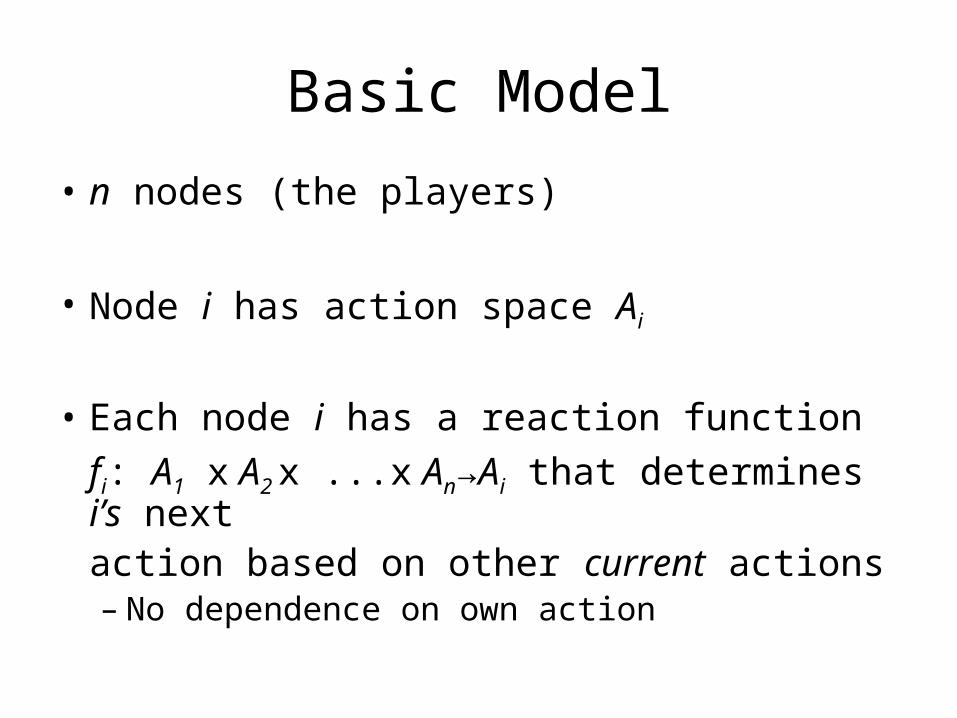
Basic Model
• n nodes (the players)
• Node i has action space Ai
• Each node i has a reaction functionfi: A1 x A2 x ...x An→Ai that determines i’s nextaction based on other current actions– No dependence on own action
Dynamics
• Infinite sequence of discrete timesteps t = 1, …
• Schedule s:{1,…} → 2[n] determines which set of players is activated at time t.– Fair schedules
• Start at an initial state; at each time step t, let the nodes in s(t) react using their reaction functions
Convergence
• The players’ action profile a=(a1,…, an) is a stable state if fi(a) = ai for every i.
• The system is convergent if the dynamics always converge (for all initial states and all fair schedules)
Two High-Level Questions
• What classes of systems are guaranteed (or cannot be guaranteed) to always converge to a stable state?
• How hard is it to determine whether a system always converges to a stable state?
Basic Result
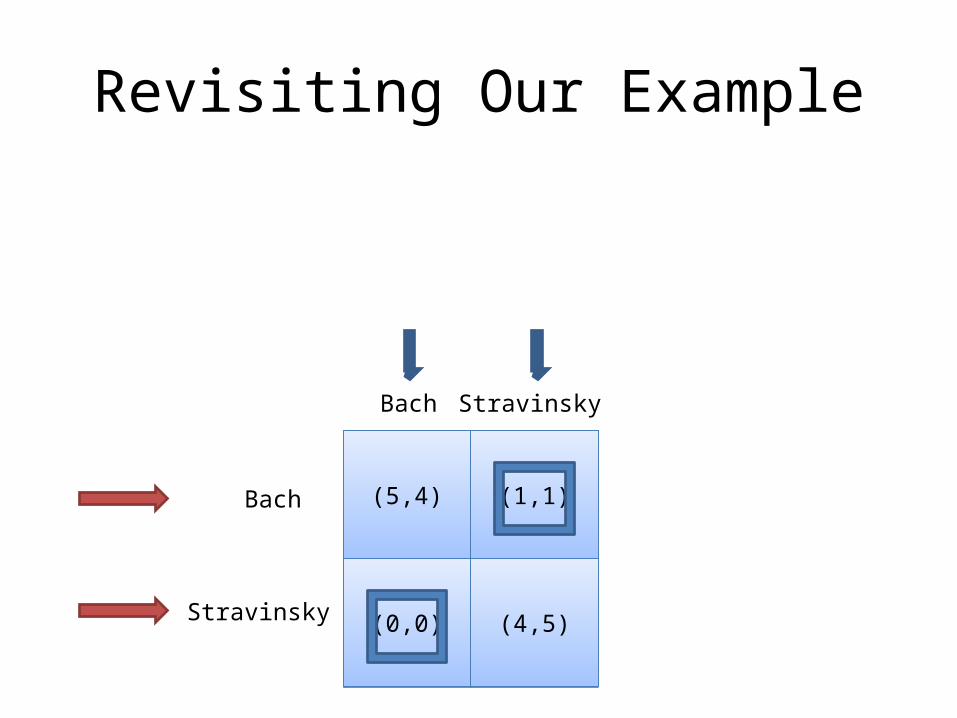
Theorem: If the system has multiple stable states, then the system is not convergent. (I.e., there is some initial state and some schedule that diverge.)
