Einsatz des Robotersystems NAO in der Ergotherapie bei autistischen Kindern in Österreich Ein Literaturreview und eine qualitative Erhebung Usage of the robot NAO in occupational therapy for children with ASD in Austria A Scoping Review and a qualitative study Masterarbeit Zur Erlangung des akademischen Grades Master of Science in Natural Sciences der Fachhochschule FH Campus Wien Masterstudiengang: Health Assisting Engineering Vorgelegt von: Viktoria Müllauer Personenkennzeichen: c1610720027 Erstbetreuer / Erstbegutachter: Franz, Werner, Dipl.-Ing, Mag. Zweitbetreuerin / Zweitbegutachterin Univ.-Prof.in Mag.a Dr.in Tanja Stamm, PhD MSc MBA Eingereicht am: 27. 07. 2018
Transcript
Einsatz des Robotersystems NAO in der Ergotherapie bei autistischen Kindern in
Österreich Ein Literaturreview und eine qualitative Erhebung
Usage of the robot NAO in occupational therapy for
children with ASD in Austria A Scoping Review and a qualitative study
Masterarbeit
Zur Erlangung des akademischen Grades
Master of Science in Natural Sciences
der Fachhochschule FH Campus Wien
Masterstudiengang: Health Assisting Engineering
Vorgelegt von:
Viktoria Müllauer
Personenkennzeichen:
c1610720027
Erstbetreuer / Erstbegutachter:
Franz, Werner, Dipl.-Ing, Mag.
Zweitbetreuerin / Zweitbegutachterin
Univ.-Prof.in Mag.a Dr.in Tanja Stamm, PhD MSc MBA
Eingereicht am:
27. 07. 2018
Erklärung:
Ich erkläre, dass die vorliegende Masterarbeit von mir selbst verfasst wurde und ich keine
anderen als die angeführten Behelfe verwendet bzw. mich auch sonst keiner unerlaubter
Hilfe bedient habe.
Ich versichere, dass ich diese Masterarbeit bisher weder im In- noch im Ausland (einer
Beurteilerin/einem Beurteiler zur Begutachtung) in irgendeiner Form als Prüfungsarbeit
vorgelegt habe.
Weiters versichere ich, dass die von mir eingereichten Exemplare (ausgedruckt und
elektronisch) identisch sind.
Datum: 28.06.2018 .............. Unterschrift:
i
Vorwort
Es ist Zeit „Danke“ zu sagen. Nach mühevollen Tagen und Nächten ist es endlich
vollbracht, meine Masterarbeit ist fertig. Doch alleine, ohne die Unterstützung meiner
Eltern, meiner Schwester, meinen ProfessorInnen und meinen FreundInnen, wäre dies
nicht möglich gewesen.
Mein größter Dank gilt vor allem meinen Eltern. Durch ihre Liebe und Unterstützung
konnte ich Hürden und Probleme meistern und schwierige Zeiten überwinden. Sie halfen
mir meine Ziele zu verfolgen und zeigten mir die wichtigen Dinge im Leben. Auch meiner
Schwester möchte ich „Danke“ sagen. Sie war stets für mich da und holte mich, bei
Verzweiflung und Frust, auf den Boden der Tatsachen zurück. Der Zusammenhalt meiner
Familie ist ein wahres Kraftwerk für mich und festigt mich jeden Tag meines Lebens.
Glück, Gesundheit und meine Familie sind wohl die wichtigsten Dinge in meinem Leben.
Ein weiterer Dank gilt meinem Betreuer und Studiengangsleiter Herrn Dipl.-Ing. Mag.
Franz Werner. Durch sein Fachwissen, seine Ideen und Vorschläge konnte diese Arbeit
heranreifen und wachsen. Bei Fragen, Unsicherheiten und sonstigen Anliegen konnte ich
mir sowohl persönlich, als auch per Mail Hilfe holen. Auch bei Univ.-Prof.in Mag.a Dr.in
Tanja Stamm, PhD, MSc, MBA möchte ich mich für ihre Ratschläge und ihre
Hilfestellungen bedanken.
Erwähnen möchte ich zudem noch meine Freundinnen. Mit Daniela Kulnig BSc. konnte
ich die langen FH Tage und oftmals mühevollen Stunden lachend und mit Zuversicht und
Ehrgeiz meistern. Unsere Freundschaft entwickelte sich von anfänglichen
Studienkolleginnen zu beinahe Seelenverwandten. Danke auch an Barbara Fridrich und
Sandra Lauter, welche während dieser Zeit für Ablenkungen und unbeschwerte Momente
sorgten.
Außerdem möchte ich mich bei meinen KorrekturleserInnen, vor allem bei Kathrin
Wagner, und den teilnehmenden Ergotherapeutinnen herzlichst bedanken. Ohne ihr
Fachwissen und ihre Bereitschaft wäre diese Masterarbeit nicht zu Stande gekommen.
„Leider läßt sich eine wahrhafte Dankbarkeit mit Worten nicht ausdrücken.“
Johann Wolfgang von Goethe
ii
Kurzfassung
1 von 160 Kindern ist von Autismus betroffen und bedarf einer therapeutischen
Behandlung (WHO, 2017). Durch den technischen Fortschritt werden zunehmend
Studien mit „sozial-assistierenden Roboter“, als unterstützende Therapiemaßnahme
durchgeführt. Diese Arbeit fokussiert sich auf Möglichkeiten und Grenzen des Einsatzes
des Robotersystems NAO in der Ergotherapie bei autistischen Kindern in Österreich.
Es wurde ein Scoping Review bestehend aus 14 Interventionsstudien über NAO der
Jahre 2007-2017 mittels einer Meshtermsuche in Pubmed, CINAHL und
ergotherapeutischen Fachzeitschriften erstellt. Als weiterer Schritt wurden zwei
Diskussionsrunden mit je zwei Ergotherapeutinnen und ein Einzelinterview durchgeführt.
Um gezieltere Ergebnisse zu erhalten, fand ergänzend ein Expertinneninterview mit einer
Therapeutin mit Erfahrung über Therapierobotik statt. Die Ergotherapeutinnen wiesen
mindestens ein halbes Jahr Berufserfahrung mit autistischen Kindern auf. In den
Diskussionsrunden wurden vier Interventionsvideos von NAO präsentiert und
anschließend reflektiert. Die inhaltliche Auswertung fand nach der „Thematischen
Analyse“ (Braun & Clarke, 2006) statt.
Die Ergebnisse dieser Arbeiten bestätigen zwar das große Interesse bei autistischen
Kindern, für eine vollständige Implementierung fehlen jedoch noch Evidenzen betreffend
eines erfolgreichen Alltagstransfers. Auch Bedenken bezüglich einer Reduktion der
Mensch-zu-Mensch-Interaktion sind zu beachten. NAO könnte in Zukunft in verschiedene
ergotherapeutische Therapiemethoden, als Ritual, Motivator, Anleiter oder
Zwischenelement, genützt werden. Je nach Zielgruppe, Therapieziel und
Therapiemaßnahme könnte NAO individuell seinen Einsatz finden.
Resümierend kann gesagt werden, dass Potential in der robotergestützten Therapie
steckt. Es ist wichtig zu wissen, dass NAO eine/n TherapeutIn bzw. eine Mensch-zu-
Mensch Interaktion nicht ersetzen kann. Um den Roboter in Zukunft effizient einsetzen zu
können, bedarf es jedoch an weiterer Forschung bezogen auf die Durchführung von
Langzeitstudien und Studien über den Alltagstransfer.
iii
Abstract
1 in 160 children has been diagnosed with autism spectrum disorder (WHO, 2017). Due
to technical progress "social assisting robots" are used as a new treatment tool. The aim
of this master thesis was to explore the possibilities and limitations of the use of the robot
system NAO in occupational therapy in autistic children in Austria.
Firstly, a scoping review consisting of 14 intervention studies with NAO from 2007-2017
was performed by a mesh term search in different databases. Furthermore, two expert
discussions each with 2 occupational therapists and one individual interview were
conducted. In order to obtain more targeted results, an expert interview with a therapist
with experience with robots was added. The occupational therapists had at least half a
year of professional experience with autistic children. Within the discussion groups and
the individual interview 4 videos of NAO were presented. The interviews were analysed
using a thematic analysis (Braun & Clarke, 2006).
The results show, that in the future it could be possible to integrate NAO in some
occupational therapy concepts. Depending on the therapy goal, target group and
therapeutic intervention the robot can be used as a ritual, motivator or intermediate
element. However, there are also some critical factors like the little knowledge about a
generalisation in real life. The obsession of the children with the robot is a critical fact,
too.
In summary, it can be said that robot-assisted therapy has potential, but there is still too
little evidence for an implementation. It is important to know, that NAO cannot replace a
therapist or a real interaction. In order to get more information about how NAO can be
used efficiently there is a strong need for further studies.
iv
Abkürzungsverzeichnis
ABA Applied behavioral analysis
ADL Aktivitäten des täglichen Lebens
ASS Autismus Spektrum Störung
BOT Bruininks-Oseretzky Test der motorischen Fähigkeiten
FSIQ Full Scale Intelligence Quotient
ICD International Statistical Classification of Diseases and Related Health
Problems
IQ Intelligenz Quotient
JTAT Standardisierter Test der Joint Attention
PECS Picture Exchange Communication System
sign. Signifikant
TEEACH Treatment and Education of Autistic and Communication Handicapped
Children
TN Teilnehmer/Teilnehmerinnen
TD Normal entwickelte Kinder – typically developed children
RBIP Roboter Based Intervention Programm
WHO World Health Organisation
v
Schlüsselbegriffe
Autismus Spektrum Störung
Ergotherapie
Roboter
NAO
Socially assistive robotics
vi
Inhaltsverzeichnis
VORWORT ....................................................................................................... I
KURZFASSUNG ................................................................................................ II
ABSTRACT ..................................................................................................... III
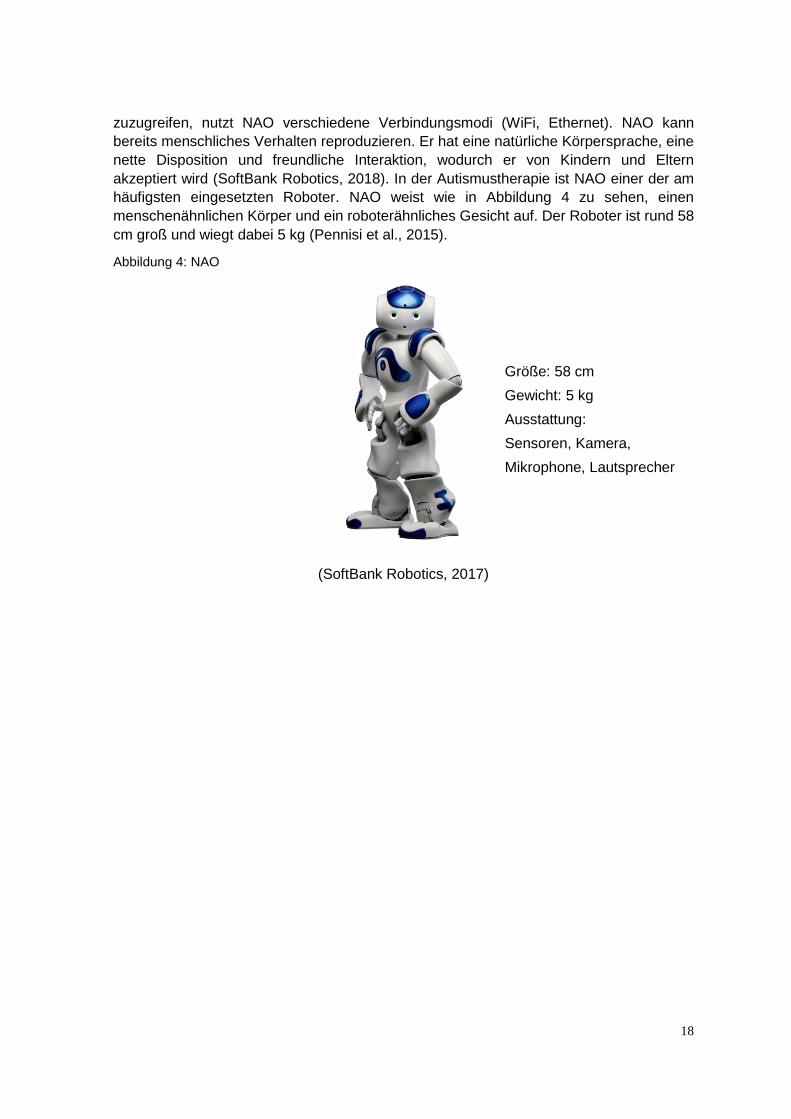
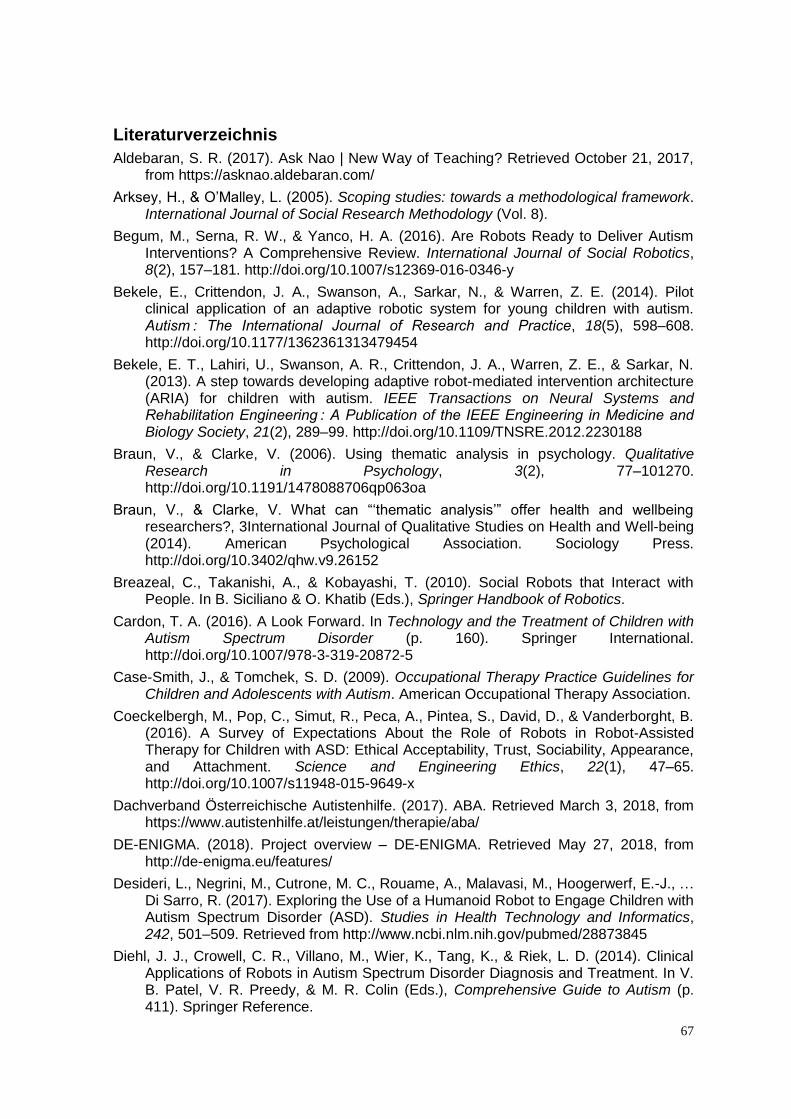
zuzugreifen, nutzt NAO verschiedene Verbindungsmodi (WiFi, Ethernet). NAO kann
bereits menschliches Verhalten reproduzieren. Er hat eine natürliche Körpersprache, eine
nette Disposition und freundliche Interaktion, wodurch er von Kindern und Eltern
akzeptiert wird (SoftBank Robotics, 2018). In der Autismustherapie ist NAO einer der am
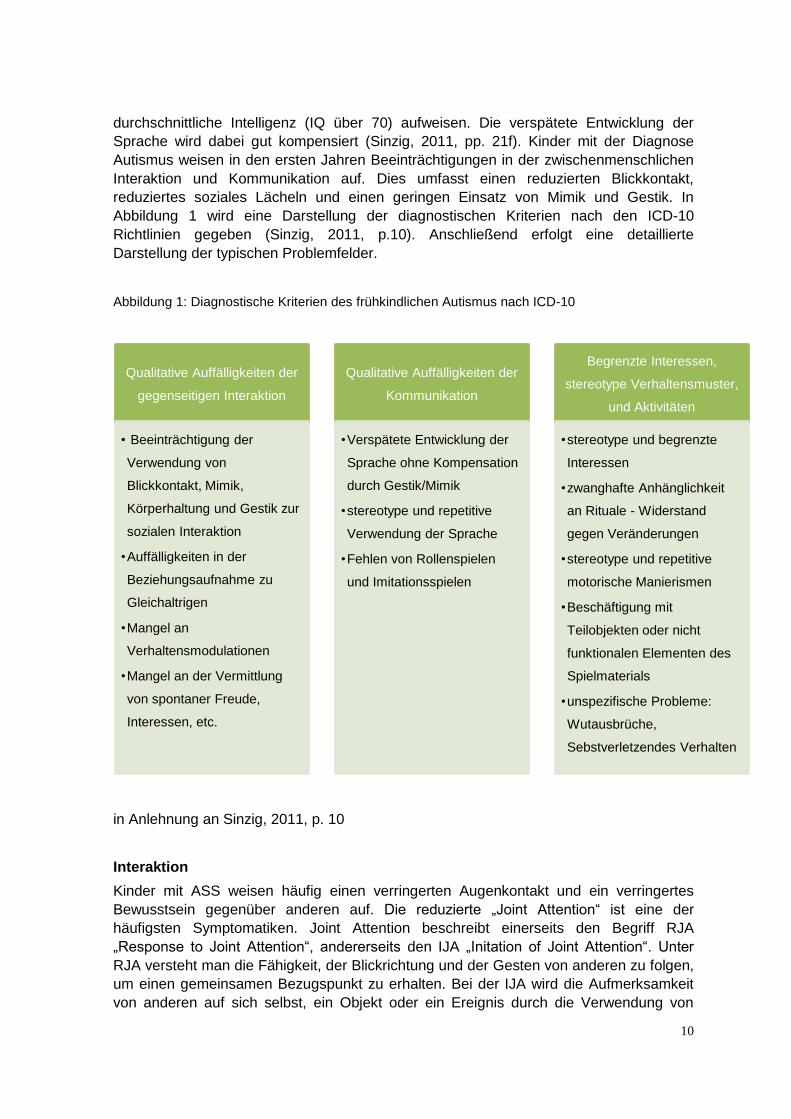
häufigsten eingesetzten Roboter. NAO weist wie in Abbildung 4 zu sehen, einen
menschenähnlichen Körper und ein roboterähnliches Gesicht auf. Der Roboter ist rund 58
cm groß und wiegt dabei 5 kg (Pennisi et al., 2015).
Abbildung 4: NAO
(SoftBank Robotics, 2017)
Größe: 58 cm
Gewicht: 5 kg
Ausstattung:
Sensoren, Kamera,
Mikrophone, Lautsprecher
19
1.5. Fragestellung und Ziel der Arbeit
Aus den oben genannten Gründen ist ein Einbezug von unterschiedlichen Professionen
wie Therapeutinnen und Therapeuten maßgeblich für den Einsatz von Robotern
entscheidend. Wie bereits erwähnt, werden Kinder mit Autismus häufig von
Ergotherapeutinnen und -therapeuten bei Aktivitäten des täglichen Lebens,
instrumentellen Aktivitäten, Schule, Freizeit und der sozialen Partizipation unterstützt.
Diese setzen dabei an der individuellen Person, deren Bedürfnissen und Fähigkeiten,
sowie an der Umwelt an (National Institute of Child Health and Human Developement,
2017). Sie bringen eine gute Voraussetzung für die Evaluierung von Robotern mit. Da es
noch keine expliziten Studien in Bezug auf eine ergotherapeutische Behandlung in
Verbindung mit den neuesten Forschungsergebnissen der Robotik im Autismusbereich
gibt, soll ein mögliches Konzept erstellt werden. Somit ergibt sich die Forschungsfrage:
Wie könnte der Einsatz von NAO in der ergotherapeutischen Behandlung von
Autismus gestaltet werden?
Bereits 2016 wurde eine Studie, über ethische Überlegungen zu Robotern in der
Therapie, bei unterschiedlichen Stakeholdern (Eltern, LehrerInnen, TherapeutInnen) aus
den Niederlanden, dem Vereinigtem Königreich, Rumänien, Belgien und der USA
durchgeführt. Diese Studie weist darauf hin, dass sich neuere Forschung speziell auf eine
Stakeholdergruppe beziehen sollte (Coeckelbergh et al., 2016). Eine weitere Studie über
die Einbindung von Kaspar in die Therapie umfasst ebenfalls mehrere
ExpertInnengruppen und wurde ausschließlich in den Niederlanden durchgeführt,
wodurch hierbei keine Generalisierung auf andere Länder erzielt werden konnte (Huijnen,
Lexis, Jansens, & de Witte, 2017). Aufgrund der Tatsache, dass die meisten Studien in
den Niederlanden und in England durchgeführt worden sind und es in diesen Ländern
spezielle Unterstützung und Schulen für Kinder mit ASS gibt (Huijnen et al., 2016), soll
eine Möglichkeit ermittelt werden, wie dies auch in Österreich umsetzbar wäre. Um NAO
in eine ergotherapeutische Behandlung implementieren zu können, ist es wichtig, den
aktuellen Stand der Forschung zu kennen und Faktoren wie Vor- und Nachteile, dessen
Effektivität und Einsetzbarkeit aufzuzeigen. Durch die Komplementierung der
vorhandenen Literatur und der Expertinnen- und Expertenmeinungen sollen folgende
Forschungsfragen durch diese Masterthese beantwortet werden.
Welche ethischen Überlegungen zum Datenschutz gibt es bezüglich einer
robotergestützten Therapie?
Welche Eigenschaften sollte NAO mitbringen, um einen Einsatz in der Ergotherapie
zu finden?
Welche Vor-/Nachteile hinsichtlich Architektur von NAO, der Kosten oder der
Usability werden in der Literatur und von Ergotherapeutinnen und –therapeuten
aufgezeigt?
Welche Evidenzen der Effektivität werden bereits in der Literatur beschrieben?
20
Das Ziel dieser Masterarbeit ist mit Hilfe der Literatur und einer qualitativen Erhebung ein
mögliches Konzept bzw. Grenzen von der robotergestützten Therapie darzulegen. Es
werden häufig, vor allem in neuen Technologien, Hoffnungen, aber auch Schwierigkeiten
gesehen. Unter einer professionellen, therapeutischen Sichtweise sollen diese Faktoren
ermittelt werden. Um eine geeignete Implementierung in die Praxis zu ermöglichen,
entwickelten Diehl et al. eine Art Leitlinie für Forschung und die klinische Praxis (2014).
Laut Diehl et al. (2014) müssen mehrere Aspekte für den Einsatz der Robotik beachtet
werden, wie die Charakteristiken von Robotern, die Therapeutin bzw. der Therapeut
selbst, der therapeutische Ansatz und das Individuum.
Die Aspekte, denen dabei besondere Aufmerksamkeit geschenkt werden soll, umfassen:
Das Interesse von Personen mit ASS gegenüber Robotern
Nicht alle Kinder mit ASD haben dieselben Präferenzen. Möglicherweise
bevorzugen Kinder mit guten kognitiven Leistungen menschenähnlichere Roboter.
Entscheidende Faktoren sind dabei der individueller IQ, das bestehende
Kommunikationslevel und die speziellen kognitiven Fähigkeiten
Die Eigenschaften des Roboters, die das Interesse wecken bzw. erhöhen
Diese Faktoren können beispielsweise der Klang der Stimme, die Motorik und das
Aussehen eines Roboters sein.
Die Rolle des Roboters
Es gibt verschiedenen Rollen welche ein Roboter einnehmen kann. Er kann
alleine mit dem Kind interagieren oder als eine Art Ko-TherapeutIn mitwirken.
Einerseits könnte der Roboter bei der Applied behavior therapy als
Feedbackvermittler oder Verstärker dienen. Andererseits kann er beim sozialen
Kompetenztraining eine komplexere Rolle übernehmen und als Unterstützer in der
sozialen Interaktion agieren.
Den klinischen Nutzen bestimmter technologischer Fortschritte in der
Autonomie
Der nächste zu beachtende Punkt ist die Bedienbarkeit des Roboters. Die aktuelle
technologische Entwicklung wird derzeit vom autonomen Handeln des Roboters
eingeschränkt. Es wird zurzeit eine zusätzliche Kontrolle von einem Therapeuten
bzw. einer Therapeutin benötigt um den Roboter effektiv einsetzten zu können.
