EIC Climate Change Technology Conference 2013 1 Driver-Oriented Optimization of Power Management in Plug-In Hybrid Electric Vehicles CCTC 2013 Paper Number 1569730735 Hongtao Zhang 1,2 , Yanzhou Qin 1 , Xianguo Li 1,* and Xinzhi Liu 2 1 Department of Mechanical and Mechatronics Engineering, University of Waterloo, 200 University Avenue West, Waterloo, Ontario N2L 3G1, Canada 2 Department of Applied Mathematics, University of Waterloo, 200 University Avenue West, Waterloo, Ontario N2L 3G1, Canada * Corresponding author: [email protected]Abstract This paper studies the optimization problem of power management in plug-in hybrid electric vehicles (PHEVs) subject to uncertain and dynamical driving cycles. Most existing power management strategies are designed for a fixed or specific driving cycle in the scenario that the trip information is assumed known a priori, which usually encounter implementation difficulties in practice once the driving cycle becomes unknown and time-varying. To solve this problem, we present a stochastic driving cycle model and utilize finite-horizon stochastic dynamic programming (SDP) to globally optimize vehicle performance in stochastic sense. Simulation results show that the proposed strategy makes a significant progress in improving fuel economy. Keywords: plug-in hybrid electric vehicles, power split, power management, optimal control, stochastic dynamic programming 1. Introduction With increasing fuel prices, aggravating air pollution and a looming global energy crisis in the next decade, energy and environmental sustainability has become a major concern in the contemporary automotive industry. One of promising solutions is to alternatively use electricity powertrain directly charged from the electric grid where energy is mainly generated from renewable sources such as wind energy, solar energy, nuclear energy, etc., to completely or partially replace the propulsion power of internal combustion engine (ICE). Hybrid electric vehicles (HEVs) with dual-power-source were presented under these circumstances. As an upgraded version of HEVs, PHEVs consisting of an ICE, multiple electric motors/generators and an energy storage system (ESS) use both fuel and electricity for propulsion and can obtain electricity through onboard generation or by plugging into the electric grid. Different from electric vehicles (EVs), PHEVs not only possess the all-electric capability in urban areas like EVs but also have the ability for extended range capability because of a small onboard ICE. Compared with conventional HEVs, PHEVs have the potential to operate in all-electric range (AER) mode over a more significant distance, which is directly responsible for fuel economy. Currently, interest in PHEVs is fast growing among consumers, automotive companies, electric utilities and policy makers [1–10]. Although the hybridization of powertrain of PHEVs brings a lot of benefits to reduction of fuel consumption and pollution emissions, it also makes the power management of PHEVs more
Transcript
EIC Climate Change Technology Conference 2013
1
Driver-Oriented Optimization of Power Management in Plug-In Hybrid Electric Vehicles
CCTC 2013 Paper Number 1569730735
Hongtao Zhang1,2
, Yanzhou Qin1, Xianguo Li
1,* and Xinzhi Liu
2
1 Department of Mechanical and Mechatronics Engineering, University of Waterloo, 200
University Avenue West, Waterloo, Ontario N2L 3G1, Canada 2 Department of Applied Mathematics, University of Waterloo, 200 University Avenue West,
This paper studies the optimization problem of power management in plug-in hybrid electric vehicles (PHEVs) subject to uncertain and dynamical driving cycles. Most existing power management strategies are designed for a fixed or specific driving cycle in the scenario that the trip information is assumed known a priori, which usually encounter implementation difficulties in practice once the driving cycle becomes unknown and time-varying. To solve this problem, we present a stochastic driving cycle model and utilize finite-horizon stochastic dynamic programming (SDP) to globally optimize vehicle performance in stochastic sense. Simulation results show that the proposed strategy makes a significant progress in improving fuel economy.
