Effect of Cambering on the Aerodynamic Performance of 1 Heaving Airfoils 2 3 Joel E. Guerrero 4 Postdoctoral Fellow, Department of Civil, Environmental and Architectural Engineering, University of Genoa, Via 5 Montallegro 1, Genoa, Italy 16145; [email protected]. 6 7 Abstract 8 In the present work, a parametric numerical study is conducted in order to assess the effect of airfoil cambering on the 9 aerodynamic performance of rigid heaving airfoils. The incompressible Navier-Stokes equations are solved in their 10 velocity-pressure formulation using a second-order accurate in space and time finite-difference scheme. To tackle the 11 problem of moving boundaries, the governing equations are solved on structured overlapping grids. The numerical 12 simulations are performed at a Reynolds number equal to Re = 1100 and at different values of Strouhal number and reduced 13 frequency. The results obtained show that the airfoil cambering geometric parameter has a strong influence on the average 14 lift coefficient, while it has a smaller impact on the average thrust coefficient and propulsive efficiency of heaving airfoils. 15 16 Keywords: heaving airfoils, structured overlapping grids, incompressible Navier-Stokes equations. 17 18 1 Introduction 19 Flapping wings for flying and oscillating fins for swimming stand out as one of the most complex yet widespread 20 propulsion methods found in nature. Natural flyers and swimmers, which have evolved over millions of years, represent 21 one of nature’s finest locomotion experiments [1]. Recently, the engineering community (particularly the aerospace field) 22 has seen renewed interest in the low Reynolds number aero/hydro-dynamics of flapping wings and oscillating fins, and this 23 is chiefly due to the growing interest of developing Micro-Air-Vehicles (MAVs), Autonomous-Underwater-Vehicles 24 (AUVs) and more recently, Nano-Air-Vehicles (NAVs). These vehicles may use Nature evolutionary design as the 25 inspiration model to enhance or supplant traditional sources of propulsion (propellers in ships and submersibles, jet engines 26 and propellers in aircrafts and rotors in helicopters) and lift generation mechanisms (fixed wings and helicopter rotors) in 27 man-made vehicles. 28
Transcript
Effect of Cambering on the Aerodynamic Performance of 1
Heaving Airfoils 2
3
Joel E. Guerrero 4
Postdoctoral Fellow, Department of Civil, Environmental and Architectural Engineering, University of Genoa, Via 5
these two parameters are used to characterize the unsteady aerodynamics of heaving airfoils. In Eqs. (10)-(11), ah is the 108
heaving amplitude and is defined positive upwards, hf is the heaving frequency, c is the airfoil chord, t is the time and U 109
is the free stream velocity. 110
In some St ranges, it is found that a heaving airfoil can produce thrust (with the vortices in the wake arranged so as to 111
produce a reverse von Karman street) or drag (with the vortices in the wake arranged to form a von Karman street) [4]. In 112
the study of natural flyers and swimmers in cruising condition it is found that St is often within the range of 0.2 < St < 0.4; 113
with these values of St, the propulsive efficiency η is high, with an optimal St value around 0.3 [2, 15]. The St is well 114
known for characterizing the vortex dynamics and shedding behavior of unsteady flows. The reduced frequency k, can be 115
seen as a measure of the residence time of a particle (or a vortex) convecting over the airfoil chord compared to the period 116
of motion. 117
The aerodynamic performance of heaving airfoils is often measured by computing the lift coefficient lc , thrust 118
coefficient tc (which is equal to negative drag coefficient, t dc c ), input power coefficient Pc and propulsive efficiency 119
η, which are defined as follow 120
20.5l
Lc =
ρU c
, 20.5t
Tc =
ρU c
, 30.5P
Pc =
ρU c
, t
P
cη=
c (12) 121
where L is the lift force, T is the thrust force (equal to negative drag force D) and P is the instantaneous input power; which 122
can be defined as the amount of energy imparted to the airfoil to overcome the fluid forces and is equal to 123
-P t L t y t (for pure heaving motion), where y t is the vertical velocity of the airfoil. The lift and drag forces (L 124
and D respectively), are computed by integrating the viscous and pressure forces over the airfoil surface. The lift coefficient125
lc , thrust coefficient tc and input power coefficient Pc , can be averaged in time as follows
126
1 t
l l
t
c = c t dt
, 1 t
t t
t
c = c t dt
, 1 t
P P
t
c = c t dt
(13) 127
where is the period of flapping motion and is equal to 1 hf .
