Division of Engineering and Applied Sciences DIMACS-04 Iterative Timing Recovery Aleksandar Kavčić Division of Engineering and Applied Sciences Harvard University based on a tutorial by Barry, Kavčić, McLaughlin, Nayak & Zeng And on research by Motwani and Kavčić
Transcript
Division of Engineering and Applied Sciences
DIMACS-04
Iterative Timing Recovery
Aleksandar Kavčić
Division of Engineering and Applied Sciences
Harvard University
based on a tutorial by
Barry, Kavčić, McLaughlin, Nayak & Zeng
And on research by
Motwani and Kavčić
Division of Engineering and Applied Sciences
slide 2
Outline
• Motivation• Timing model• Conventional timing recovery• Simple iterative timing recovery• Joint timing and intersymbol interference trellis• Soft decision algorithm• Performance results• Conclusion• Future challenge: capacity of channels with
synchronization error
Division of Engineering and Applied Sciences
slide 3
Motivation
• In most communications (decoding) scenarios, we assume perfect timing recovery
• This assumption breaks down, particularly at low signal-to-noise ratios (SNRs)
• But, turbo-like codes work exactly at these SNRs
• Need to take timing uncertainty into account
Division of Engineering and Applied Sciences
slide 4
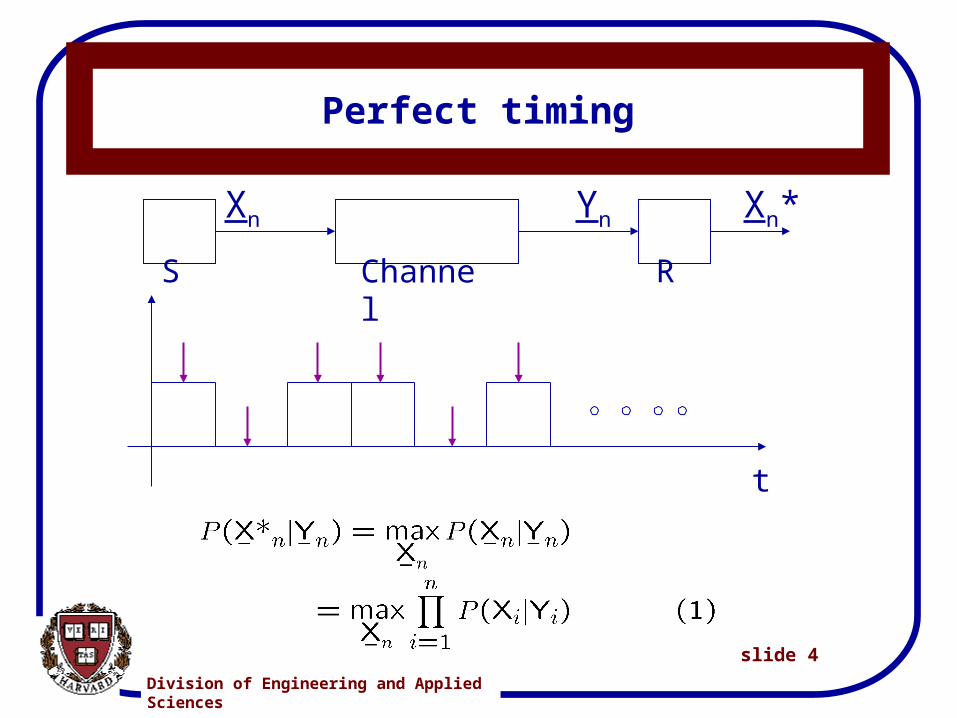
t
ChannelXn Yn S R
Xn*
Perfect timing
Division of Engineering and Applied Sciences