Keywords: plug-in hybrid electric vehicles, power split, power management, optimal control, stochastic dynamic programming
1. Introduction
With increasing fuel prices, aggravating air pollution and a looming global energy crisis in the next decade, energy and environmental sustainability has become a major concern in the contemporary automotive industry. One of promising solutions is to alternatively use electricity powertrain directly charged from the electric grid where energy is mainly generated from renewable sources such as wind energy, solar energy, nuclear energy, etc., to completely or partially replace the propulsion power of internal combustion engine (ICE). Hybrid electric vehicles (HEVs) with dual-power-source were presented under these circumstances. As an upgraded version of HEVs, PHEVs consisting of an ICE, multiple electric motors/generators and an energy storage system (ESS) use both fuel and electricity for propulsion and can obtain electricity through onboard generation or by plugging into the electric grid. Different from electric vehicles (EVs), PHEVs not only possess the all-electric capability in urban areas like EVs but also have the ability for extended range capability because of a small onboard ICE. Compared with conventional HEVs, PHEVs have the potential to operate in all-electric range (AER) mode over a more significant distance, which is directly responsible for fuel economy. Currently, interest in PHEVs is fast growing among consumers, automotive companies, electric utilities and policy makers [1–10]. Although the hybridization of powertrain of PHEVs brings a lot of benefits to reduction of fuel consumption and pollution emissions, it also makes the power management of PHEVs more
EIC Climate Change Technology Conference 2013
2
complex, i.e., how should the control strategy determine the proper power level to be generated and how should it assign power split between the two power sources to meet overall power demand of driving cycles? The literature has provided some approaches to regulate the power management of PHEVs, most of which are extended from those for conventional (non-plug-in) hybrids. According to the different mathematical approaches used, control strategies can be commonly classified into two types: rule-based and optimization-based [11–14]. Rule-based control strategies such as deterministic [15–19] and fuzzy rule-based controllers [20, 21] split the power demand within the vehicle only depending on the vehicle’s current state and input variables (vehicle/engine velocity, state of charge (SOC) of ESS, power demand, etc.) through predefined rule map, which are easy to implement in reality while in general only locally optimal performance is obtained, not the globally optimal solution. Optimization-based control strategies require knowledge of future power demand and then use it to find out a set of optimal control actions to specify the future output of each actuator in order to achieve the global optimization. For a fixed driving cycle known a priori, deterministic dynamic programming (DDP) [22], quadratic programming [23] and neural network [24] methods can be used to solve this globally optimal problem. However, these control strategies are not implementable in practice due to their preview nature and heavy computational requirement, usually treated as a design tool to analyze, assess, and adjust other rule-based strategies. Recently, a sliding model control approach was studied to improve efficiency in series HEVs [25]. Particle swarm optimization (PSO) technique was utilized to optimize the Parallel HEV powertrain [26]. Adaptive equivalent consumption minimization strategy (A-ECMS) was presented for real-time energy management in HEV [27]. Global positioning system (GPS), geographic information system (GIS) and advanced traffic flow modeling techniques were adapted to predict the future trip [18, 28, 29]. Specifically, SDP was presented to optimize power management over a probabilistic distribution of drive cycles, rather than a single cycle [30–32]. It is implementable because the future power demand is modeled as a Markov process in an infinite-horizon to represent the uncertainty of the future drive power required under diverse cycle conditions. A trip-based optimal power management significantly reduced the fuel consumption by modeling the drive cycle on the historic traffic information, which indicates that driving cycles play a critical rule in optimization of power management [29]. For an individual driver, he possibly chooses different trips for his commuting to avoid heavy traffic on different days. Even for the same trip, different drivers also possibly drive at different speeds depending on their driving habits and traffic conditions. Thus, driving cycles are uncertain and dynamical subject to the diversity of drivers. In this paper, to fully realize the potential of PHEVs in reducing fuel consumption and emissions, we firstly construct a stochastic driving cycle model, which consists two parts: power demand transition probability (PDTP) and commuting time distribution (CTD) deriving from the historic record of the individual driver. Furthermore, a driver-oriented control strategy is presented to globally optimize power management in PHEVs. Unlike infinite-horizon SDP used for most stochastic driving cycles where it is difficult to choose the proper discount constant which guarantees the convergence of the corresponding algorithm while it indeed impacts the final optimization results, our optimization algorithm is designed on finite-horizon SDP where no discount constant is required. Further simulation results verify the proposed optimization strategy is effective and could achieve significant improvement in reducing fuel consumption and emissions. The remainder of this paper is organized as follows. In Section 2, the hybrid configurations of powertrain, internal dynamics of vehicles and problem formulation are demonstrated. In Section 3, a stochastic driving cycle model is constructed based on the historic record of vehicle speed and commuting time of the individual driver. In Section 4, finite-horizon stochastic dynamic
EIC Climate Change Technology Conference 2013
3
programming is utilized to optimize the performance (fuel economy, nitrogen oxides (NOx) and particulate matters (PM) emissions) of PHEVs. Section 5 discusses the simulation results of the proposed driver-oriented control strategy. Finally, conclusions are given in Section 6.
2. Preliminaries
2.1 Hybrid powertrain configuration
Essentially, PHEVs provide higher fuel economy and less emissions due to their hybridization of powertrain. i.e., the dual-power-source nature, with which PHEVs can utilize both fuel and electricity for propulsion. Generally, there are three types of hybrid configurations: series, parallel and power split (series/parallel) as shown in Fig. 1 [33]. In series hybrid configuration, only the electric motor which obtains electricity from the battery pack provides propulsion to the transmission. The engine does not directly provide propulsion to the transmission but drives the electric generator to generate electricity for the battery pack when required. In parallel hybrid configuration, both the electric motor and the engine can actuate the transmission alone or together, depending on the power demand of the driving cycle. A coupler is utilized to assemble their propulsions when they work together. In power split configuration, there are four main drivetrain combinations: (1) the electric motor drives the transmission alone; (2) the engine drives the transmission alone; (3) the electric motor and engine drive the transmission together; and (4) the engine drives the transmission and actuates the generator to charge the battery simultaneously. Sometimes the engine works with the electric motor to drive the transmission and also actuates the generator to charge the battery at the same time. Although it is not an effective mode, it practically happens in PHEVs equipped with the planet gear set [34, 35]. Compared with the first two configurations, power split configuration possesses a more flexible regulation and control on power management of PHEVs and takes both advantages of them. Thus, our study mainly focuses on power split in this paper.