Um die Interaktion aber ohne zusätzliche Kontrolle zu ermöglichen, beschäftigen
sich neue Ansätze mit dem Wizard of Oz Prinzip (Anm. machen und vlt
beschreiben)
Die Vorgehensweise in realen Umgebungen zu implementieren
Barrieren in der Entwicklung der Technik sind die hohen Kosten. Ein weiteres
Hindernis kann die Komplexität der NutzerInnen- Plattformen sein, wodurch sich
TherapeutInnen beängstigt fühlen könnten.
(Diehl et al., 2014)
21
2. Methodik
Die vorliegende Masterarbeit kombiniert zwei Forschungsansätze. Zuerst wird zur
Erhebung der aktuellen Literatur eine Literaturrecherche erstellt. Anschließend erfolgt zur
Generierung von neuem Wissen eine empirische Untersuchung mit Expertinnen und
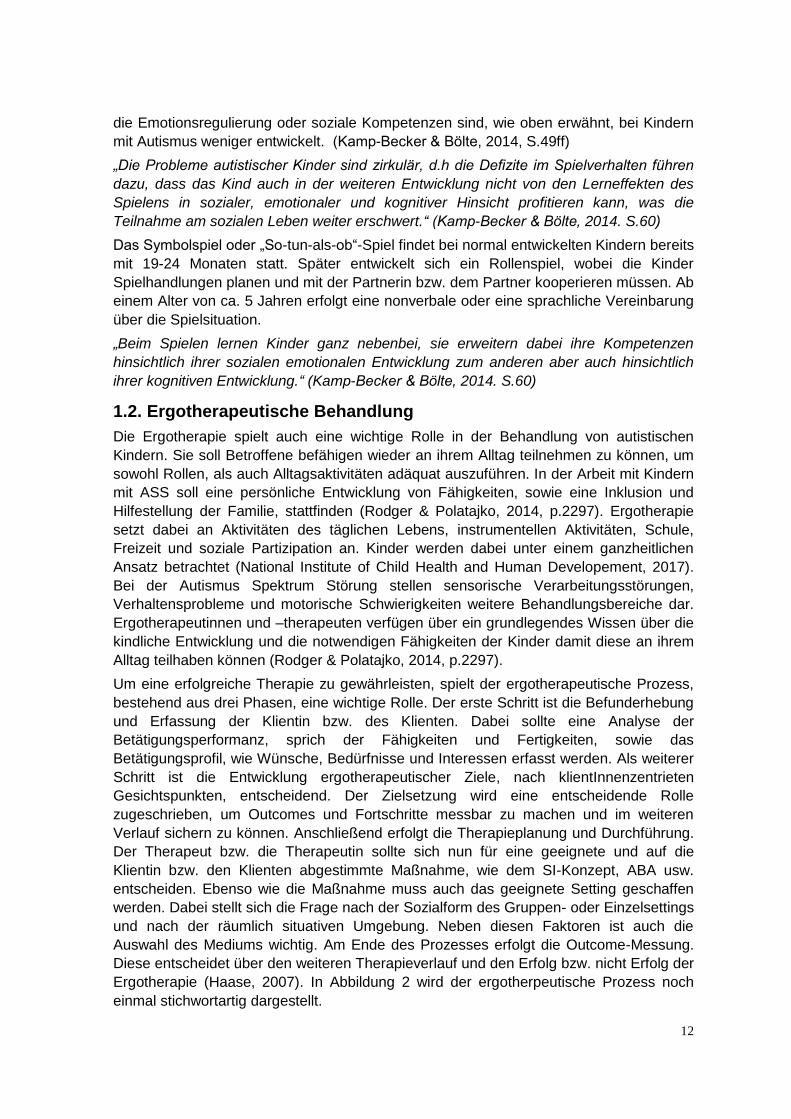
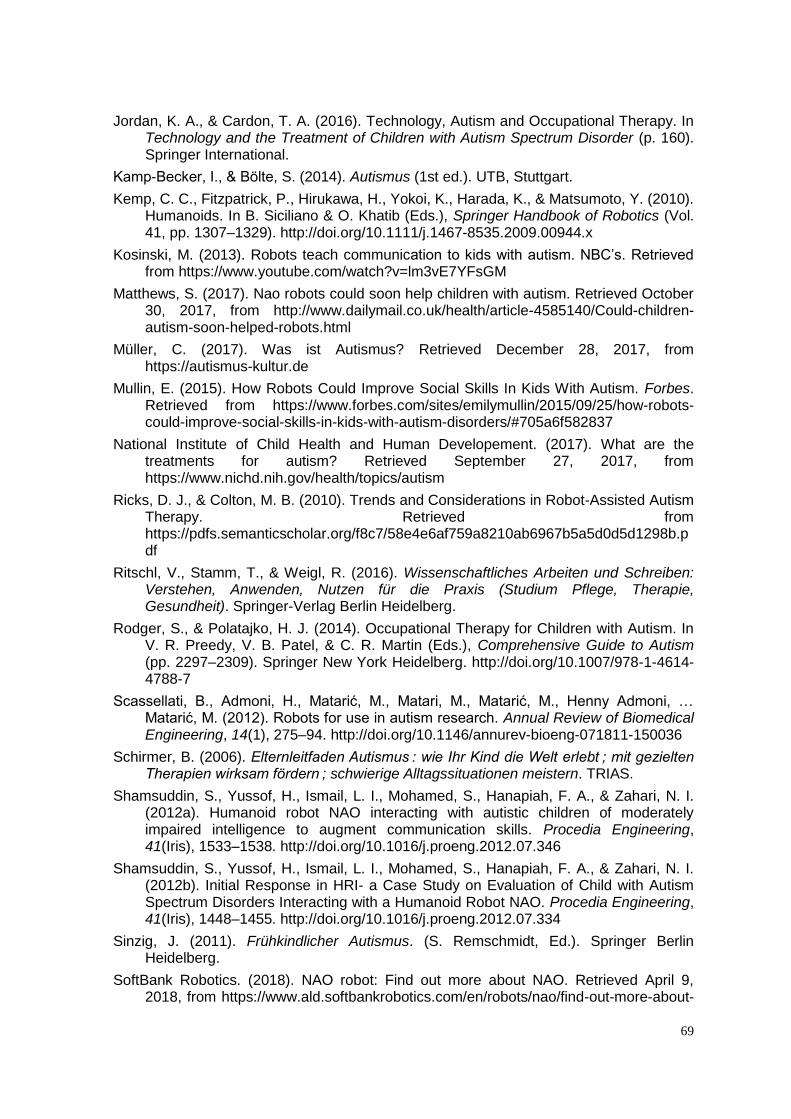
Experten der Ergotherapie. In Abbildung 5 wird der Prozess zur Erstellung dieser
Masterthesis dargelegt. Die Datenanalyse erfolgte nach der „Thematic Analysis“ (Braun &
Clarke, 2006).
eigene Darstellung (2018)
2.1. Scoping Review
Literaturreviews werden immer dann verfasst, wenn sich die Forscherin oder der
Forscher einen Überblick über die bisherige Literatur verschaffen will (Ritschl, Weigl, &
Stamm, 2016, S. 208).Damit dieses Wissen und eine Zusammenfassung über bereits
vorhandene Studien dargelegt werden kann, wird nach Arksey O’Malley (2005) ein
Scoping Review durchgeführt. Dieses Verfahren ist geeignet, um eine Breite an Daten
und Informationen zu sammeln. Es wird dabei keine Einschränkung bzgl. des Designs,
der Qualität oder anderen Kriterien getroffen. Auch wird kein Wert auf ein systematisches
Suchen gelegt und somit alle relevanten Artikel miteinbezogen (Arskey u. O’Malley,
2005). Durch diese spezielle Weise, Studien zu synthetisieren, kann sowohl
Nichtforschungsmaterial, wie persönliche Meinungen, sowie Forschungsmaterial
zusammengetragen werden. Da es bis zum jetzigen Zeitpunkt nur wenige Studien über
NAO und Autismus gibt, stellt der Einbezug der sogenannten grauen und
unveröffentlichten Literatur einen bedeutenden Faktor dar. Aufgrund der Tatsache, dass
sowohl Studien als auch Berichte in Zeitungen und Internet-Statements eine relevante
Datenquelle spielen, wurde das Scoping Review für die aktuelle Arbeit herangezogen. Es
ist jedoch zu bedenken, dass die fehlende Qualitätssicherung ein großer negativer
Aspekt ist (Daudt, van Mossel, & Scott, 2013).
Laut Arskey und O'Malley (2005) gibt es vier Hauptgründe für eine Scoping Studie:
Um das Ausmaß, den Umfang und die Art von Forschungstätigkeiten zu erfassen
Um die Sinnhaftigkeit eines systematischen Reviews bzw. einer Metaanalyse
herauszufinden
Scoping Review
Diskussionsrunde:
ExpertInnen ohne
Roboterkenntnissen
ExpertInneninterview:
ExpertIn mit
Roboterkenntnissen
Abbildung 5: Erstellungsweg der Masterarbeit
22
Um eine Zusammenfassung und eine Verbreitung von Ergebnissen zu
gewährleisten
Um Forschungslücken zu identifizieren
In der vorliegenden Arbeit ist das Ziel, aus bereits vorhandener Literatur, Rückschlüsse
auf den Forschungsstand, sprich auf die Gesamtheit von vorhandener Forschung, zu
ziehen.
In Tabelle 1 wird nachfolgend der Prozess zur Datenerfassung dargelegt. Die Erstellung
der Forschungsfrage wurde bereits in der Einleitung näher erläutert.
Tabelle 1: Scoping Review
in Anlehnung an Arksey O’Malley (2005)
2.1.1. Datensammlung
Die Datensammlung erfolgte im Zeitraum von Oktober bis November 2017, wobei
verschiedene Datenbanken verwendet wurden. Um dabei gezielt vorzugehen, wurde eine
Mesh-Term-Suche mit den Keywörtern „Autism spectrum disorder“, „Autistic disorder“
und „Robotics“ durchgeführt. Diese wurden aufgrund einer Vorrecherche als sinnvoll
erachtet. Es wurden die Datenbanken PubMed, CINHAL und Cochrane mit einbezogen.
Da dies am Ende nur eine limitierte Anzahl an Studien hervor brachte, erfolgte eine
erweiterte Suche mit den Begriffen: „Autism“ AND „robot“.
Da sich die Technik rapide weiterentwickelt und nur der aktuellste Stand der Forschung
miteinbezogen werden sollte, wurde die Recherche vorab auf die Jahre 2007-2017
eingeschränkt.
Erstellung der
Forschungsfrage
Welche therapeutisch relevanten Aspekte bzgl. Vor- und
Nachteile, ethischer Bedenken oder Effektivitätsnachweise
werden in bereits bestehender Literatur über NAO in der
Autismustherapie bei Kindern beschrieben?
Identifikation relevanter
Studien
Recherche in verschiedenen Datenquellen: elektronische
Datenbanken, Handrecherche in Journalen,
Internetplattformen
Studienselektion Auswahl der Studien nach Ein- und Ausschlusskriterien
Darstellung und Synthese Analyse und Zusammenfassung allgemeiner
Studienaspekte
Sortierung,
Zusammenfassung und
Berichterstattung
Zusammenfassung nach Themen
23
Datenbanken: Die elektronische Recherche erfolgte in den Datenbanken PubMed,
Cochrane und CINAHL.
Handrecherche: Aus der oben durchgeführten Recherche wurden die Referenzquellen
der gefundenen Studien und Reviews gescreent und ebenfalls weitere relevante Studien
inkludiert.
Zeitschriften: Aufgrund der Verknüpfung zu einem ergotherapeutischen Setting wurden
explizit die Fachzeitschriften der Ergotherapie durchforstet. Es wurden die Journale “The
American Journal of Occupational Therapy” (AJOT), “The Scandinavian Journal of
Occupational Therapy” (SJOT), “The ritish Journal of Occupational Therapy” ( JOT),
“The Australian Journal of Occupational Therapy” (AOJT) and “The Canadian Journal of
Occupational Therapy” (CJOT) miteinbezogen.
Forschungsprojekte: Da NAO bereits in 2 Projekten zur Behandlung von Autismus
eingesetzt wird, wurden auch Studien dieser Homepage-Seiten inkludiert.
Ein- und Ausschlusskriterien
Die Studien wurden subjektiv ausgewählt, daher ist eine Reproduktion der
Studienauswahl schwierig. Die Autorin möchte mit diesem Scoping Review relevante
Fragen hinsichtlich ethischer Komponenten, Vor- und Nachteile und den aktuellen
Entwicklungsstand bereits vorhandener Konzepte darlegen. Es sollten keine einzelnen
Segmente der technischen Systemerstellung herausgehoben werden. Somit werden
Studien, die rein technische Entwicklungsschritte, beinhalten ausgeschlossen.
Um die Informationen einzuschränken, wurden nur Studien mit dem Roboter NAO welche
im Jahr 2007-2017 durchgeführt wurden, inkludiert. Außerdem sollten die Studien
ausschließlich mit Kindern mit der Diagnose Autismus oder Asperger Syndrom
durchgeführt werden. Studien, welche sich auf Erwachsene oder Jugendliche beziehen,
wurden ausgeschlossen. Aus Studien, welche von einem Forscherteam des Öfteren
durchgeführt worden sind, wurden nur neue Erkenntnisse hervorgehoben und nur die
aktuellste Version verwendet.
Es werden Reviews ausgeschlossen, welche keine konkreten Aussagen über NAO
treffen und allgemein über Roboter berichten. Da nur ein Überblick über die Anwendung
von NAO, die Effektivität und therapeutisch wichtige Aspekte gegeben werden sollte,
wurden Studien ohne therapeutisch relevanten Bezug ausgeschlossen. Das heißt
Studien, welche sich mit der Architektur, mit der geeigneten Studiendurchführung oder
mit einzelnen technischen Aspekten ohne AnwenderInnenbezug beschäftigten, wurden
nicht inkludiert.
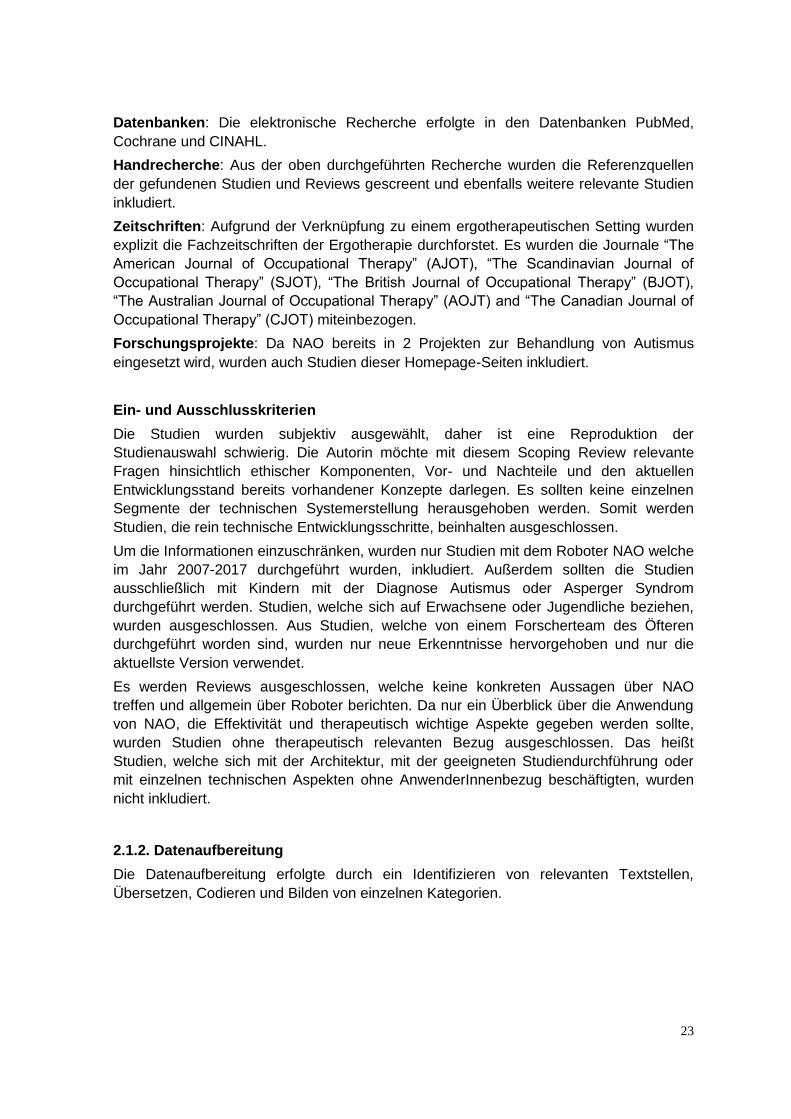
2.1.2. Datenaufbereitung
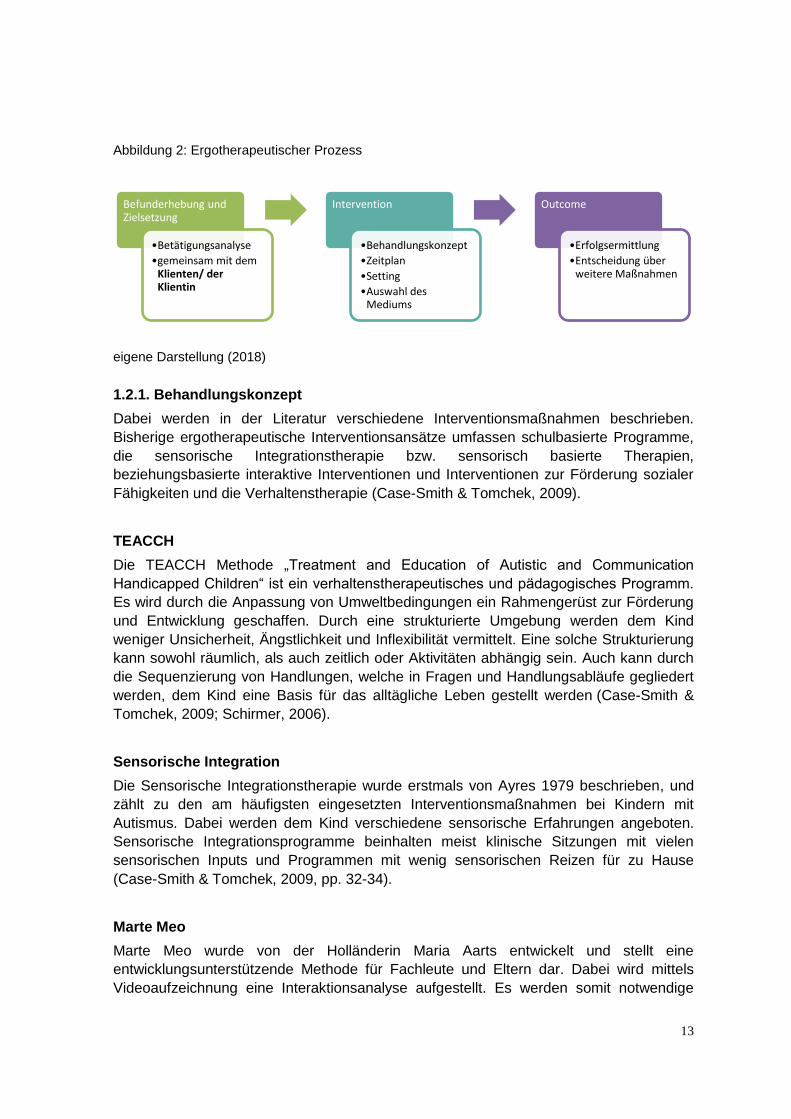
Die Datenaufbereitung erfolgte durch ein Identifizieren von relevanten Textstellen,
Übersetzen, Codieren und Bilden von einzelnen Kategorien.
24
Abbildung 6: Datenaufbereitung
eigene Darstellung (2018)
Original Übersetzung Code Oberkategorie Thema
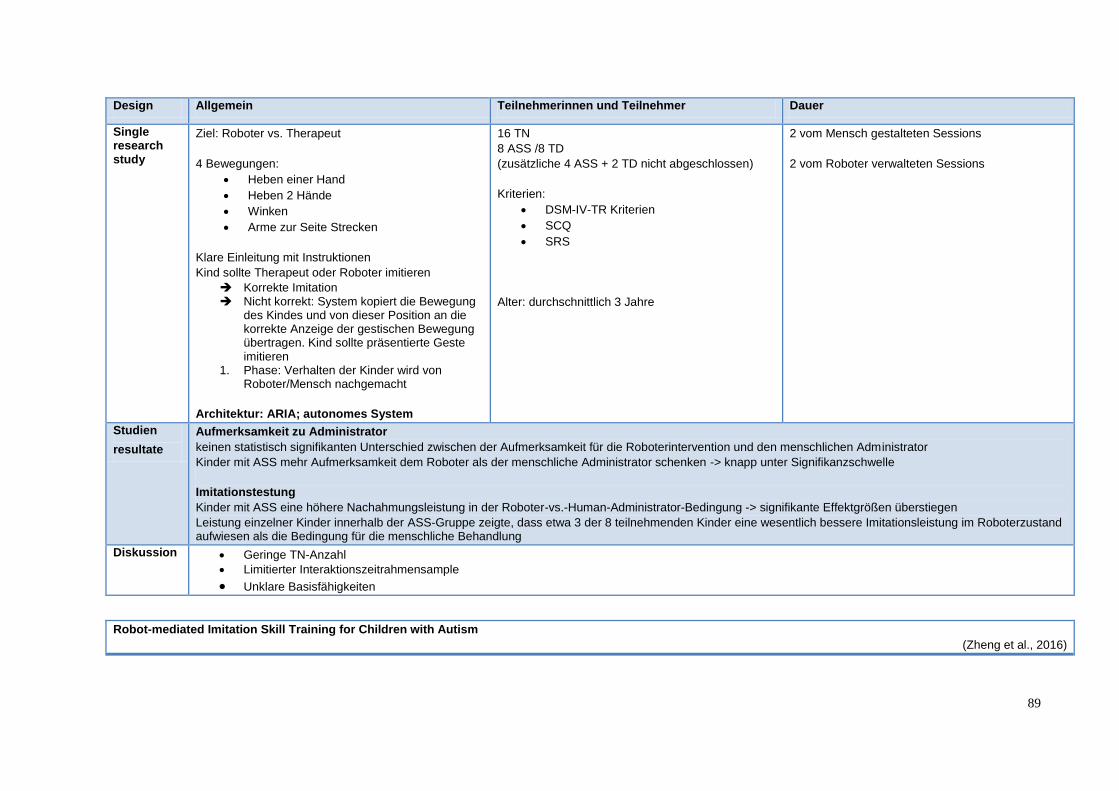
"Children with ASD paid more attention to the robot than the
human administrator ."
(Zheng et al., 2016)
"Kinder mit ASD
widmeten mehr Zeit
dem Roboter als dem
menschlichen Vermittler."
(Zheng et al., 2016)
Schenken mehr Zeit
dem Roboter gegenüber
Mensch
mehr Interesse
Motivation und Aufmerksamkeit
25
2.2. Qualitative Forschung – Diskussionsrunden und
Expertinneninterview
Qualitative Forschung kann differenzierte Einblicke in Erfahrungen und Perspektiven von
KlientInnen und medizinischem Fachpersonal liefern. Dieses erhaltene Wissen kann
völlig neu und unbekannt sein. Es kann, ergänzend zum Wissen aus quantitativen
Methoden, neue Blickwinkel generieren (Braun & Clarke, 2014). In Gesundheitsberufen
ist daher die qualitative Forschung besonders geeignet, da somit Daten speziell aus der
subjektiven Sicht der Betroffenen erhoben werden können (Ritschl, Stamm, & Weigl,
2016, p. 69). Um dabei die Forschungsfrage bezüglich der Akzeptanz, Perspektiven,
Praxis, Problematiken und der Implementierbarkeit zu erheben, wurden
Diskussionsrunden, aus der Sicht von österreichischen ErgotherapeutInnen,
durchgeführt. Ziel ist es dabei eine Vielzahl an Informationen von den potentiellen
EndnutzerInnen zu erhalten (Ritschl et al., 2016, p. 119). Auch wurde, um in die Tiefe der
Thematik einzutauchen, ein Expertinneninterview mit einer Ergotherapeutin, welche sich
schon intensiv mit dem Thema Robotik und Autismus auseinandergesetzt hat,
durchgeführt.
