Anna Naumovich Oleg Iliev Francisco Gaspar Efficient numerical solution of the Biot poroelasticity system in multilayered domains Freudenstadt-Lauterbad, March 20-22, 2006 Workshop on Model Concepts for Fluid-Fluid and Fluid-Solid Interactions Fraunhofer Institute for Industrial Mathematics Kaiserslautern, Germany University of Zaragoza, Spain
Transcript
Anna NaumovichOleg Iliev Francisco Gaspar
Efficient numerical solution of theBiot poroelasticity system in multilayered domains
Freudenstadt-Lauterbad, March 20-22, 2006
Workshop on Model Concepts for Fluid-Fluid and Fluid-Solid Interactions
Fraunhofer Institute for Industrial MathematicsKaiserslautern, Germany
University of Zaragoza, Spain
Outline
Theory of poroelasticity and its practical applications
Biot model of poroelasticity
Layered domains, interface problem
Finite volume discretization
Multigrid method
Multigrid for problem with discontinuous coefficients.Operator-dependent prolongation
Numerical results
Summary
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
Poroelasticitydeformation of the
elastic porous material
+= diffusionelasticityfluid flow
inside the pores
In general case coupled problem for flow and stress fields
change in fluid flow
change in stress of the solid
Practical applications:
- geomechanics (land subsidence, borehole problems, construction of embankments, etc.)
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
Γ
[ ] 0
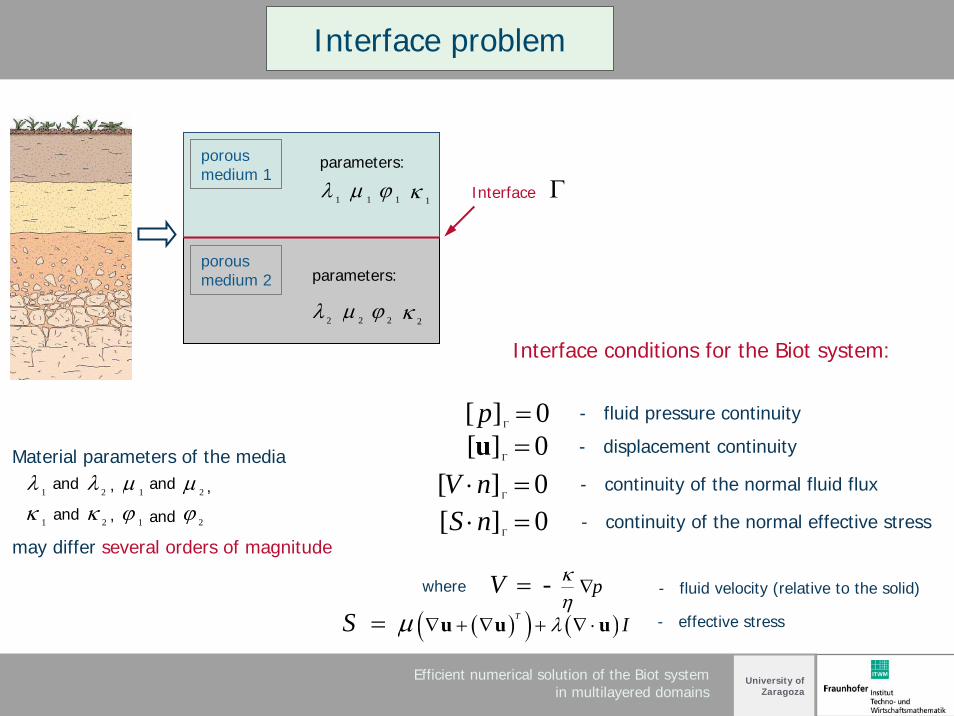
Interface conditions for the Biot system:
p Γ = [ ] 0 Γ =u [ ] 0 V n Γ
- fluid pressure continuity
- displacement continuity
⋅ = [ ] 0 S n Γ⋅ =
- continuity of the normal fluid flux
- continuity of the normal effective stress
- pV κη∇=
( )( ) ( ) T IS λμ ∇ + ∇ + ∇ ⋅= u u u
- fluid velocity (relative to the solid)
- effective stress
Interface problem
parameters:
parameters:
1λ 1μ 1ϕ1κ
2λ 2μ 2ϕ2κ
Interface
porousmedium 1
porousmedium 2
1
where
λ 2λMaterial parameters of the media
and
, 1
may differ several orders of magnitude
μ 2μand
,
1κ 2κ , 1ϕ 2ϕand and
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
and
Interface :
z ξ=
1κ
2κ
1λ 1μ
2λ 2μ ( ) 02
=⎥⎦
⎤⎢⎣
⎡∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
=ξ
μλλz
zw
yv
xu
0
=⎥⎦⎤
⎢⎣⎡
∂∂
=ξzzpk
0=⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