Figure 1: Hybrid powertrain configurations of PHEVs, (a) series; (b) parallel; and (c) power split.
2.2 Vehicle dynamics
Before studying the power management problem, we firstly introduce the internal dynamics of PHEVs. To model the power demand, we have
EIC Climate Change Technology Conference 2013
4
vFP tracdem = ,
where tracF is the tractive force demand and v is the vehicle speed. The force diagram is
shown in Fig. 2 (a). Following the Newtonian formula, the corresponding governing equation [31] is given by
dt
dvmFFFF fricaerorolltrac =−−− , (1)
where rollF , aeroF and fricF are the rolling resistance, the aerodynamic resistance and the
wheel/axle bearing friction resistance, respectively, m is the vehicle mass and dt
dv is the
accelerated speed. Furthermore, the rolling resistance term could be described by
mgFroll µ= ,
where g and µ are the acceleration of gravity and the rolling resistance coefficient,
respectively. The aerodynamic resistance term could be calculated by
2
2
1vCAF dfaero ρ= ,
where ρ is the density of air, fA is the effective frontal area of the vehicle, and dC is the
effective aerodynamic drag coefficient. The wheel/axle bearing friction satisfies
tire
wfric
r
vbF = ,
where wb is the bearing friction coefficient and tirer is the effective tire radius. The above
equation is for a horizontal road. When the slope appears, the governing equation turns into
dt
dvmmg
r
vbvCAmgF
tire
wdftrac ++++= )sin(
2
1)cos(
2 θρθµ ,
where θ is the corresponding slope angle and the vehicle is climbing as shown in Fig. 2 (b).
( a ) ( b ) Figure 2: Force diagram of PHEVs, (a) driving on the horizontal road; (b) driving on the slope. The battery of PHEVs could be modeled as an open-circuit as shown in Fig. 3, described by
ib
ib
RQ
RPVVSOC
2
42
00 −−−=
•
,
EIC Climate Change Technology Conference 2013
5
where SOC is the state of charge of the battery ( 10 ≤≤ SOC ), i.e., the ratio of charge stored
to the maximum charge bQ , 0V is the open-circuit voltage and iR is the internal resistance
which is related to SOC . bP is the instantaneous power delivered by the battery,
gggmmmb TTP ηωηω += −1,
where mT and gT are the torques produced by the electric motor and generator, mω and gω
are the corresponding rotation speeds, and mη and gη are the corresponding effective
coefficients, respectively.
Figure 3: Open-circuit of the battery of PHEVs.
2.3 Problem formulation
Since any driving cycle is uncertain and dynamical depending on the individual driver’s driving habit and real-time traffic, DDP-based optimal control strategies which are designed for fixed driving cycles inevitably result in the implementation difficulty in practice when driving cycles are unknown and time-varying. To more accurately model the driving cycle subject to uncertainty and dynamical characteristic, a stochastic driving cycle is more suitable to address this practical scenario. Accordingly, how to optimize the power management of PHEVs in the stochastic sense becomes an active problem.
3. Stochastic Driving Model
For computation convenience, we discretize the state of PHEVs as follows,
},...,,{21 vN
vvvv ∈ ,
},...,,{21 pN
demdemdemdem PPPP ∈ ,
},...,,{21 sN
SOCSOCSOCSOC ∈ ,
where vN , pN and sN are positive integers and )}(),(),({)( kSOCkPkvkx dem= is the vehicle
state at time k . A stochastic driving model consists of two parts, the power demand transition
probability and the commuting time distribution. The following assumption is required in our modeling process.
EIC Climate Change Technology Conference 2013
6
Assumption 1: assume that the power demand of the driving cycle is a Markov process, i.e., the future power demand only depends on the current state of the vehicle and is independent on the past.
3.1 Power demand transition probability
Define
})(,)(|)1(Pr{,,
j
demdem
il
demdemlji PkPvkvPkPp ===+= ,
where vNi ,...,2,1= , pNj ,...,2,1= and pNl ,...,2,1= . For an individual driver, his power demand
transition probability could be derived from the historic record of his vehicle speed. For
instance, support that rNrr ivv ×= 1)}({ is his speed record in the last month, where rN is the
number of record instants. In terms of Eq. (1), we obtain the corresponding historic power demand by
)())()1(()(
)(2
1)()(
2
3kvkvkvm
r
kvbkvCAkmgvkP rrr
tire
rwrdfrr −++++= ρµ ,
where rNk ,...,2,1= and the time interval of speed record is one second.