slide 5
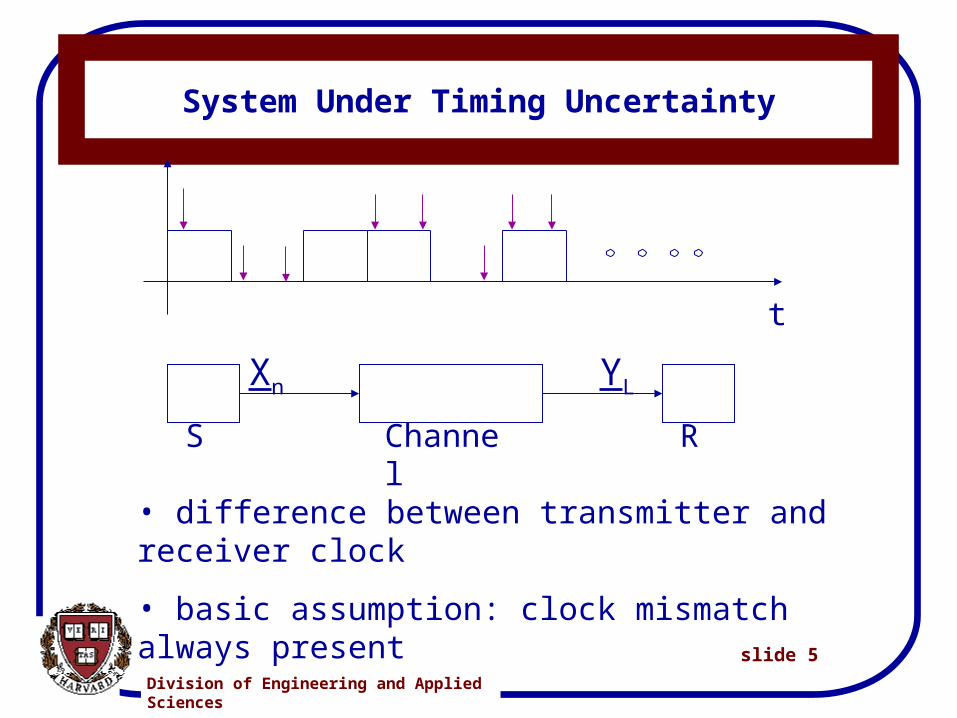
System Under Timing Uncertainty
t
ChannelXn YL S R
• difference between transmitter and receiver clock
• basic assumption: clock mismatch always present
Division of Engineering and Applied Sciences
slide 6
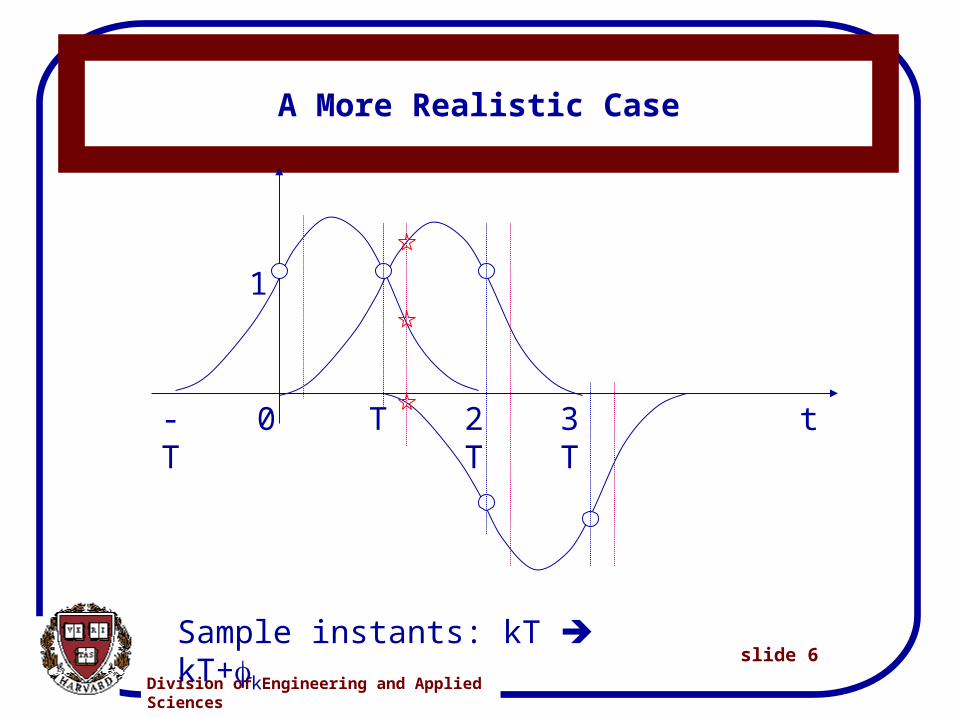
A More Realistic Case
0-T T 2T 3T t
1
Sample instants: kT kT+k
Division of Engineering and Applied Sciences
slide 7
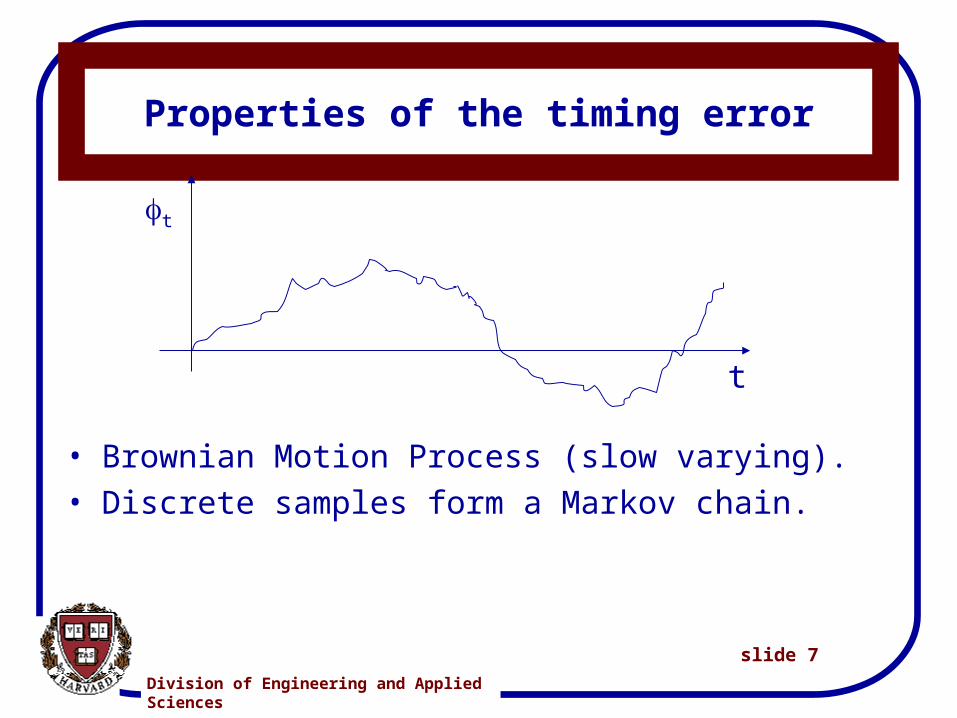