2.2.1. Stichprobenauswahl
Zur Rekrutierung der Teilnehmerinnen und Teilnehmer wurde nach der
Gelegenheitsstichprobe und dem Schneeballverfahren vorgegangen. Die
Gelegenheitsstichprobe wurde aus organisatorischen Gründen als geeignet empfunden,
da somit schnell Personen rekrutiert werden konnten (Ritschl et al., 2016). Die
Kontaktaufnahme erfolgte mittels Mailverkehr und Telefongesprächen. Es wurden
ergotherapeutische Therapiezentren im Bereich der Pädiatrie in Wien und in
Niederösterreich kontaktiert. Die Suche für geeignete Therapiezentren erfolgte einerseits
über die „Ergotherapie Austria“ Seite (Ergotherapie Austria – Bundesverband der
Ergotherapeutinnen und Ergotherapeuten Österreichs, 2017) und über die Internetseite
„Handicapkids“ (Handicapkids, 2018), andererseits wurde eine Google Suche mit den
Wörtern „Ergotherapie“ „Autismus“ und „Wien“ durchgeführt. Es wurden dabei nur
Therapiezentren angeschrieben, welche explizit als Leistung „Autismus Spektrum
Störungen-Therapie“ verzeichnen. Des Weiteren wurde versucht über eine Facebook-
Anzeige weitere TherapeutInnen zu rekrutieren. Die Suche in Niederösterreich
beschränkte sich auf Therapiezentren rund um Wien. In Form einer schriftlichen
Teilnahmeerklärung wurden die potentiellen InterviewpartnerInnen über das Ziel der
Untersuchung, die Art und Weise der Mitwirkung und über Konsequenzen infomiert. Dies
hat aufgrund von forschungsethischen Gesichtspunkten eine große Wichtigkeit (Gläser &
Laudel, 2010). Um weitere TherapeutInnen zu erreichen, wurde ebenfalls das
Schneeballverfahren angewandt. Es wurden dabei TherapeutInnen rekrutiert, die der
Forscherin bereits bekannt waren. Nach dem Verfahren wurden diese wiederrum
gebeten, die Informationen an potentielle TeilnehmerInnen weiterzuleiten. Somit konnten
weitere ExpertInnen erreicht werden.
Die Stichprobe setzt sich aus Ergotherapeutinnen und –therapeuten aus pädiatrischen
Therapiezentren aus Wien und Niederösterreich zusammen. Die Expertinnen und
Experten wurden anhand ihrer Berufserfahrung im autistischen Setting gewählt. Weitere
Einschlusskriterien waren:
26
- TherapeutInnen, die im letzten halben Jahr mit Autisten arbeiteten
- TherapeutInnen, mit mindestens einem halben Jahr Berufserfahrung
- TherapeutInnen, mit einer anerkannten Ausbildung in Österreich
- TherapeutInnen, die der deutschen und englischen Sprache mächtig waren
- TherapeutInnen aus Österreich, Deutschland oder der Schweiz
2.2.2. Diskussionsrunden
Zur Planung und Durchführung der Diskussionsrunden wurde ein Leitfaden nach den
Richtlinien von Diehl et al. (Diehl et al., 2014), in Anlehnung an einer bereits
durchgeführten Studie von Huijnen et al. über Kaspar (2017) und mit dem
Hintergrundwissen des Scoping Review, erstellt. Die Kategorienbildung wird nochmals in
Kapitel 3.5 dargestellt. Der Leitfaden wurde durch gewonnene Diskussionspunkte in den
weiteren Gesprächsrunden angepasst. Auch wurde den TherapeutInnen zum besseren
Analysieren und Notieren von relevanten Aspekten ein Notizbuch ausgehändigt. Dieses
wurde mit Fragen zu dem Inhalt der Videosequenzen versehen und sollte es
ermöglichen, Stichwörter während oder nach den Videos notieren zu können. Auch
beinhaltete dieses allgemeine Fragen über die TeilnehmerInnen, beispielsweise über die
Berufserfahrung, den derzeitigen Einsatz von Technik oder den Grad des akademischen
Abschlusse.
Organisation Diskussionsrunden
Die Organisation, sowie die Durchführung der Diskussionsrunden werden nachfolgend
dargestellt. Nach der Rekrutierung der TeilnehmerInnen wurden Termine mit den
GesprächspartnerInnen fixiert. Dabei wurden der Interviewtermin und der Ort so gewählt,
dass für die Befragten wenig Aufwand bestand. Es wurde der Arbeitsplatz der
teilnehmenden Personen als geeignetes Setting empfunden, da dadurch eine bessere
Verknüpfung zur eigenen Arbeitspraxis geschaffen werden konnte.
Die Diskussionsrunden wurden mittels Smartphone aufgezeichnet, da die
Tonaufzeichnung einen nicht mehr wegzudenkenden und unabkömmlichen Faktor bei
der Datenerhebung darstellt. Ohne diese könnten wichtige Informationen verloren gehen
(Gläser & Laudel, 2010, S.158). Auch wurden mittels handschriftlichen Notizen durch
eine externe Assistentin, wichtige Anhaltspunkte mitgeschrieben. Der Workshop stellte
mit 60-90 Minuten einen guten Zeitrahmen dar, da die Expertinnen und Experten somit
noch Motivation hatten und bis zum Schluss die Aufmerksamkeitsspanne halten konnten.
Um den Kriterien der Forschungsethik und dem Datenschutz gerecht zu werden, wurde
ein Informed Consent ausgehändigt. Die Anonymisierung erfolgte durch eine einmalige
Identifikationsnummer, welche jedem Teilnehmer und jeder Teilnehmerin zugewiesen
wurde. Laut Gläser und Laudel spielen ethische Kriterien in der sozialwissenschaftlichen
Forschung eine unabkömmliche Rolle. Sowohl Fachleute als auch die durchschnittliche
Bevölkerung haben den Anspruch nach ethischen Richtlinien behandelt zu werden.
Allerdings weist dies bei Fachprofessionen nur wenig ethische Probleme auf (Gläser &
Laudel, 2010, p. 56). Auch ist bei einer Expertinnen- bzw. Expertenbefragung kein
Ethikantrag notwendig (Ritschl et al., 2016, p.41).
27
Durchführung der Diskussionsrunde
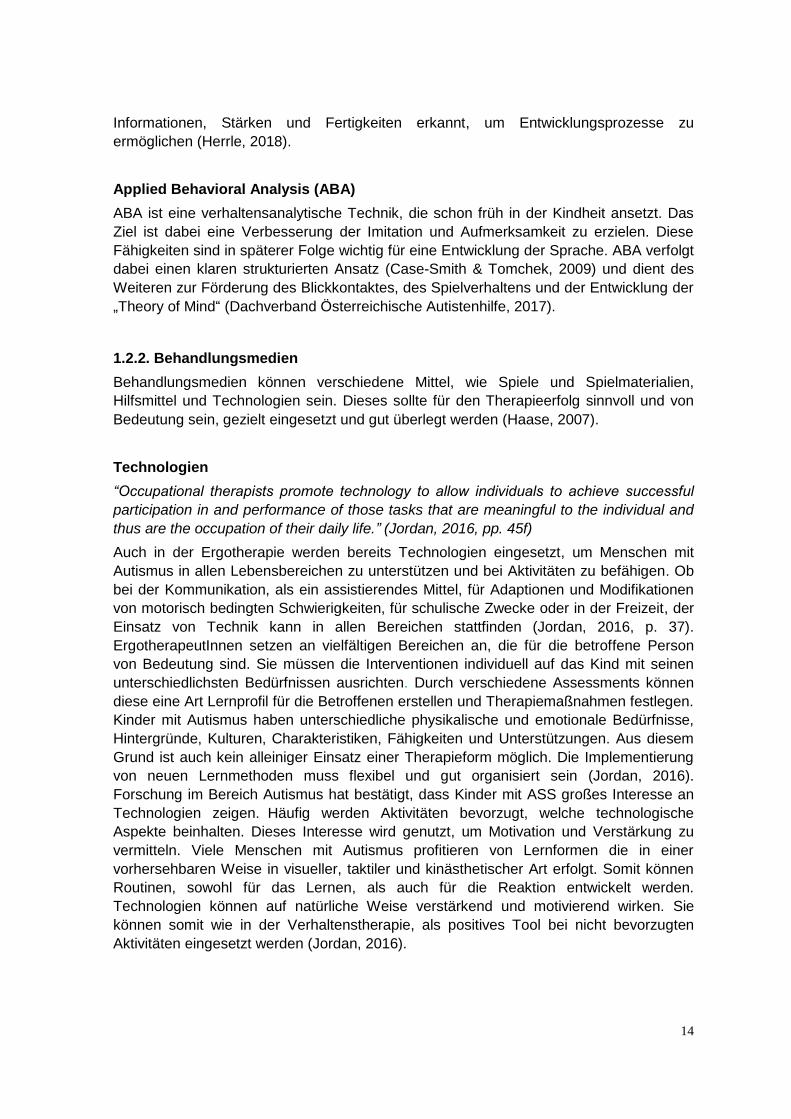
Die Diskussionsrunden wurden in drei Bereiche gegliedert.
Im ersten Teil wurde der Roboter NAO mittels einer PowerPoint Präsentation und einer
kurzen Sequenz von 0:18 – 1:42 Minute eines AnwenderInnenvideos des Projektes
PhysicAAL vorgestellt (Stadtfernsehen Schwechat, 2013). In der PowerPoint
Präsentation (siehe Anhang) wurde der Begriff SAR erklärt, die am häufigsten
eingesetzten Roboter gezeigt und auf NAO näher eingegangen.
Im zweiten Teil wurden drei unterschiedliche Videoausschnitte in Verbindung mit
Autismus dargestellt, welche differenzierte Settings beinhalteten. Dies soll der
Teilnehmerin bzw. dem Teilnehmer ein Gefühl für den Einsatz der Robotik vermitteln.
Somit kann ein erstes Verständnis und eine Vorstellung geschaffen werden.
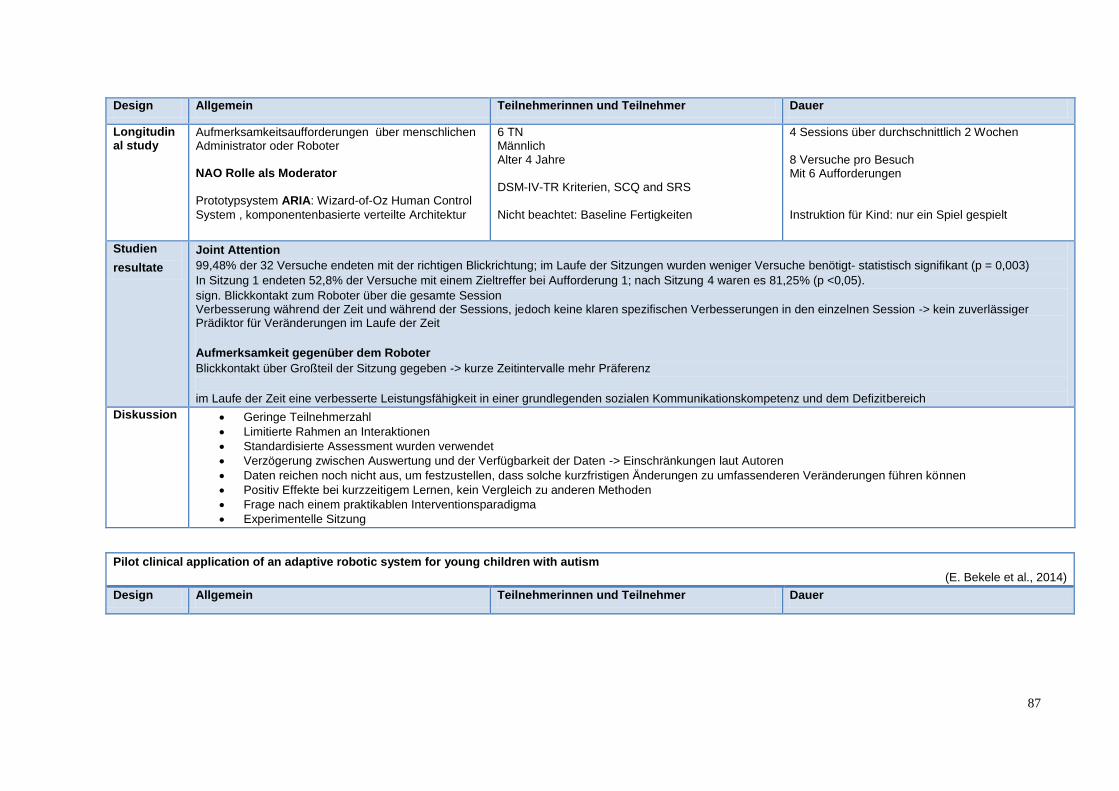
Video 1 zeigt eine Interventions-Experimenten Studie. Dabei wird eine Interaktion
zwischen NAO und einem drei Jahre alten Buben gezeigt. Ziel dieses Experimentes ist es
Verbesserungen im ereich der „Joint Attention“ zu erzielen. Das Video beruht auf der
Studie „A step towards developing adaptive robot-mediated intervention architecture
(ARIA) for children with autism” der AutorInnen Bekele et al. (2013). Dabei wurden auf
Monitoren Bilder und Videos gezeigt. Mit Videoaufzeichnungen durch mehrere Kameras
im Raum und eine Kappe, welche der Junge tragen musste, wurde die Aufmerksamkeit
des Kindes gemessen (Vanderbilt University, 2013).
In Video 2 wird NAO in einem Gruppensetting von drei Kindern an einer britischen Schule
gezeigt. Das Ziel war es Kinder beim Fokussieren, beim Imitieren und Benennen von
Gefühlen zu helfen. Die Kinder interagierten dabei mit NAO. Es wurde die Sequenz von
1:03 bis ca. 3:00 Minuten gezeigt (Kosinski, 2013).
Video 3 beschreibt wiederrum ein Einzelsetting. In diesem Kinder-TherapeutInnen-
Roboter-Szenario diente NAO als Ko-therapeut. Hierbei musste das Kind verschiedene
Aufgaben lösen und wurde bei richtigem Verhalten gelobt. Es wurden dabei die
Sequenzen 0:30 bis 0:56 Minuten und die Sequenz 1:34 - 2:12 Minute gezeigt
(Westminster Technologies, 2015).
Danach erfolgte die Befragung der TherapeutInnen, wobei wie oben beschrieben ein
semistrukturierter Leitfaden zur Strukturierung der Diskussion verwendet wurde. Dieser
wurde für jede Diskussionsrunde angepasst, um neue Informationen mit einfließen zu
lassen. Es wurden von der ersten durchgeführten Diskussion wichtige Aspekte der
einzelnen Fragen notiert und in den weiteren Diskussionsrunden angesprochen.
In der letzten Phase wurde noch einmal auf spezielle Fragen und Interessen der TN
eingegangen.
28
Abbildung 7: Diskussionsdurchführung
eigene Darstellung (2018)
2.2.3. Expertinneninterview
Um die Beantwortung dieser Masterarbeit besser untermauern zu können, wurde mit
Hilfe des Expertinneninterviews weitere Erkenntnisse generiert. Es sollte zum Wissen der
Diskussionsrunden gezieltere und explizitere Ergebnisse liefern. Um dabei strukturiert
vorzugehen, wurde das leitfadengestützte Interview gewählt. Der Leitfaden wurde aus
den Ergebnissen des Scoping Reviews sowie der Diskussionsrunden entwickelt. Laut
Gläser und Laudel (2010) gibt es unterschiedliche Merkmale um Interviews zu
klassifizieren. Der Grad der Standardisierung ist das wichtigste Merkmal von Interviews.
Man unterscheidet zwischen vollstandardisierte Interview, das halbstandardisierte
Interview und das nicht standardisierte Interview (Gläser & Laudel, 2010, S.40-41). Der
Leitfaden soll als Grundgerüst für das Interview dienen und ein Abschweifen über den
Inhalt der Thematik verhindern. Es ist dabei keine verbindliche Reihenfolge einzuhalten
und soll den normalen Gesprächsverlauf nicht beeinträchtigen. Laut Gläser und Laudel ist
bei Expertinneninterviews ein Leitfaden ein unverzichtbares Tool (2010, S.187),
Durchführung Expertinneninterview
Das Expertinneninterview hätte mit einem Mitarbeiter des DREAM Projektes stattfinden
sollen. Eine Anfrage wurde dafür mittels E-Mail versandt. Wegen fehlender Rückmeldung
wurde jedoch eine Adaptierung vorgenommen und es wurde ein Expertinneninterview mit
einer Ergotherapeutin mit Kenntnissen über Robotik durchgeführt. Die Expertin konnte
durch die Facebook-Anzeige rekrutiert werden. Das Interview wurde mit einer Zeitspanne
von 30 - 60 Minuten angesetzt und erfolgte in einem von der Expertin gewählten
Kaffeehaus. Ebenso wie die Diskussionsrunden wurde auch das Expertinneninterview
mittels Smartphone aufgezeichnet.
2.2.4. Thematic Analysis
Die Datenanalyse wurde in Anlehnung an die thematische Analyse nach Braun und
Clarke (2006) durchgeführt. Die thematische Analyse eignet sich besonders gut, da bei
dieser Datenanalysemethode sehr viel Flexibilität vorherrscht. Da die vorliegende Studie
und die damit verbundene angedachte Konzepterstellung neuartig sind, stellt diese
Theorieungebundenheit einen geeigneten Ansatz dar.
Einführung:
•Vorstellung der Studie
•Vorstellung NAO
• inkl. Video
Hauptteil:
•3 Videos (verschiedene Settings)
•Befragung der ErgotherapeutInnen
Schlussteil:
•Klärung bei offenen Fragen
29
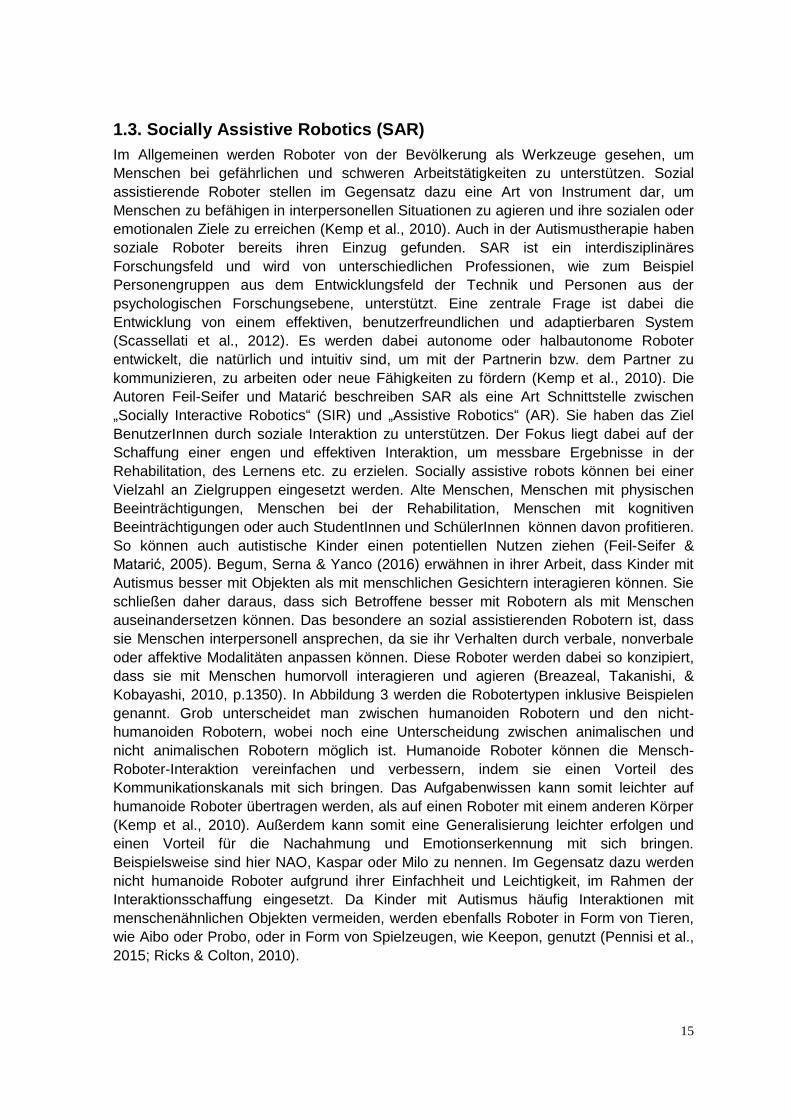
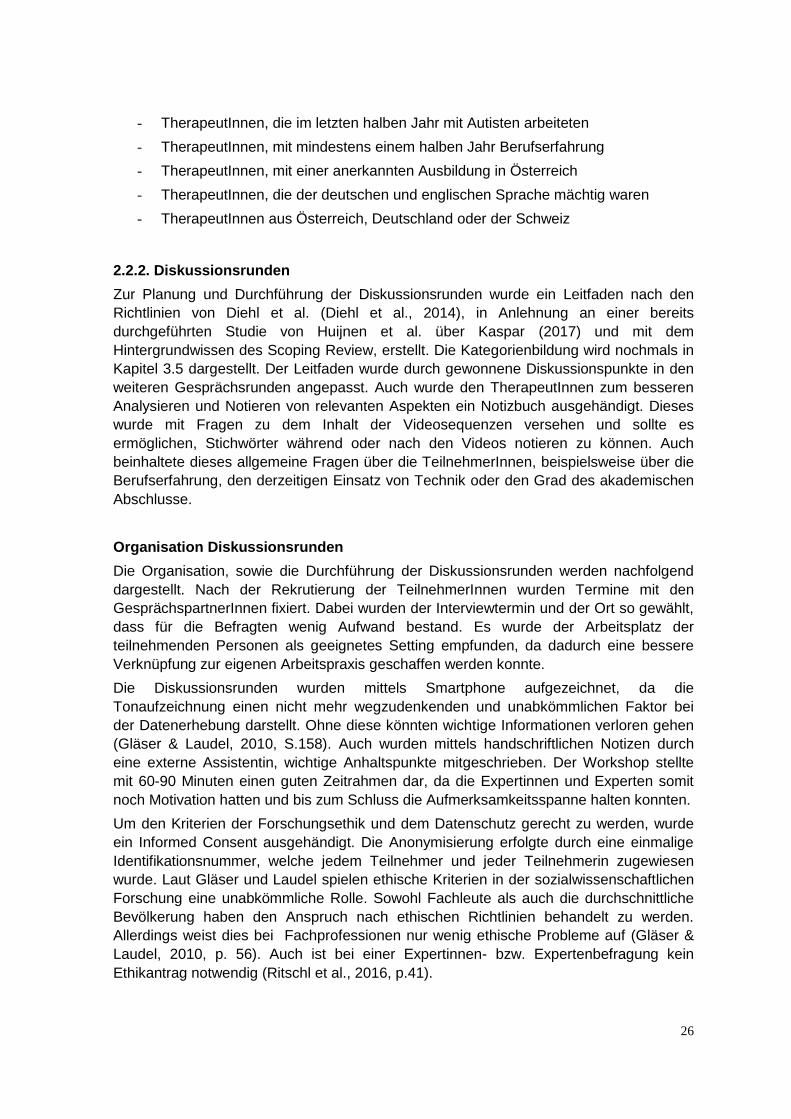
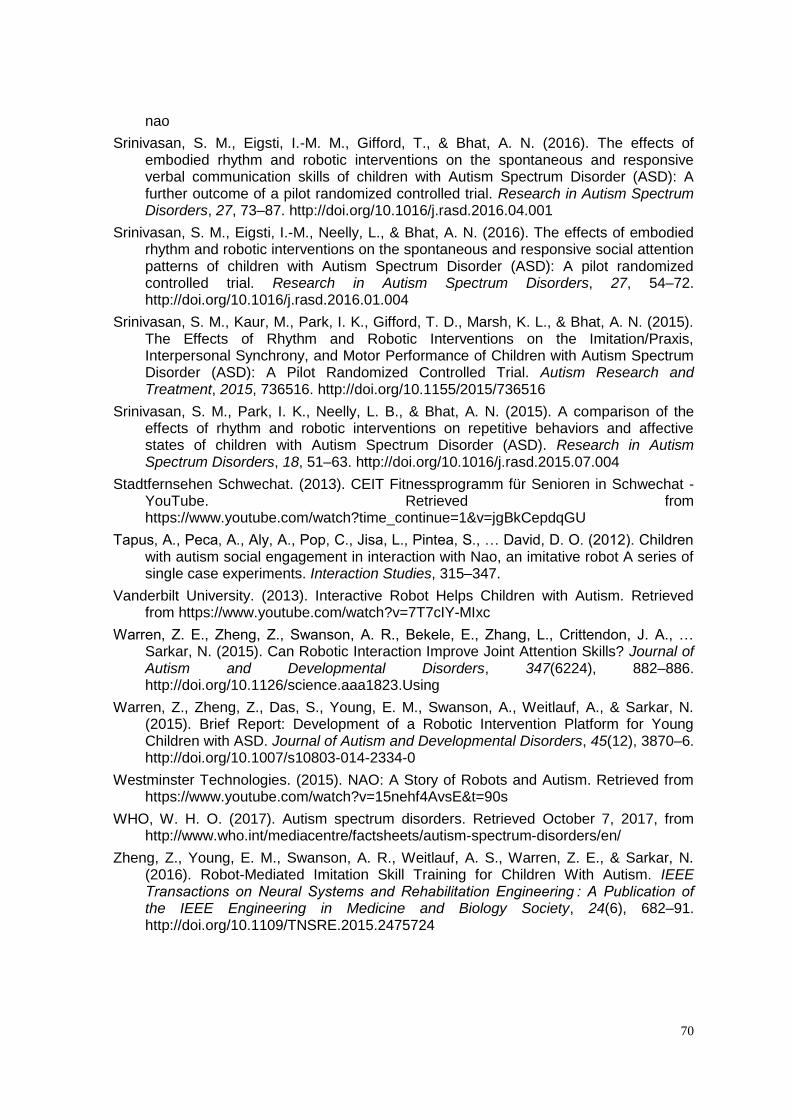
Braun und Clarke entwickelten einen 6-Phasen Analyseprozess zur Datenerhebung
(2006).