Map rv and rP into },...,,{21 vN
vvv and },...,,{21 pN
demdemdem PPP utilizing the maximum likelihood
estimation method [36] and then denote the number of =+== )1(,)(,)(|{ kPPkPvkvk r
j
demr
i
r
}l
demP by ),,( ljiNvpp and the number of })(,)(|{j
demr
i
r PkPvkvk == by ),( jiN vp . The power
demand transition probability could be calculated as follows,
),(
),,(
,,
jivp
ljivpp
ljiN
Np = , for vNi ,...,2,1= , pNj ,...,2,1= and pNl ,...,2,1= .
Obviously,
11
,, =∑=
pN
l
ljip .
Define the power demand transition probability matrix
ppv NNNljipPDTPM ××= }{ ,, .
3.2 Commuting time distribution
The other component of a stochastic driving cycle is the commuting time distribution of the
individual driver, which could be derived from his historic commuting time trNrr iTT ×= 1)}({ ,
where trN is the number of record days. Define
)}({min1
min iTT rNi tr≤≤
= , )}({max1
max iTT rNi tr≤≤
= .
We obtain the commuting time probability by
tr
rrr
tN
TkTikTkofnumbertheip
})(,)(|{)(
∈== ,
EIC Climate Change Technology Conference 2013
7
where maxminmin ,...,1, TTTi += . Further define the tail function as follows,
∑≤≤
−=ij
tt jpiF1
)(1)( .
4. Optimization Control
Dynamic programming (DP) [37] is a powerful tool in solving optimization problem, which refers to simplifying a complicated problem by breaking it down into a sequence of subproblems over time in a recursive manner. The optimal solutions of these subproblems form the global optimal solution of the original problem, which is called as “Principle of Optimality”. Compared with the method of exhaustion, DP reduces the number of computations by solving the subproblem once and storing the optimal solution for the next time the same solution is needed, which is simply looked up. The key point of DP is to construct the recursive relationship between two sequential subproblems such that the principle of optimality is satisfied.
4.1 Objective function
The goal of power management of PHEVs is to improve the fuel economy and to reduce the pollution emissions as much as possible. Thus, in this paper we define the global problem is to
optimize the fuel consumption and emissions over above stochastic driving cycle and the k -th
subproblem is to optimize the fuel consumption and emissions starting from time k to the cycle
end in the stochastic sense, for max,...,2,1 Tk = . Firstly, for each step (one second), the
where α , ϕ and ω are the corresponding weighting factors of electricity, NOx and PM
emissions, rated to fuel. Following the definition of the k -th subproblem, the k -th objective
could be described by
))](,([)())(,(max
iiii
T
ki
Ptkkkk xuxgEiFxuxJdem∑
=
= ,
where ix and )( ii xu denote the vehicle state and the control action at time i , respectively, and
))](,([ iiiiP xuxgEdem
is the average instantaneous cost. Furthermore, we obtain the following
recursion equation:
)))}(,())](,([)(({min))(,( 1111)(
+++++= kkkkkkkkPtxu
kkkk xaxJxuxgEiFxaxJdem
kk
,
where )()(*
kkkk xuxa = is the optimal action at time k .
4.2 Constraints
To optimize power management of PHEVs, optimization constraints should consist of the state evolution equation and bounds on the vehicle state variables, which can be described by
))(,(1 kkkk xuxfx =+ ,
Xxk ∈ ,
Uuk ∈ ,
where )(⋅f denotes the dynamics of the vehicle components (engine, electric motor, electric
generator and battery) and X , U the state and control sets, respectively.
EIC Climate Change Technology Conference 2013
8
4.3 Algorithm realization
Our optimization procedure is summarized in Fig. 4, which is based on finite-horizon SDP approach. Firstly, for an individual driver, we calculate the power demand transition probability
ljip ,, from his vehicle speed record and the commuting time distribution )(kpt , tail function
)(kFt from his commuting time record. Thus, we obtain a stochastic driving cycle with
))(,( ,, kFp tlji . Secondly, optimize backward each cost function ))(,( kkkk xuxJ from maxTk = to
1=k and store the corresponding optimal control actions )( kk xa . Thirdly, calculate the vehicle
performance (fuel economy, NOx and PM emissions, etc.) over above stochastic driving cycle according to optimal control actions. The detailed algorithm realization of finite-horizon SDP is shown in Tab. 1.
Figure 4: Driver-oriented optimization process of power management in PHEVs.
5. Simulation and Analysis
In this section, driver-oriented control strategy of power management is simulated on a mid-size sedan. Vehicle performance is discussed in detail.