=ξ
μz
yw
zv
[ ] 0 ==ξzp
[ ] 0 ==ξzu
0=⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
=ξ
μzx
wzu
[ ] 0 ==ξzv [ ] 0 ==ξzwξ=z
elas
ticity
part
diff
usio
npa
rt2n
1n
3D model with horizontal plane interface
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
We use staggered grid to discretize the system *
u – component of the displacement
w – component of the displacementv – component of the displacement
Finite volume discretization. Staggered grid
- the domain is divided into 4 sets of control volumes
The finite volume discretization is derived:
- using the polinomials, which are piecewise – linear, extended with one special bilinear term in respectivedirection (for displacement components)
- using piecewise - trilinear polinomials (for fluid pressure)
- discretization near the interface resulted in some specificaveraging expressions for coefficients;
- numerical experiments showed that this discretizationprovides second order of convergence for basic variables as well as for fluxes of the problem in maximum norm.
pressure (in the vertices)
All these polinomials must satisfy interface continuityconditions
* following the work of P. Vabischevich, F. Lisbona, F. Gaspar „A FD analysis of Biot‘s consolidation model“
staggered grid in 3D
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
! The components of a MG method have to be adjusted to particular class of problems
MG COMPONENTS:
Type of the MG cycle
Smoother
Coarsening
Coarse grid operator
Restriction
Prolongation
MG is a general strategy, which exploits the fact that a problem can be solved on differentscales of resolution (grids, levels)MG is an optimal order method. Offers a possibility to solve problems with N unknowns with O(N) work and storage for a large class of problemsMG convergence speed does not depend on a discretization mesh size h
Multigrid method and its components
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
Convergence of a multigrid solver is strongly influenced by the jumps of the coefficients
For strongly jumping coefficients convergence may depend on the size of the jump and its location with respect to the grid lines. Even divergence may occur.
Smoother
Restriction
Coarse grid operator
Prolongation operator
IMPORTANT
- tri- (bi-) linear interpolation
