Lecture 9: Flexibility Method Effects Of Temperature, Pre-strain & Support Displacement I th i ti h l id dl d ti th t t W In the previous sections we have only considered loads acting on the structure. W e would also like to consider the effects of • Temperature changes {D QT } QT • Prestrain of members {D QP } These effects are taken in to account by including them in the calculation of displacements (next page) in the released structure in a manner similar to {D QL } The effects will produce displacements in the released structure, and the displacements are associated with the redundant actions {Q}in the released structure. The temperature displacements {D QT } in the released structure may be due to either uniform changes in temperature or to differential changes in temperature. A differential change in temperature assumes that the top and the bottom of the member h dh ill d l h i fh l changes temperature and thus will undergo a curvature along the axis of the structural component. A uniform change in temperature will increase or decrease the length of the structural component.
Transcript
Lecture 9: Flexibility Method
Effects Of Temperature, Pre-strain & Support Displacement
I th i ti h l id d l d ti th t t WIn the previous sections we have only considered loads acting on the structure. We would also like to consider the effects of
• Temperature changes {DQT}p g { QT}
• Prestrain of members {DQP}
These effects are taken in to account by including them in the calculation of displacements (next page) in the released structure in a manner similar to {DQL} The effects will produce displacements in the released structure, and the displacements are associated with the redundant actions {Q}in the released structure.
The temperature displacements {DQT } in the released structure may be due to either uniform changes in temperature or to differential changes in temperature. A differential change in temperature assumes that the top and the bottom of the member h d h ill d l h i f h lchanges temperature and thus will undergo a curvature along the axis of the structural
component. A uniform change in temperature will increase or decrease the length of the structural component.
Lecture 9: Flexibility Method
When the matrices {DQT } and {DQP}are found they can be added to the matrix {DQL } of displacements due to loads in order to obtain the sum of all displacements in the released structure. By superposition
As before the superposition equation is solved for the matrix of redundants {Q}.
{ } { } { } { } [ ]{ }QFDDDD QPQTQLQ +++=
As before the superposition equation is solved for the matrix of redundants {Q}.
Consider the possibility of known displacements occurring at the restraints (or supports) of the structure. There are two possibilities to consider, depending on
h h h i di l d f h d d i {Q}whether the restraint displacements corresponds to one of the redundant actions {Q}.
If the displacement does correspond to a redundant, its effect can be taken into account by including the displacement in the vector {DQ }.y g p { Q }
In a more general situation there will be restraint displacements that do not correspond to any of the selected redundants. In that event, the effects of restraint displacements must be incorporated in the analysis of the released structure in a manner similar tomust be incorporated in the analysis of the released structure in a manner similar to temperature displacements and prestrains. When restraint displacements occur in the released structure a new matrix {DQR } is introduced.
Lecture 9: Flexibility Method
Thus the sum of all matrices representing displacements in the released structure will be denoted by {DQS} and is expressed as follows
{ } { } { } { } { }QRQPQTQLQS DDDDD +++=
{ } { } [ ]{ }QFDD QSQ +=
The generalized form of the superposition equation becomes
{ } { } [ ]{ }QQSQ
When this expression is inverted to obtain the redundants we find that
{ } [ ] { } { }{ }QSQ DDFQ −= −1
Lecture 9: Flexibility Method
Joint Displacements, Member End Actions And Reactionsp
In the previous sections we have focused on finding redundants using the flexibility method. After redundants were found other actions in the released structure could be found using equations of equilibrium When all actions in a structure have beenfound using equations of equilibrium. When all actions in a structure have been determined it is possible to compute displacements by isolating the individual components of a structure and computing displacements from strength of materials expression. Usually in a structural analysis the displacements of the joints are of primary interest.
Instead of following the procedure just outlined we will now introduce a systematic procedure for calculating joint displacements, member end actions and reactions directly into the flexibility method computationsinto the flexibility method computations.
Lecture 9: Flexibility Method
Consider the two span beam to the left where we will compute the redundants Q1 and Q2 as well as the joint 1 2displacements DJ1 and DJ2, as well as reactions AR1 and AR2.