5.1 PHEV configuration
A mid-size sedan is utilized in implementation of the proposed optimization control strategy as shown in Tab. 2, which is similar with the 2002 Toyota Prius, except with a larger battery capacity, i.e., 80 modules of Ni-MH batteries are adapted to highlight the benefit of PHEVs [31]. The SOC of the battery pack is limited between 30% and 90%. The bounds of engine torque
and speed are set as NmTe 1200 ≤≤ and rpmvrpm e 40001000 ≤≤ , respectively. The bounds
of electric motor torque and speed are set as NmTm 3050 ≤≤ and rpmvm 60000 ≤≤ ,
EIC Climate Change Technology Conference 2013
9
respectively. The bounds of electric generator torque and speed are set as NmTg 550 ≤≤ and
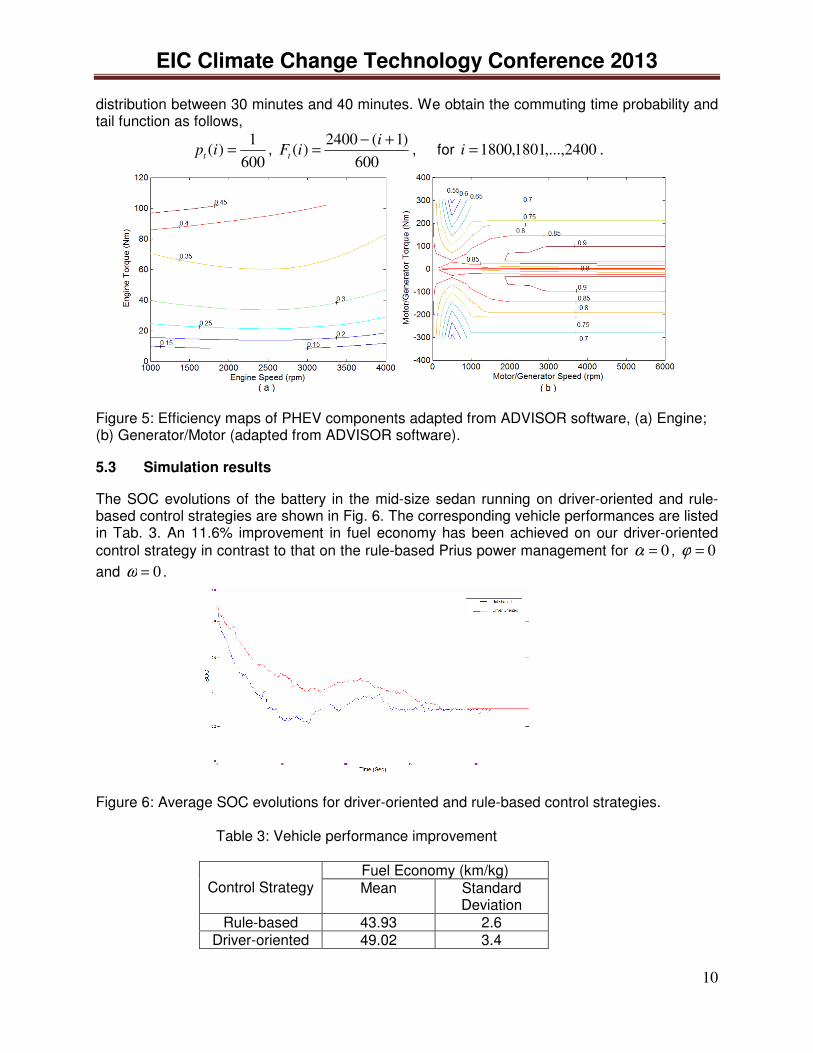
rpmvg 55000 ≤≤ , respectively. The corresponding efficiency maps are shown in Fig. 5.
Table 1: Algorithm realization of finite-horizon SDP 1 Calculate the instantaneous cost function:
for each mSOCkSOC =)( , sNm ,...,2,1= , calculate ))(,(),;,,( kkkk xuxgnmljig =
and obtain the corresponding power split
)},;,,(),,;,,({),;,,( nmljiPnmljiPnmljiu mge= ,
where nSOCkSOC =+ )1( , sNn ,...,2,1= .
Thus, we have instantaneous cost matrix ssppv NNNNNnmljigICM ××××= )},;,,({ .
2 Furthermore, we obtain the expectation matrix of instantaneous cost
sspv
p
NNNNlji
N
lpnmljigEMIC ×××=
⋅= ∑ }),;,,({ ,,1.
3 Let maxTk = , 0))(,( =kkkk xaxg , 0))(,( =kkkk xaxJ and 1)( SOCkSOC = . −−k
4 Calculate ]),;,()([min),;,,( 1},...,2,1{
+∈
+= ktNm
k JnmjiEMICkFnmljiJs
and record this optimal *
, )( mkSOC ji = .
Thus, the optimal control action is ),;,,(),;,,(** nmljiunmljia = .
−−k
5 Repeat Step 4 till 0=k .
6 Thus, )(, kSOC ji is the optimal battery state and ))1(),(;,,( ,, +kSOCkSOCljia jiji
is the corresponding optimal control action at each time k .