- bicubic interpolation, etc.
- operator-dependent interpolation
- Accounts for the jumps of coefficients
- Rely on the interface continuityconditions (not continuity of the gradients)
Rely on the continuity of the errors and their gradients
PROLONGATION OPERATORS:
Multigrid for problems with strongly discontinuous coefficients
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
Operator-dependent prolongation
= p
p pp p
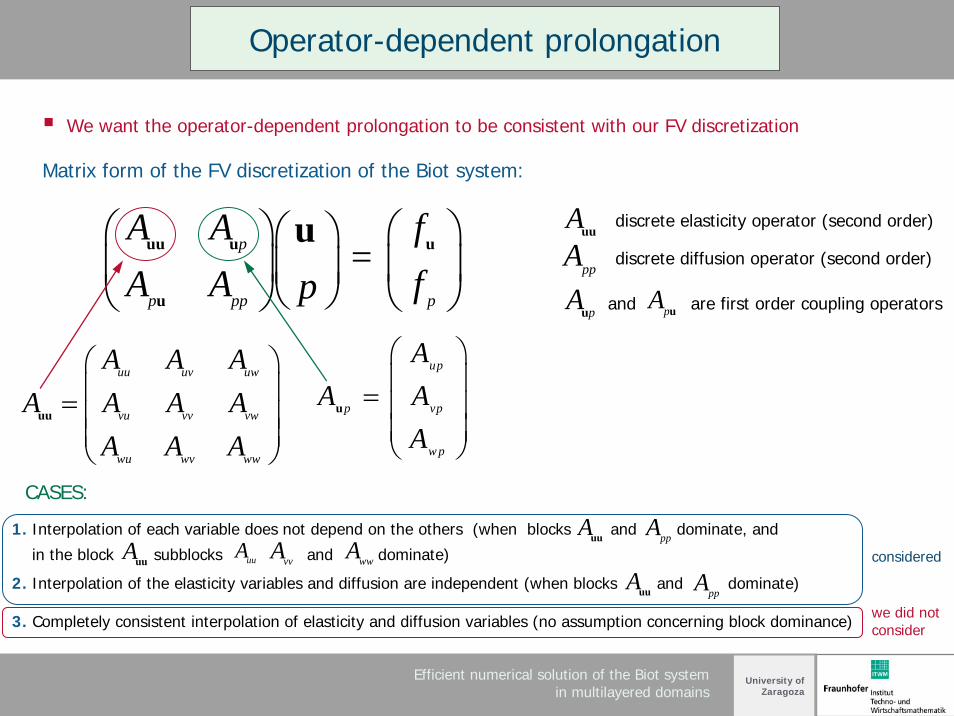
We want the operator-dependent prolongation to be consistent with our FV discretization
Matrix form of the FV discretization of the Biot system:
A A fA A fp
⎛ ⎞ ⎛ ⎞⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠ ⎝ ⎠
uu u u
u
u
uu uv uw
vu vv vw
wu wv ww
A A AA A A A
A A A
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
uu
pA u
discrete elasticity operator (second order)Auu
ppApAu and are first order coupling operators
1. Interpolation of each variable does not depend on the others (when blocks and dominate, and
in the block subblocks and dominate)
2. Interpolation of the elasticity variables and diffusion are independent (when blocks and dominate)
3. Completely consistent interpolation of elasticity and diffusion variables (no assumption concerning block dominance)
up
p vp
wp
discrete diffusion operator (second order)
AA A
A
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
u
Auu
Auu uuAwwA
ppAvvA
Auu ppA
we did notconsider
considered
CASES:
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
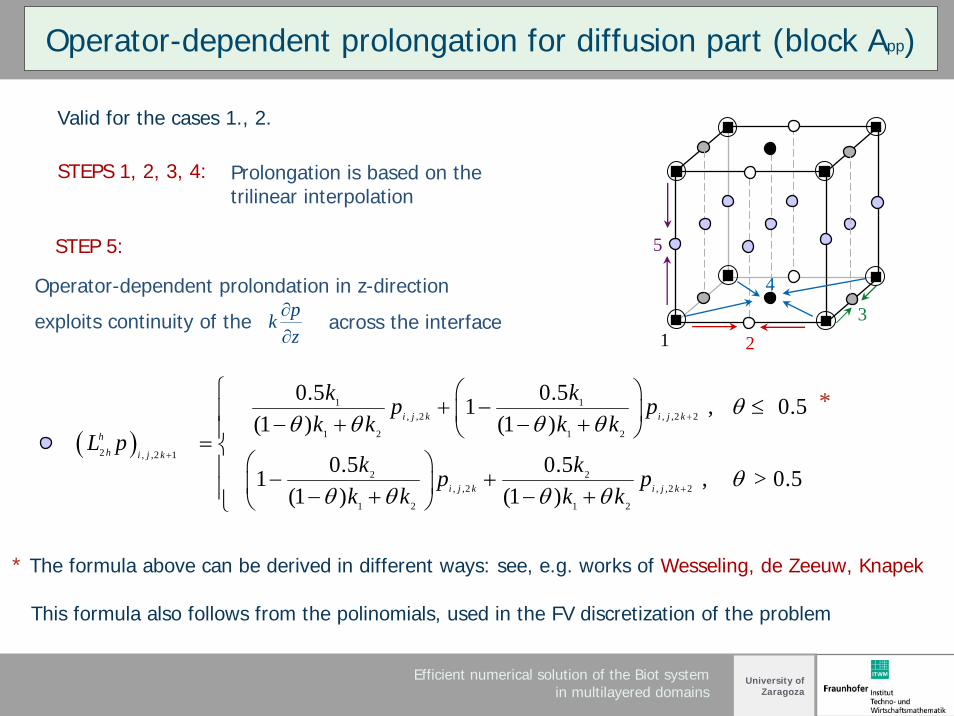
exploits continuity of the across the interfacepkz∂∂
Operator-dependent prolondation in z-direction
( )
1 1, ,2 , ,2 2
1 2 1 2
2 , ,2 1
2 2, ,2 , ,2 2
1 2 1 2
0.5 0.5 1 , 0.5(1 ) (1 )
0.5 0.5 1 , > 0.5
(1 ) (1 )
i j k i j k
hh i j k
i j k i j k
k kp pk k k k
L pk kp p
k k k k
θθ θ θ θ
θθ θ θ θ
+
+
+
⎧ ⎛ ⎞+ − ≤⎪ ⎜ ⎟− + − +⎪ ⎝ ⎠= ⎨
⎛ ⎞⎪ − +⎜ ⎟⎪ − + − +⎝ ⎠⎩
23
4
5
1
* The formula above can be derived in different ways: see, e.g. works of Wesseling, de Zeeuw, Knapek
This formula also follows from the polinomials, used in the FV discretization of the problem
STEP 5:
STEPS 1, 2, 3, 4: Prolongation is based on the trilinear interpolation
Operator-dependent prolongation for diffusion part (block App)
Valid for the cases 1., 2.