128
The overlapping grid system layout used to conduct this parametric study is shown in Fig. 3. In this figure, the grid 129
size of the background grid (BG) is 200 110 (in the x and y directions respectively), for the wake grid (WG) is 400 180130
(in the x and y directions respectively) and for the airfoil grid (AG), is 300 120 (on the airfoil surface and the direction 131
normal to the airfoil surface respectively), where ah is assumed to be equal to 0.3. In the case of a bigger or smaller 132
domain, the grid dimensions are scaled in order to keep the same grid spacing as for this domain. For the AG (which is an 133
hyperbolic grid and is marched a distance equal to 0.5 c from the airfoil surface), the first node normal to the airfoil 134
surface is located at a distance equal to 0.00005 c and there are up to 20 normal points clustered in the direction normal to 135
the airfoil surface (boundary layer area), mesh clustering is also used towards the leading and trailing edge, since we expect 136
the vortices to be generated and shed in these areas. This overlapping grid system provide grid independent results and was 137
chosen after conducting an extensive quantitative (force measurements) and qualitative (wake structure resolution) grid 138
refinement study [16]. 139
The initial conditions used in each heaving airfoil simulation are those of a fully converged solution of the 140
corresponding fixed airfoil case. The left boundary of the BG in Fig. 3, corresponds to an inflow boundary condition 141
ˆ(1,0), 0p nu and the top, bottom and right boundaries of the BG are outflow boundaries (basically vanishing 142
pressure gradient and velocity extrapolated from the interior points). The airfoil has no-slip boundary condition ( u 0 ). 143
The rest of the boundaries are interpolation boundaries. The Reynolds number for all the heaving airfoil numerical 144
experiments is equal to 1100. 145
The airfoils used for this parametric study are based on the standard NACA four digits series, where we simply changed 146
the maximum airfoil cambering and its position. The NACA airfoils used were the following: 0012, 2212, 2412, 2612, 147
4412, 4612 and 6612. Additionally, we also used the high lift low Reynolds number Selig S1223 airfoil. This latter airfoil 148
was chosen because of its similarities to the Seagull and Merganser wings cross-section, as observed by Liu et al. [17]. All 149
the airfoils tested have similar maximum thickness. In general, we used three different St values (in the region of 0.2 < St < 150
0.4, where the propulsive efficiency η is high [2,15]) and two different values of heaving amplitude ah , one corresponding 151
to high heaving frequencies hf (low heaving amplitudes ah ) and the other corresponding to low heaving frequencies hf 152
(high heaving amplitudes ah ). The purpose of using these two different values of ah is to study the leading edge vortex 153
(LEV) shedding and frequency dependence. The summary of results is presented in tabular form in Tables 2-4, where tc is 154
the average thrust coefficient, Pc is the average input power coefficient, is the propulsive efficiency, lc is the average 155
lift coefficient and ˆlc is the maximum lift coefficient (whose value is only given during the downstroke or power stroke). 156
Inspecting Table 2 for the case where 0.1ah (St = 0.4), and using the results of the NACA 0012 airfoil as a reference, 157