Joint displacement denoted by {D }Joint displacement denoted by {DJ } can be either a translation of rotation
Member end-actions {AM} are the couples and forces that act at the ends of a member when that component is isolated from the remainder if the structure The sign convention forstructure. The sign convention for member end actions will be:
+ when up for translations and forcesh l k i f i+ when counterclockwise for rotation
and couplesReactions other than redundants will be denoted {AR}.
Lecture 9: Flexibility Method
The principle of superposition will be used to obtain the joint displacements [DJ] in the actual structure. In order to do this we need to evaluate the displacements in the released structure.
QDQDDD ++=
In the released structure the displacements associated with the actual joint displacements are designated {DJL}. The rotations at joints B ( = DJ1) and C ( = DJ2) are required. Consider the expressions
Here
DJ1 = is the displacement desired, in this case the rotation at joint B
21211111 QDQDDD JQJQJLJ ++=
J1 p jDJL1 = is the displacement at joint B caused by the external loads in the released
structure.DJQ11 = is the displacement at joint B caused by a unit load at joint B
corresponding to the redundant Qcorresponding to the redundant Q1DJQ12 = is the displacement at joint B caused by a unit action at joint C
corresponding to the redundant Q2
A i il i b d i d f th t ti t C ( D ) iA similar expression can be derived for the rotation at C ( = DJ2), i.e.,
22212122 QDQDDD JQJQJLJ ++=
Lecture 9: Flexibility Method
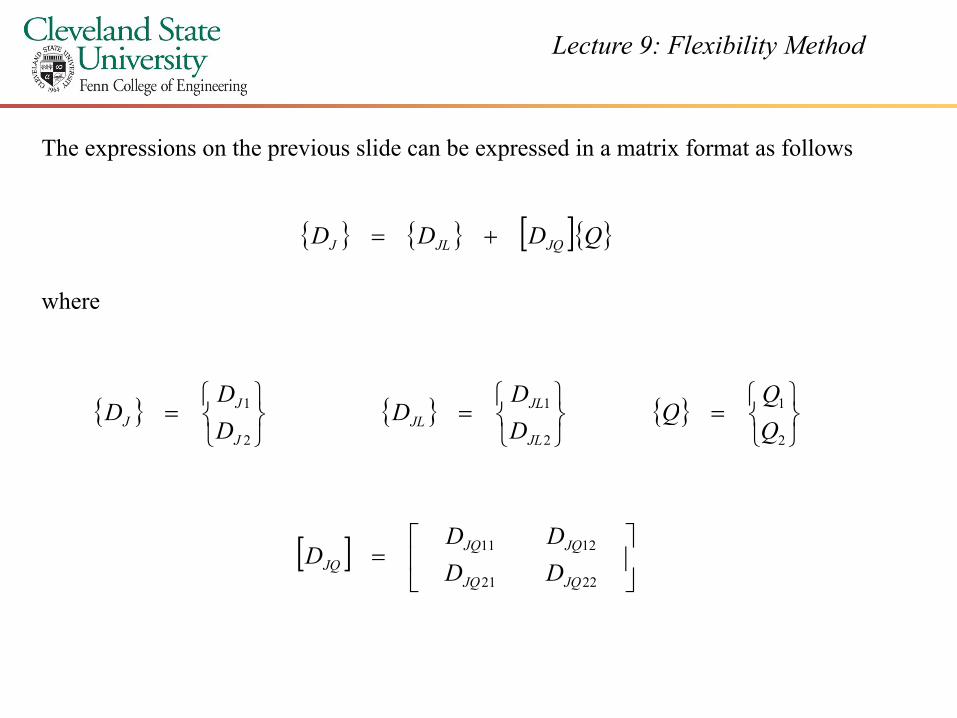
The expressions on the previous slide can be expressed in a matrix format as follows
{ } { } [ ]{ }QDDD JQJLJ +=
where
{ }
1JD
D { }
1JLD
D { }
1Q
Q
where
{ }
=
2JJ D
D { }
=
2JLJL D
D { }
=
2QQ
[ ]
=
2221
1211
JQJQ
JQJQJQ DD
DDD
Lecture 9: Flexibility Method
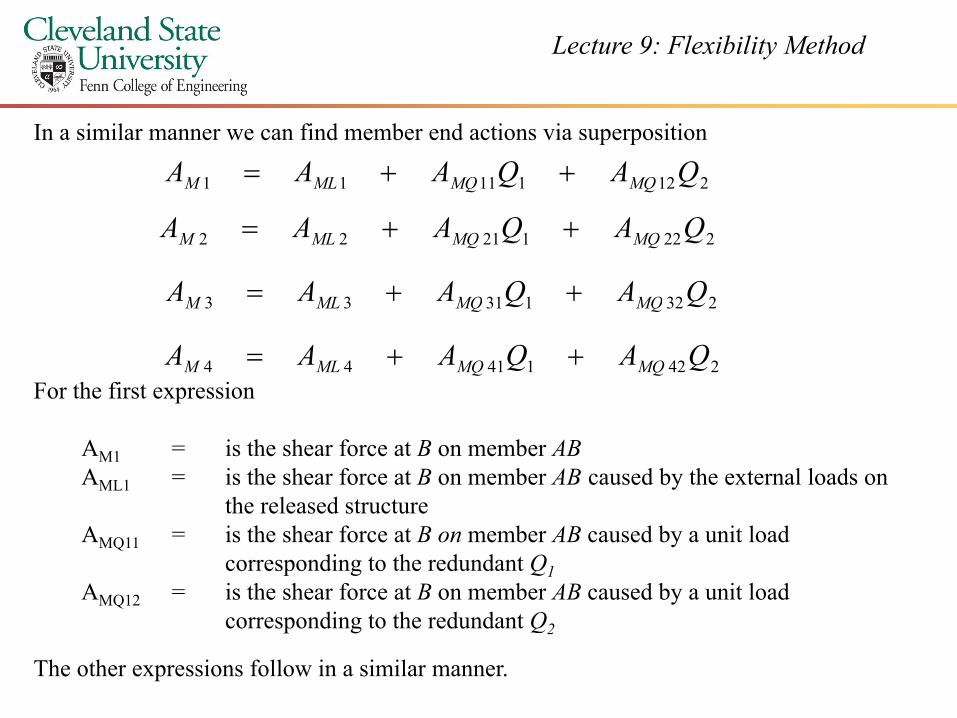
In a similar manner we can find member end actions via superposition
21211111 QAQAAA MQMQMLM ++=
22212122 QAQAAA MQMQMLM ++=
23213133 QAQAAA MQMQMLM ++=
For the first expression
23213133 MQMQMLM
24214144 QAQAAA MQMQMLM ++=
AM1 = is the shear force at B on member ABAML1 = is the shear force at B on member AB caused by the external loads on
the released structurethe released structureAMQ11 = is the shear force at B on member AB caused by a unit load
corresponding to the redundant Q1AMQ12 = is the shear force at B on member AB caused by a unit load
di t th d d t Qcorresponding to the redundant Q2
The other expressions follow in a similar manner.