Abbildung 8: Analyseprozess
eigene Darstellung (2018)
Phase 1: Mit den Daten vertraut machen
In dieser Phase ist es wichtig sich mit dem Inhalt der Thematik vertraut zu machen und in
die Tiefe und Breite einzutauchen. Ein wiederholtes Lesen der Daten ist bedeutend bevor
mit dem Codieren begonnen werden kann. Durch diese intensive Auseinandersetzung
mit dem Datensatz werden erste Ideen und Muster entwickelt. Da nicht nur Studien,
sondern auch Interviewtranskripte analysiert wurden, müssen diese nach Braun und
Clarke zuerst transkribiert werden. Es wird dabei ein hoher Anspruch auf eine wörtliche
Darstellung aller verbalen und nonverbalen Aussagen gelegt (Braun und Clarke, 2006).
Um eine sinngemäße Erfassung der Aussagen zu gewährleisten, erfolgte eine
Übersetzung von umgangssprachlichen Rohdaten in eine hochdeutsche Sprache, sowie
eine Entfernung von Wortwiederholungen und Füllwörter. Das Fehlen von Wörtern wurde
durch eine Kennzeichnung mit (…) und unverständliche Wörter mit dem
Anfangsbuchstaben und einem Unterstrich dargestellt.
Kennzeichnung der sprachlichen Textpassagen
[…] Pausen, Füllwörter etc.
(…) Textstelle aus einem Absatz
S_ Unverständliche Wörter
Bei der Transkription wurden die einleitenden Worte, wie der Zweck der Studie etc. nicht
niedergeschrieben, es erfolgte nur eine Transkription des tatsächlichen Interviews.
Phase 2: Erzeugen von Anfangscodes
In dieser Phase spielt die Erstellung von ersten Codierungen eine zentrale Rolle. Aus den
Daten werden sinnvolle Elemente und Segmente identifiziert. Die Codierung ist abhängig
von der Daten- oder Theoriegebundenheit (Braun und Clarke, 2006). Ein manuelles
Phase 1: Vertraut machen mit den Daten
Phase 2: Generierung von Codes
Phase 3: Suchen nach Themen
Phase 4: Themenüberprüfung
Phase 5: Definieren und Benenen von Themen
Phase 6: Reproduktion
30
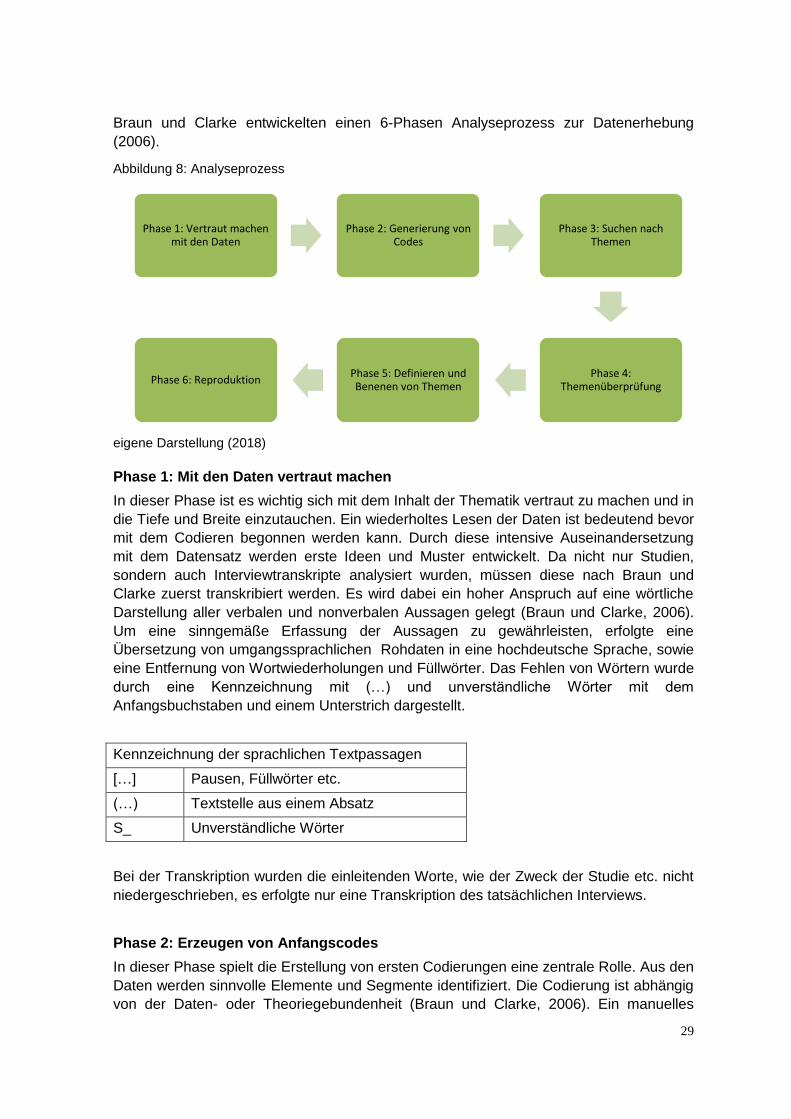
Codieren, welches in der vorliegenden Masterarbeit verwendet wurde, wurde mittels
Textmarker und Post it‘s durchgeführt. Es wurden färbig zusammenhängende Satzteile,
Wörter oder Phrasen verwendet und mit Codes unterlegt. Dies wurde mittels der
induktiven Analyse durchgeführt. Um ein besseres Verständnis des verwendeten
Codierungsprozesses zu vermitteln, wird in Abbildung 9 dieser Schritt mittels Foto
dargestellt.
Abbildung 9: Codierung der Daten
eigene Darstellung (2018)
Phase 3: Suchen nach Themen
Diese Phase beschäftigt sich mit der Themenfindung basierend auf den erstellten Codes.
Die Codes werden analysiert und zu einem übergeordneten Thema kombiniert (Braun
und Clarke, 2006). Mit einer Tabelle wurden alle Codes einem bestimmten Thema
zugeordnet. Es wurden somit Hierarchien in Form von Oberkategorien und Themen
gebildet.
Phase 4: Überprüfen der Themen
In diesem Schritt wird eine Verfeinerung der Themenklassifizierung vorgenommen. Es
wird noch einmal auf die Rohdaten zurückgegriffen und eine Überprüfung dieser
vorgenommen. Am Ende dieser Phase sollten alle Textdaten einer bestimmten
Oberkategorie untergeordnet sein (Braun und Clarke, 2006).
Phase 5: Definieren und Bennen von Themen
Die erstellten Themen sollten nicht zu komplex sein. Hier ist es wichtig, jedes Thema in
ein paar relevanten Sätzen zusammenfassen zu können. Die Namensgebung des
31
Themas sollte dabei prägnant, schlagkräftig und themenvermittelnd sein (Braun und
Clarke, 2006).
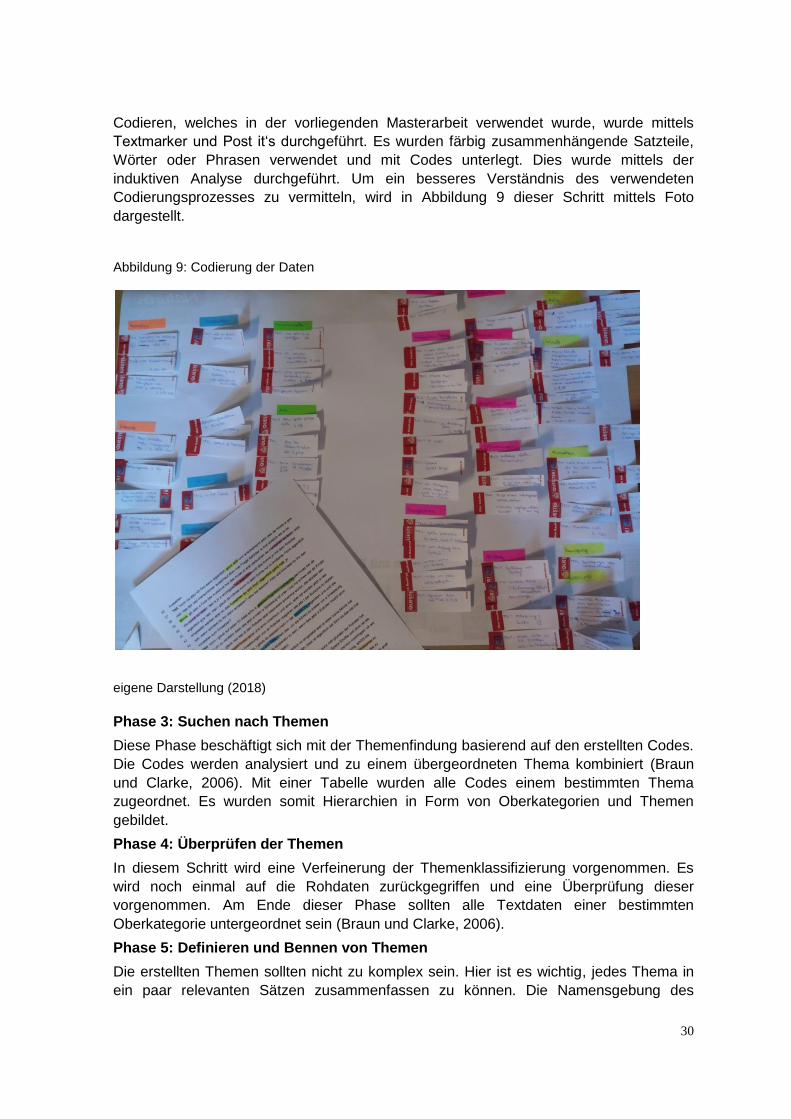
Phase 6: Reproduktion
In der Datenaufbereitung und –darstellung ist es laut Braun und Clarke wichtig genug
Datenextrakte aufzuzeigen. Es sollten dabei anschauliche und themenersichtliche
Beispiele gewählt werden und in Bezug zur Forschung stehen (Braun und Clarke, 2006).
Zur Repräsentation wurden dabei aus jeder Diskussionsrunde ein bis zwei wortgetreue
Aussagen ausgesucht und zitiert. Es wurden Zitate für den besseren Lesefluss in
hochdeutscher und grammatikalisch korrekter Sprache übernommen. Vor allem Zitate der
TN5 wurden übersetzt eingearbeitet.
Abbildung 10: Datenaufbereitung
eigene Darstellung (2018)
Original Übersetzung Code Ober
-kategorie Thema
TN 5: „(..)jo oiso i denk scho oiso i glaub für meine
Kinder passts grod ned so guat
weil da onfoch nu goa ka
Sprache do ist zum Beispiel oiso. ja hm. i
glaub des is nu a bissl zu früh
vielleicht für de Kinder de i grod hob oba i denk ma so wie de
Kinder im Video woan wenn die
allgemein verbal folgen kinnan.
(...)"
TN5: "(...) ich denke
schon, also für meine
Kinder passt es
gerade gar nicht, weil sie noch
keine Sprache
haben. [...] ich glaube,
dass ist noch ein bisschen
zu früh für die Kinder
die ich gerade
habe, aber ich denke
nicht geeignet für Kinder mit fehlender
Sprachent-wicklung
Sprache Einsatzgruppe
32
3. Ergebnisse des Scoping Reviews
Insgesamt wurden 318 Studien in den Datenbanken und per Handrecherche gefunden.
Nach einer ersten Abstraktionsanalyse wurden die Artikel im Volltext gelesen und nach
den Ein- und Ausschlusskriterien selektiert. Da einige Studien sowohl als Manuskripte bei
einer Konferenz (IEEE International Conference on Robotics and Automation)
veröffentlicht und zusätzlich in einem Journal publiziert wurden, wurde aus den
Manuskripten nur relevante Diskussionsaspekte oder Ergebnisaspekte miteinbezogen.
Sollten Studien von denselben AutorInnen des Öfteren veröffentlicht worden sein, wurde
nur die aktuellste Version inkludiert. Letztendlich wurden 14 Studien für das Review
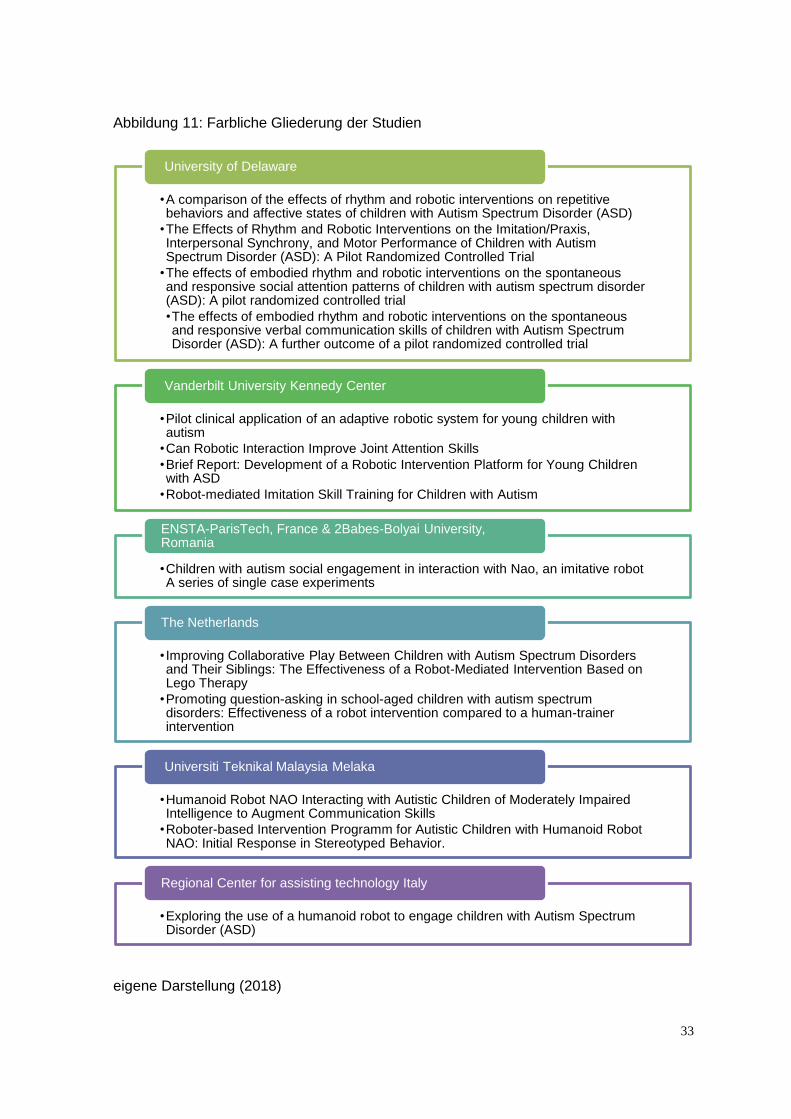
herangezogen. Um die Ergebnisse besser verstehen und zusammenhängende Studien
einer Forschergruppe besser identifizieren zu können, wurden diese mittels farblicher
Gliederung nachfolgend in Abbildung 11 geordnet. Es wurden eine Doktorarbeit des
Autors Srinivasan, der Universität von Delaware, bestehend aus vier einzelnen
Studienteilen, vier Studien der Vanderbilt University Kennedy Center, zwei Studien aus
den Niederlanden, zwei Studien der Universiti Teknikal Malaysia Melaka, eine Studie aus
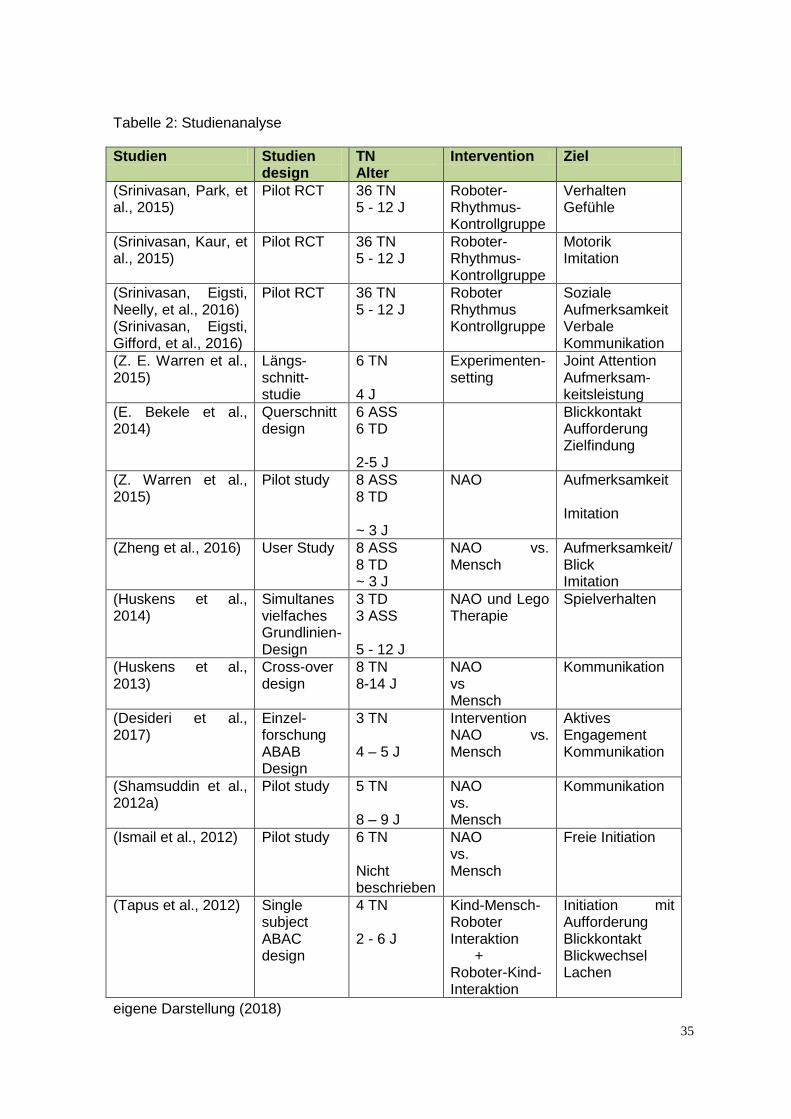
Italien und eine Studie aus Frankreich miteinbezogen. In Tabelle 2 erfolgt anschließend
eine kurze Erfassung der Studienaspekte. Eine detaillierte Ergebnispräsentation im
Hinblick auf das Setting, auf die Intervention, die TeilnehmerInnen und die
Studienergebnisse, befindet sich im Anhang.