we observe that the values of tc , Pc , and ˆlc do not change much as the maximum airfoil cambering and its position are 158
modified; conversely, looking at the values of lc , we observe that the values increase as we change the maximum airfoil 159
cambering and its position, in fact, we are now producing a positive average lift coefficient lc . Examining the same table 160
and looking at the case where 0.3ah , the same observations as for the previous case also hold. Looking closely at the 161
aerodynamic quantities for the S1223 airfoil, we notice that the aerodynamic performance of this airfoil is not close to that 162
of the other airfoils; nevertheless, it still produces thrust and lift. From these results, it can be also seen that the ˆlc value is 163
higher as we move the position of the airfoil maximum thickness aft. Similar observations apply for the results presented in 164
Tables 3 and 4. From these results, we can also identify a region of drag production or very little thrust production for 165
values of St around 0.2 (Table 4) and a region of thrust production for values of St higher than 0.2 (Tables 2 and 3). 166
Let us now introduce the product t lc c , which we will use as the driving figure of merit for choosing the best airfoil for 167
any given heaving conditions. The results are shown in Table 5, where for any given heaving configuration, the biggest 168
value of the product t lc c represents the best airfoil for the configuration studied. In Table 5, the cases where St = 0.2 will 169
not be taken into consideration, as they produce no thrust or very little thrust. As it can be seen in this table, for low 170
heaving amplitudes (high heaving frequencies) and St equal to 0.3 and 0.4 the best airfoil is the Selig S1223, whereas for 171
high heaving amplitudes (low heaving frequencies) and St equal to 0.3 and 0.4 the best airfoil is the NACA 6612. The 172
product t lc c means that for the given heaving configuration; the chosen airfoil has a high acceleration rate, high climb 173
rate and high lift-to-drag ratio. 174
From the results presented, it can be also observed that very different behaviors on the aerodynamic performance can be 175
obtained between high heaving frequencies (low heaving amplitudes) and low heaving frequencies (high heaving 176
amplitudes), with a maximum propulsive efficiency value obtained at St = 0.3 for 0.1ah , whereas for 0.3ah the 177
maximum propulsive efficiency value is obtained for St = 0.4. These different behaviors are due to the leading edge 178
vortices (LEVs) shedding process. LEV separation and convection introduces a frequency dependence into the results, this 179
provides a mechanism of optimal selection of heaving frequency (in the sense of maximum propulsive efficiency), as 180
discussed by Wang [6] and Young and Lai [7]. It is worth mentioning that the results presented in [6] and [7], were 181
obtained for symmetrical airfoils. The results presented in this technical note, extend the observations presented by Wang 182
[6] and Young and Lai [7] to non-symmetrical airfoils. 183
In Fig. 4 we compare the time evolution of instantaneous lc and tc of a NACA 6612 and a NACA 0012 airfoil. As it 184
can be observed, for the NACA 0012 airfoil the lc and tc time evolution is symmetrical, whereas for the NACA 6612 185
airfoil the corresponding lc and tc time evolution is no longer symmetrical. Obviously, this is due to the fact that 186
symmetry is broken when we introduce the airfoil geometrical cambering. In this figure, it can be also clearly seen that for 187
