22
Dynamics of Structures Elements of structural dynamics Roberto Tomasi 11.05.2017 Roberto Tomasi Dynamics of Structures 11.05.2017 1 / 22

Dynamics of StructuresElements of structural dynamics
Roberto Tomasi
11.05.2017
Roberto Tomasi Dynamics of Structures 11.05.2017 1 / 22

Overview
1 SDOF systemSDOF systemEquation of motionSolution of Equation of motionResponse spectrumAn example
2 MDOF SYSTEMMDOF SYSTEMSolution of Equation of motion
3 Conclusions
Roberto Tomasi Dynamics of Structures 11.05.2017 2 / 22

Some questions...
• How do structures behave during earthquakes?• How can the seismic loads be represented and calculated?• Can we assume structures behave in elastic range? Is it possible?
Roberto Tomasi Dynamics of Structures 11.05.2017 3 / 22

SDOF system SDOF system
SDOF system
In order to study the dynamic behavior of a structure the simplestoscillating model is considered: Singular degree of freedom – SDOFsystem
⇒
• M: mass• k: linear elastic
lateral stiffness• c: viscous damping
Roberto Tomasi Dynamics of Structures 11.05.2017 4 / 22

SDOF system Equation of motion
Equation of motion
The system consists of a mass Mon a spring (two columns) thatremains in elastic range,V = k ·u, when it oscillates undera seismic acceleration x0(t).Defining u as the relativedisplacement, the absoluteacceleration u is given by:
x(t) = x0(t) + u(t)
Application of d’Alambert’s principle of dynamic equilibrium results in theequation of motion:
Mx + c(x − x0) + k(x − x0) = 0 ⇒ Mu + cu + ku = −M x0
Roberto Tomasi Dynamics of Structures 11.05.2017 5 / 22
SDOF system Equation of motion
Equation of motion
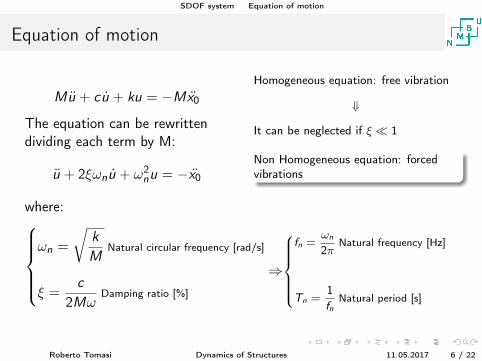
Mu + cu + ku = −Mx0
The equation can be rewrittendividing each term by M:
u + 2ξωnu + ω2nu = −x0
where:ωn =
√k
MNatural circular frequency [rad/s]
⇒ξ =
c
2MωDamping ratio [%]
Homogeneous equation: free vibration
⇓
It can be neglected if ξ � 1
Non Homogeneous equation: forcedvibrations
fn =
ωn
2πNatural frequency [Hz]
Tn =1fn
Natural period [s]
Roberto Tomasi Dynamics of Structures 11.05.2017 6 / 22
SDOF system Solution of Equation of motion
Solution of equation of motion
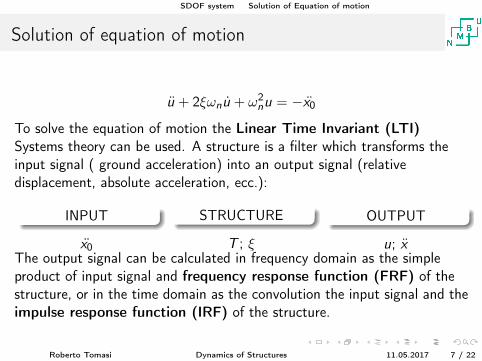
u + 2ξωnu + ω2nu = −x0
To solve the equation of motion the Linear Time Invariant (LTI)Systems theory can be used. A structure is a filter which transforms theinput signal ( ground acceleration) into an output signal (relativedisplacement, absolute acceleration, ecc.):
INPUT
x0
STRUCTURE
T ; ξ
OUTPUT
u; xThe output signal can be calculated in frequency domain as the simpleproduct of input signal and frequency response function (FRF) of thestructure, or in the time domain as the convolution the input signal and theimpulse response function (IRF) of the structure.
Roberto Tomasi Dynamics of Structures 11.05.2017 7 / 22