*
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
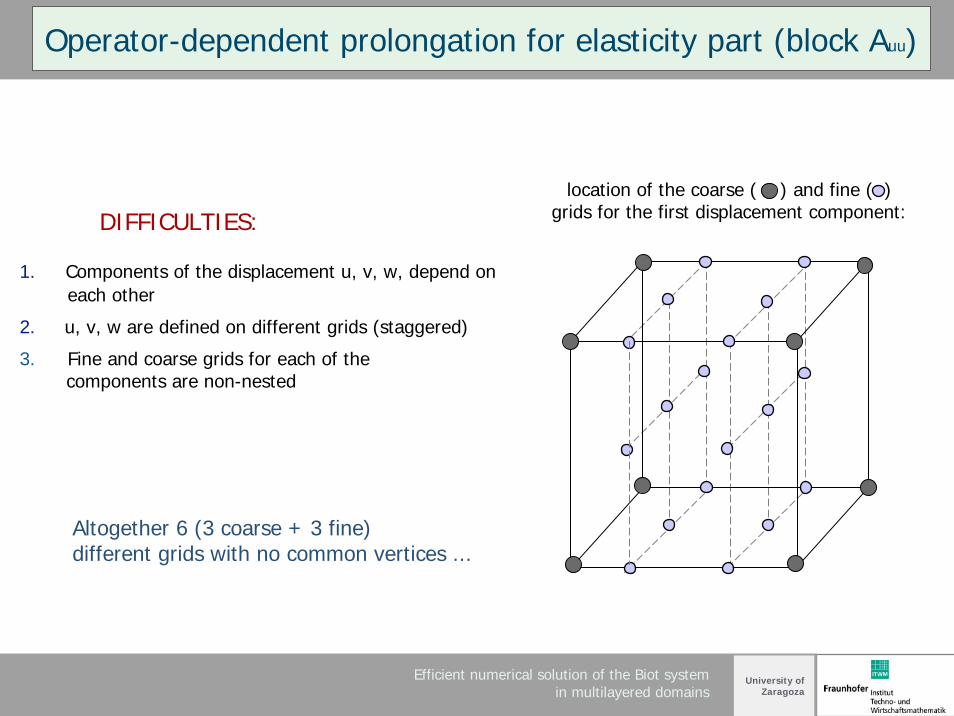
DIFFICULTIES:
1. Components of the displacement u, v, w, depend on each other
2. u, v, w are defined on different grids (staggered)
3. Fine and coarse grids for each of thecomponents are non-nested
location of the coarse ( ) and fine ( ) grids for the first displacement component:
Altogether 6 (3 coarse + 3 fine) different grids with no common vertices ...
Operator-dependent prolongation for elasticity part (block Auu)
Efficient numerical solution of the Biot systemin multilayered domains
University of Zaragoza
Standard linear interpolation in x - and y - directionsOperator-dependent interpolation in z - direction
2 2 2 20.5 0.5 0.5
2 2( , , 0.25 ) 1 0.25 ( , ) 0.25 ( , )2 2k z k kw x y z h w x y w x yλ μ λ μ
λ μ λ μ− − +
⎛ ⎞+ ++ = − +⎜ ⎟⎜ ⎟+ +⎝ ⎠
1 1 1 10.5 0.5 0.5
2 2( , , 0.75 ) 0.25 ( , ) 1 0.25 ( , )2 2k z k kw x y z h w x y w x yλ μ λ μ