the NACA 6612 airfoil, the majority of the thrust is produced during the downstroke or power stroke, whereas little or no 188
thrust is produced during the upstroke or recovery stroke. The little bumps appearing on the lift curves are due to the effect 189
of the LEV traveling on the airfoil surface. 190
From the previous results it becomes evident that the use of airfoil cambering in flapping flight is favorable in terms of 191
lift production and overall aerodynamic performance. In heaving airfoil studies, the understanding of the vortical pattern 192
created by the oscillating airfoil, related to the drag production in certain cases, but also to the thrust production in other 193
cases, is a crucial issue. In Fig. 5, a comparison of the vorticity field for a NACA 0012 and a Selig S1223 airfoil is 194
presented. Notice that the vorticity field for the S1223 airfoil (which is asymmetrical) in no longer symmetric, hence the 195
strength and shedding of the LEVs during the upstroke (recovery stroke) and downstroke (power stroke) are different. The 196
sequence illustrated in this figure is shown for four instants during the upstroke motion. 197
198
4 Conclusions and future perspectives 199
In the present paper, the effect of airfoil cambering on the aerodynamic performance of heaving airfoils was assessed. It 200
was found that this geometric parameter has a strong influence on the lift coefficient, while it has a smaller impact on the 201
thrust coefficient and propulsive efficiency. Thrust production depends more on the heaving parameters (St and k), rather 202
than on the airfoil shape. On the other hand, lift production is dominated by the airfoil shape, specifically, airfoil 203
cambering. Among all the asymmetric airfoils used, the NACA 6612 airfoil provides for high heaving amplitudes (low 204
heaving frequencies) the best aerodynamic performance in terms of the product .t lc c This airfoil generates high average 205
lift coefficient which, along with the thrust generation, are the crucial parameters if interest resides in flapping flight. The 206
S1223 airfoil, which resembles the cross-section of a Seagull or a Merganser wing, provides at low heaving amplitudes 207
(high heaving frequencies) the biggest average lift coefficient and very similar average thrust coefficient and propulsive 208
efficiency values when compared to other airfoils. On the other hand, at high heaving amplitudes (low heaving 209
frequencies), the aerodynamic performance of the S1223 airfoil was deteriorated in comparison to other airfoils, although 210
thrust and positive average lift coefficient were still produced. These observations lead us to think that this airfoil is 211
optimum for low heaving amplitudes, and hence for gliding flight and intermittent flapping flight, as expected since 212
Seagulls and Mergansers are very good gliders. 213
The qualitative and quantitative results obtained, agree with the hypothesis that: “flying and swimming animals cruise at 214
a Strouhal number tuned for high power efficiency” [15]. For the limited range of St and k values covered in this study, the 215
enhanced efficiency range is found to be between Strouhal number values corresponding to 0.2 < St < 0.4, in agreement 216
with the observations of Taylor et al. [15], Triantafyllou et al. [18] and Nudds et al. [19]. The results presented, also show 217