33
Abbildung 11: Farbliche Gliederung der Studien
eigene Darstellung (2018)
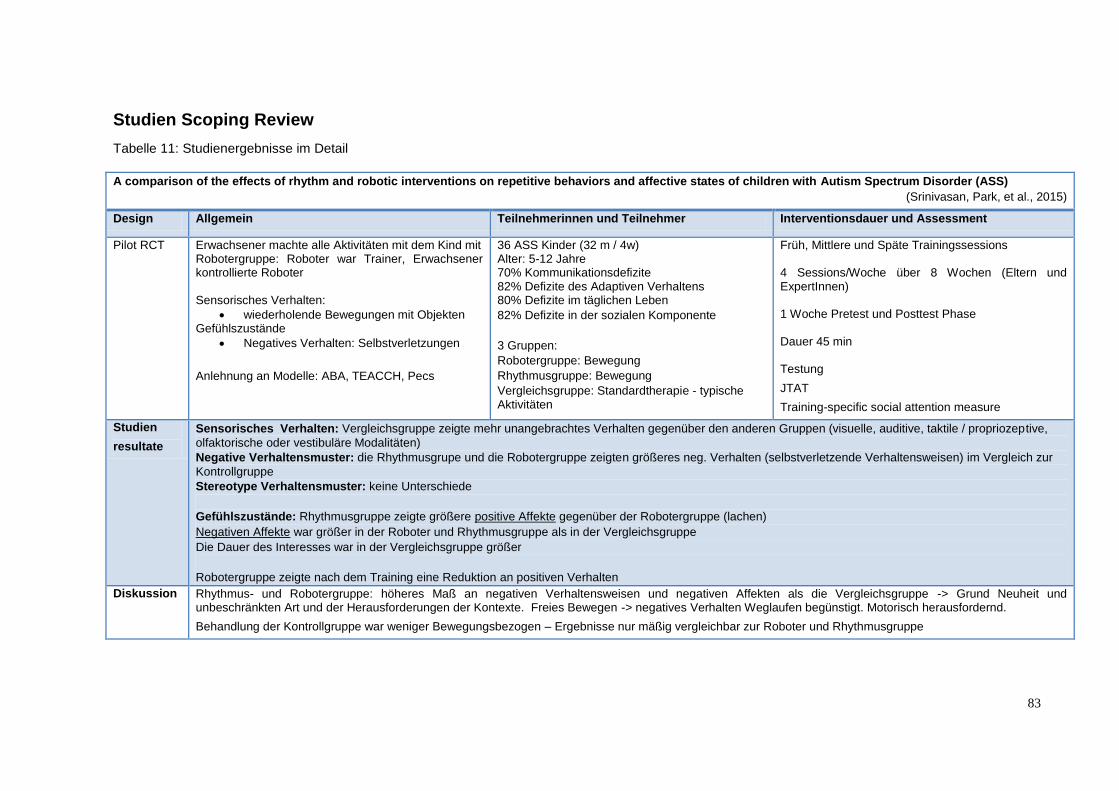
•A comparison of the effects of rhythm and robotic interventions on repetitive behaviors and affective states of children with Autism Spectrum Disorder (ASD)
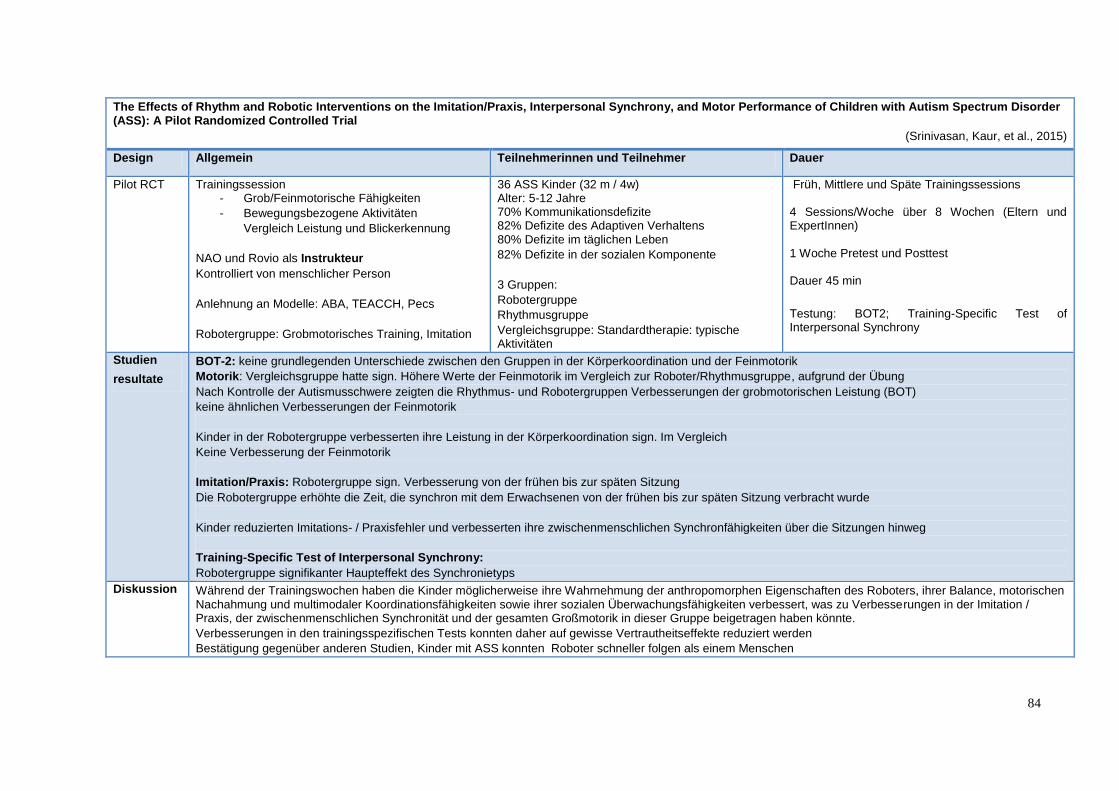
•The Effects of Rhythm and Robotic Interventions on the Imitation/Praxis, Interpersonal Synchrony, and Motor Performance of Children with Autism Spectrum Disorder (ASD): A Pilot Randomized Controlled Trial
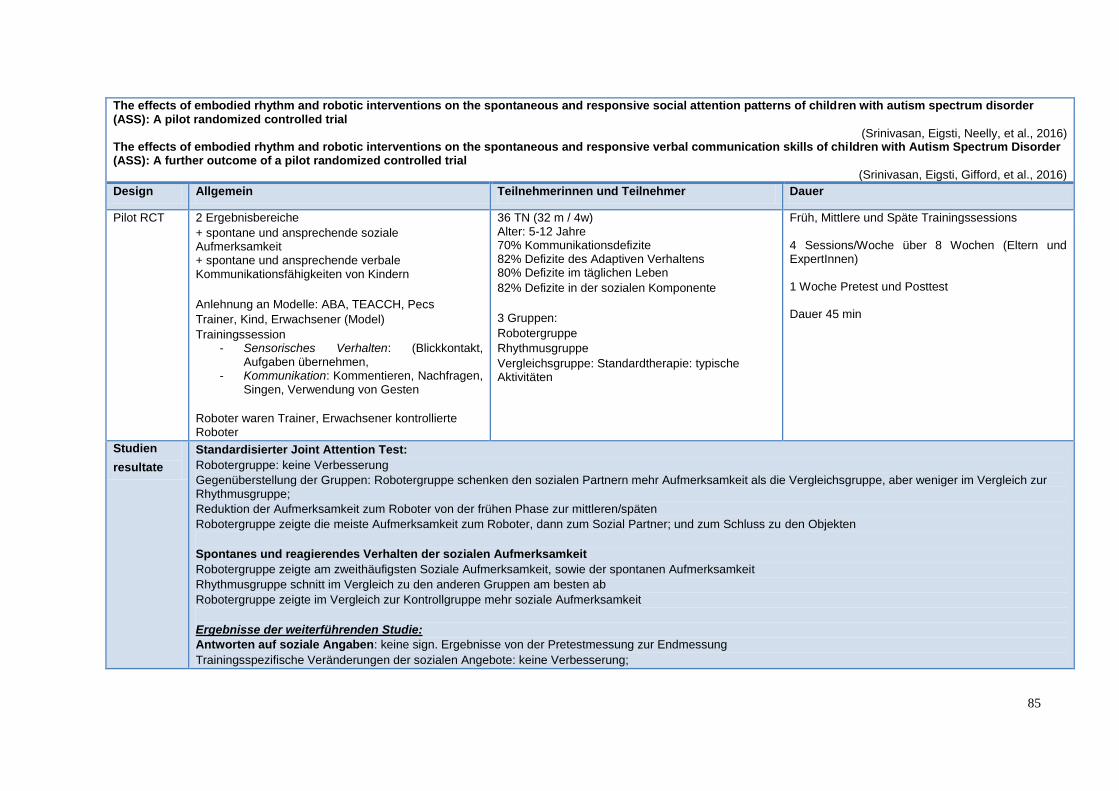
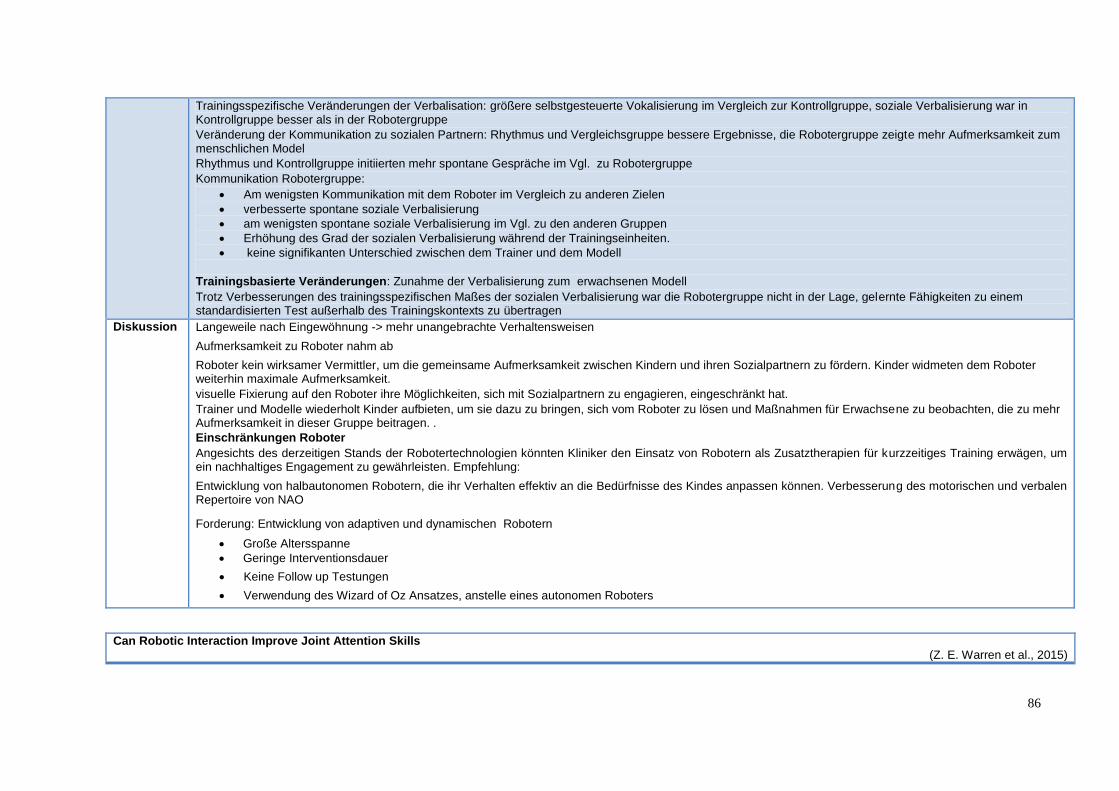
•The effects of embodied rhythm and robotic interventions on the spontaneous and responsive social attention patterns of children with autism spectrum disorder (ASD): A pilot randomized controlled trial
•The effects of embodied rhythm and robotic interventions on the spontaneous and responsive verbal communication skills of children with Autism Spectrum Disorder (ASD): A further outcome of a pilot randomized controlled trial
University of Delaware
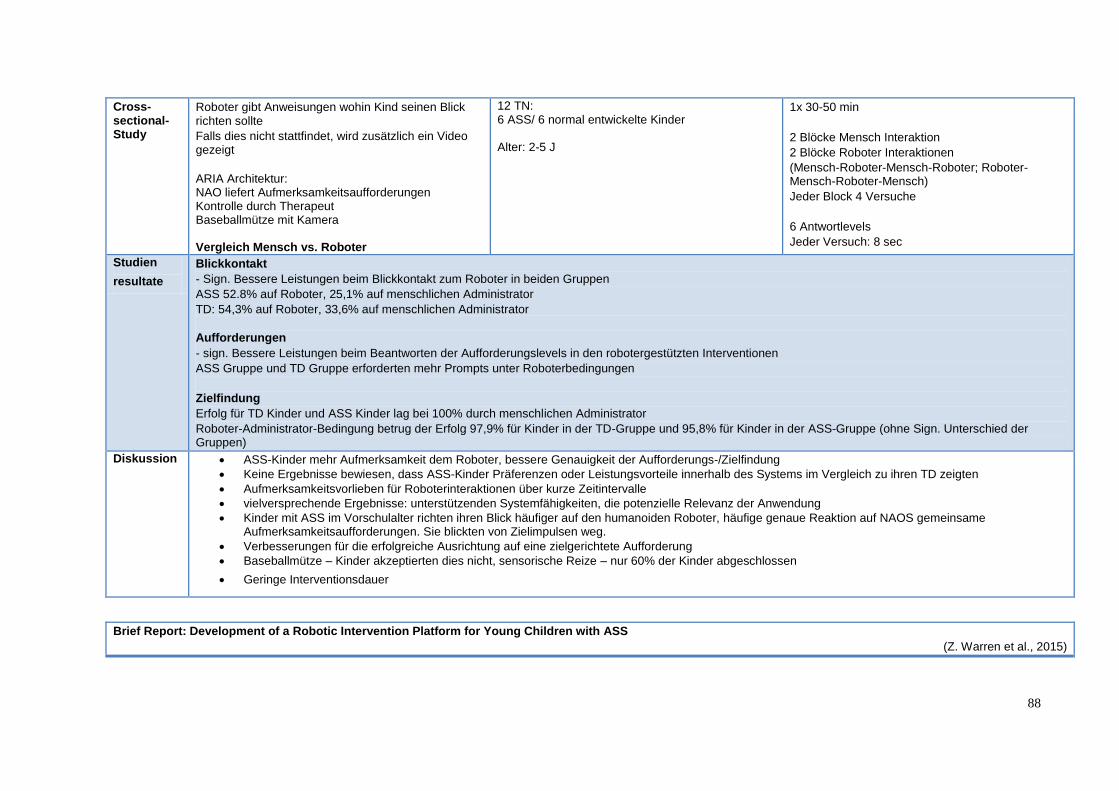
•Pilot clinical application of an adaptive robotic system for young children with autism
•Brief Report: Development of a Robotic Intervention Platform for Young Children with ASD
•Robot-mediated Imitation Skill Training for Children with Autism
Vanderbilt University Kennedy Center
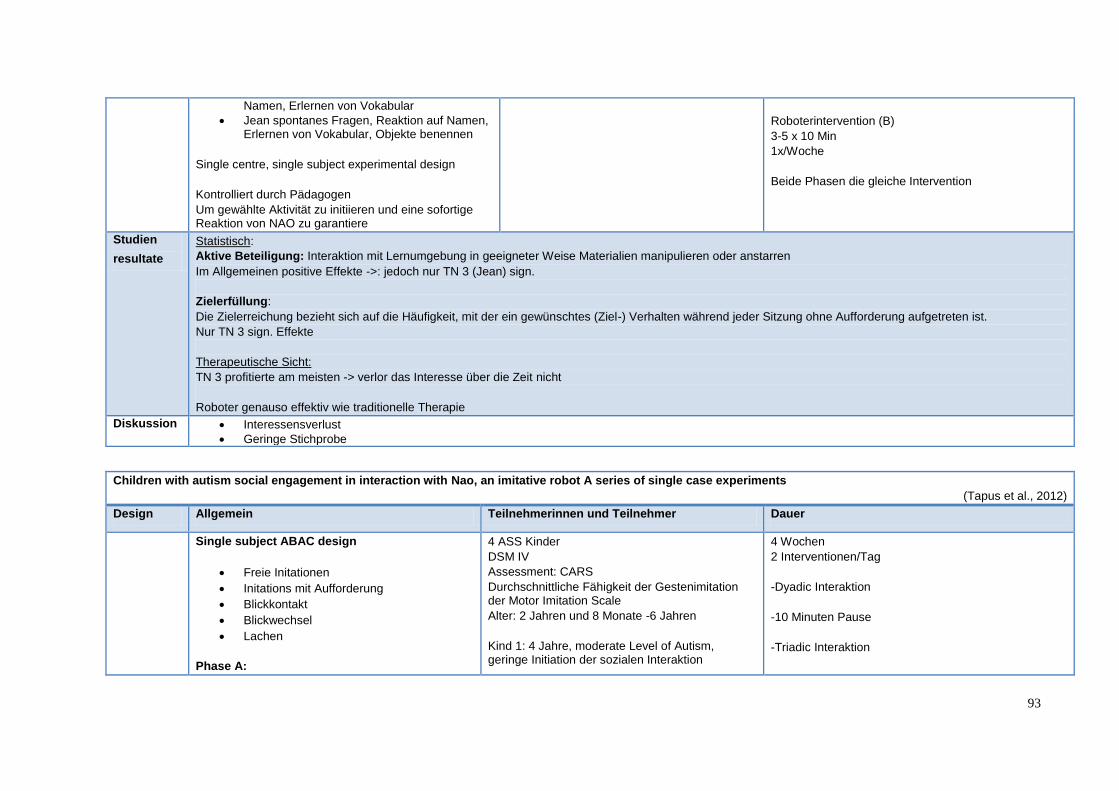
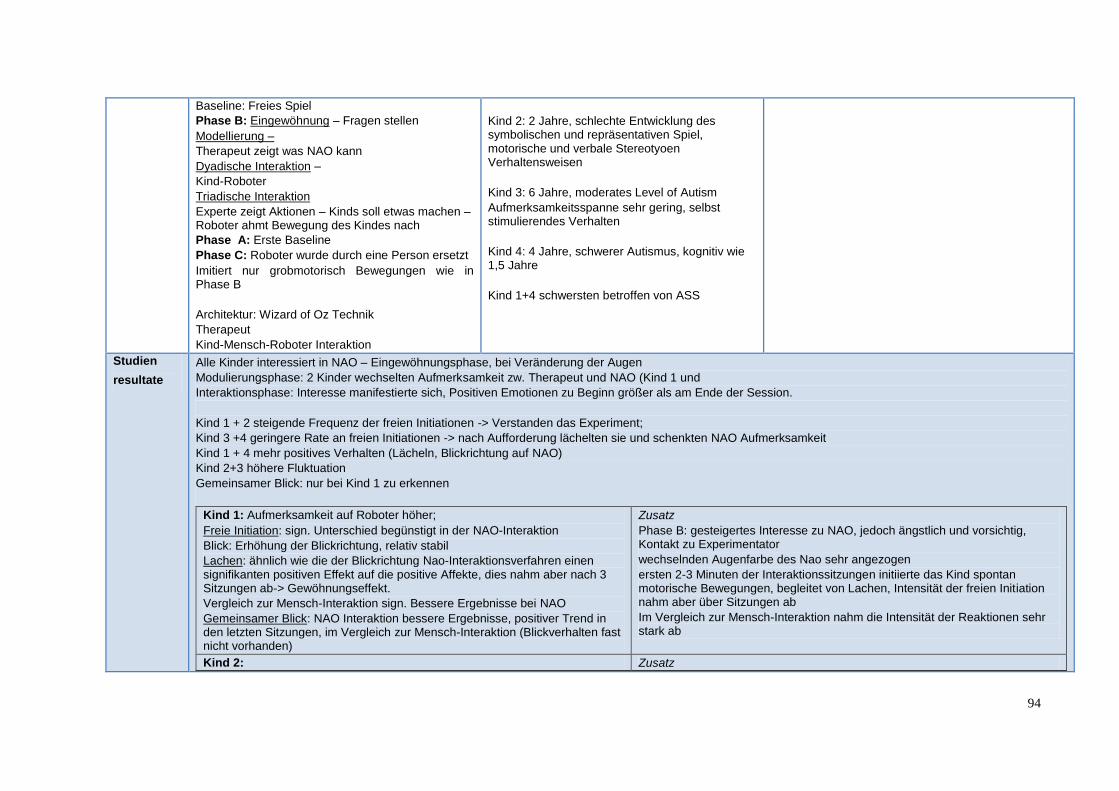
•Children with autism social engagement in interaction with Nao, an imitative robot A series of single case experiments
ENSTA-ParisTech, France & 2Babes-Bolyai University, Romania
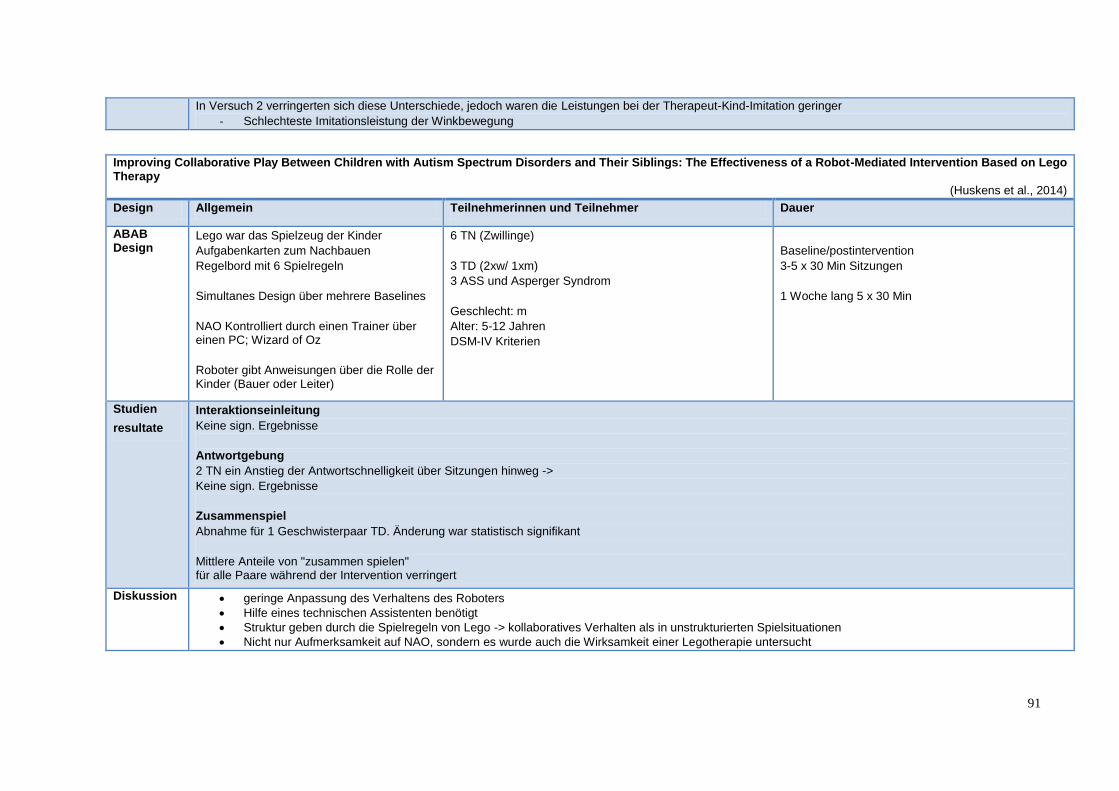
• Improving Collaborative Play Between Children with Autism Spectrum Disorders and Their Siblings: The Effectiveness of a Robot-Mediated Intervention Based on Lego Therapy
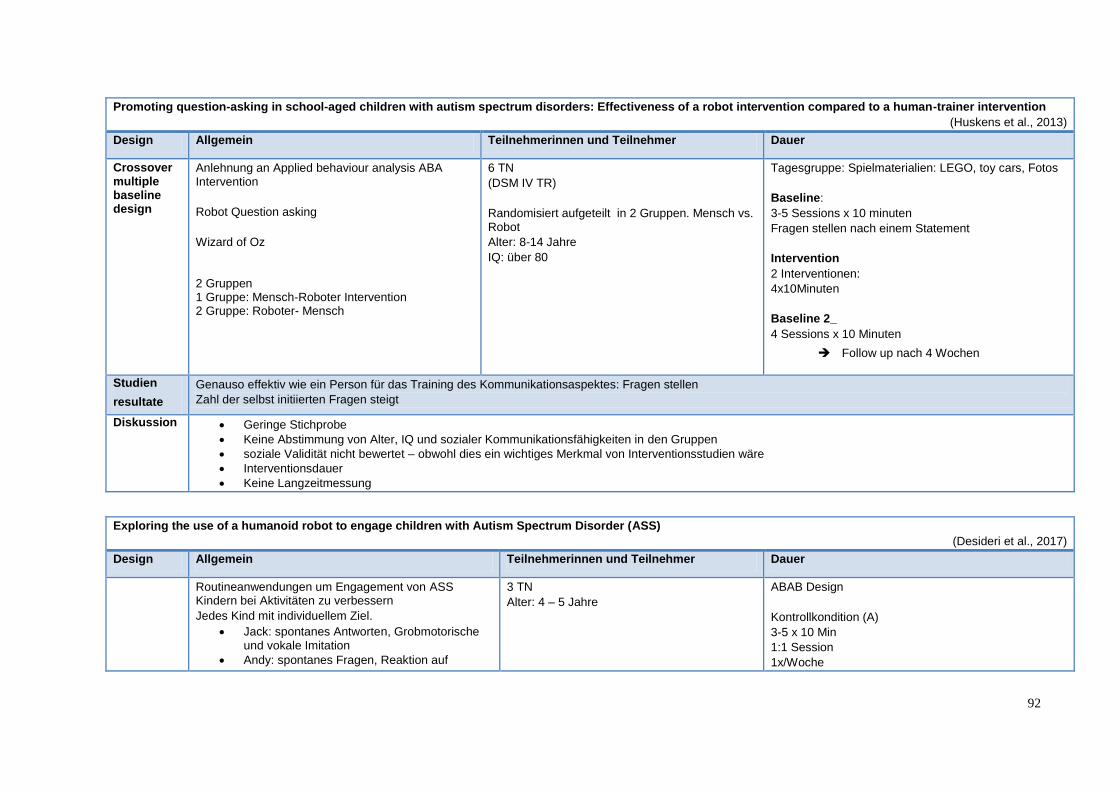
•Promoting question-asking in school-aged children with autism spectrum disorders: Effectiveness of a robot intervention compared to a human-trainer intervention
The Netherlands
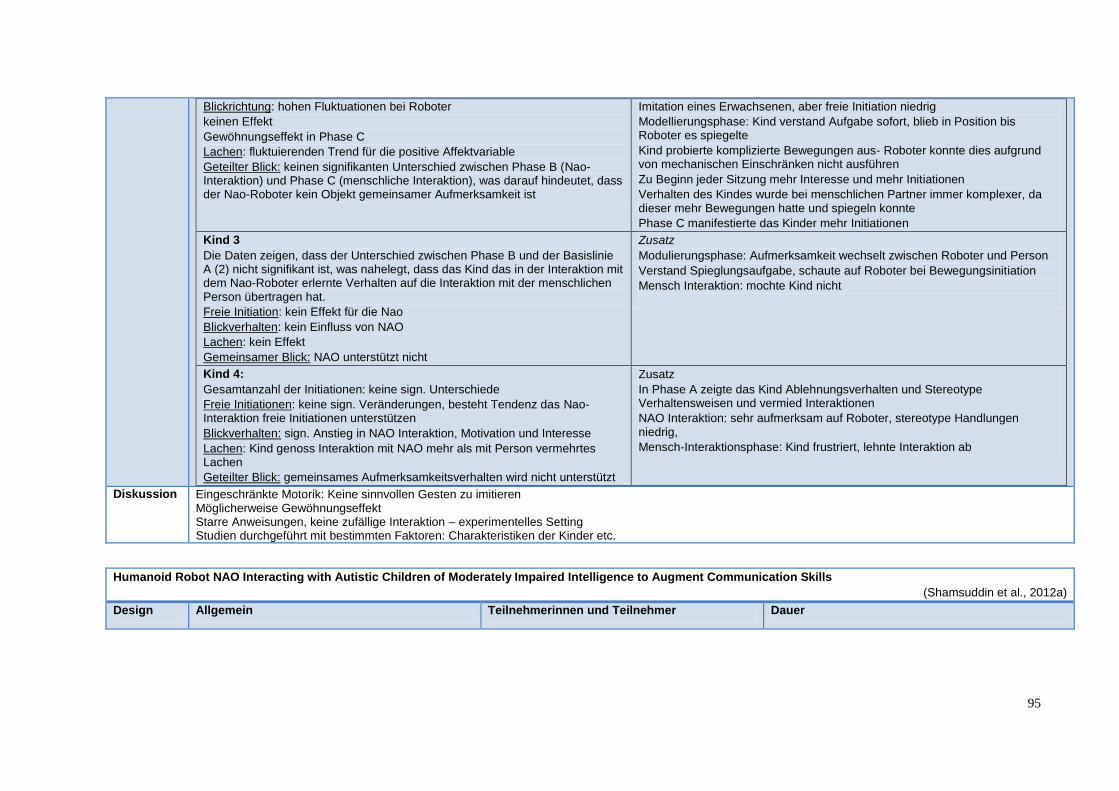
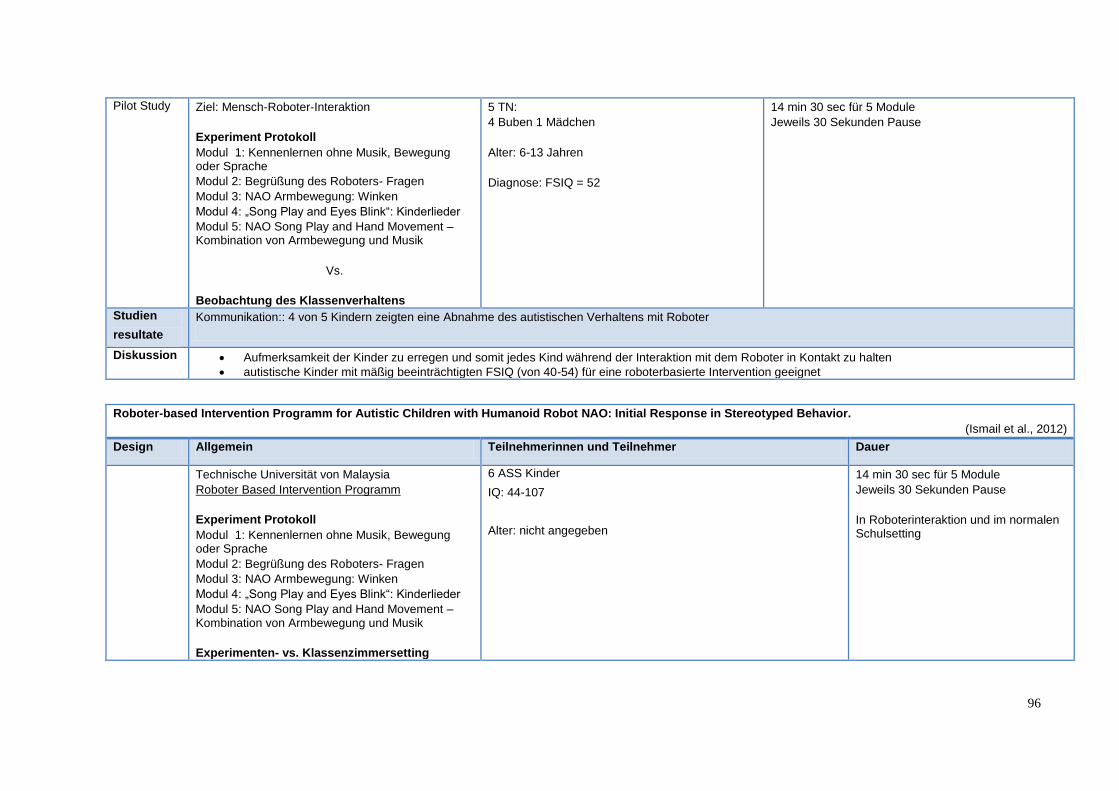
•Humanoid Robot NAO Interacting with Autistic Children of Moderately Impaired Intelligence to Augment Communication Skills
•Roboter-based Intervention Programm for Autistic Children with Humanoid Robot NAO: Initial Response in Stereotyped Behavior.
