IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 21, NO. 4, JULY 2006 1013
Dynamic Control and Performance of a UnifiedPower Flow Controller for Stabilizing
an AC Transmission SystemHideaki Fujita , Member, IEEE , Hirofumi Akagi , Fellow, IEEE , and Yasuhiro Watanabe
Abstract—This paper presents dynamic control and perfor-mance of a unified power flow controller (UPFC) intended forinstallation on a transmission system consisting of two sets of three-phase transmission lines in parallel. When no UPFC isinstalled, interruption of either three-phase line due to a faultreduces an active power flow to half, because the line impedancebecomes double before the interruption. Installing the UPFCmakes it possible to control an amount of active power flowingthrough the transmission system. The validity of the theoreticalanalysis developed in this paper is verified by experiments using a10-kVA laboratory setup, as well as a computer simulation.
Index Terms—Line interruption, power swings, transmissionsystems, unified power flow controller (UPFC).
I. INTRODUCTION
THE unified power flow controller (UPFC) [1]–[3], which
is one of the most promising devices in the FACTS con-
cept, has been researched and put into practical use. The Amer-
ican Electric Power (AEP) company has built and installed a
160-MVA UPFC at the Inez substation in eastern Kentucky for
the first time in the world [4], [5]. The UPFC consists of com-bined series and shunt devices, and the dc terminals which are
connected to a common dc-link capacitor. The series device
controls active power flow from the sending to the receiving
end by means of adjusting the phase angle of the output voltage.
On the other hand, the shunt device performs regulation of the
dc-link voltage as well as control of reactive power. The UPFC
realizes power flow control, stability improvement, and so on.
Damping performance against the so-called “power swings”
is essential to improving the sending capacity of a power trans-
mission system. The power swings are low-frequency oscilla-
tions of active and reactive powers, which are caused by res-
onance between a line inductance and a moment of inertia in
synchronous generators. The oscillating frequency of the power
swings is usually in a range from 0.3 to 2 Hz. Thus, a conven-
tional UPFC for the purpose of damping out the power swings
is designed to have a response time as slow as about 100 ms in
power flow control. Line-to-line and line-to-ground faults may
cause a considerable variation in power flow as fast as 10 ms.
Manuscript received June 17, 2004; revised March 24, 2005. Recommendedby Associate Editor V. Staudt.
FUJITA et al.: DYNAMIC CONTROL AND PERFORMANCE OF A UNIFIED POWER FLOW CONTROLLER 1019
Fig. 9. Simulated waveforms when the advanced control method is applied.
Fig. 10. Experimental waveforms when the advanced control method isapplied.
A practical system may show a good agreement with the simu-
lation results, because a practical line breaker has a very small
resistance.
B. UPFC With the Cross-Coupling Control Method
Experimental and simulation results using the cross-coupling
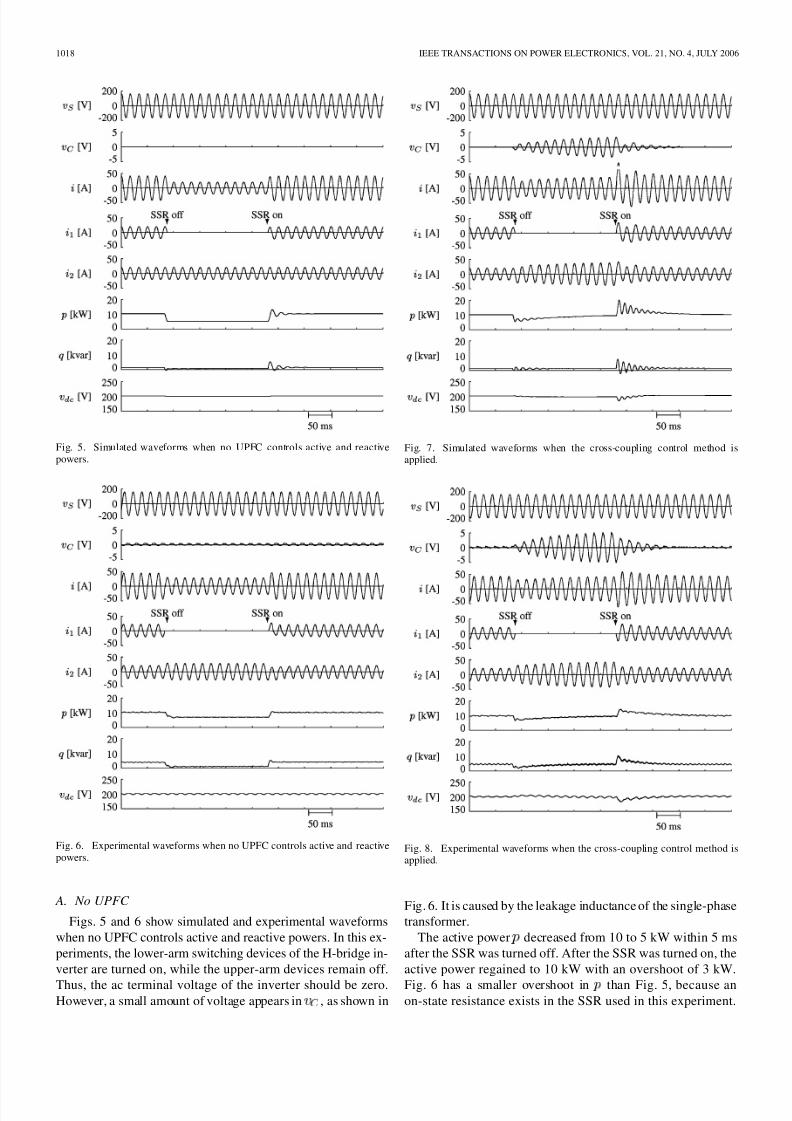
control are shown in Figs. 7 and 8, respectively. The activepower decreases to 5 kW after the SSR was turned off similarly
to the case of no UPFC, because and were a small gain
of 0.05 V/A. After that, the active power gradually increased to
10 kW by the integralgains. A large amount of overshoot and os-
cillations appeared in the active power and reactive power when
turning the SSR on, because the integral gains could not respond
to the rapid change of the line impedance. While active power in
Fig. 8 had almost no oscillation, a large amount of oscillationsappear in Fig. 7. In the simulation, any resistor is considered in
SSR, so that large oscillations appear in Fig. 7.