Lecture 9: Flexibility Method
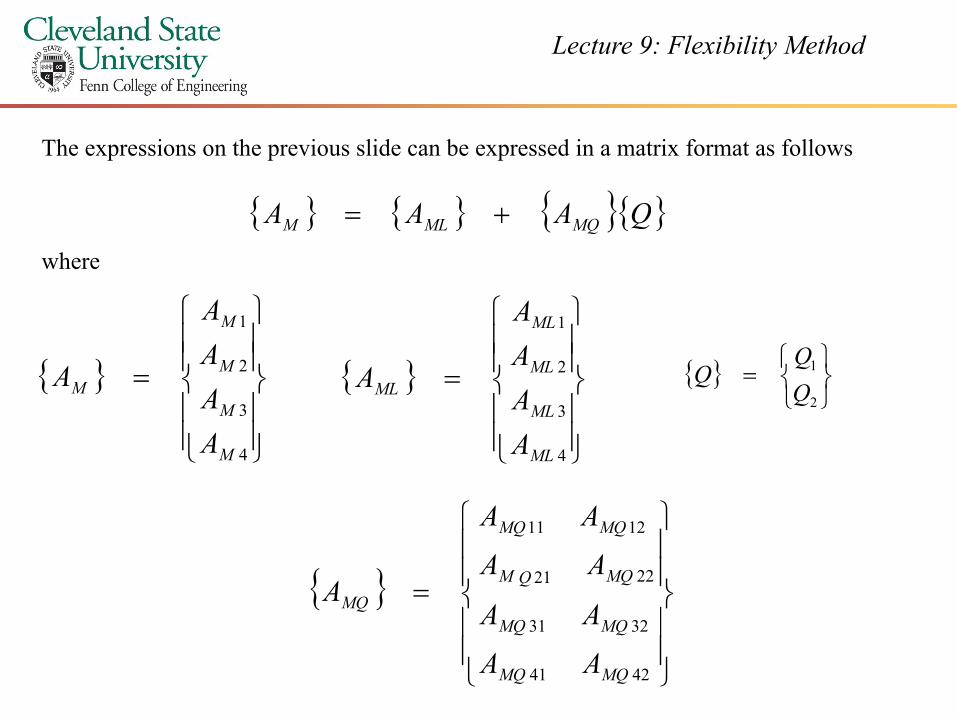
{ } { } { }{ }QAAA
The expressions on the previous slide can be expressed in a matrix format as follows
A A
{ } { } { }{ }QAAA MQMLM +=
where
{ }
=2
1
QQ
Q{ }
=3
2
1
M
M
M
M AAA
A { }
=3
2
1
ML
ML
ML
ML AAA
A
4
3
M
M
A
4
3
ML
ML
A
AA
{ }
=2221
1211
MQQM
MQMQ
MQ AA
AA
AA
A
4241
3231
MQMQ
MQMQ
AA
AA
Lecture 9: Flexibility Method
In a similar manner we can find reactions via superposition
21211111 QAQAAA RQRQRLR ++=
22212122 QAQAAA RQRQRLR ++=
For the first expression
A i th ti i th t l b t AAR1 = is the reaction in the actual beam at AARL1 = is the reaction in the released structure due to the external loadsARQ11 = is the reaction at A in the released structure due to the unit action
corresponding to the redundant Q1p g Q1ARQ12 = is the reaction at A in the released structure due to the unit action
corresponding to the redundant Q2
The other expression follows in a similar manner.p
Lecture 9: Flexibility Method
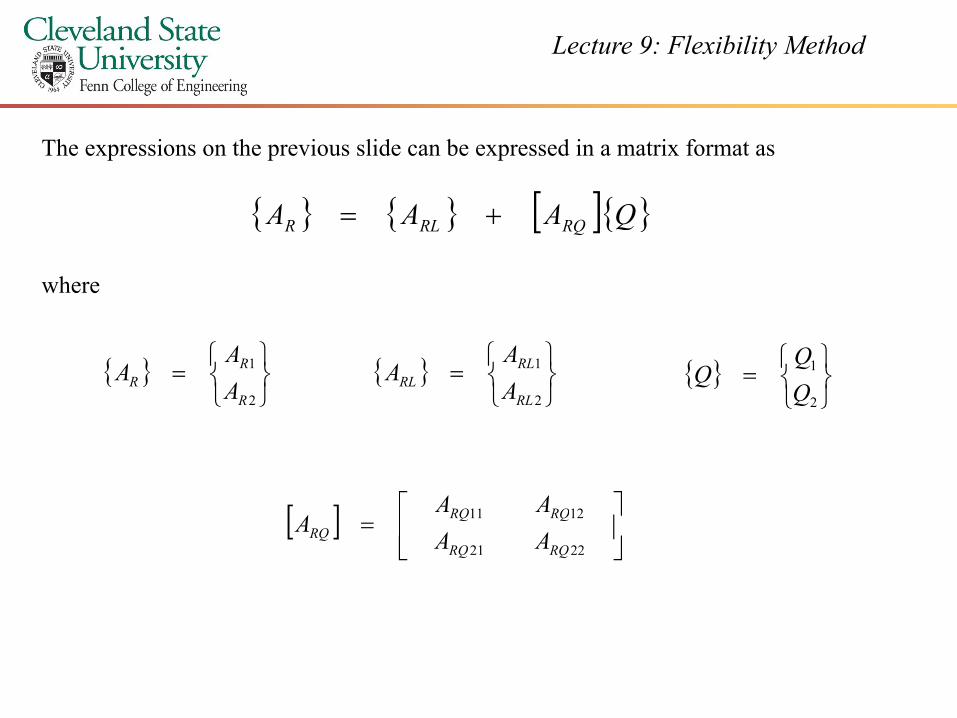
The expressions on the previous slide can be expressed in a matrix format as
{ } { } [ ]{ }QAAA{ } { } [ ]{ }QAAA RQRLR +=
where
{ }
=2
1
R
RR A
AA { }
=2
1
RL
RLRL A
AA { }
=2
1
QQ
Q
[ ] 1211 RQRQ AA[ ]
=
2221
1211
RQRQ
RQRQRQ AA
A
Lecture 9: Flexibility Method
When the effects of joint displacements, member end actions and reactions are accounted for the equation of superposition becomes
{ } { } [ ]{ }QDDD JQJSJ +=
here
{ } { } { } { } { }JRJPJTJLJS DDDDD +++=
{ } { } [ ]{ }QDDD JQJSJ +
where
{DJT } = joint displacement due to temperature
{DJP } = joint displacement due to prestrain