Universiti Teknikal Malaysia Melaka
•Exploring the use of a humanoid robot to engage children with Autism Spectrum Disorder (ASD)
Regional Center for assisting technology Italy
34
Nachfolgend erfolgt die Analyse der Ergebnisse hinsichtlich allgemeiner Ergebnisse,
Charakteristiken der Kinder, der Motivation und des Interesses, der autistischen Trias und
dem Roboter. Kapitel 3.6 enthält aufbauend auf den Ergebnissen des Scopingreviews die
Kategorisierung der Fragegruppen für die Diskussionsrunden.
3.1. Allgemeine Studienergebnisse
Die TeilnehmerInnenzahl in den Studien liegt zwischen 4 - 16 TN. Ausschließlich die
Studien der AutorInnen Srinivasan et al. inkludieren 36 TN (Srinivasan, Kaur, et al., 2015;
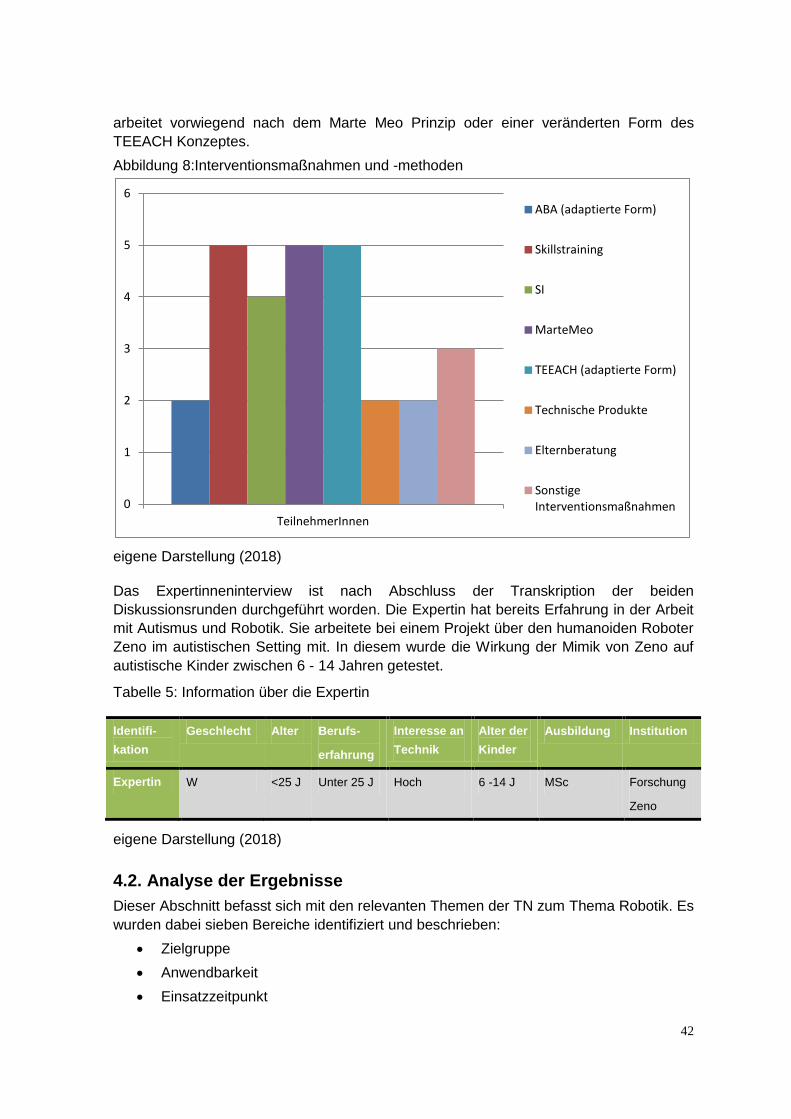
4.2.2. Was sollte NAO mitbringen? - Robotereigenschaften und Rolle
Alle TN beschreiben, dass NAO sicherlich als Verstärker oder Motivator dienen kann.
Auch wird NAO als Unterstützer für TherapeutInnen oder als CO-Therapeut gesehen
(Diskussionsrunde 1+2). Die Expertin kann sich in Zukunft, NAO auch als
Therapieassistenten vorstellen. Als Spielpartner wird NAO nicht gesehen, obwohl sich
TN1 und die Expertin über dessen Einsatz unsicher sind.
TN 1: „ …) ich glaub halt, dass es schwierig ist […] wenn ein Mensch mit dem Kind in
Interaktion tritt, dass er halt so ein Unterstützer sein kann …).“
Expertin: „ …) Spielpartner - ne das, […] wobei das ist schwierig. Ich denke, dass hätte
beides seine Vor- und Nachteile, aber ich glaub, dass ich ihn als Therapieassistenten
sinnvoller sehen würde, wenn man was lehren m chte. …) aber wenn man allgemein die
Interaktion fördern möchte, würds auch als Peergroup möglicherweise auch Sinn
machen.“
Es wird in zwei Diskussionsrunden darauf hingewiesen, dass NAO keine Therapeutin
bzw. keinen Therapeuten ersetzen kann.
TN 2: „ …) im Endeffekt muss trotzdem eine Person dahinter stehen, um zu sehen wie
die Patienten das machen …).“
Die Therapeutinnen sowie die Expertin sehen NAO als ersten Schritt oder
Zwischenelement.
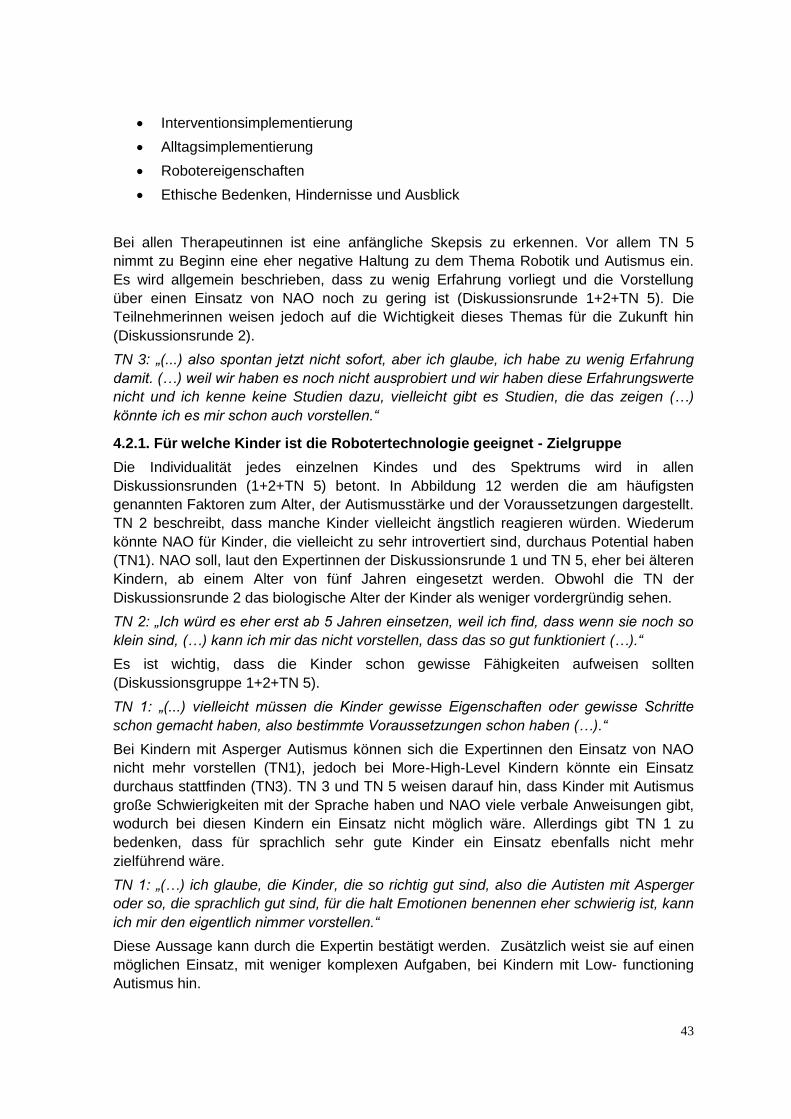
mögliche Zielgruppe
ausreichende sprachliche
Entwicklung und Kognition
ältere Kinder
ab 5 Jahren
Autismusstärke High functioning
Autismus Low functioning
Autismus
45
TN 3: „ …) vielleicht ist es eben für manche ein erster Schritt.“
Expertin: „[…] also ich glaub schon, wenn man es gut macht, und wenn man es halt
begleitet und den Roboter halt wirklich nur als Zwischenmedium vereinzelt einsetzt und
nicht nur mit dem Roboter arbeitet.“
Zum Aussehen, der Stimme und der Bewegungen von NAO werden folgende Aspekte
der TN beschrieben. Das Aussehen von NAO wird insgesamt von allen TN als positiv und
süß bewertet (Diskussionsrunde 1+2+TN 5). TN 4 beschreibt, dass weniger das
Aussehen für Kinder mit ASS wichtig ist, sondern vielmehr die Fähigkeiten wie das
Blinken der Augen. Des Weiteren wird von einer Therapeutin darauf hingewiesen, dass
es wichtig ist, den Roboter von einem Menschen unterscheiden zu können (TN3). Auch
bezogen auf die Kleidung oder sonstige Tools sieht eine Therapeutin nicht als relevant
(TN1). Die Diskussionsgruppe 1 können sich eine andere Farbgebung des Roboters
vorstellen. Sie geben aber an, dass dieser, aufgrund einer möglichen Reizüberflutung,
nicht zu bunt sein sollte. Die nicht vorhandene Mimik, sowie die geringen sprachlichen
Nuancen werden zum Teil als positiver Aspekt gesehen, jedoch weisen die
Therapeutinnen auf den fehlenden Transfer in den Alltag hin (Diskussionsrunde 1+2+TN
5). Eine Therapeutin beschreibt die fehlende Mimik als mögliche Hilfe für Kinder. Sie
erklärt, dass Kinder so lernen könnten auf welche Faktoren sie beim Menschen beachten
müssen. Vor allem da Kinder mit Autismus Schwierigkeiten haben die Strukturen des
Gesichtes zu erkennen und die Vielzahl an Reizen zu verarbeiten. Die Interpretation der
Mimik ist zudem ein wichtiges Ziel (TN 2).
TN 1: „ …) einerseits find ich‘s gut, weil’s irgendwie, ja wie du gesagt hast. Es ist einfach
irgendwie, sozusagen nicht so eine Überwindung […], wenn sie dir ins Gesicht schauen,
weil da dann nicht wirklich eine Reaktion folgt von jemanden, das ist halt … Die Kinder
wissen ja, man merkt ja, es ist kein Mensch. Sie können ins Gesicht schauen ohne sich
zu …) „schämen“ …).“
TN 4: „ …) ich find auch gut, dass man sieht, dass er ein Roboter ist und man klar
unterscheiden kann, das ist kein Mensch.“
TN 5: „ …) meine Frage dahinter ist halt wirklich: Wo ist die Mimik? Ein Kind mit Autismus
muss halt erst versuchen die Menschen zu lesen oder die Mimik. Das ist [...] ein wichtiges
Ziel eigentlich und das kann es ja mit dem Roboter eigentlich nicht (...).“
Zwei TN sehen die Sprache von NAO als einerseits weniger verwirrend, durch die
monotone und gleichbleibende Stimmlage, andererseits kommt es dadurch zu einer
fehlenden Vermittlung von Emotionen (TN1 + TN3).
TN 3: „ ...) ich glaub, es ist die Frage was man möchte. Also ich glaub, dass diese
roboterähnliche Sprache halt eine ist, [...] wo eben diese ganzen Emotionen, die man ja
auch sprachlich vermitteln kann, viel weniger rüberkommen und daher manchmal für die
Kinder sicher weniger verwirrend ist, weil es ist eher monoton und gleichbleibend und das
macht‘s sicher für diese Kinder leichter (...).”
Die Bewegungen werden als sehr menschenähnlich und adäquat angesehen (TN1 +
TN3).
4.2.3. Wo kann der Roboter seinen Einsatz finden? - Anwendbarkeit
Die Therapeutinnen glauben nicht, dass NAO zurzeit schon so weit entwickelt ist, um als
Tool zur Interaktionsvermittlung zu dienen (TN3, 4, 5). Jedoch weisen sie auf zukünftiges
46
großes Potential hin. Auch die Expertin sieht die Robotertechnologie noch nicht genug
ausgereift, um diese schon in die Therapie vollends implementieren zu können.
Expertin: „Aktuell würd ich […] mich zurückhalten mit solchen Sachen. …) Ich glaube,
dass gerade […] die Therapie, aktuell noch nicht so weit ist, für diesen Schritt. Also wenn
ein Konzept steht, wie man es einsetzen kann, […] denke ich, dass auch die ersten bereit
dafür wären […] aber ich glaube, dass es gerade noch […] in den Anfangsschuhen ist
…).“
Zurzeit könnte NAO helfen Aufträge und Anweisungen zu erfüllen (Diskussionsrunde
1+2), die Konzentration (TN 3) sowie die Aufmerksamkeit steigern oder zur sprachlichen
Entwicklung (TN 1) beitragen. Außerdem herrscht eine Verbesserung des Blickkontaktes
vor (Expertin).
Expertin: „ …) die Kinder waren aber total begeistert, die haben mehr Blickkontakt mit
dem Roboter gehalten, die autistischen Kinder halt einmal oft in die Augen geschaut, was
sie beim Menschen ja versuchen zu vermeiden und das war spannend …).“
In der Diskussionsgruppe 2 wird der Fokus auf die Interaktionsfähigkeit von NAO gelegt.
Die Therapeutinnen betonen dabei, dass sie Probleme mit dieser einseitigen Art von
Interaktion haben, da NAO in den Videos nur Befehle gibt. NAO sei seitens der TN
zurzeit kein Tool zur Vermittlung von Interaktion und Emotionen. Auch verweisen die
Therapeutinnen, dass eventuell für jedes individuelle Ziel der Intervention ein anderer
Roboter gebraucht werden könnte (Diskussionsrunde 1).
TN 3: Ich merk, ich hab totale Probleme, dass alle betonen, dass es hier um Interaktion
geht, weil ich find, es geht überhaupt nicht um Interaktion sondern der Roboter sagt was
und die Kinder müssen es machen und das ist nicht die Interaktion von hin und her …).“
TN 4: „ ...) aber eben, ich find auch, dass das kein Tool ist, um Interaktion und
Emotionalität zu üben …).“
Für die tatsächliche Anwendbarkeit weisen alle Diskussionsrunden auf den fehlenden
Alltagstransfer hin.
TN 3: „ ...) für mich ist ein bisschen die Frage: Kann man das wirklich dann transferieren,
wenn nur dieses Lernen und üben von „jemand zeigt wohin“ oder „Der Roboter zeigt
wohin.“ …) davon hat er in seinem Alltag nichts. Also für mich wär spannend zu sehen,
wie funktioniert denn der Transfer oder ist das halt eine Splitterfähigkeit, die er mit dem
Computer lernt, weil das halt spannend ist, aber die im eigentlichen Alltag nichts bringt
…).“
Die Interessens- und Motivationssteigerung der Kinder ist laut allen Teilnehmerinnen
durchaus gegeben und wird in den Diskussionsrunden häufig hervorgehoben. Dieser
Motivationsaspekt ist auch bei der Expertin im Vordergrund. Die Teilnehmerinnen der
Diskussionsrunde 2 können bezüglich eines Langzeitinteresses keine konkrete Aussage
liefern. Einerseits geben sie an, dass ein Langzeitinteresse vermutlich gegeben sein
könnte, andererseits stellt sich die Frage, ob auf lange Sicht nicht doch eine Habituation
auftritt. Die Expertin beschreibt aber, dass die Robotertechnologie nur als Intervention
eingesetzt wird und somit weiterhin ein Interesse besteht.
TN 4: „ …) Und manche autistischen Kinder finden es sicher immer interessant, weil sie
ja Veränderungen eh nicht mögen und sie sich freuen wenn es immer das gleiche ist,
aber vom A A kennt man ja, dass die Kinder dann Dinge einfach […] so integrieren
[integriert], dass es irgendwie kein Verstärker mehr ist und dann kann der Roboter tun
47
was er will und auf den Kopf stellen und Purzelbäume schlagen und das ist dann einfach
langweilig …).“
4.2.4. Einsatz zum richtigen Zeitpunkt - Einsatzzeitpunkt
In Bezug auf den Einsatzzeitpunkt können die Therapeutinnen keine konkrete Aussage
treffen. Möglicherweise ist er als Ritual, als Morgenkreis (TN1) oder Einstieg in die
Therapie ein entsprechendes Tool (Diskussionsrunde 1+2+TN 5). Da Kinder auf
Veränderungen sehr stark reagieren, wäre dies eine Möglichkeit ihn zu implementieren
(TN3). Jedoch sollte man den Roboter nicht in der ersten Therapieeinheit dem Kind
präsentieren (Diskussionsrunde 1+2+TN 5), da es wichtig ist eine gute Basis zur
Therapeutin bzw. zum Therapeuten herzustellen und nicht zu einem Roboter (TN5). Die
Einführung von NAO soll des Weiteren langsam und im Laufe der Therapie immer wieder
erfolgen (TN1).
TN 5: „ ...) ich glaube auf jeden Fall nicht am Anfang, weil ich find, es sollte zuerst eine
gute Beziehung zur Therapeutin da sein …).“
TN 1: „ ...) aber halt langsam und dann halt beispielsweise so als Ritual, dass man ihn
halt immer wieder hernimmt und halt mit ihm gewisse Sachen übt …).“
Die Expertin gibt an, dass sie sich einen Einsatz von NAO grundsätzlich in vielen
Gebieten vorstellen kann. Vor allem, um eine gewisse Hemmschwelle der Kinder zu
beseitigen, und um dem Kind die Angst vor der sozialen Interaktion zu nehmen. Auch
kann NAO als Tool eingesetzt werden, um einen ersten Zugang zu dem Kind oder das
Vertrauen herzustellen (Diskussionsrunde 1). TN 1 beschreibt auch, dass es
möglicherweise weniger Überwindung kostet in das Gesicht des Roboters zu blicken.
TN 2: „ ...) oder wenn man halt zu einem Kind überhaupt keinen Zugang findet, weil‘s halt
sehr in seiner Welt ist, dass halt das vielleicht noch eine Möglichkeit ist eventuell einen
Zugang zu schaffen, weil vielleicht ffnen halt der Roboter „neue Türen“ oder halt
Möglichkeiten einen Zugang zu finden (…).“
Auch bei einer stagnierenden Therapie kann NAO laut einer TN nützlich sein (TN5).
TN 5: „ ...) wenn das Kind vielleicht schon erste Fortschritte gemacht hat (…) oder
vielleicht, wenn die Therapie ein bisschen stagniert und man gerade nicht weiß …) wie
bekomme ich das Kind wieder …) wie motivier ich das Kind wieder, dann k nnte ich mir
das schon gut vorstellen, dass man den NAO einmal nimmt und dadurch vielleicht die
Motivation erh ht.“
4.2.5. Implementierung in Methoden, Maßnahmen und Therapieinterventionen -
Interventionsimplementierung
Alle Therapeutinnen weisen auf ein vorher festgelegtes Ziel der Therapieeinheit hin, wie
NAO eingesetzt werden kann (Diskussionsrunde 1+2+TN 5). Eine Teilnehmerin gibt in
Hinblick auf das Setting Hinweise. Es wäre bei einer Intervention mit NAO eine
Reizabschirmung von sonstigen Stimuli nötig, da sich Kinder in einer lauten Umgebung
weniger konzentrieren können (TN1).
TN 1: „ ...) ja da müsst halt dann voll die Reizabschirmung sein, dass halt dann wirklich nur der Fokus auf das ist, weil wir tun sich auch oft schwer, dass man die Aufmerksamkeit bekommt von einem Kind, dass wenn man jetzt in einer lauten Gruppe ist in einer Umgebung der Roboter dasteht und redet, es kommen alle hin und keiner hört halt zu …).“
48
Die Möglichkeit des Einsatzes als ergotherapeutisches Tool wird in allen
Diskussionsrunden bestätigt, jedoch ist es nicht möglich, ihn in jede Methode zu
implementieren. In allen Diskussionsrunden wird ein Einsatz beim Skillstraining und bei
ABA gesehen. Bei Marte Meo (Diskussionsrunde 1+ TN 5) und bei TEEACH
(Diskussionsrunde 1+2) ist ebenfalls ein Einsatz vorstellbar. Die SI-Methode erkennt die
Expertin als mögliches Einsatzgebiet, wobei sich die Teilnehmerinnen der
Diskussionsrunden keinen Einsatz in diesem Bereich vorstellen können. Die Methode der
Social Stories wird von TN1 als potentielle Möglichkeit gesehen. FloorTime ist für den
Einsatz von NAO nicht geeignet (TN3).
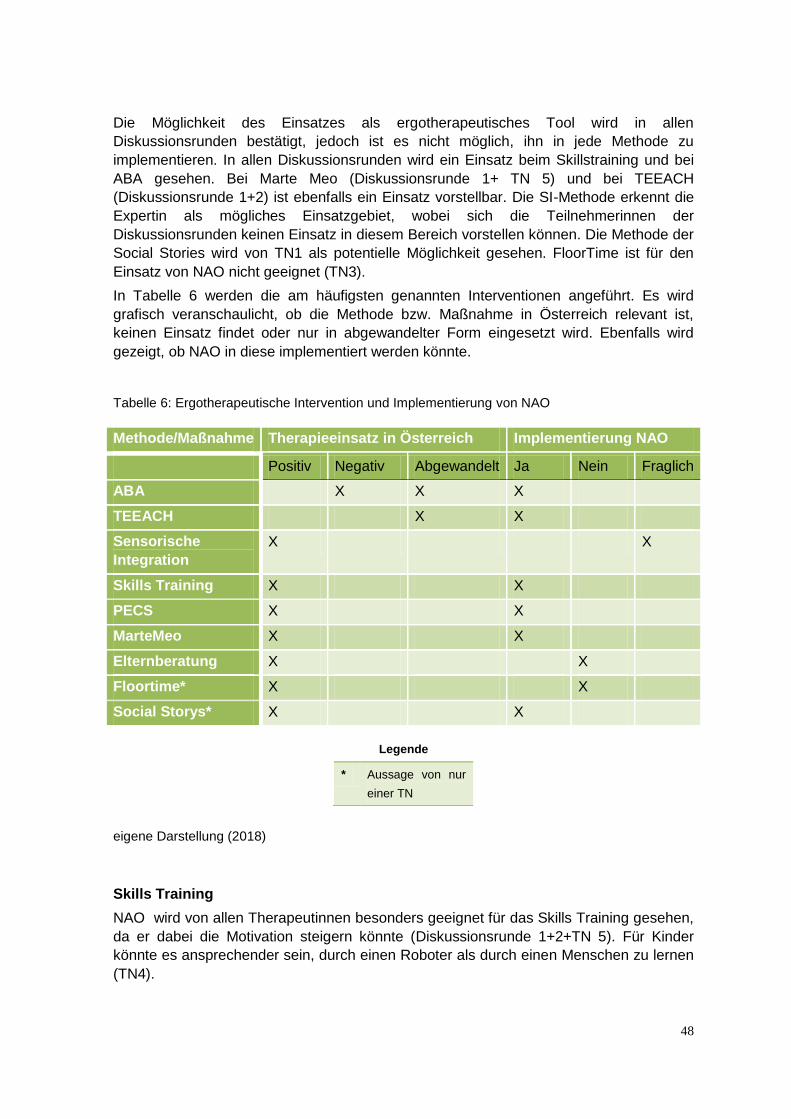
In Tabelle 6 werden die am häufigsten genannten Interventionen angeführt. Es wird
grafisch veranschaulicht, ob die Methode bzw. Maßnahme in Österreich relevant ist,
keinen Einsatz findet oder nur in abgewandelter Form eingesetzt wird. Ebenfalls wird
gezeigt, ob NAO in diese implementiert werden könnte.