SDOF system Solution of Equation of motion
Solution of equation of motion in the time domain
In the time domain the convolution between the input signal and IIR of astructure is called Duhamel’s integral.
u(t) =1ωd
∫ t
0x0(τ)e
−ξωn(t−τ) sin(ωd(t − τ))dτ
where ωd = ωn
√1− ξ2
After calculating the relative displacement, the relative velocity and theabsolute acceleration can be obtained.
u(t) =du(t)
dtx(t) = −ω2
nu(t)− 2ωnξu(t)
Roberto Tomasi Dynamics of Structures 11.05.2017 8 / 22

SDOF system Solution of Equation of motion
Internal force and pseudo acceleration
Once we know the relativedisplacement in the time domainu(t) it’s easy to calculate theinternal force F (t) as:
F (t) = ku(t) = ω2du(t) = ma(t)
a(t) is the pseudo acceleration
The pseudo acceleration is not the absolute acceleration!!!
x = −a(t)− 2ωnξu
The seismic effects on the structure are calculated in each instant as astatic force F(t). In order to design or to assess a structure, we just needthe peak force value.
Fmax = max |F (t)| = k ·max |u(t)| = m ·max |a(t)|Roberto Tomasi Dynamics of Structures 11.05.2017 9 / 22

SDOF system Solution of Equation of motion
Internal force and pseudo acceleration
Fmax = max |F (t)| = k ·max |u(t)| = m ·max |a(t)|
We just need the maximum value of displacement or pseudo-acceleration.
⇓They depend on the dynamic properties of system (T ,ξ)
⇓
Given a ground acceleration, changing the natural period of the system andsolving each time the Duhamel’s integral, we can calculated the maximumrelative displacement or maximum pseudo-acceleration.
Response Spectrum S(T , ξ)
Roberto Tomasi Dynamics of Structures 11.05.2017 10 / 22

SDOF system Response spectrum
How can the response spectrum be calculated?
T1 = 0, 25s
⇓{u1,max
a1,max
T2 = 0, 5s
⇓{u2,max
a2,max
T3 = 1, 0s
⇓{u3,max
a3,max
ui,max = SDe(Ti ) DisplacementResponse Spectrum
ai,max = SAe(Ti ) Pseudo AccelerationResponse Spectrum
Roberto Tomasi Dynamics of Structures 11.05.2017 11 / 22

SDOF system Response spectrum
Pseudo-Acceleration Response Spectrum SA,e(T )
• For Rigid structures (T = 0) Sa is equal to the maximum groundacceleration
• For Flexible structures (T →∞) Sa tends to zero• If the structure is characterized by a natural frequency similar to theground motion one, the pseudo-acceleration is higher than PGA. Theinput signal is amplified!!!Roberto Tomasi Dynamics of Structures 11.05.2017 12 / 22

SDOF system An example
An example
Let’s suppose a structure which can be modelled as a 1-DOF elastic andlinear system with mass M equal to 4000 tons ( 400 kN) and K=630kN/mm. How can we calculate the maximum inertia force acting on thesystem if El Centro Earthquake occurs?
1 Calculating the natural period
T = 2π√
m
k= 2π
√4000 · 103 kg630 · 106N/m
= 0, 5 s
2 Deriving the maximum pseudoacceleration for the elastic spectrumS(T ): 1.05g
3 Calculating the maximum force as:Fmax = m · SA,e(T ) = 400 · 1, 05 = 420 kN
Roberto Tomasi Dynamics of Structures 11.05.2017 13 / 22