C. UPFC With the Advanced Control Method
Figs. 9 and 10 show simulated and experimental waveforms
when applying the advanced control. The active power was kept
as 10 kW during the fault, because the gains and were
set to 0.5 V/A, which is ten times as large as that in Figs. 7 and
8. Since the gain has the capability of damping the active
and reactive power oscillations, no overshoot nor oscillations
appeared in the active and reactive power. These results reveal
that the advanced control makes it possible to significantly im-
prove stability of transmission systems.
VIII. CONCLUSION
This paper has presented dynamic control and performance
of a UPFC under a fault condition in a two-parallel three-phase
transmission system. The transient analysis clarifies that a line
interruption generally causes a transition in the active power as
fast as 2–3 ms. Thus, a conventional UPFC with a response as
slow as100ms has dif ficulty in suppressing the power variations
caused by the faults. Moreover, a conventional UPFC may cause
an overcurrent after finishing the fault, due to the slow response
of the integral gains in the control loop for the activeand reactive
power. The advanced control in this paper shows good transientperformance without any overshoot or oscillation. The advanced
control may contribute not only to achieving fast power flow
control but also to improvement of stabilizing the transmission
systems.
REFERENCES
[1] L. Gyugyi, “Unified power-flow control concept for flexible ac trans-mission systems,” Proc. Inst. Elect. Eng. C , vol. 139, pp. 323–331, Jul.1992.
[2] L. Gyugyi, C. D. Schauder, S. L. Williams, T. R. Rietman, D. R. Torg-erson,and A. Edris, “Theunified power flowcontroller: a newapproachto power transmission control,” IEEE Trans. Power Del., vol. 10, no.2, pp. 1085–1097, Oct. 1995.
[3] N. G. Hingorani and L. Gyugyi , UnderStanding FACTS: Concept and
Technology of FlexibleAC Transmission Systems. Piscataway, NJ:IEEE Press, 2000.
[4] C. Schauder, E. Stacey, M. Lund, L. Gyugyi, L. Kovalsky, A. Keri, A.Mehraban, and A. Edris, “AEP UPFC project: Installation, commis-sioning and operation of the /spl plusmn/160 MVA STATCOM (phase
I),” IEEE Trans. Power Del., vol. 13, no. 4, pp. 1530–1535, Nov. 1998.[5] B. A. Renz, A. Keri, A. S. Mehraban, C. Schauder, E. Stacey, L. Ko-
valsky, L. Gyugyi, and A. Edris, “AEP unified power flow controllerperformance,” IEEE Trans. Power Del., vol. 14, no. 4, pp. 1374–1381,Nov. 1999.
[6] B.S. RigbyandR. G.Harley, “An improved controlscheme for a seriescapacitive reactance compensator based on a voltage source inverter,”in Proc. IEEE/IAS Annu. Meeting, 1996, pp. 870–877.
[7] Q. Yu, S. D. Round, L. E. Norum, and T. M. Undeland, “Dynamiccontrol ofa unified power flow controller,” in Proc. IEEE/PELS PES’96 Conf., 1996, pp. 508–514.
[8] Y. Jiang and A. Ekstrom, “Optimal controller for the combinationsystem of a UPFC and conventional series capacitors,” in Proc. EPE’97 , 1997, vol. 1, pp. 372–337.
7/30/2019 Dynamic Control and Performance of a Unified06
1020 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 21, NO. 4, JULY 2006
[9] Y. Chen, B. Mwinyiwiwa, Z. Wolanski, and B. T. Ooi, “Unified powerflow controller (UPFC) based on chopper stabilized multilevel con-verter,” in Proc. IEEE/PELS PESC ’97 Conf., 1997, pp. 331–337.
