29
Dr. Turki F. Al-Somani VHDL synthesis and simulation – Part 3 Microcomputer Systems Design (Embedded Systems)
| Date post: | 20-Dec-2015 |
| Category: |
Documents |
| View: | 215 times |
| Download: | 0 times |

Dr. Turki F. Al-Somani
VHDL synthesis and simulation – Part 3
Microcomputer Systems Design (Embedded Systems)

VHDL Part 3 2
Finite State Machines (FSM)
All programmable logic designs can be specified in Boolean form.
However some designs are easier to conceptualize and implement using non-Boolean models.
The State Machine model is one such model.

VHDL Part 3 3
FSM
A state machine represents a system as a set of states, the transitions between them, along with the associated inputs and outputs.
So, a state machine is a particular conceptualization of a particular sequential circuit.
State machines can be used for many other things beyond logic design and computer architecture.

VHDL Part 3 4
FSM
Any Circuit with Memory Is a Finite State Machine• Even computers can be viewed as huge FSMs
Design of FSMs Involves• Defining states
• Defining transitions between states
• Optimization / minimization

VHDL Part 3 5
Definition of Terms
State Diagram
• Illustrates the form and function of a state machine. Usually drawn as a bubble-and-arrow diagram.
State
• A uniquely identifiable set of values measured at various points in a digital system.

VHDL Part 3 6
Definition of Terms
Next State
• The state to which the state machine makes the next transition, determined by the inputs present when the device is clocked.
Branch
• A change from present state to next state.

VHDL Part 3 7
Definition of Terms
Mealy Machine
• A state machine that determines its outputs from the present state and from the inputs.
Moore Machine
• A state machine that determines its outputs from the present state only.

VHDL Part 3 8
Present and Next State
For any given state, there is a finite number of possible next states.
On each clock cycle, the state machine branches to the next state.
One of the possible next states becomes the new present state, depending on the inputs present on the clock cycle.
State 2 State 3
State 1
State 0

VHDL Part 3 9
Moore Machine
• Describe Outputs as Concurrent Statements Depending on State Only
state 1 /output 1
state 2 /output 2
transitioncondition 1
transitioncondition 2

VHDL Part 3 10
Mealy Machine
• Describe Outputs as Concurrent Statements Depending on State and Inputs
state 1 state 2
transition condition 1 /output 1
transition condition 2 /output 2

VHDL Part 3 11
Moore vs. Mealy FSM (1)
Moore and Mealy FSMs Can Be Functionally Equivalent
Mealy FSM Has Richer Description and Usually Requires Smaller Number of States
• Smaller circuit area

VHDL Part 3 12
Moore vs. Mealy FSM (2)
Mealy FSM Computes Outputs as soon as Inputs Change• Mealy FSM responds one clock cycle sooner than
equivalent Moore FSM
Moore FSM Has No Combinational Path Between Inputs and Outputs• Moore FSM is less likely to have a shorter critical
path

VHDL Part 3 13
Moore FSM
Memory(register)
Transitionfunction
Outputfunction
Input: w
Present State:y_present
Next State:y_next
Output: z

VHDL Part 3 14
Mealy FSM
Memory(register)
Transitionfunction
Outputfunction
Input: w
Present State: yNext State
Output: z

VHDL Part 3 15
Moore FSM - Example
Moore FSM that Recognizes Sequence 10
S0 / 0 S1 / 0 S2 / 1
00
0
1
11
reset
Meaning of states:
S0: No elements of the sequenceobserved
S1: “1”observed
S1: “10”observed

VHDL Part 3 16
Mealy FSM - Example
Mealy FSM that Recognizes Sequence 10
S0 S1
0 / 0 1 / 0 1 / 0
0 / 1reset
Meaning of states:
S0: No elements of the sequenceobserved
S1: “1”observed

VHDL Part 3 17
Moore & Mealy FSMs – Examples
clock
input
Moore
Mealy
0 1 0 0 0
S0 S1 S2 S0 S0
S0 S1 S0 S0 S0

VHDL Part 3 18
FSMs in VHDL
• Finite State Machines Can Be Easily Described With Processes
• Synthesis Tools Understand FSM Description If Certain Rules Are Followed• State transitions should be described in a process
sensitive to clock and asynchronous reset signals only• Outputs described as concurrent statements outside the
process

VHDL Part 3 19
State Encoding Problem
State Encoding Can Have a Big Influence on Optimality of the FSM Implementation• No methods other than checking all possible encodings
are known to produce optimal circuit
• Feasible for small circuits only
Using Enumerated Types for States in VHDL Leaves Encoding Problem for Synthesis Tool

VHDL Part 3 20
Types of State Encodings
Binary (Sequential) – States Encoded as Consecutive Binary Numbers• Small number of used flip-flops
• Potentially complex transition functions leading to slow implementations
One-Hot – Only One Bit Is Active• Number of used flip-flops as big as number of states
• Simple and fast transition functions
• Preferable coding technique in FPGAs

VHDL Part 3 21
Types of State Encodings
State Binary Code One-Hot CodeS0 000 10000000
S1 001 01000000
S2 010 00100000
S3 011 00010000
S4 100 00001000
S5 101 00000100
S6 110 00000010
S7 111 00000001

VHDL Part 3 22
RTL Design Components
DatapathCircuit
ControlCircuit
Data Inputs
Data Outputs
Control Inputs

VHDL Part 3 23
Datapath Circuit
Provides All Necessary Resources and Interconnects Among Them to Perform Specified Task
Examples of Resources
• Adders, Multipliers, Registers, Memories, etc.