Properties of the timing error
• Brownian Motion Process (slow varying).
• Discrete samples form a Markov chain.
t
t
Division of Engineering and Applied Sciences
slide 8
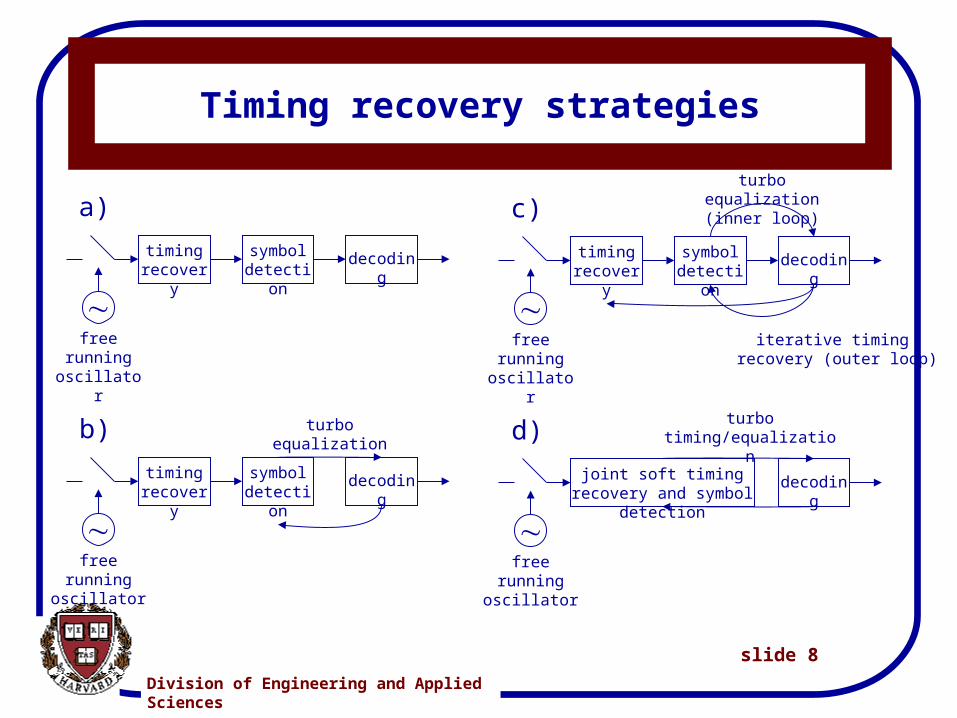
Timing recovery strategies
timingrecovery
symboldetection
decoding
timingrecovery
symboldetection
decoding
free runningoscillator
free runningoscillator
turbo equalization
timingrecovery
symboldetection
decoding
joint soft timing recovery and symbol detection