{DJR } = joint displacement corresponding to redundants
Hence there is no need to generalize the expression for {AM } and {AR } to account for temperature effects, prestrain and displacement effects. None of these effects will produce any actions or reactions in a statically determinate released structure Instead the releasedany actions or reactions in a statically determinate released structure. Instead the released structure will merely change its configurations to accommodate these effects. The effects of these influences are merely propagated into matrices {AM } and {AR } through the value of the redundants {Q}.
Lecture 9: Flexibility Method
Example
C id th t b t th l ftConsider the two span beam to the left where it is assumed that the objective is to calculate the various joint displacements DJ , member end actions p J AM , and end reactions AR. The beam has a constant flexural rigidity EI and is acted upon by the following loads
PPPLMPP
==1 2
PPPP
==
3
2
Lecture 9: Flexibility Method
Consider the released t t d th tt distructure and the attending
moment area diagrams.
The (M/EI) diagram was drawn by parts Eachdrawn by parts. Each action and its attending diagram is presented one at a time in the figure starting with actions on the far right.
Lecture 9: Flexibility Method
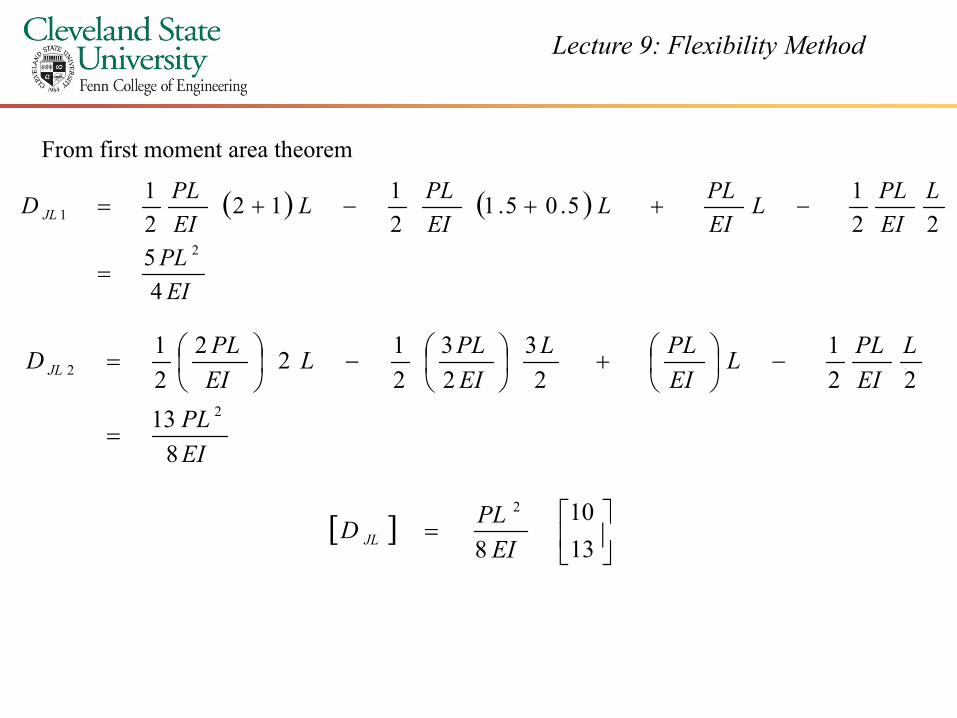
From first moment area theorem
( ) ( ) LPLLPLLPLLPLD 150511121+++= ( ) ( )
EIPL
EIL
EIL
EIL
EID JL
45
225.05.1
212
22
1
=
−++−+=
LEIPLL
EIPLL
EIPLL
EIPLD JL 22
12
323
2122
21
2
2 −
+
−
=
EIPL
813 2
=
102PL[ ]
=
1310
8 EIPLD JL
Lecture 9: Flexibility Method
Using the following free body diagram of the released structure
Th f h i f ilib i