VHDL Part 3 24
Control Circuit
Controls Data Movements in Operational Circuit by Switching Multiplexers and Enabling or Disabling Resources
Follows Some ‘Program’ or Schedule Usually Implemented as FSM

VHDL Part 3 25
Example
Consider the following algorithm that gives the maximum of two numbers.
0: int x, y, z;1: while (1) {2: while (!start);3: x = A; 4: y = B;5: if (x >= y)6: z = x; else7: z = y; }
VHDL Part 3 26
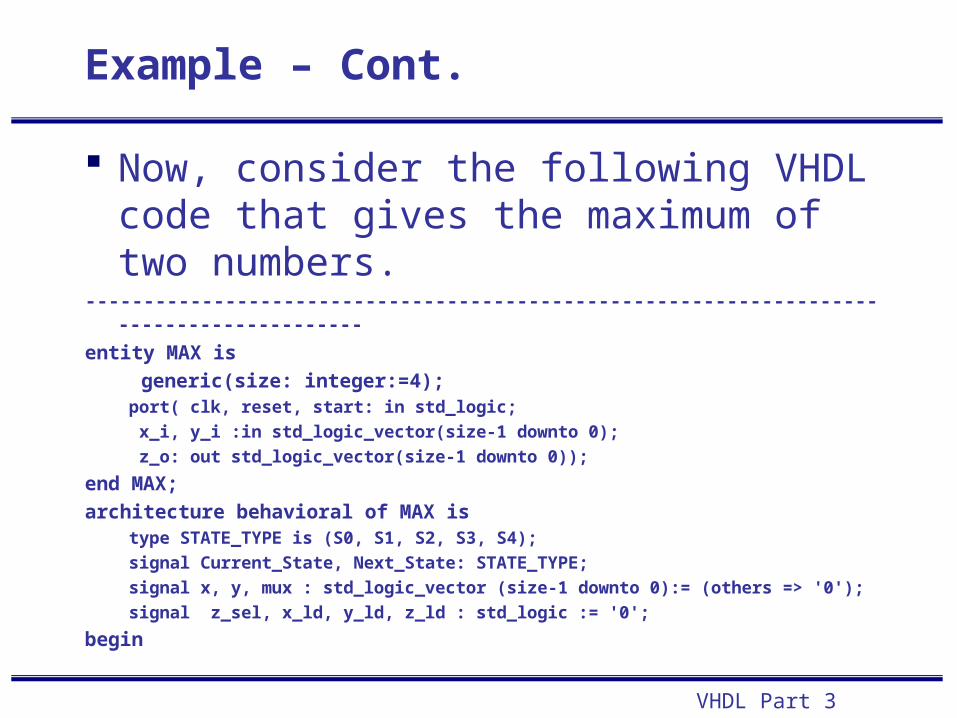
Example – Cont.
Now, consider the following VHDL code that gives the maximum of two numbers.
-----------------------------------------------------------------------------------------
entity MAX is
generic(size: integer:=4); port( clk, reset, start: in std_logic;
x_i, y_i :in std_logic_vector(size-1 downto 0);
z_o: out std_logic_vector(size-1 downto 0));
end MAX;
architecture behavioral of MAX istype STATE_TYPE is (S0, S1, S2, S3, S4);
signal Current_State, Next_State: STATE_TYPE;
signal x, y, mux : std_logic_vector (size-1 downto 0):= (others => '0');
signal z_sel, x_ld, y_ld, z_ld : std_logic := '0';
begin

VHDL Part 3 27
Example – Cont.
-----------------------------------------------Reg_x: process (CLK)begin if (CLK'event and CLK='1') then if reset='1' then
x <= (others => '0'); else
if (x_ld='1') then x <= x_i;end if;
end if; end if;end process;-----------------------------------------------Reg_y: process (CLK)begin if (CLK'event and CLK='1') then if reset='1' then
y <= (others => '0'); else
if (y_ld='1') then y <= y_i;end if;
end if; end if;end process;-----------------------------------------------
-----------------------------------------------Reg_z_o:process (CLK)begin if (CLK'event and CLK='1') then if reset='1' then
z_o <= (others => '0'); else
if (z_ld='1') then z_o <= mux;
end if; end if; end if;end process;-----------------------------------------------
Multiplexer: process (x, y, z_sel)begin
if (z_sel='0') thenmux <= x;
elsif (z_sel='1') thenmux <= y;
end if;end process;-----------------------------------------------

VHDL Part 3 28
Example – Cont.
-----------------------------------------------SYNC_PROC: process (CLK, RESET)begin if (RESET='1') then Current_State <= S0; elsif (CLK'event and CLK = '1') then Current_State <= Next_State; end if;end process;-----------------------------------------------
----------------------------------------------- COMB_PROC: process (Current_State, start, x, y, z_sel)begin case Current_State is -------------------------- when S0 => -- idle if (start='1') then Next_State <= S1; else Next_State <= S0; end if; -------------------------- when S1 => -- x = x_i & y = y_i x_ld <= '1'; y_ld <= '1'; z_ld <= '0' Next_State <= S2; -------------------------- when S2 => -- x ≥ y x_ld <= '0'; y_ld <= '0'; if (x >= y ) then Next_State <= S3; else Next_State <= S4; end if; -------------------------- when S3 => -- z = x z_sel <= '0'; z_ld<=’1’; Next_State <= S0; -------------------------- when S4 => -- z = y z_sel <= '1'; z_ld<=’1’; Next_State <= S0; end case;end process;----------------------------------------------

VHDL Part 3 29
Now, What’s Next ?!

