Tabelle 6: Ergotherapeutische Intervention und Implementierung von NAO
Methode/Maßnahme Therapieeinsatz in Österreich Implementierung NAO
Positiv Negativ Abgewandelt Ja Nein Fraglich
ABA X X X
TEEACH X X
Sensorische
Integration
X X
Skills Training X X
PECS X X
MarteMeo X X
Elternberatung X X
Floortime* X X
Social Storys* X X
eigene Darstellung (2018)
Skills Training
NAO wird von allen Therapeutinnen besonders geeignet für das Skills Training gesehen,
da er dabei die Motivation steigern könnte (Diskussionsrunde 1+2+TN 5). Für Kinder
könnte es ansprechender sein, durch einen Roboter als durch einen Menschen zu lernen
(TN4).
Legende
* Aussage von nur
einer TN
49
TN 4: „ ...) Dafür eignet er sich hervorragend. Da ist die Motivation sicher auch hoch, weil
es eben nicht die Mama oder die Therapeutin sagt, sondern ein kleines Ding …).“
TN 4: „ …) es gibt ja manchmal so Situationen, wo die Kinder eine gewisse Fertigkeit
einfach jetzt schon brauchen …) und da nehm ich mir den jetzt her, weil der so einen
hohen Motivationscharakter hat, jetzt gerade und dann üben wir das damit …).“
Auch zum Geben von Anleitungen kann NAO, beispielsweise beim ADL Training nach
Ansicht der Therapeutinnen (Diskussionsrunde 1+2) hilfreich sein. Sie sehen die Schritt
für Schritt Anweisungen, die NAO geben kann als potentiellen Nutzen.
TN 3: „ …) dann hätt ich das empfunden als „Ja“: wenn es eine Hilfe ist, um Dinge
leichter lernen zu können für den Alltag. (...) so Sachen wie Schuhe anziehen. (...) Das
man den vielleicht nutzen kann, dass er es vorzeigt und das Kind macht‘s nach oder das
der Anweisungen gibt.“
TN 4: „ ...) oder das er halt so Schritt für Schritt Anweisungen gibt […]. Das ist ja auch
was womit man oft arbeitet. halt was ist als erstes zu tun, was ist danach zu tun und
wenn er da so ein Zwischenelement sein kann, und sagt: „Jetzt musst du das tun“ …).“
ABA
Alle Therapeutinnen assoziieren NAO mit ABA. Jedoch stehen die Ergotherapeutinnen
(Diskussionsrunde 1+2) diesem Konzept kritisch gegenüber.
TN 3: „ ...) erinnert mich eben eher auch an A A und Antrainieren von bestimmten
Fähigkeiten, was ja nicht immer schlecht sein muss, aber ich finde eben auch als Ergos
ist das Essentielle was hat er davon in seinem Alltag …).“
TN 1: „ ...) ich find zu A A passt‘s- aber bei A A bin ich kein efürworter …).“
TEEACH
Eine Integration NAOs als Motivator oder Anleiter im TEEACH Konzept wäre, durch die
vorgegebene Struktur des Konzeptes, möglich (Diskussionsrunde 1+2).
TN 2: „ ...) beim TEEACH Konzept eventuell, weil wir arbeiten eben mit den
Tagesverläufen mit den ildkarten wo’s die Tageabläufe gehen und dann die Bildkarte
runter nehmen, eben dass sie wissen was drankommt und da vielleicht so unterstützend,
als Motivator oder Leiter eben.“
TN 3: „ …) Eben bei TEEACH ja klar kann der die Anweisungen geben, die sonst der
Erwachsene gibt oder der Therapeut oder der Pädagoge. …) aber wahrscheinlich auch
wenn er entsprechend programmiert ist, Rückmeldung geben ob‘s richtig ist oder falsch
ist oder versuch‘s nochmal. Das kann er ja sagen …).“
Eine Therapeutin sieht den Einsatz von NAO im TEEACH Konzept nicht gegeben (TN5).
Marte Meo
TN 1 ,2, 5 können sich auch vorstellen NAO bei Marte Meo einzusetzen. Dabei könnte er
durch eine Vermittlung von Feedback, Verhaltensweisen des Kindes bestätigen und
benennen, welche von den TherapeutInnen möglicherweise übersehen werden (TN5).
TN 3 sieht keinen Einsatz in der MarteMeo Therapie für NAO.
TN 5: „ ...) weil ein Element von MarteMeo ist zum eispiel dieses estätigen oder
Benennen. Was macht das Kind eigentlich und ich glaube, wenn das ein Roboter kann,
wäre es eine große Erleichterung für die Therapie. Weil es ist ganz schön anstrengend
als Therapeutin, eine ganze Einheit aufmerksam zuzuschauen was das Kind macht und
immer die Initiative vom Kind aufzugreifen und zu bestätigen oder zu benennen. …).“
50
Sensorische Therapie
Die TN sehen NAO nicht als Intervention zur Vermittlung von sensorischen Reizen
(Diskussionsrunde 1+2). Die Expertin beschreibt jedoch, den Roboter durchaus als
Vermittler und als Motivator erfolgreich genutzt zu haben.
Social Stories und FloorTime
Auch bei der Methode der Social Stories kann NAO möglicherweise eingesetzt werden.
Dabei geht es um das Erlernen von adäquaten Verhaltensweisen im Alltag (TN1).
TN 1: „Also ich kann mir auch vorstellen bei Social stories den einzusetzen den Roboter
weil da geht‘s darum, zum Beispiel in gewissen Alltagssituationen, dass man dem Kind
irgendwie erklärt, wie man sich richtig zu verhalten hat. …) Halt so, dass man gewisse
soziale Situationen davor schon mal lernt sozusagen, damit man‘s dann mit anderen
einsetzen kann …). […] Gewisse Rollenspiele vielleicht …).“
Das Konzept Floor Time wird als nicht geeignet für einen Einsatz von NAO beschrieben
(TN4).
4.2.6. Implementierung in die Tagesstruktur, Freizeit, Schule oder Kindergarten -
Alltagsimplementierung
Die Therapeutinnen der Diskussionsrunde 1 können sich NAO als Unterstützer für die
Tagesstruktur vorstellen. Beispielsweise beim Morgenkreis, bei speziellen Ritualen oder
auch beim Anleiten von ADL Tätigkeiten (Diskussionsrunde 1+2).
TN 2: „ …) da kann ich‘s mir vorstellen so bei ADL-Tätigkeiten …).“
TN 2 kann sich NAO auch als Personalersatz oder als eine Art Hilfskraft vorstellen.
TN 2: „ …) möglich weil halt einfach zu wenig Leute sind, zu wenig Erwachsene. Bei
solchen Dingen wie wir machen bei der Jause oder beim Mittagessen Tisch decken mit
Tischset, Teller, Becher und halt, was sie halt alles brauchen, …) da wär ein Roboter, als
zusätzliche Hilfskraft eigentlich, weil muss er nur sagen, bei Kindern, die das halt
befolgen können und verstehen, nimm bitte das Tischset, nimm bitte den Teller oder
sowas. Oder ich hab auch so beim Anziehen halt. …).“
Eine Teilnehmerin kann sich NAO auch als Freizeittool vorstellen, da autistische Kinder
auch die Möglichkeit brauchen, ohne soziale Interaktion einer Beschäftigung
nachzugehen (TN3). TN 1 bezeichnet NAO auch als eine Art von „Furby“. Jedoch sollte
NAO nicht ständig eingesetzt werden und somit kein Einsatz in der Therapie und
zusätzlich zu Hause stattfinden (TN1).
TN 4: „ …) als Freizeitbeschäftigung irgendwie nutzen und noch dazu kann man dem
NAO sagen wir möchten gerne, dass er das lernt. Dann machen sie das gemeinsam also
das ja. weil die Kinder brauchen einfach auch Auszeit und sie brauchen auch die
Möglichkeit auch mal nicht sozial zu interagieren, weil das ist eh so anstrengend für sie
und da kann man das sicher einsetzen unter Umständen. Genauso wie andere dann
Playstation spielen …).“
Ebenfalls wird von der Expertin eine Implementierung in eine Integrationseinrichtung, wie
dem Kindergarten oder der Schule, als geeignet empfunden, da er dem Kind helfen
könnte mit anderen Kindern besser zu interagieren.
Expertin: „ …) auch in der Praxis oder ähnliches selber, sondern ich finde auch, dass
wenn man ihn in Intergrations […] Einrichtungen geht, in der Schule oder im Kindergarten
[…] dass man ihn da auch einsetzen könnte. Einfach um den Kind im Umfeld zu helfen.
51
einfach zu schauen [gucken], dass das Kind auch die anderen rund herum besser
versteht und das man halt mit anderen Kindern. Es hat zum Beispiel auch schon Studien
gegeben [...] wo man nur zu zweit mit dem Roboter spielen konnte. Das heißt, man
müsste mindestens mit einem anderen Kind zusammen spielen und sowas denk ich, find
ich super dann auch […] um den Transfer dann auch wirklich zu machen, und das zu
fördern …).“
Im Bezug auf eine Implementierung in den Kindergarten wird in Diskussionsrunde 1 die
Akzeptanz anderer Eltern als Bedenken angegeben.
4.2.7. Ethische Bedenken, Hindernisse und Ausblick der Therapeutinnen
Die Kritik aller Therapeutinnen bezieht sich hauptsächlich auf die Frage nach einem
Alltagtransfer. In der Diskussionsrunde 2 stellt dieser Aspekt eine entscheidende Rolle
und den ausschlaggebenden Faktor für den Einsatz von NAO dar. Sollte dies
gewährleistet sein, ist einem Einsatz nichts entgegenzusetzen. Es wird dabei immer das
Ziel der Ergotherapie, im Alltag möglichst selbstständig zu sein, betont.
TN 4: „ …) die Frage ist, kann man das dann wirklich nutzbar machen, bringt ihm das
was in seinem alltäglichen Leben und das ist ja das was wir eigentlich wollen als
Therapeuten, dass es den Kindern dann wirklich im Alltag was bringt …).“
Auch das NAO nur Befehle gibt, stellen die Therapeutinnen als limitierend dar. In der
Diskussionsrunde 2 werden Anforderungen aufgeworfen, dass NAO mehr Interaktion
zeigen sollte. Laut den Therapeutinnen 3 und 4 ist es sehr wichtig, dass NAO die Kinder
imitieren und die Aufmerksamkeit von sich auf andere Kinder lenken kann.
TN 3: „ …) also für mich wäre interessant zu wissen, hilft ihnen das tatsächlich dann auch
zu imitieren? Wie halt andere Kinder lernen durch Imitation, im Sinne von: Ich schau
einem anderen Kind zu was es mit diesem Spielzeug macht oder was es auf der Rutsche
macht, und mach es nach. Und wenn das quasi der Initiator dafür ist, find ich‘s ur cool,
…).“
Besorgtheit sehen die Therapeutinnen, neben dem fehlenden Alltagstransfer, auch in
einem falschen Beziehungsaufbau und einer Fixierung auf den Roboter. Die
Therapeutinnen weisen dabei auf eine zu starke Bindung von Kindern mit Autismus auf
Gegenstände hin (Diskussionsrunde 1+2). Dies könnte herausfordernde Situationen mit
sich bringen (TN4). Bei einer Therapeutin ist der Beziehungsaufbau ein zentrales Thema
(TN5).
TN 5: „ …) ich weiß halt nicht, wie sinnvoll dass es ist, weil wie funktioniert dann der
Transfer? Das Kind baut eine Beziehung zum Roboter auf, aber vielleicht nicht so eine
gute zur Therapeutin und wie funktioniert dann der Transfer von dem erlernten Wissen
mit dem Roboter und dem Umgang dann auf Menschen? …).“
TN 4: „ …) Ja und bei mir kommt auch noch dieser Aspekt hoch, [...] was ist, wenn der
dann fast wichtiger wird als alle anderen? Und die Kinder, und grad Kinder mit dem
autistischen Spektrum, sind ja auch recht gut darin manchmal so Wutanfälle zu schieben
und wenn dann eigentlich die herausfordernden Situationen mehr werden, statt weniger
…).“
Ethische Bedenken werden nur in Bezug auf den Verlust einer Mensch-zu-Mensch
Interaktion in den Diskussionsrunden gesehen (Diskussionsrunde 1+2+TN 5). Bezüglich
der verwendeten Kameras wird in keiner Diskussionsrunde eingegangen. Die Expertin
erklärt zudem, dass ErgotherapeutInnen zurzeit schon mit Videoanalysen arbeiten und
52
heutzutage kaum mehr wegzudenken sind. Jedoch weist sie auf einen gesicherten
Umgang der Daten hin.
Expertin: „ …) es wird alles aufgenommen, dass sind Kinder - das sie Schutzbefohlene
sind. […] Kinder mit Beeinträchtigung was natürlich dann auch nochmal schwieriger ist
[…] sollte man im Hinterkopf behalten und gucken [schauen], wie die Daten halt immer
gesichert sind …).“
In allen Diskussionsrunden wird ein Potential in der Verwendung von NAO festgestellt
(Diskussionsrunde 1+2+TN 5). Es werden jedoch auch Ängste und Missempfindungen
der Therapeutinnen ausgesprochen (Diskussionsrunde 1+2+TN 5). In Diskussionsrunde
1 und 2 wird die Sinnhaftigkeit des Robotereinsatzes diskutiert, da die Aktivitäten, welche
der Roboter durchführen soll, durchaus von einem Menschen durchgeführt werden
könnten.
TN 4: „ …) Ich mein, da ist für mich dann nur die Frage: „Theoretisch kann das ein
Erwachsener, ein Mensch auch …).“
TN 2: „ …) Da kann ich‘s mir vorstellen so bei ADL Tätigkeiten, dass sie die Anleitung
geben, aber da denk ich mir, wenn ich im Einzelsetting bin und der Person könnt ich das
eben genauso machen …).“
TN 1 und 5 beschreiben eine Art Angst, dass der Roboter den Menschen ersetzen könnte
bzw. die Kinder nicht mehr mit dem Menschen interagieren wollen. Man müsste die
Technologien so einsetzen, dass sie letztendlich der Therapeutin bzw. dem Therapeuten
und der Menschheit dienlich sind. Auch die anderen Therapeutinnen und die Expertin
verweisen auf die Wichtigkeit den Menschen im Fokus zu behalten.
TN 1: „ …) aber ich hätt eigentlich Angst, als Mensch sozusagen, dass mich halt der
Roboter irgendwann ersetzen kann oder halt dass die Kinder mehr auf den Roboter
hören als auf mich und ich glaub das wird passieren …).“
Expertin: „Ich hab genau das Problem, dass halt viel zu sehr jetzt auf Roboter und
Technik ist und man ja eigentlich die Interaktion mit dem Menschen lehren m chte …)
man muss halt schauen [gucken], wo man anfängt und wo man aufhört, dass man halt
nicht den Roboter die ganze Therapie machen lässt, sondern dass auch immer noch die
Interaktion mit dem Menschen vordergründig ist.“
53
5. Diskussion
Die vorliegende Arbeit präsentiert erste Ansichten des Robotereinsatzes von NAO in
Österreich. Das Forschungsgebiet der sozial-assistierenden Roboter ist, wie bereits
erwähnt, immer weiter im Wachsen und könnte in der Ergotherapie in Zukunft seinen
Einsatz finden. Darum ist es wichtig ein Wissen über eine mögliche Nutzung zu erhalten.
Nachfolgend werden die Ergebnisse kritisch beleuchtet und mit bestehender Literatur
verglichen. Die Ergebnisse der Interviews korrelieren mit den Ergebnissen der
Literaturrecherche und unterscheiden sich nur im geringen Ausmaß mit einer Studie zur
Implementierung des humanoiden Roboter Kaspar (Huijnen et al., 2017). Auch konnten
Übereinstimmungen in dem Artikel von Ricks und Colton über aktuelle Trends des
Robotereinsatzes gefunden werden. Hier werden die Wichtigkeit der Zielsetzung sowie
der Rolle des Roboters aufgezeigt (Ricks & Colton, 2010).
Nachfolgend erfolgen die Beantwortung der Forschungsfragen sowie die
Implementierung von NAO in den ergotherapeutischen Prozess. Abschließend werden
Implikation für die Forschung gegeben. Auch beinhaltet dieses Kapitel Limitationen dieser
Arbeit.
5.1. Beantwortung der Forschungsfragen
Das folgende Subkapitel beleuchtet noch einmal die einzelnen Forschungsfragen
eingehender. Aufgrund von mangelnden Evidenzen und Erfahrungen kann die
Hauptforschungsfrage zum Einsatz von NAOs in der Ergotherapie in Österreich noch
nicht vollständig beantwortet werden. Auch eine Konzeptentwicklung verzögert sich
dadurch. Eine Empfehlung für die Implementierung in den ergotherapeutischen Prozess
kann bereits abgegeben werden. Dieser Punkt wird in Kapitel 5.2 näher beleuchtet.
Welche Komponenten sollte NAO mitbringen, um einen Einsatz in der Ergotherapie
zu finden?
Die Studie von Kaspar geht detailliert auf das Aussehen des Roboters ein. Die
Stakeholder fordern in dieser eine adäquate Kleidung, ein „cooles“ Aussehen und
gewisse Accessoires des Roboters (2017). Die Expertinnen der vorliegenden Arbeit
sehen diese Faktoren als weniger relevant an. Dadurch könnten Kinder mit Autismus
eventuell weniger Distanzverhalten aufbauen und den Roboter nicht mehr als einen
Roboter wahrnehmen. Wie die Studie von Coeckelbergh et al. ebenfalls zeigt, wird auch
hier der Einsatz von zu menschenähnlichen Robotern kritisch betrachtet. Dies bringt
ethische Bedenken, wie ein möglicherweise zu starker Beziehungsaufbau zu einem
Roboter, mit sich (2016). Aus den Ergebnissen des Scoping Reviews (Ismail et al., 2012;
Shamsuddin et al., 2012a, Tapus et al., 2012) und der Diskussionsrunden sowie des
Expertinneninterviews wird allgemein ersichtlich, dass das Aussehen von NAO für Kinder
mit ASS ansprechend ist.
Welche Evidenzen der Effektivität werden bereits in der Literatur beschrieben?
Nach einer ICF Analyse differenzierter Roboter sind die Hauptziele der Studien über eine
robotergestützte Therapie die Bereiche "Soziale / zwischenmenschliche Interaktionen
und eziehungen", „Kommunikation“ und "Spiel". Andere ereiche wie
2017) heben die Komplexität des Spektrums und der Kinder hervor. Laut den
Expertinnen sollten die Kinder für den Einsatz von NAO bereits ein gewisses Alter
erreicht haben. So ist auch aus den Ergebnissen des Scoping Reviews ersichtlich, dass
vor allem Kinder zwischen 5 - 12 Jahren inkludiert wurden. Bekele et al. (2014) zeigen in
ihrer Studie beispielsweise auf, dass Kinder im Vorschulalter mehr Blickkontakt halten. Es
kann gesagt werden, dass das ideale Alter der Kinder zwischen 5 und 14 Jahren liegen
sollte. Die Expertinnen, sowie die Studie von Huijnen et al. (2017) weisen allerdings
darauf hin, dass das biologische Alter weniger relevant und die kommunikativ-kognitive
Entwicklung ausschlaggebender sei. Kinder benötigen eine gute Kognition und
ausgereifte sprachliche Fähigkeiten. Laut Ismail et al. wären Kinder mit einem mittleren
IQ und Autismusschweregrad am besten geeignet (2012). Sowohl die Expertinnen, als
auch Tapus et al. bestätigen einen möglichen Einsatz, nach angepasster Zielsetzung, bei
Low Functioning Autisten (2012). Es könnte jedoch ein Verlust des Langzeitinteresses
entstehen (Srinivasan, Eigsti, Gifford, et al., 2016). Die Expertinnen glauben ebenfalls,
dass ein Einsatz bei High Functioning Autisten möglich wäre. Der Einsatz bei Asperger
Autisten ist aufgrund von fehlendem Langzeitinteresses nicht wahrscheinlich. Aus den
Ergebnissen des Scoping Reviews, sowie der Diskussionsrunden ist das Interesse der
Kinder für einen Einsatz zentral. Dass dieses Interesse durchaus vorherrscht, wird in den
inkludierten Studien ersichtlich (E. Bekele et al., 2014; Desideri et al., 2017; Shamsuddin
et al., 2012a; Srinivasan, Kaur, et al., 2015; Tapus et al., 2012; Z. E. Warren et al., 2015;
Zheng et al., 2016). Die Ergebnisse in Bezug auf die mögliche Zielgruppe werden auch
durch die Studie von Huijnen et al. bestätigt. Dabei ist zu erkennen, dass Kinder mit
Asperger Autismus oder hohem Wutpotential weniger geeignet sind. Es werden Kinder
mit einem starken Bedürfnis nach Nähe und Aufforderung, mit Schwierigkeiten in der
Kontaktaufnahme oder mit Ängsten vor einer Mensch-zu-Mensch Interaktion, als
potentielle Zielgruppe beschrieben (2017).
5.2.2. Anwendbarkeit
Wie auch die Expertinnen bestätigen, kann NAO sowohl im Einzelsetting, als auch im
Gruppensetting seinen Einsatz finden. Im Gruppenkontext kann er in der Schule oder im
56
Kindergarten eingesetzt werden. Es sollte hierbei auf eine angepasste und leise
Umgebung geachtet werden. Auch spielen diese Faktoren laut Huijnen et al. (2017) eine
wichtige Rolle. Die Therapie sollte immer in Verbindung mit einer Therapeutin bzw. einem
Therapeuten stattfinden und nicht als alleinige Plattform dienen. Die Schaffung eines
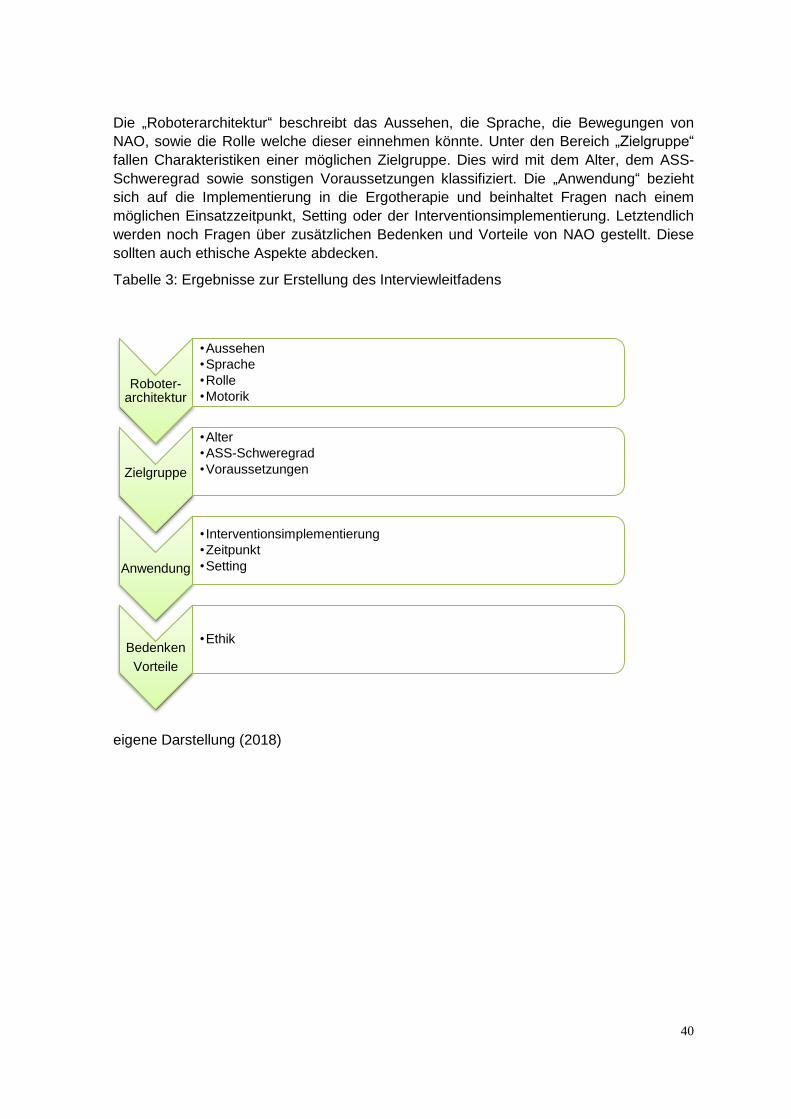
geschützten Rahmens für den Einsatz ist auch hier zentral (Huijnen et al., 2017).