30
LLM A =∑
Then from the equations of equilibrium
2
22
32
2
2
2
PLA
LPLPPLLPA
RL
RL
−=
+−+−=
PPPAFY
20=∑
2
PAPPPA
RL
RL
22
1
1
=+−−=
Lecture 9: Flexibility Method
Using a free body diagram from segment AB of the entire beam, i.e.,
then once again from the equations of equilibrium
022
0
1
1
=+−=
=∑
ML
ML
Y
APPA
F
1ML
22
0
PLPLLPA
M B
+
=∑
23
222
2
2
2
PLA
PLPA
ML
ML
=
−−+=
Lecture 9: Flexibility Method
Using a free body diagram from segment BC of the entire beam, i.e.,
then once again from the equations of equilibrium
0
0
3
=+−=
=∑ML
Y
APPA
F
03 =MLA
0PL
M B =∑
2
2
4
4
PLA
PLPLA
ML
ML
−=
+−=
Lecture 9: Flexibility Method
Thus the vectors AML and ARL are as follows:
3
0
PL
2P
=0
2A ML
−
=
2PL
ARL
−
2PL
Lecture 9: Flexibility Method
Consider the released beam with a unit load at point B
L
LEILD JQ 2
1
2
11 =
L
LEILD JQ 2
1
2
21 =
EIL
2= EI2
=
Lecture 9: Flexibility Method
Consider the released beam with a unit load at point C
( ) LEILD JQ 12
21
12 += LEI
LD JQ 22 2221
=
EIL
23 2
=EIL22
=
Lecture 9: Flexibility Method
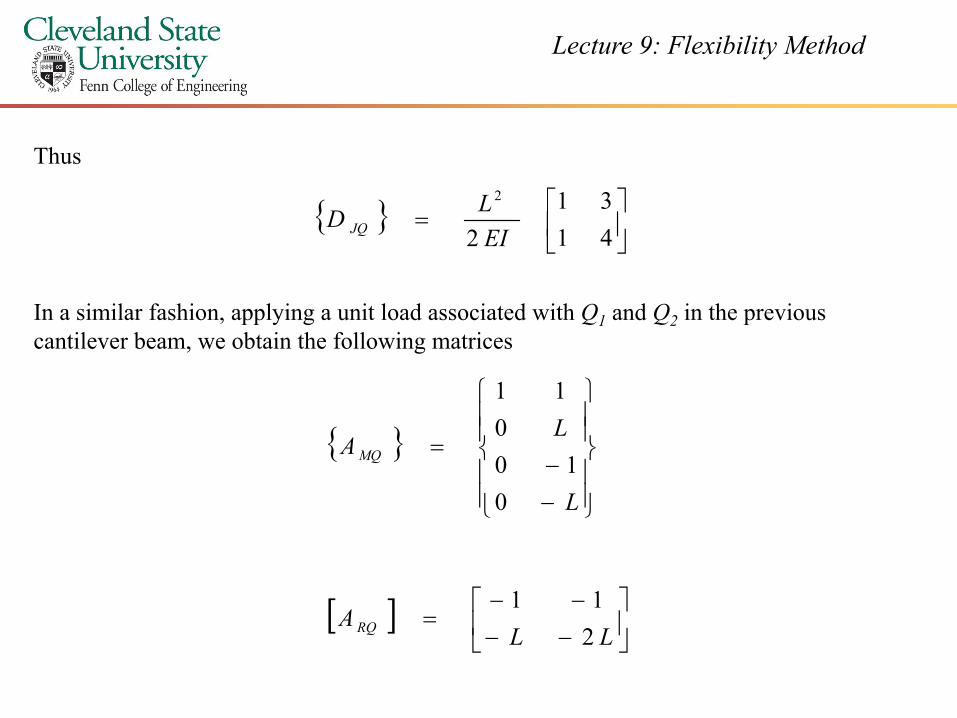
{ } 312L
Thus
{ }
=
4131
2 EILD JQ
I i il f hi l i it l d i t d ith Q d Q i th i
11
In a similar fashion, applying a unit load associated with Q1 and Q2 in the previous cantilever beam, we obtain the following matrices
{ }
−−
=
L
LA MQ
010
0
[ ]
−−
A11[ ]
−−
=LL
A RQ 2
Lecture 9: Flexibility Method
{ }
60PQ
Previously (Lecture 5)
{ }
−
=6456
Q
with
{ } { } [ ]{ }QDDD JQJLJ +=
{ }
=172PLD J
then
{ }
− 5112 EIJ
Lecture 9: Flexibility Method
Similarly, with
{ } { } [ ]{ }QAAA MQMLM +=
5
and knowing [AML], [AMQ] and [Q] leads to
{ }
=
L
LPA M
3664
205
56 L36
Lecture 9: Flexibility Method