Table 2: PHEV model component parameters Vehicle EPA Classification
Weight Mid-size sedan 1372KG
Engine Type Displacement Maximum Power Maximum Torque
Cell Chemistry Nominal Voltage Nominal Capacity Number of Modules Pack Energy Capacity
Ni-MH 1.2 V per cell 6.0 A-h per cell 80 3.7k Wh
5.2 Stochastic driving cycle model
10 FTP-72 and 10 US06 driving cycles connected back-to-back are assumed as the historic record of vehicle speed. The commuting time distribution is assumed to follow uniform
EIC Climate Change Technology Conference 2013
10
distribution between 30 minutes and 40 minutes. We obtain the commuting time probability and tail function as follows,
600
1)( =ipt ,
600
)1(2400)(
+−=
iiFt , for 2400,...,1801,1800=i .
Figure 5: Efficiency maps of PHEV components adapted from ADVISOR software, (a) Engine; (b) Generator/Motor (adapted from ADVISOR software).
5.3 Simulation results
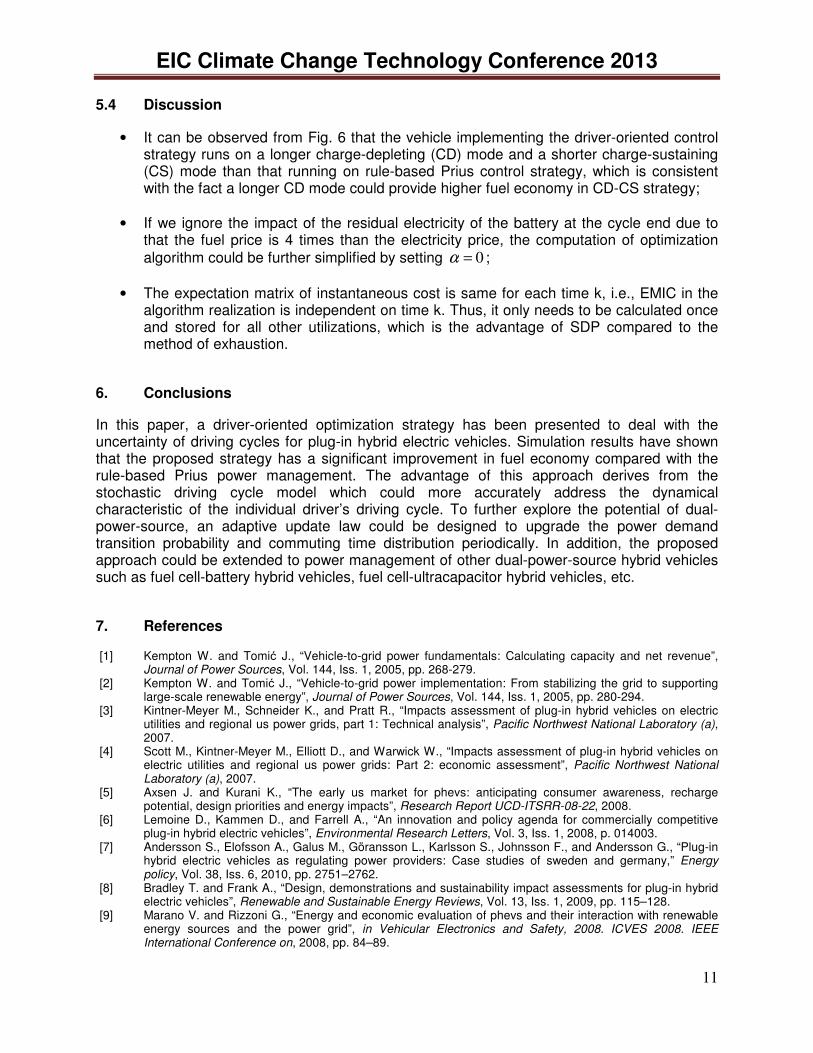
The SOC evolutions of the battery in the mid-size sedan running on driver-oriented and rule-based control strategies are shown in Fig. 6. The corresponding vehicle performances are listed in Tab. 3. An 11.6% improvement in fuel economy has been achieved on our driver-oriented
control strategy in contrast to that on the rule-based Prius power management for 0=α , 0=ϕ
and 0=ω .
Figure 6: Average SOC evolutions for driver-oriented and rule-based control strategies. Table 3: Vehicle performance improvement
Control Strategy
Fuel Economy (km/kg) Mean Standard
Deviation Rule-based 43.93 2.6
Driver-oriented 49.02 3.4
EIC Climate Change Technology Conference 2013
11
5.4 Discussion
• It can be observed from Fig. 6 that the vehicle implementing the driver-oriented control strategy runs on a longer charge-depleting (CD) mode and a shorter charge-sustaining (CS) mode than that running on rule-based Prius control strategy, which is consistent with the fact a longer CD mode could provide higher fuel economy in CD-CS strategy;
• If we ignore the impact of the residual electricity of the battery at the cycle end due to that the fuel price is 4 times than the electricity price, the computation of optimization
algorithm could be further simplified by setting 0=α ;
• The expectation matrix of instantaneous cost is same for each time k, i.e., EMIC in the algorithm realization is independent on time k. Thus, it only needs to be calculated once and stored for all other utilizations, which is the advantage of SDP compared to the method of exhaustion.