SDOF system An example
Which ground motion do we select for the design of astructure?
We should calculate the maximum force for a lot of ground motions, usingtheir response spectrum. For this reason European and National Standardsgive elastic response spectrum for each site depending on the ground type.It has been calculated by means of a probabilistic analysis considering a lotof real ground motions.
⇒
The standard response spectrum can be considered as the envelope of a lotof ground motion.
Roberto Tomasi Dynamics of Structures 11.05.2017 14 / 22

MDOF SYSTEM MDOF SYSTEM
MDOF Systems
For most of structures the SDOF system can be considered as not accurate. We need tomodel the structure as a Multi degree of freedom M-DOF.
⇒
The number of degree of freedom for most ofbuildings is equal to 3 x number of storeys. Infact we can assume the masses concentrated ineach floor which, if it is can be considered asinfinitely rigid, is characterized by 3 degrees offreedom: 2 translation degrees of freedom (x,y)
and 1 rotational degree of freedom.
The equation of motion can be written in matrix form:
[M]{u(t)
}+ [C ]
{u(t)
}+ [K ]
{u(t)
}= −[M]
{1}x0(t)
[M] = mass matrix; [C ] = damping matrix; [K ] = stiffness matrix
{u(t)}; {u(t)}; {u(t)}; {1} = relative acceleration, velocity, displacement and influence nx1 vectors
Roberto Tomasi Dynamics of Structures 11.05.2017 15 / 22

MDOF SYSTEM Solution of Equation of motion
Solution of Equation of motion
[M]{u(t)
}+ [C ]
{u(t)
}+ [K ]
{u(t)
}= −[M]
{1}x0(t)
The equation represents a coupled system of second-order differentialequation in which the independent variable is the time t and thedependent variables are the relative displacements. By coupled, it ismeant that two or more of the dependent variables appear in each ofthe equations of the system. The most convenient method to solve thesystem is the so called modal superposition method.
The advantage is taken of the orthogonality properties of the mode shapes of thestructure. The original equation of motion may be uncoupled by expressing thedisplacement vector as a linear combination of the structural mode shapes.{
u(t)}
= [Φ]{η(t)
}[M] = modal matrix; [C ] = generalized coordinates vector
What is a mode shape?
Roberto Tomasi Dynamics of Structures 11.05.2017 16 / 22

MDOF SYSTEM Solution of Equation of motion
What is a mode shape?
Let consider an unforced and undamped structure. The equation becomes:
[M]{u(t)
}+ [K ]
{u(t)
}= 0
The displacement vector (dependent variable of the differential equation) can beexpressed as a linear combination of n solution, given by:{
u(t)}
={
Φ}e iωt
Substituting in the equation of motion we obtain:([K ]− ω2[M]
){Φ}
= 0
which admits a solution if the determinant of the matrix is equal to zero. This means tosolve the following n order linear equation for the variable ω2.∣∣∣[K ]− ω2[M]
∣∣∣ = 0
The solution gives us the n circular natural frequency ω2 of the structure which,substituting in the previous equation, give n vectors {Φ}, called mode shapes.
Roberto Tomasi Dynamics of Structures 11.05.2017 17 / 22