decoding
free runningoscillator
free runningoscillator
turbo timing/equalization
turbo equalization(inner loop)
iterative timing recovery (outer loop)
a)
b)
c)
d)
Division of Engineering and Applied Sciences
slide 9
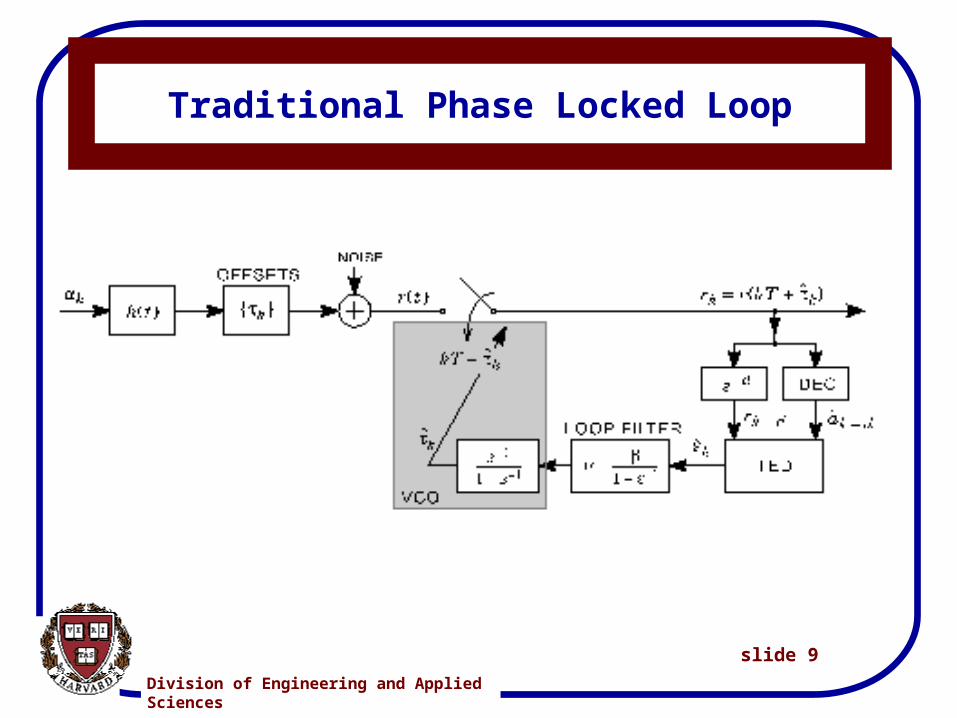
Traditional Phase Locked Loop
Division of Engineering and Applied Sciences
slide 10
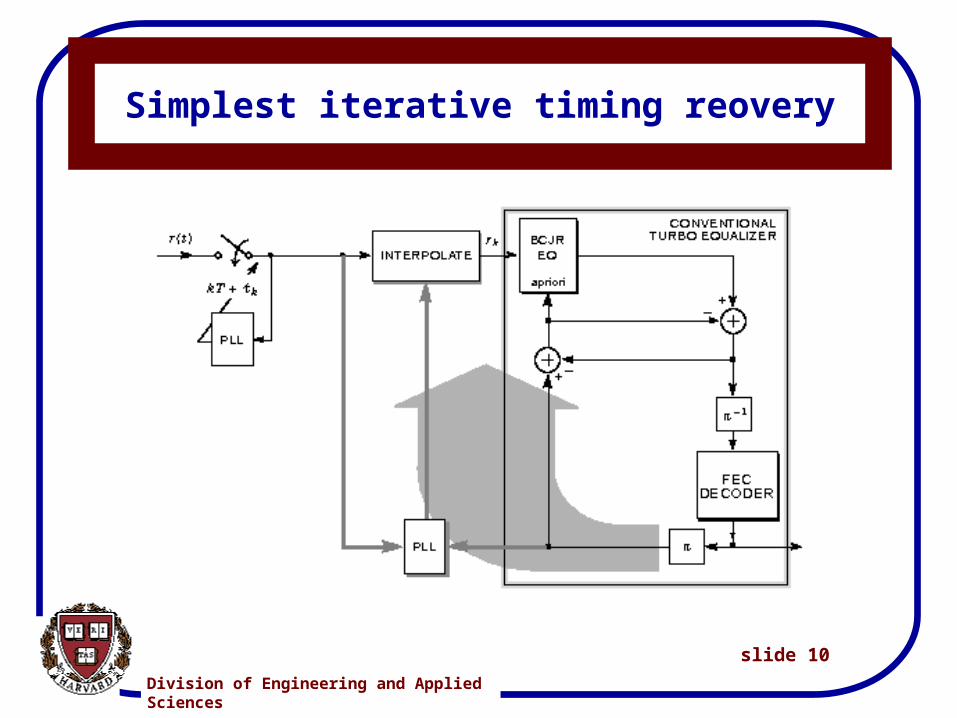
Simplest iterative timing reovery
Division of Engineering and Applied Sciences