6. Conclusions
In this paper, a driver-oriented optimization strategy has been presented to deal with the uncertainty of driving cycles for plug-in hybrid electric vehicles. Simulation results have shown that the proposed strategy has a significant improvement in fuel economy compared with the rule-based Prius power management. The advantage of this approach derives from the stochastic driving cycle model which could more accurately address the dynamical characteristic of the individual driver’s driving cycle. To further explore the potential of dual-power-source, an adaptive update law could be designed to upgrade the power demand transition probability and commuting time distribution periodically. In addition, the proposed approach could be extended to power management of other dual-power-source hybrid vehicles such as fuel cell-battery hybrid vehicles, fuel cell-ultracapacitor hybrid vehicles, etc.
7. References
[1] Kempton W. and Tomić J., “Vehicle-to-grid power fundamentals: Calculating capacity and net revenue”, Journal of Power Sources, Vol. 144, Iss. 1, 2005, pp. 268-279.
[2] Kempton W. and Tomić J., “Vehicle-to-grid power implementation: From stabilizing the grid to supporting large-scale renewable energy”, Journal of Power Sources, Vol. 144, Iss. 1, 2005, pp. 280-294.
[3] Kintner-Meyer M., Schneider K., and Pratt R., “Impacts assessment of plug-in hybrid vehicles on electric utilities and regional us power grids, part 1: Technical analysis”, Pacific Northwest National Laboratory (a), 2007.
[4] Scott M., Kintner-Meyer M., Elliott D., and Warwick W., “Impacts assessment of plug-in hybrid vehicles on electric utilities and regional us power grids: Part 2: economic assessment”, Pacific Northwest National Laboratory (a), 2007.
[5] Axsen J. and Kurani K., “The early us market for phevs: anticipating consumer awareness, recharge potential, design priorities and energy impacts”, Research Report UCD-ITSRR-08-22, 2008.
[6] Lemoine D., Kammen D., and Farrell A., “An innovation and policy agenda for commercially competitive plug-in hybrid electric vehicles”, Environmental Research Letters, Vol. 3, Iss. 1, 2008, p. 014003.
[7] Andersson S., Elofsson A., Galus M., Göransson L., Karlsson S., Johnsson F., and Andersson G., “Plug-in hybrid electric vehicles as regulating power providers: Case studies of sweden and germany,” Energy policy, Vol. 38, Iss. 6, 2010, pp. 2751–2762.
[8] Bradley T. and Frank A., “Design, demonstrations and sustainability impact assessments for plug-in hybrid electric vehicles”, Renewable and Sustainable Energy Reviews, Vol. 13, Iss. 1, 2009, pp. 115–128.
[9] Marano V. and Rizzoni G., “Energy and economic evaluation of phevs and their interaction with renewable energy sources and the power grid”, in Vehicular Electronics and Safety, 2008. ICVES 2008. IEEE International Conference on, 2008, pp. 84–89.
EIC Climate Change Technology Conference 2013
12
[10] Peterson S., Whitacre J., and Apt J., “The economics of using plug-in hybrid electric vehicle battery packs for grid storage,” Journal of Power Sources, Vol. 195, Iss. 8, 2010, pp. 2377–2384.
[11] Chan C., “The state of the art of electric, hybrid, and fuel cell vehicles”, Proceedings of the IEEE, Vol. 95, Iss. 4, 2007, pp. 704–718.
[12] Salmasi F., “Control strategies for hybrid electric vehicles: Evolution, classification, comparison, and future trends”, Vehicular Technology, IEEE Transactions on, Vol. 56, Iss. 5, 2007, pp. 2393–2404.
[13] Pisu P. and Rizzoni G., “A comparative study of supervisory control strategies for hybrid electric vehicles”, Control Systems Technology, IEEE Transactions on, Vol. 15, Iss. 3, 2007, pp. 506–518.
[14] Wirasingha S. and Emadi A., “Classification and review of control strategies for plug-in hybrid electric vehicles”, Vehicular Technology, IEEE Transactions on, Vol. 60, Iss. 1, 2011, pp. 111–122.
[15] Jalil N., Kheir N., and Salman M., “A rule-based energy management strategy for a series hybrid vehicle”, in American Control Conference, 1997. Proceedings of the 1997, Vol. 1, 1997, pp. 689–693.
[16] Phillips A., Jankovic M., and Bailey K., “Vehicle system controller design for a hybrid electric vehicle”, in Control Applications, 2000. Proceedings of the 2000 IEEE International Conference on, 2000, pp. 297–302.