MDOF SYSTEM Solution of Equation of motion
What is a mode shape?
A n-DOF system is characterized by n natural frequency (or period) and byn mode shapes. The first mode shape is associated with the highest naturalperiod.
The free vibration of the structure can be seen a linearcombination of all mode shapes.
Roberto Tomasi Dynamics of Structures 11.05.2017 18 / 22
MDOF SYSTEM Solution of Equation of motion
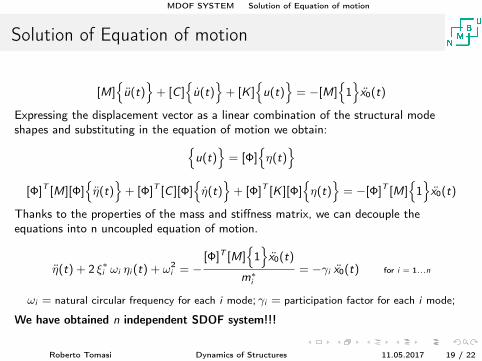
Solution of Equation of motion
[M]{u(t)
}+ [C ]
{u(t)
}+ [K ]
{u(t)
}= −[M]
{1}x0(t)
Expressing the displacement vector as a linear combination of the structural modeshapes and substituting in the equation of motion we obtain:{
u(t)}
= [Φ]{η(t)
}[Φ]T [M][Φ]
{η(t)
}+ [Φ]T [C ][Φ]
{η(t)
}+ [Φ]T [K ][Φ]
{η(t)
}= −[Φ]T [M]
{1}x0(t)
Thanks to the properties of the mass and stiffness matrix, we can decouple theequations into n uncoupled equation of motion.
η(t) + 2 ξ∗i ωi ηi (t) + ω2i = −
[Φ]T [M]{1}x0(t)
m∗i
= −γi x0(t) for i = 1...n
ωi = natural circular frequency for each i mode; γi = participation factor for each i mode;
We have obtained n independent SDOF system!!!
Roberto Tomasi Dynamics of Structures 11.05.2017 19 / 22

MDOF SYSTEM Solution of Equation of motion
Solution of Equation of motion
Each independent equation of motion of the i-th SDOF system can be solved by meansof the Duhamel’s integral as seen previously.
η(t) + 2 ξ∗i ωi ηi (t) + ω2i = −
[Φ]T [M]{1}x0(t)
m∗i
= −γi x0(t) for i = 1...n ⇒ ηi (t)
We can evaluate maximum displacement and acceleration and force for each equation bymeans of RESPONSE SPECTRUM. But how can we get the maximum displacement,acceleration and force of the structure since the solution is a linear combination of the nindependent solution? {
u(t)}
=∑i
{Φ}Ti ηi (t)
The maximum displacement of the structure is in general less than the sum of maximumdisplacement associated to each mode i . In fact modes have different frequency ofvibration and maximum displacement are not reached at the same time.
max{u(t)
}6=∑i
{Φ}Ti max(ηi (t))
Roberto Tomasi Dynamics of Structures 11.05.2017 20 / 22

MDOF SYSTEM Solution of Equation of motion
Solution of Equation of motion
In other words, one cannot consider that the maximum response of a structure is equalto the sum of the maximum response in each of its mode. Furthermore, as a responsespectrum does not provide information about the time at which each maximum occurs,it is not possible to derive an exact formula to comupute the maximum response in termsof the modal maxima. One of the first rules for the combination of modal response wasthe so called SQUARE ROOT OF THE SUM OF THE SQUARES RULE (SRSS).
max{u(t)
}=
√∑i
({Φ}Ti max(ηi (t))
)2
Roberto Tomasi Dynamics of Structures 11.05.2017 21 / 22

Conclusions
Conclusions
• A structure can be considered as a filter that modifies the inputsignal (ground motion) into an output signal (displacement,acceleration, velocity).
• Hence the response of the structure depends on the characteristics ofthe ground motion and on its dynamic behaviour (natural period anddamping). A ground motion can be very hard for somestructures but not so for some others!!!
• The response spectrum is a very useful tool to evaluate the maximumrelative displacement or maximum absolute acceleration.
• A structure can be seen as a N-DOF system, whose response can becalculated as the linear combination of N independent S-DOF systems.
Roberto Tomasi Dynamics of Structures 11.05.2017 22 / 22










![Dynamics of Structures - download.e-bookshelf.de · [Dynamique des structures, application aux ouvrages de génie civil. English] Dynamics of structures / Patrick Paultre. p. cm.](https://static.documents.pub/doc/80x56/5c8b344f09d3f298038beaaa/dynamics-of-structures-downloade-dynamique-des-structures-application.jpg)