• Actually, can strengthen this:– Allow some history-dependence– Allow randomness in reaction functions
Revisiting Our Example
(5,4)(5,4) (1,1)(1,1)
(0,0)(0,0) (4,5)(4,5)
Bach
Stravinsky
Bach Stravinsky
A Few Words About the Proof
• Inspired by approach to FLP result on impossibility of resilient consensus
Applications
• Interdomain routing
• Congestion control
• Best-reply dynamics in general games
• Diffusion of technologies in social networks
• Asynchronous circuits
• …
Communication Complexity
Theorem: Determining whether a system of n nodes, each with two actions, is convergent may require Ω(2n) bits.– Even if all reaction functions are deterministic,
and do not depend on history or own action
• Uses a reduction from SET DISJOINTNESS.– Constructed system has a unique stable state
Computational Complexity
Theorem: Determining whether a system of n nodes, each with deterministic and historyless reaction function, is convergent is PSPACE-complete.
• So, difficult even if the reaction functions are succinctly represented (so that they could be transmitted quickly)
• Under complexity assumptions, no short witnesses (in general) of being convergent
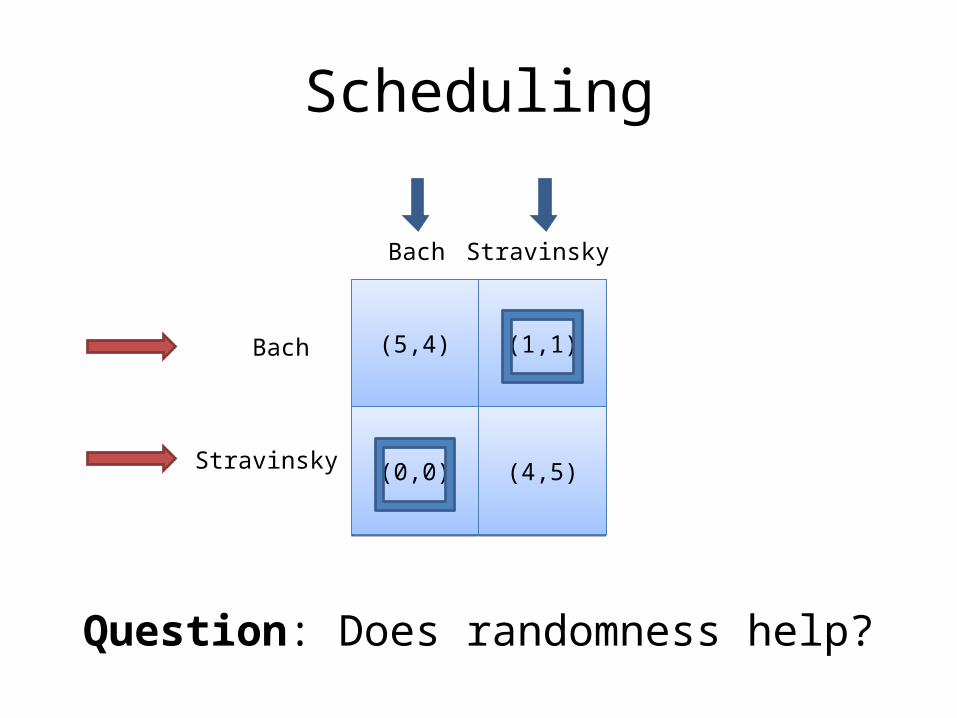
Scheduling
Question: Does randomness help?
(5,4)(5,4) (1,1)(1,1)
(0,0)(0,0) (4,5)(4,5)
Bach
Stravinsky
Bach Stravinsky
Scheduling
Question: Does randomness help?
Answer: No. Divergence may not only be possible, but overwhelmingly likely.
• Issues of r-fairness
Open Questions
• What are the convergence guarantees and impossibility results– For other heuristics– For other notions of convergence– For other notions of equilibrium
• We’ve taken first steps in the context of regret-minimizing dynamics
Other Open Questions
• Variations in information– Outdated information– Knowledge only of own utility function (uncoupled
dynamics)
• Lots of others
Summary
• Simple behaviors show up in lots of settings– Important to understand dynamic behavior when
asynchrony is allowed
• Initial results on the impossibility of guaranteeing convergence
• Lots of open questions– What can we say about the dynamic behavior in