that non-symmetrical heaving airfoils exhibit a LEV shedding and frequency dependence similar to that of symmetric 218
heaving airfoils. 219
Finally, the results presented in this paper are limited to laminar flow; but in spite this fact, the results obtained provide 220
excellent insight into the aerodynamic performance of non-symmetrical heaving rigid airfoils. It is envisage in the future 221
the extension of the current study to turbulent flow and the dynamics of separation bubbles in the turbulent regime. Three-222
dimensional configurations, the use of more realistic (non-symmetrical) flapping kinematics and the use of flexible wings 223
are also foreseen. 224
225
5 Acknowledgements 226
Financial support of the Marie Curie actions EST project FLUBIO, through grant MEST-CT-2005-020228 is 227
acknowledged. The use of the computing facilities at the high performance computing center of the University of Stuttgart 228
(HLRS), was possible thanks to the support of the HPC-Europa++ project (project number 211437), with the support of the 229
European Community – Research Infrastructure Action of the FP7. 230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
References 246
[1] Shyy W, Lian Y, Tang J, Viieru D, Liu H. Aerodynamics of Low Reynolds Number Flyers, Cambridge Aerospace 247
Series, New York, 2008, Chaps. 1, 4. 248
[2] Anderson J, Streitlien K, Barret D, Triantafyllou M. Oscillating Foils of High Propulsive Efficiency. Journal of 249
Fluids Mechanics, 360, 1998, 41-72. 250
[3] Lua K, Lim T, Yeo K, Oo G. Wake-Structure Formation of a Heaving Two-Dimensional Elliptic Airfoil. AIAA 251
Journal, 45, No. 7, 2007, 1571-1583. 252
[4] Jones K, Dohring C, Platzer M. Experimental and Computational Investigation of the Knoller-Betz Effect. AIAA 253
Journal, 36, No. 7, 1998, 1240-1246. 254
[5] Lewin G, Haj-Hariri H. Modeling Thrust Generation of a Two-Dimensional Heaving Airfoil in a Viscous Flow. 255
Journal of Fluids Mechanics, 492, 2003, 339-362. 256
[6] Wang Z. Vortex Shedding and Frequency Selection in Flapping Flight. Journal of Fluids Mechanics, 410, 2000, 257
323-341. 258
[7] Young J, Lai J. Mechanisms Influencing the Efficiency of Oscillating Airfoil Propulsion. AIAA Journal, 45, No. 7, 259
2007, 1695-1702. 260
[8] Soueid H, Guglielmini L, Airiau C, Bottaro A. Optimization of the Motion of a Flapping Airfoil Using Sensitivity 261
Functions. Journal of Computers and Fluids, 38, 2009, 861-874. 262
[9] Henshaw W. A Fourth-Order Accurate Method for the Incompressible Navier-Stokes Equations on Overlapping 263
Grids. Journal of Computational Physics, 113, 1994, 13-25. 264
[10] Chesshire G, Henshaw W. Composite Overlapping Meshes for the Solution of Partial Differential Equations. 265
Journal of Computational Physics, 90, 1990, 1-64. 266
[11] Tritton D. Experiments on the Flow Past a Circular Cylinder at Low Reynolds Numbers. Journal of Fluids 267
Mechanics, 6, 1959, 547-567. 268
[12] Russell D, Wang Z. A Cartesian Grid Method for Modeling Multiple Moving Objects in 2D Incompressible 269
Viscous Flow. Journal of Computational Physics, 191, 2003, 177-205. 270
[13] Calhoun D, Wang Z. A Cartesian Grid Method for Solving the Two-Dimensional Streamfunction-Vorticity 271
Equations in Irregular Regions. Journal of Computational Physics, 176, 2002, 231-275. 272
[14] Choi J, Oberoi R, Edwards J, Rosati J. An Immersed Boundary Method for Complex Incompressible Flows. 273
Journal of Computational Physics, 224, 2007, 757-784. 274