[10] L. Gyugyi, C. D. Schauder, and K. K. Sen, “Static synchronous se-ries compensator: A solid-state approach to the series compensationof transmission lines,” IEEE Trans. Power Del., vol. 12, no. 1, pp.406–413, Feb. 1997.
[11] L. Gyugyi, C. D. Schauder, and K. K. Sen, “Improving power system
dynamics by series-connected FACTS device,” IEEE Trans. Power Del., vol. 12, no. 4, pp. 1635–1641, Nov. 1997.[12] B. T. Ooi, M. Kazerani, R. Marceau, and Z. Wolanski, “Mid-point
siting of FACTS devicein transmissionlines,” IEEE Trans. Power Del.,vol. 12, no. 4, pp. 1717–1722, Nov. 1997.
[13] H. Fujita, Y. Watanabe, and H. Akagi, “Control and analysis of a uni-fied power flow controller,” IEEE Trans. Power Electron., vol. 14, no.6, pp. 1021–1027, Nov. 1999.
[14] H. Fujita, Y. Watanabe, and H. Akagi, “Transient analysis of a unifiedpower flow controller and its application to design of the DC-link ca-pacitor,” IEEE Trans. Power Electron., vol.16,no.5, pp. 735–740,Sep.2001.
[15] H. Fujita, S. Tominaga, and H. Akagi, “Analysis and design of a dcvoltage-controlled static var compensator using quad-series voltage-source inverters,” IEEE Trans. Ind. Appl., vol. 32, no. 4, pp. 970–978,Jul./Aug. 1996.
Hideaki Fujita (M’91) received the B.S. and M.S.degrees in electrical engineering from the NagaokaUniversity of Technology, Nagaoka, Japan, in 1988and 1990, respectively.
In 1991, he became a Research Associate with theOkayama University, Okayama, Japan. Since 2002,he hasbeen an AssociateProfessorin the Departmentof Electrical Engineering, Tokyo Institute of Tech-nology, Tokyo, Japan.His research interests are static
var compensators, active power filters, and resonantconverters.
Dr. Fujita received Prize Paper Awards from the Industrial Power ConverterCommittee,IEEE Industry ApplicationsSociety, in 1990, 1995, 1998, and2003,respectively.
Hirofumi Akagi (M’87–SM’94–F’96) was bornin Okayama, Japan, in 1951. He received the B.S.degree from the Nagoya Institute of Technology,Nagoya, Japan, in 1974, and the M.S. and Ph.D.degrees from the Tokyo Institute of Technology,Tokyo, Japan, in 1976 and 1979, respectively, all inelectrical engineering.
In 1979, he joined the Nagaoka University of
Technology, Nagaoka, Japan, as an Assistant andthen Associate Professor in the Department of Electrical Engineering. In 1987, he was a Visiting
Scientist at the Massachusetts Institute of Technology (MIT), Cambridge, forten months. From 1991 to 1999, he was a Professor in the Department of Electrical Engineering, Okayama University, Okayama. From March to Augustof 1996, he was a Visiting Professor at the University of Wisconsin, Madison,and then MIT. Since January 2000, he has been a Professor in the Departmentof Electrical and Electronic Engineering, Tokyo Institute of Technology.He has published about 170 peer-reviewed journal papers, including about70 IEEE TRANSACTIONS papers and an invited Proceedings of the IEEE paper.His research interests include power conversion systems, ac motor drives,active and passive EMI filters, high-frequency resonant-inverters for inductionheating and corona discharge treatment processes, and utility applications of power electronics such as active filters, self-commutated BTB systems, andFACTS devices.
Dr. Akagi received two IEEE IAS TRANSACTIONS Prize Paper Awards in
1991 and 2004, two IEEE PELS T RANSACTIONS Prize Paper Awards in 1999and in 2003, nine IEEE IAS Committee Prize Paper Awards, the IEEE WilliamE. Newell Power Electronics Award in 2001, and the IEEE IAS OutstandingAchievement Award in 2004. He has made presentations many times as akeynote or invited speaker internationally. He was elected as a DistinguishedLecturer of the IEEE IAS and PELS for 1998–1999.
Yasuhiro Watanabe was born in Gifu, Japan,on May 16, 1972. He received the B.S. degree inelectrical engineering from Shizuoka University,Hamamatsu City, Japan, in 1995, and the M.S. andPh.D degrees from Okayama University, Okayama,Japan, in 1997 and 2000, respectively.
In 2000, he joined the National Laboratory for
High Energy Accelerator Research. Since 2001, hehas been a Research Scientist in the Japan AtomicEnergy Agency (formerly Japan Atomic EnergyResearch Institute), Ibaraki, Japan. His research
interests are magnet and magnet power supply for synchrotron accelerator.