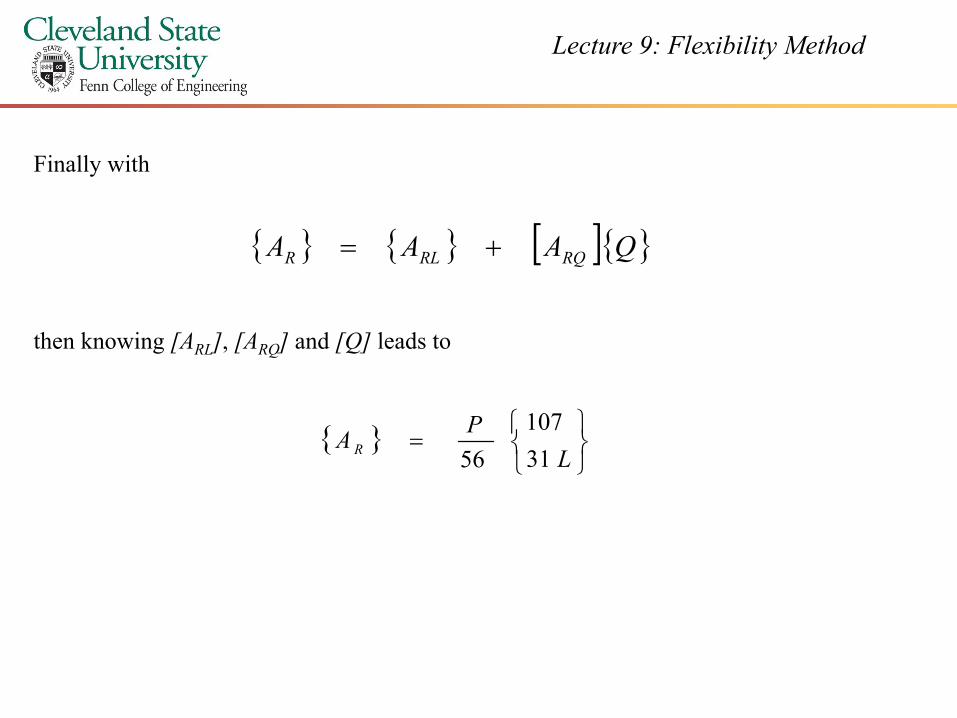
Finally with
{ } { } [ ]{ }QAAA RQRLR +=
then knowing [ARL], [ARQ] and [Q] leads to
{ }
=L
PA R 31107
56
Lecture 9: Flexibility Method
Summary Of Flexibility Method
The analysis of a structure by the flexibility method may be described by the following steps:
1. Problem statement2. Selection of released structure3 Analysis of released structure under loads3. Analysis of released structure under loads4. Analysis of released structure for other causes5. Analysis of released structure for unit values of redundant6. Determination of redundants through the superposition equations, i.e.,
{ } { } [ ]{ }QFDD QSQ +=
{ } { } { } { } { }QRQPQTQLQS DDDDD +++=
{ } { }{ }[ ] [ ] { } { }{ }QSQ DDFQ −= −1
Lecture 9: Flexibility Method
7. Determine the other displacements and actions. The following are the four flexibility matrix equations for calculating redundants member end actions, reactions and joint displacementsdisplacements
{ } { } [ ]{ }QDDD JQJSJ +=
{ } { } [ ]{ }QAAA +{ } { } [ ]{ }QAAA MQMLM +=
{ } { } [ ]{ }QAAA RQRLR +=
where for the released structure
{ } { } { } { } { }JRJPJTJLJS DDDDD +++=
All matrices used in the flexibility method are summarized in the following tables
Lecture 9: Flexibility Method
MATRIX ORDER DEFINITION
Q 1 U k d d t ti ( N b f d d t)Q q x 1 Unknown redundant actions (q = Number of redundant)
q x 1Displacements in the actual structure Corresponding to the redundantQD
q x 1Displacements in the released structure corresponding to the redundants and due to loadsQLD
q x qDisplacements in the released structure corresponding to the redundants and due unit values of the redundants (Flexibility coefficients)