[17] Hofman T., Steinbuch M., Van Druten R., and Serrarens A., “Rule-based energy management strategies for hybrid vehicles”, International Journal of Electric and Hybrid Vehicles, Vol. 1, Iss. 1, 2007, pp. 71–94.
[18] Banvait H., Anwar S., and Chen Y., “A rule-based energy management strategy for plug-in hybrid electric vehicle (phev)”, in American Control Conference, 2009. ACC’09., 2009, pp. 3938–3943.
[19] Same A., Stipe A., Grossman D., and Park J., “A study on optimization of hybrid drive train using advanced vehicle simulator (advisor)”, Journal of Power Sources, Vol. 195, Iss. 19, 2010, pp. 6954–6963.
[20] Schouten N., Salman M., and Kheir N., “Fuzzy logic control for parallel hybrid vehicles”, Control Systems Technology, IEEE Transactions on, Vol. 10, Iss. 3, 2002, pp. 460–468.
[21] Lee H. and Sul S., “Fuzzy-logic-based torque control strategy for parallel-type hybrid electric vehicle”, Industrial Electronics, IEEE Transactions on, Vol. 45, Iss. 4, 1998, pp. 625–632.
[22] Lin C., Peng H., Grizzle J., and Kang J., “Power management strategy for a parallel hybrid electric truck”, Control Systems Technology, IEEE Transactions on, Vol. 11, Iss. 6, 2003, pp. 839–849.
[23] Koot M., Kessels J., De Jager B., Heemels W., Van den Bosch P., and Steinbuch M., “Energy management strategies for vehicular electric power systems”, Vehicular Technology, IEEE Transactions on, Vol. 54, Iss. 3, 2005, pp. 771–782.
[24] Moreno J., Ortúzar M., and Dixon J., “Energy-management system for a hybrid electric vehicle, using ultracapacitors and neural networks”, Industrial Electronics, IEEE Transactions on, Vol. 53, Iss. 2, 2006, pp. 614–623.
[25] Gokasan M., Bogosyan S., and Goering D., “Sliding mode based powertrain control for efficiency improvement in series hybrid-electric vehicles”, Power Electronics, IEEE Transactions on, Vol. 21, Iss. 3, 2006, pp. 779–790.
[26] Wu J., Zhang C., and Cui N., “Pso algorithm-based parameter optimization for hev powertrain and its control strategy”, International Journal of Automotive Technology, Vol. 9, Iss. 1, 2008, pp. 53–59.
[27] Musardo C., Rizzoni G., Guezennec Y., and Staccia B., “A-ecms: An adaptive algorithm for hybrid electric vehicle energy management”, European Journal of Control, Vol. 11, Iss. 4-5, 2005 p. 509.
[28] Rajagopalan A. and Washington G., “Intelligent control of hybrid electric vehicles using gps information”, SAE Technical Paper, 2002, pp. 01–1936.
[29] Gong Q., Li Y., and Peng Z., “Trip-based optimal power management of plug-in hybrid electric vehicles”, Vehicular Technology, IEEE Transactions on, Vol. 57, Iss. 6, 2008, pp. 3393–3401.
[30] Lin C., Peng H., and Grizzle J., “A stochastic control strategy for hybrid electric vehicles”, in American Control Conference, 2004. Proceedings of the 2004, Vol. 5, 2004, pp. 4710–4715.
[31] Moura S., Fathy H., Callaway D., and Stein J., “A stochastic optimal control approach for power management in plug-in hybrid electric vehicles”, Control Systems Technology, IEEE Transactions on, Vol. 19, 2011, pp. 545 –555.
[32] Bashash S., Moura S., Forman J., and Fathy H., “Plug-in hybrid electric vehicle charge pattern optimization for energy cost and battery longevity”, Journal of Power Sources, Vol. 196, Iss. 1, 2011, pp. 541–549.
[33] Freyermuth V., Fallas E., and Rousseau A., “Comparison of powertrain configuration for plug-in hevs from a fuel economy perspective”, SAE paper, 2008, p. 0461.
[34] Muta K., Yamazaki M., and Tokieda J., “Development of new-generation hybrid system ths iidrastic improvement of power performance and fuel economy”, SAE paper, Iss. 2004-01, 2004, p. 0064.
[35] Staunton R., Ayers C., Chiasson J., Burress B., and Marlino L., “Evaluation of 2004 toyota prius hybrid electric drive system”, Special Report, U.S. Department of Energy, 2006.
[36] Johansen S. and Juselius K., “Maximum likelihood estimation and inference on cointegrationwith applications to the demand for money”, Oxford Bulletin of Economics and statistics, Vol. 52, Iss. 2, 1990, pp. 169–210.
[37] Bertsekas D., “Dynamic programming and optimal control”, Athena Scientific Belmont, MA, 1995.