slide 11
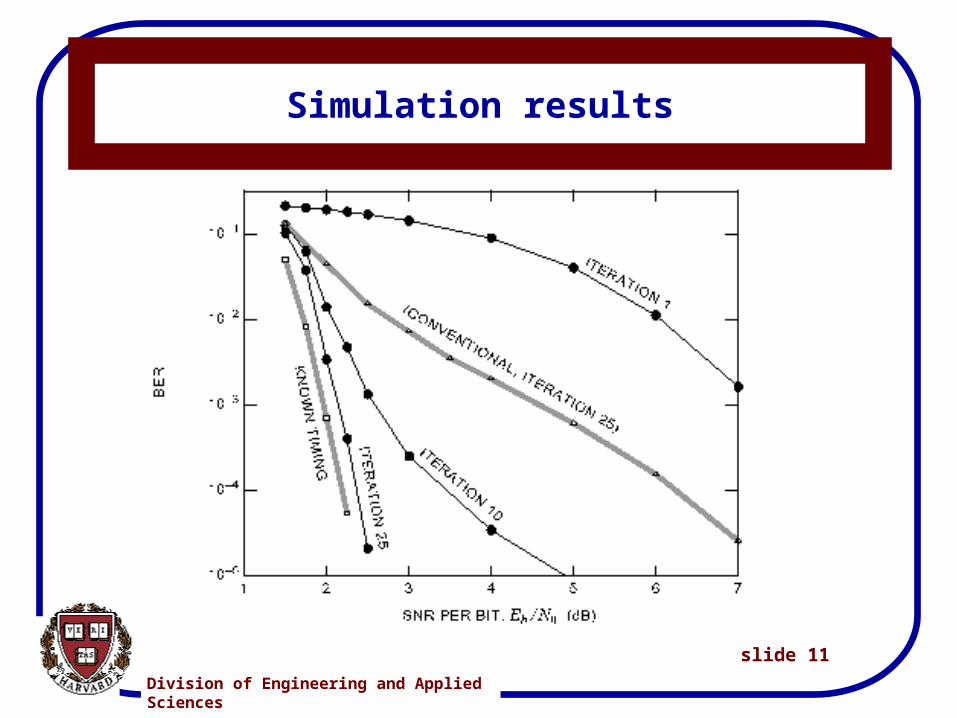
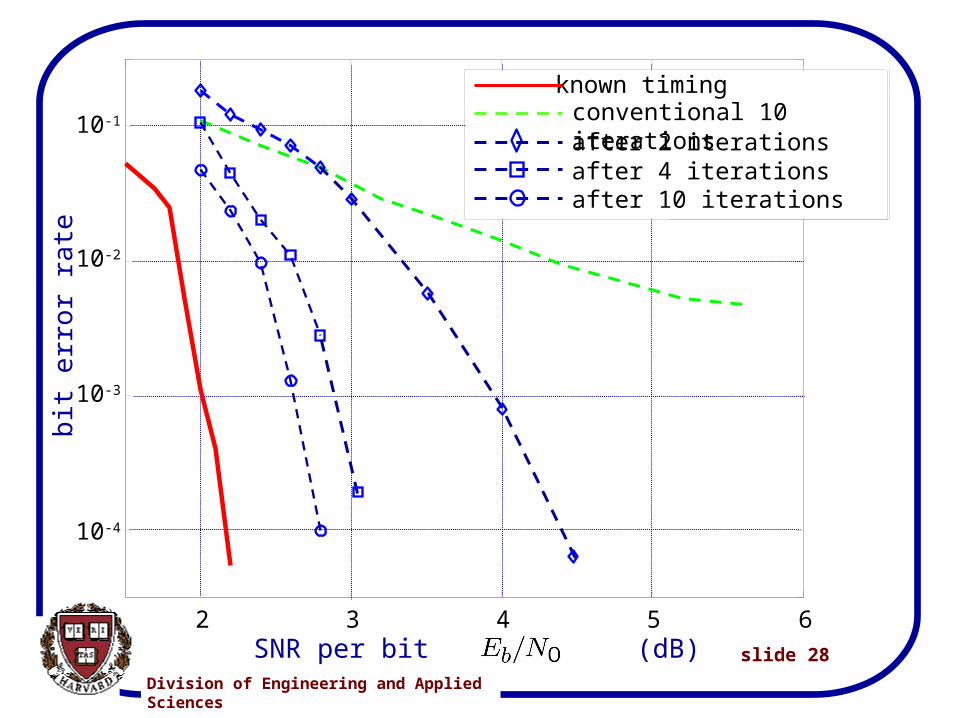
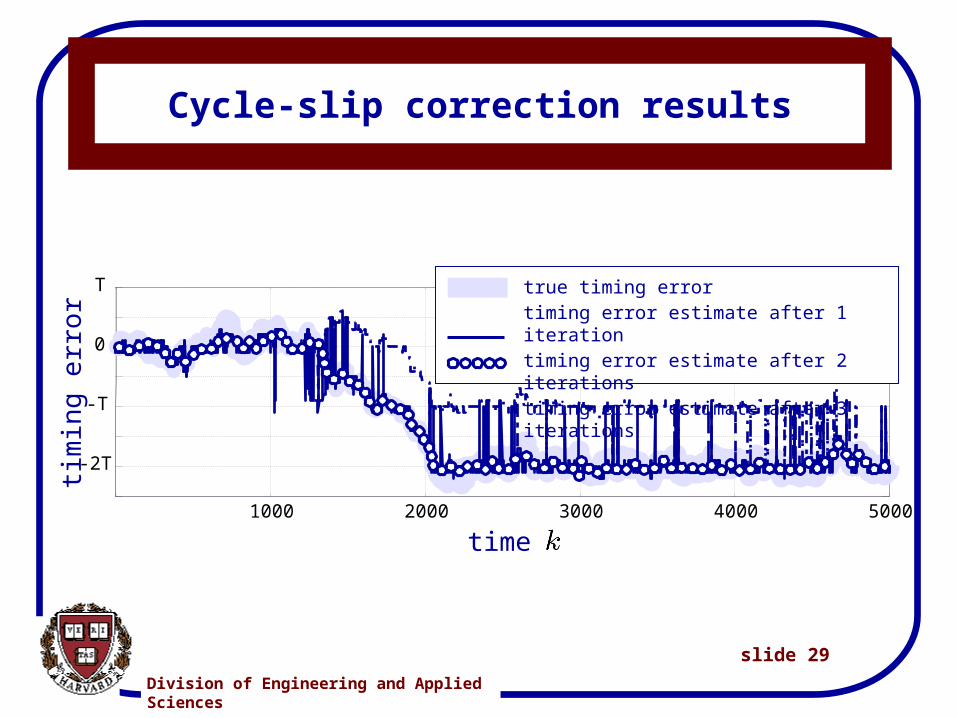
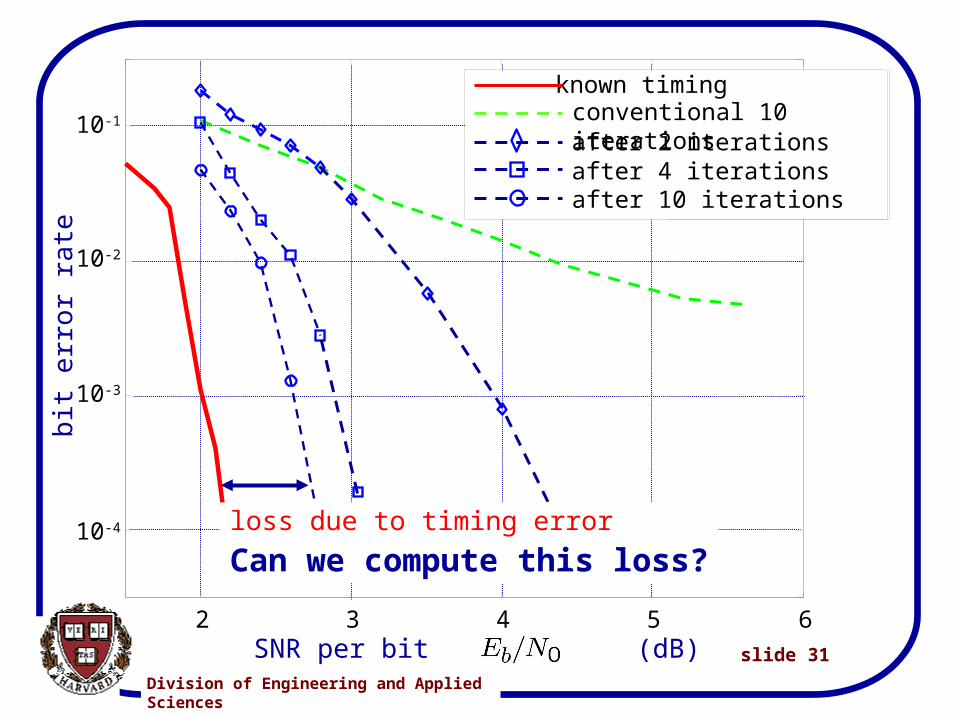
Simulation results
Division of Engineering and Applied Sciences
slide 12
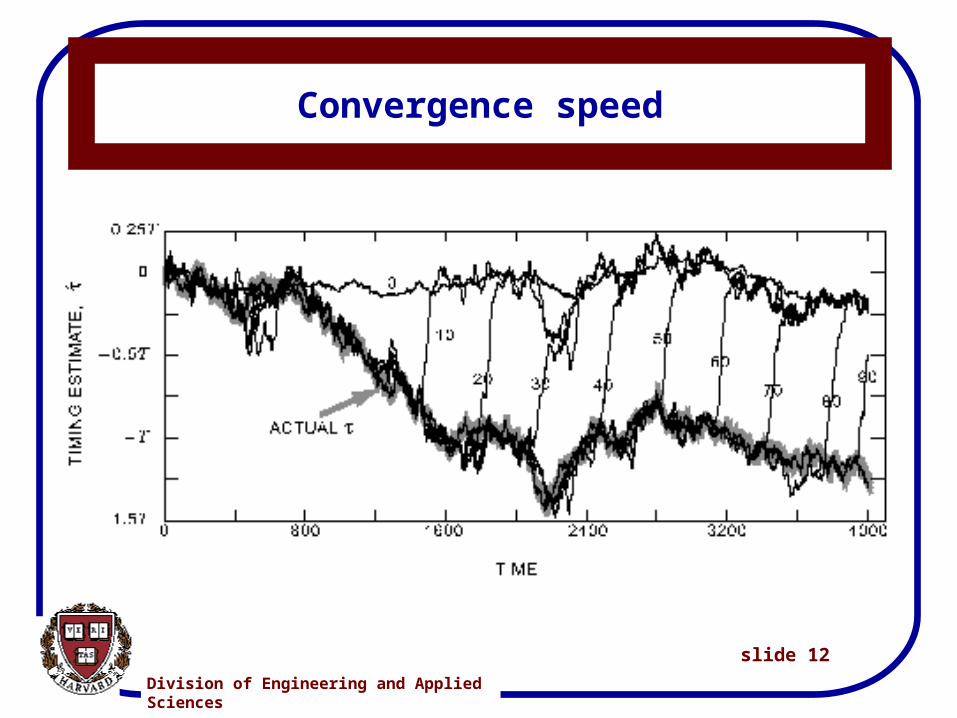
Convergence speed
Division of Engineering and Applied Sciences
slide 13
Strategy to solve the problem
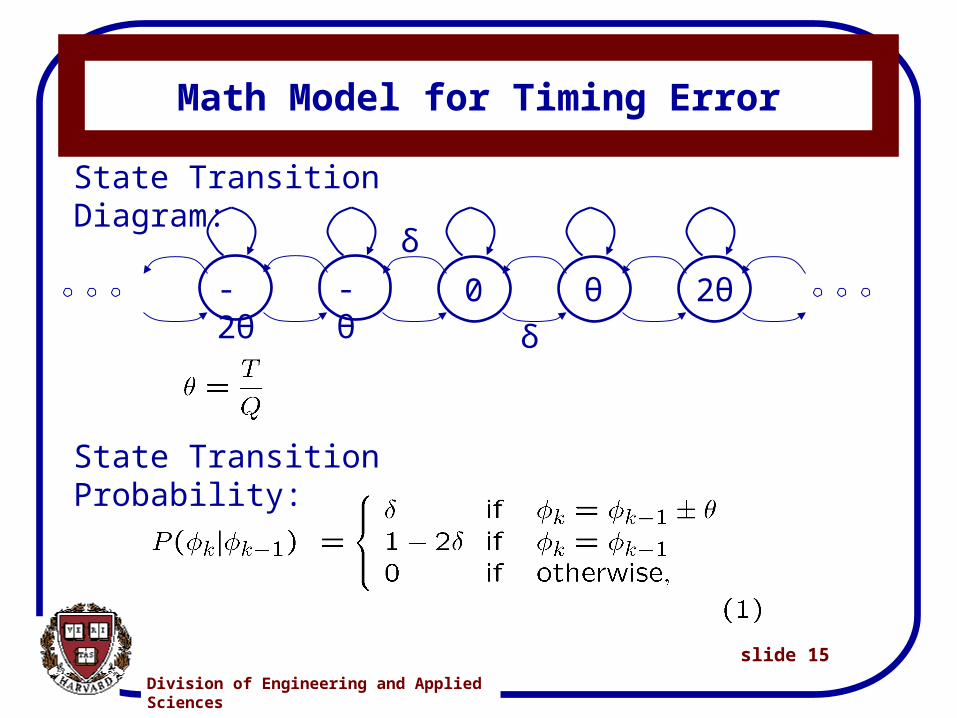