i l i h l d di h
QQDorF
q x 1Displacements in the released structure corresponding to the redundants and due to temperature, prestrain, and restraint displacements (other than those in DQ)
QRQPQT DDD ,,
q x 1QSDQRQPQTQLQS DDDDD +++=
Lecture 9: Flexibility Method
MATRIX ORDER DEFINITION
j 1 J i t di l t i th t l t t (j b fj x 1 Joint displacement in the actual structure (j = number of joint displacement)
j x 1 Joint displacements in the released structure due to loadsJLD
JD
j x 1 Joint displacements in the released structure due to unit values of the redundants
QLD
j x 1Joint displacements in the released structure due to temperature, prestrain, and restraint displacements (other than those in DQ)
JRJPJT DDD ,,
j x 1 JRJPJTJLJS DDDDD +++=JSD
Lecture 9: Flexibility Method
MATRIX ORDER DEFINITION
m x 1 Member end actions in the actual structure A (m = Number of end‐actions)
m x 1 Member end actions in the released structure due to loadsMLA
MA
m x q Member end actions in the released structure due to unit values of the redundants
r x 1 Reactions in the actual structure (r = number of reactions)RA
MQA
r x 1 Reactions in the released structure due to loads
RA
RLA
r x qReactions in the released structure due to unit values of the































![Superposition rules, Lie theorem, and partial differential ... · Superposition rules, Lie theorem, and partial differential equations ... [15] he was able to ... superposition](https://static.documents.pub/doc/80x56/5b51ae327f8b9a7b648c4dfc/superposition-rules-lie-theorem-and-partial-dierential-superposition.jpg)