[15] Taylor G, Nudds R, Thomas A. Flying and Swimming Animals Cruise at a Strouhal Number Tuned for High 275
Power Efficiency. Letters to Nature, 425, 2003, 707-711. 276
[16] Guerrero J. Numerical Simulation of the Unsteady Aerodynamics of Flapping Flight. Ph.D. Thesis, Department 277
of Civil, Environmental and Architectural Engineering, University of Genoa, Genoa, Italy, 2009. 278
[17] Liu T, Kuykendoll K, Rhew R, Jones S. Avian Wings. AIAA 24th Aerodynamic Measurement Technology and 279
Ground Testing Conference, Portland, Oregon, June 2004, AIAA Paper 2004-2186. 280
[18] Triantafyllou M, Triantafyllou G, Gopalkrishnan R. Wake Mechanics for Thrust Generation in Oscillating Foils. 281
Physics of Fluids, 3, 1991, 2835-2837. 282
[19] Nudds R, Taylor G, Thomas A. Tuning of Strouhal Number for High Propulsive Efficiency Accurately Predicts 283
How Wingbeat Frequency and Stroke Amplitude Relate and Scale with Size and Flight Speed in Birds. Proc. R. 284
Soc. Lond. B Biol. Sc., 7, 2004, 2071-2076. 285
286
Fig. 1 Simple overlapping grid system in physical space , for the sample case of the flow past a cylinder 287
288
289
Fig. 2 Comparison of thrust coefficient tc and propulsive efficiency variation with the 290
Strouhal number St (Re = 40000) 291
292
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6
Pro
pu
lsive
Effic
ien
cy
Th
rus
t Co
eff
icie
nt C
t
Strouhal number St
Anderson et al. [1], Ct
Young and Lai [7], Ct (Laminar)
Present results, Ct
Anderson et al. [1], Propulsive Ef f iciency
Young and Lai [7], Propulsive Ef f iciency (Laminar)
Present results, Propulsive Ef f iciency
293
Fig. 3 Overlapping grid system layout for the heaving airfoil case 294
295
296
297
Fig. 4 NACA 0012 and NACA 6612 lift coefficient and thrust coefficient (equal to negative drag) comparison. Top 298
figure: instantaneous lift coefficient time evolution. Bottom figure: instantaneous drag coefficient time evolution. 299
Heaving parameters: Re = 1100, St = 0.3, 0.3ah = 300
301
0.0
0.1
0.2
0.3
0.4
0.5
0.6
-8
-6
-4
-2
0
2
4
6
8
4.0 5.0 6.0 7.0 8.0 9.0 10.0
He
avin
g K
ine
ma
tics y
Lif
t Co
eff
icie
nt
Nondimensional time t
NACA 6612 Lift Coefficient (h=0.3)
NACA 0012 Lift Coefficient (h=0.3)
Heaving Kinematics
0.0
0.1
0.2
0.3
0.4
0.5
0.6
-1.5
-1.0
-0.5
0.0
0.5
1.0
4.0 5.0 6.0 7.0 8.0 9.0 10.0
He
avin
g K
ine
ma
tics y
Dra
g C
oe
ffic
ien
t
Nondimensional time t
NACA 6612 Drag Coefficient (h=0.3)
NACA 0012 Drag Coefficient (h=0.3)
Heaving Kinematics
302
Fig. 5 Comparison of the vorticity field for two different airfoils. Left column: NACA 0012 airfoil. Right column: 303
Selig S1223 airfoil. Heaving parameters: Re = 1100, St = 0.4, 0.3ah = . The sequence is shown for four instants 304
during the upstroke motion, where: A) t = 9.0, B) t = 9.25, C) t = 9.50, D) t = 9.75 305
306
307
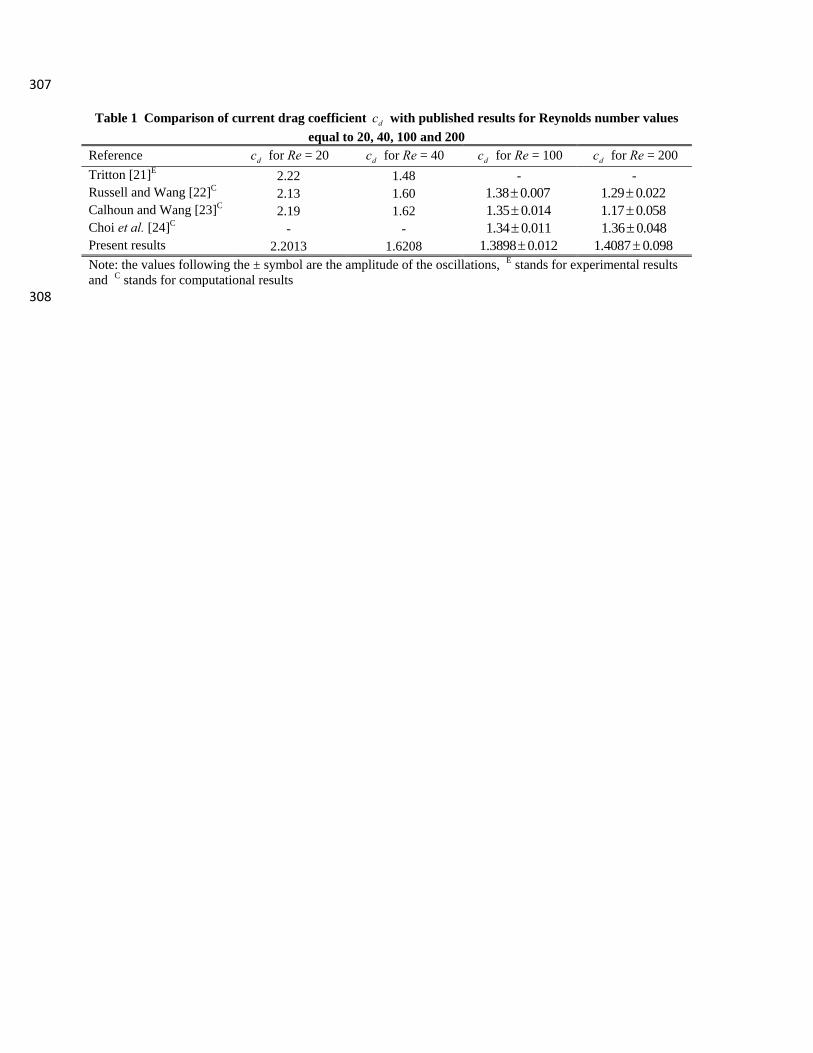
Table 1 Comparison of current drag coefficient dc with published results for Reynolds number values
equal to 20, 40, 100 and 200 Reference dc for Re = 20 dc for Re = 40 dc for Re = 100 dc for Re = 200
Tritton [21]E 2.22 1.48 - - Russell and Wang [22]C 2.13 1.60 1.38 0.007 1.29 0.022Calhoun and Wang [23]C 2.19 1.62 1.35 0.014 1.17 0.058Choi et al. [24]C - - 1.34 0.011 1.36 0.048Present results 2.2013 1.6208 1.3898 0.012 1.4087 0.098Note: the values following the ± symbol are the amplitude of the oscillations, E stands for experimental results and C stands for computational results
308
309
Table 2 Summary of results for St = 0.4, Re = 1100