1. Set up math model for timing error (Markov).
2. Build separate stationary trellis to characterize the channel and source.
3. Form a full trellis.
4. Derive an algorithm to perform the Maximum a posteriori probability (MAP) estimation of the timing offset and the input bits
Division of Engineering and Applied Sciences
slide 14
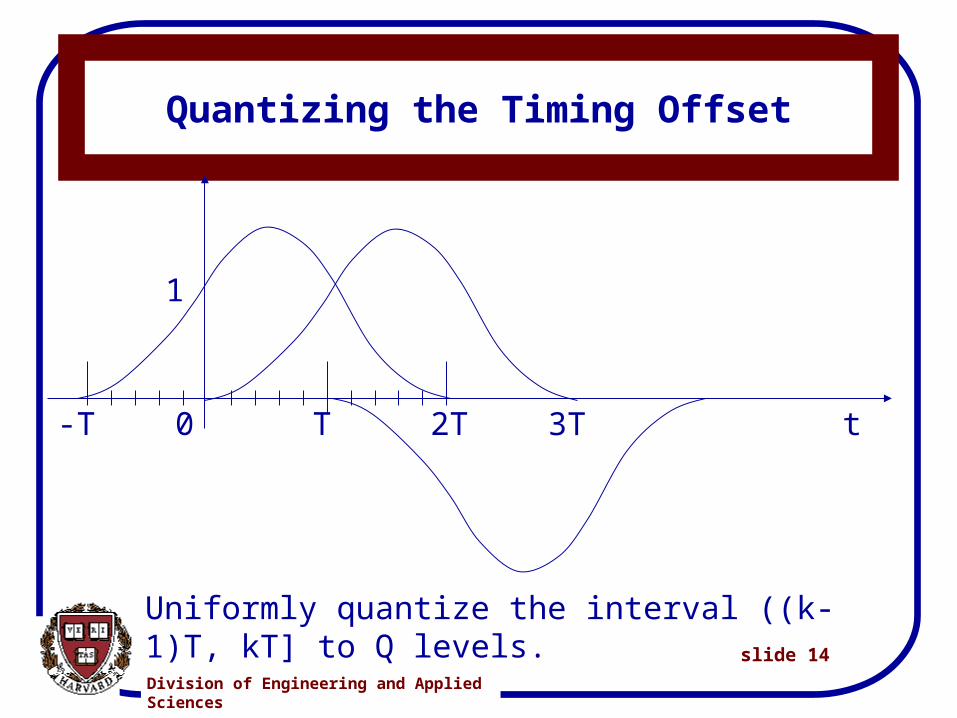
Quantizing the Timing Offset
Uniformly quantize the interval ((k-1)T, kT] to Q levels.