5.2.3. Ziele und Rolle
Laut den Ergotherapeutinnen sollte der Roboter in einer therapeutischen
Interventionsphase gezielt eingesetzt werden. Es ist wichtig, sich vorab über das Ziel im
Klaren zu sein und dieses zu definieren. Da NAO nicht für jedes Ziel geeignet ist, sollte
der Einsatz auf dieses abgestimmt werden. Auch die Studie von Huijnen et al. bestätigt
die Wichtigkeit der Zielsetzung. Diese sollte klar und adäquat beschrieben werden
(Huijnen et al., 2017). Laut Ricks und Colton(2010) und den Therapeutinnen ist es zudem
denkbar in Zukunft für jedes spezielle therapeutische Ziel, einen bestimmten Roboter
einzusetzen. NAO kann nach Ansichten der Therapeutinnen als Ritual, Anleiter oder
Assistent verwendet werden. Auch kann er einen Nutzen, als Motivator bei Stagnation
und Desinteresse bringen.
Eisbrecher/Ritual
NAO könnte als Eisbrecher fungieren, um zu Kindern, welche stark in ihrer eigenen Welt
leben, durchzudringen. Huijnen et al. geben an, dass der Roboter als Ritual ein
geschütztes Setting und einen guten Einstieg in die Therapie vermitteln kann (2017). Vor
allem, da Kinder mit einer Autismus Spektrum Störung auf Veränderungen stark
reagieren und diese eine gute Struktur benötigen, wäre NAO in der Rolle als Ritual zu
empfehlen. So sehen auch die AutorInnen Shamsuddin et al. NAO einen Helfer bei der
Reduktion von Stress und Schwierigkeiten (2012a).
Vermittler/Zwischenelement in der Interaktion
Ein Ziel der Robotertechnologie ist es auch eine Reduktion von Unsicherheit, Ängsten
und des Stresslevel zu ermöglichen (Cardon, 2016). Laut Shamsuddin et al. bietet NAO
ein gutes Tool zur Ermöglichung einer einfacheren (2012) und auch weniger
beängstigenderen Interaktion. Somit könnte dieser als positiver Vermittler agieren. Auch
wird er in den Studien als vermittelndes Medium für Imitationsleistungen oder der Joint
Attention gesehen, wodurch er die Funktion eines Zwischenelementes erhalten würde.
Die Autoren Ricks und Colton empfehlen, dass nicht-humanoide Roboter im
Anfangsstadium bei einer einfachen Interaktion eingesetzt werden sollten. Im Laufe der
Therapie sollte ein Umstieg auf einen humanoiden Roboter stattfinden (2010). Da NAO
zu den humanoiden Robotern zählt, jedoch keine komplexen Gesichtszüge aufweist,
wäre dieser Roboter womöglich über einen längeren Zeitraum, im Anfangsstadium sowie
im weiteren Verlauf, als Übergang und Vorstadium zur tatsächlichen Interaktion
einsetzbar. Durch dieses weniger anspruchsvolle Aussehen ist es möglich, dass NAO
weniger herausfordernde Situationen mit sich bringt. Zugleich kann er aber auch, durch
seine humanoiden Anteile, eine bessere Möglichkeit zum Alltagstransfer aufweisen. Die
Studienresultate von Srinivasan et al. zeigen jedoch auf, dass NAO zurzeit als kein
wirksamer Vermittler der gemeinsamen Aufmerksamkeit eingesetzt werden kann
(Srinivasan, Eigsti, Gifford, et al., 2016; Srinivasan, Eigsti, Neelly, et al., 2016; Srinivasan,
Park, et al., 2015).
57
Vermittler/Zwischenelement von Emotionen
Zur Vermittlung von Emotionen und Gefühlen kann NAO nach Ansichten der Autorin
sowie der Expertinnen nicht eingesetzt werden, da dieser Roboter keine Mimik aufweist,
und das Erkennen von Gesichtszügen bei der Interpretation einen wichtigen Faktor
darstellt. Hierbei wären Roboter wie Zeno oder Kaspar besser geeignet.
Anleiter/Motivator bei ADL Training
Die Nutzung als Anleiter beim ADL Training oder beim Skills Training wäre durchaus
möglich und gut umsetzbar. Sowohl die Expertinnen, als auch die Ergebnisse des
Scoping Reviews zeigen den großen Motivationscharakter NAOs. Laut Expertinnen
könnte der Roboter durch seine Aussprache klare und gezielte Schritt-für-Schritt-
Anleitungen geben, ohne die Kinder, durch eine sich ändernde Stimmlage, zu
verunsichern. Allerdings wird in den Studien von Srinivasan, Eigsti, Gifford, et al. (2016)
und Srinivasan, Park, et al. (2015) auf eine unklare und verzögerte Sprachqualität sowie
limitierte vorprogrammierbare Aussagen hingewiesen, was berücksichtigt werden sollte.
Spielpartner
Bei einem Einsatz als tatsächlicher Spielpartner sind sich die ExpertInnen unsicher. Auch
in der Studie von Coeckelbergh et al. wird ebenfalls eine Sorge im Einsatz NAOs als
Spielpartner gesehen (2016). Diese Besorgtheit könnte auch mit einer Angst eines
Menschenersatzes zusammenhängen. Aufgrund der starken Fixierung auf den Roboter,
den Bedenken hinsichtlich eines Verlustes der Mensch zu Mensch Interaktion ist NAO
nach Ansichten der Autorin deshalb nicht geeignet. Auch in der Spielstudie von Huskens
et al. können keine signifikanten Veränderungen des Spielverhaltens festgestellt werden
(2014).
5.2.4. Implementierung NAOs
Laut Aussagen der Expertinnen kann NAO bei den am häufigsten verwendeten
ergotherapeutischen Maßnahmen in Österreich eingesetzt werden. Dies ist wichtig, da
eine Verbindung mit etablierten Maßnahmen eine Implementierung erleichtern und einen
richtigen Einsatz erzielen kann (Begum et al., 2016). Nachfolgend werden Beispiele für
den möglichen Einsatz NAOs aus Sicht der Autorin in den verschiedenen Bereichen
genannt. In den Tabelle 7 - 10 werden das Ziel, die Intervention, das Setting, die
Maßnahme sowie die erlernte Fertigkeit und die Rolle NAOs dargestellt.
Verhaltenstherapie
Der Einsatz NAOs bei verhaltenstherapeutischen Maßnahmen ist laut den Expertinnen
durchaus möglich. Die Ergebnisse des Reviews können dies allerdings nicht belegen, da
hier sowohl positive (Ismail et al., 2012; Shamsuddin et al., 2012a, Tapus et al., 2012),
als auch negative Verhaltensweisen (Srinivasan et al. 2015) festzustellen sind. Aufgrund
der Tatsache, dass die Verhaltenstherapie ABA nur geringen Anklang in Österreich
findet, kann hierzu keine Empfehlung abgegeben werden.
Interaktionstraining
Aus Sicht der Autorin, der Expertinnen und den Ergebnissen des Scoping Reviews kann
ein Einsatz von NAO als Interaktionstraining noch nicht stattfinden. Zur Förderung einer
Interaktion spielen die Joint Attention, sowie eine Imitation eine wichtige Rolle. Aus dem
Scoping Review werden zwar einige positive Ergebnisse (E. Bekele et al., 2014; Z.
Warren et al. 2015; Z. E. Warren et al., 2015) in Bezug auf die Joint Attention ersichtlich,
58
jedoch konnten nicht alle Studien ausschlaggebende Verbesserungen feststellen
(Srinivasan, Eigsti, Neelly, et al., 2016; Tapus et al., 2012). Eine Imitationsverbesserung
wird in mehreren Studien aufgezeigt (Srinivasan, Kaur, et al., 2015; Tapus et al., 2012; Z.
Warren et al., 2015; Zheng et al., 2016). Die Expertinnen sehen NAO allerdings, aufgrund
des fehlenden Alltagstransfers und der mangelnden Interaktion mit den Kindern, noch
nicht als einsatzfähig an.
Skills Training
Aus Sicht der Therapeutinnen kann ein Einsatz in Methoden, wie dem Skills Training, in
welchem NAO Anweisungen geben sollte, stattfinden. Auch aus der Analyse des Scoping
Reviews ist ersichtlich, dass in dieser Richtung durchaus Potential vorherrscht. Die
Kinder konnten Anweisungen von NAO folgen und auch eine Motivationssteigerung,
welche beim Skills Training relevant ist, wurde erzielt. So weist auch eine
Ergotherapeutin darauf hin, dass Kinder Anweisungen von einem Roboter
möglicherweise lieber folgen würden. Beim Einsatz könnte NAO somit Anweisungen
geben oder die Aktivität vorführen und das Kind sollte anschließend in der Lage sein,
dies zu imitieren. Da die Ergebnisse des Scoping Reviews ebenfalls positive Ergebnisse
einer Imititationsvermittlung (Srinivasan, Kaur, et al., 2015; Tapus et al., 2012; Z. Warren
et al., 2015; Zheng et al., 2016) aufzeigen, kann die Möglichkeit eines Einsatzes
untermauert werden. Im Bereich der Grobmotorik, die ebenfalls beim Skillstraining eine
Rolle spielt, konnte in der Studie von Srinivasan et al. (2015) positive Ergebnisse
aufgezeigt werden, wodurch ein Training von ADL Leistungen möglich wäre. NAOs
Bewegungsrepertoire, sowie seine Verhaltensweisen sollten jedoch für einen
tatsächlichen Einsatz ausgebaut werden.
Tabelle 7: Anwendungsbeispiel Skills Training
eigene Darstellung (2018)
PECs, TEEACH und MarteMeo
Auch zur Verbesserung der Kommunikation kann laut den Therapeutinnen NAO in
Verbindung mit dem PECs Konzept oder dem TEEACH Konzept eingesetzt werden.
Obwohl Studien über eine Verbesserung der Kommunikation keine übereinstimmenden
positiven Aussagen treffen, kann davon ausgegangen werden, dass NAO genauso
effektiv wie ein Mensch ist. Bei der MarteMeo Methode könnte NAO ebenfalls eingesetzt
werden, um dem Kind sprachliche Rückmeldung über die durchgeführte Aktivität zu
Ziel Kind X. kann sich bei der Aufforderung Schuhe anziehen unter einer
Schritt für Schritt Anleitung von NAO selbstständig die Schuhe
binden.
Intervention NAO gibt eine Schritt für Schritt Anweisung und Feedback über die
Aktivität
Rolle Anleiter/Motivator
Setting Einzelsetting/Gruppensetting
Konzept/Idee Skills Training
Fertigkeit Schuhe anziehen
59
geben. Bei allen Maßnahmen sollten jedoch die sprachlichen Einschränkungen, welche
in den Studien von Srinivasan et al. ersichtlich wurden, beachtet werden. Sie
beschreibend die Sprache als verzögert und limitiert (Srinivasan, Eigsti, Gifford, et al.,
2016; Srinivasan, Park, et al., 2015). Da NAO sofort Feedback vermitteln sollte, ist diese
Komponente jedoch vor allem beim MarteMeo Konzept entscheidend.
Tabelle 8: Anwendungsbeispiel TEEACH
eigene Darstellung (2018)
Tabelle 9: Anwendungsbeispiel Marte Meo
eigene Darstellung (2018)
Motoriktraining
NAO könnte auch zur Verbesserung der Fein- und Grobmotorik eingesetzt werden. So
bestätigen auch die Ergebnisse von Tapus et al. (2012), dass Kinder besser die
Bewegungen des Roboters nachahmen können. Auch da die Expertinnen das Verhalten
und die Bewegungen des Roboters als menschenähnlich und geeignet einstufen, wäre
dies vorstellar. Zahlreiche Studien fordern allerdings eine Verbesserung des
Bewegungsrepertoires von NAO (E. Bekele et al., 2014; Srinivasan, Eigsti, Neelly, et al.,
2016; Tapus et al., 2012; Z. E. Warren et al., 2015; Zheng et al., 2016).
Tabelle 10: Anwendungsbeispiel Motoriktraining
Ziel Kind X. kann grobmotorische Aufgaben des BOT Tests ausführen
Intervention NAO führt eine Grobmotorische Aktivität durch und motiviert das
Kind diese nachzumachen
Rolle Anleiter/Motivator
Ziel Kinder sollen mit NAO den Plan am TEEACH Brett korrekt
aufkleben.
Intervention NAO gibt Anleitungen und hilft beim Aufkleben der Patches
Rolle CO-Therapeut/Assistent, Ritual
Setting Gruppensetting
Konzept/Idee TEEACH
Fertigkeit Strukturierung des Tagesablaufes
Ziel Kind X. ergreift bei einem Spiel Eigeninitiative und NAO kann dieses
benennen.
Intervention NAO nimmt die Tätigkeiten des Kindes wahr und gibt eine
Rückmeldung über die durchgeführte Tätigkeit.
Rolle Anleiter
Setting Einzelsetting
Konzept/Idee MarteMeo
Fertigkeit Förderung des Spielverhaltens/Eigeninitiative
60
Setting Einzelsetting
Konzept/Idee Motoriktraining
Fertigkeit Förderung der Grobmotorik
eigene Darstellung (2018)
5.2.5. Einsatzzeitpunkt im ergotherapeutischen Prozess
Nachfolgend wird der ergotherapeutische Prozess zur Eingliederung NAOS aus Sicht der
Autorin dargestellt und eine Empfehlung über den Einsatz gegeben. Die Empfehlungen
der ExpertInnen sowie die Studie von Huijnen et al. (2017) belegen, dass der Wahl des
Einsatzzeitpunktes besondere Beachtung geschenkt werden sollte. In Abbildung 15 wird
der ergotherapeutische Prozess dargestellt und der Einsatz NAOs dargestellt.
Nachfolgend werden die einzelnen Phasen kurz beschrieben.
eigene Darstellung (2018)
Befunderhebung
Wie schon in der Einleitung erwähnt, ist es wichtig eine konkrete Analyse des Kindes
durchzuführen. Die erste Therapiephase bzw. der Erstkontakt mit dem autistischen Kind
sollte ohne NAO erfolgen. Es ist wichtig, vorab eine gute menschliche Beziehung zu dem
Kind aufzubauen, das Individuum kennenzulernen und die Interessen des Kindes zu
ermitteln. In der Einstiegsphase ist zu beachten, wie Kinder in ihrem Alltag mit
technischen Produkten umgehen, ob Ängste vorherrschen oder Wutanfälle häufig
auftreten. Anschließend sollte nach dem ergotherapeutischen Prozess die Zielsetzung
Befunderhebung
ohne NAO
Ermöglichung eines ersten Beziehungsaufbaus
Zielfindung: Was soll gelehrt werden?
Therapieverlauf
Einsatz NAO als Medium
-Implementierung in eine Methode
- als Morgenritual
- bei Stagnation
-Desinteresse der Standardtherapie
-ADL Training
-Vermittlung von sensorischen Reizen
- Strukturierung des Tages
Evaluierung
Therapieerfolg
Abbildung 13: Therapeutischer Prozess
61
mit dem Kind und den Eltern erfolgen. Hier spielt auch die Akzeptanz der Eltern über die
Therapie mit einem Roboter eine entscheidende Rolle.
Therapieverlauf
Nun sollte eine Überlegung über eine geeignete Interventionsmethode stattfinden. In
dieser Phase kann die Therapeutin bzw. der Therapeut entscheiden, welche Methode
verwendet wird und ob NAO in diese implementiert werden könnte. Je nach Ziel sollte die
Sinnhaftigkeit und die Rolle des Roboters reflektiert werden. Die anschließende
Implementierung sollte langsam und schrittweise erfolgen. Außerdem sollten ethische
Gesichtspunkte, wie der Datenschutz, beachtet werden.
Evaluierung der Ziele
Hierbei sollte laut ergotherapeutischen Prozess der Transfer in den Alltag im Mittelpunkt
stehen. Ist dieser nämlich nicht gegeben, kann von keiner erfolgreichen Therapie
gesprochen werden (Haase, 2007). Somit stellt der Faktor des Alltagstransfers den
entscheidenden Punkt für die Implementierung dar. Laut den Studien der University of
Deleware ist dieser Alltagstransfer, jedoch noch nicht gegeben (Srinivasan, Eigsti,
Gifford, et al., 2016; Srinivasan, Eigsti, Neelly, et al., 2016; Srinivasan, Park, et al., 2015),
wodurch eine Empfehlung über den Einsatz noch nicht ausgesprochen werden kann.
5.2.6. Hinweise zur Nutzung von NAO
Für die Nutzung von NAO ist es wichtig einige Aspekte kritisch zu reflektieren und im
Hinterkopf zu behalten.
- Der Mensch steht im Mittelpunkt; kein Ersatz einer Mensch-Mensch-Interaktion
- gezielter und limitierter Einsatz; Gefahr einer möglichen starken Fixierung der
Kinder auf NAO
- Ethische Richtlinien und Akzeptanz
Laut Ergotherapeutinnen ist der wichtigste zu beachtende Punkt, und auch der in der
Ergotherapie relevanteste Aspekt, der Mensch. Durch die Robotertechnologie darf es zu
keinem Verlust der Mensch-zu-Mensch-Interaktion kommen. Die Partizipation im
alltäglichen Leben steht laut ergotherapeutischer Ansicht im Mittelpunkt. Man sollte
beachten, dass das Kind das Interesse an einer Interaktion mit dem Menschen nicht
verliert und keine zu starke Fixierung auf NAO stattfindet. Er sollte als eine Art Medium
fungieren und in die Therapiephase wie ein Tool integriert werden. Der Roboter sollte nur
in Maßen eingesetzt werden, da sich Kinder auch stark auf technische Dinge fokussieren
und somit eine Lösung der Aufmerksamkeit Schwierigkeiten mit sich bringen könnte.
Auch konnte in allen Studien der AutorInnen Srinivasan et al. diese starke Fixierung der
Kinder auf den Roboter festgestellt werden, wodurch dieser Aspekt bei einem Einsatz von
NAO stark zu bedenken ist. Die Angst des Ersatzes einer Mensch-zu-Mensch Interaktion
ist auch in der Studie von Coeckelbergh et al. (2016) ein Thema. Wie auch die
Interviewten hinweisen, ist zu beachten, dass diese starke Bindung bei Verlust des
Roboters eine Art Distress Reaktion verursachen könnte (Coeckelbergh et al., 2016).
Auch aufgrund der Tatsache dass, Kinder keine Veränderungen mögen, ist es wichtig
NAO nicht als alleinige Interventionsmaßnahme zu setzen. Es ist ein Einsatz als Medium
und nicht als Behandlungskonzept zu empfehlen. Weiters sollte die Intervention mit NAO
unter Aufsicht einer Therapeutin oder eines Therapeuten stattfinden, dies bestätigt auch
die Studie hinsichtlich ethischer Aspekte von Coeckelbergh in der 44% der TN angeben,
dass die Therapie von einer Therapeutin bzw. einem Therapeuten überwacht werden
62
sollte (2016). Obwohl die Akzeptanz soziale Roboter in der Therapie einzusetzen sehr
hoch ist, muss auf einige Aspekte hingewiesen werden. Die Aufzeichnung und
Speicherung der Daten beinhaltet laut Expertinnen nur wenig Bedenken, was auch die
Studie von Coeckelbergh belegt. In dieser geben 78% der Befragten an, dass es ethisch
vertretbar ist, die Daten zu speichern und aufzuzeichnen. Es ist allerdings eine Sicherung
der Daten nach den Kriterien des Datenschutzes und den ethischen Richtlinien
unabkömmlich und stellt eine enorme Wichtigkeit dar.
5.3. Implikationen für die Forschung
NAO kann zur Zeit noch nicht als Tool eingesetzt werden und benötigt noch an
Weiterentwicklung, sowohl auf technischer, als auch auf anwenderInnenbezogener
Ebene. Für weitere Forschung ist es wichtig sich über die gewünschten Ziele der
Roboterinteraktion im Klaren zu sein. Auch auf eine einheitliche Zielgruppe sollte großer
Wert gelegt werden. Des Weiteren wird eine Forderung nach größeren Studien durch die
Literaturrecherche ersichtlich. Begum et al. entwickelten für die Erstellung von Studien
hinsichtlich eines Robotereinsatzes eine eigene Richtlinie (2016).
Forschung sollte vor allem im Hinblick auf die Generalisierung im Alltag stattfinden. Da
bezogen auf einen Alltagstransfer noch keine Evidenzen vorliegen, wäre dies als weiterer
Schritt und für eine Implementierung relevant. Die geringe Generalisierbarkeit wird auch
durch die Literaturrecherche ersichtlich, da die meisten Studien rein in einem
experimentellen Setting durchgeführt worden sind. Durch die rapide technische
Weiterentwicklung und den Forschungsdrang im ereich der „Socially Assistive Robots“
könnte dies jedoch schon bald in der Praxis außerhalb des experimentellen Settings
stattfinden. Ricks und Colton weisen darauf hin, dass die Verwendung eines humanoiden
Roboters eine gute Voraussetzung für einen zukünftigen Transfer darstellen könnte
(Ricks & Colton, 2010). Um einen Alltagstansfer zu ermöglichen und eine Fixierung rein
auf den Roboter zu verhindern, sollte nach Ricks und Colton auf eine triadische
Interaktion besonderen Wert gelegt werden. Das Ziel besteht darin die Interaktionen
zwischen einem Kind mit ASS und mit anderen Menschen zu verbessern. Eine triadische
Beziehung sollte sich aus dem Kind, dem Roboter und einer dritten Person
zusammensetzen. Wie auch von den Expertinnen dieser Studie gefordert, sollte der
Roboter als eine Art Zwischenelement oder Drehpunkt dienen, um eine Interaktion
auszulösen (Ricks & Colton, 2010). Des Weiteren sollten Langzeitstudien und Studien
außerhalb des klinischen Settings durchgeführt werden. Dabei sollten wieder die Fragen
nach dem Alltagstransfer und der Übertragung auf andere Personen ein essentielles
Thema darstellen.
Aufgrund der Tatsache das SAR ein interdisziplinäres Forschungsgebiet ist (Scassellati
et al., 2012), sollten ebenfalls SpezialistInnen der Ergotherapie an der Entwicklung von
Szenarien für den Einsatz NAOs mitwirken. Auch durch ihr Wissen über unterschiedliche
Konzepte kann der Einsatz von NAO gezielter stattfinden und die Forschung in eine
entscheidende Richtung lenken. Es wäre eine Analyse in einem Interventionssetting zu
empfehlen, wodurch gezieltere Aussagen getroffen und der Einsatz von NAO besser
reflektiert werden könnte. Weitere Forschung wäre auch in Bezug auf
Interventionsstudien nötig. Es sollten Szenarien entwickelt werden, in denen NAO bereits
in eine bestehende Methode implementiert wird. Die Forschungsschwerpunkte sollten
dabei auf die Bereiche des Kapitels 5.2.4 gelegt werden.
63
Beispielsweise wären ein Einsatz in der MarteMeo Methode oder im Skillstraining
vielversprechend. Im MarteMeo Konzept könnte NAO als Verstärker wirken und die
Tätigkeiten des Kindes benennen. Dafür benötigt es bessere sprachliche Äußerungen
NAOs. Im Skillstraining sollte NAO bei Alltagsaktivitäten wie Schuhe anziehen oder Tisch
decken eingesetzt werden. Das Ziel sollte sein, dass NAO richtige Anweisungen vorführt
und die Kinder motiviert, den Anweisungen richtig zu folgen. Hierbei ist wieder die
Wichtigkeit des Alltagstransfers zu nennen. Es soll versucht werden, dass NAO Schritt für
Schritt weniger benötigt wird. Letztendlich sollte die Möglichkeit bestehen, dass das Kind
nur unter der Aufforderung „Schuhe anziehen“ die richtigen Schritte kennt und umsetzten
kann.
Auf technischer Seite sollte NAO vor allem komplexere Körperbewegung imitieren
können. Auch sollte NAO auf sprachlicher Ebene weiterentwickelt werden, um
schnelleres Feedback liefern zu können Außerdem besteht die Aufforderung, dass NAO
mehr Interaktion zeigen und mit Kindern besser in Kontakt treten sollte. Der Roboter
sollte in Zukunft so entwickelt werden, dass er Verhaltensweisen und Bewegungen des
Kindes erkennen, benennen und bestätigen kann. Somit würde er, als eine Erleichterung
für die TherapeutInnen im Marte Meo Konzept eingesetzt werden können. Eine
Entwicklung NAOs in eine vollkommene autonome Richtung sollte jedoch, in späterer
Forschung, nicht angestrebt werden. Es ist wichtig, dass die Therapeutin oder der
Therapeut die Sitzungen überwacht und NAO kontrollieren kann.
5.4. Limitationen der Arbeit
Limitationen sind sowohl auf Seiten der Literaturrecherche, als auch der qualitativen
Erhebung zu erkennen. Nachfolgend werden die zu beachtenden Einschränkungen
dieser Arbeit aufgezeigt. Die Studie wurde nach den Kriterien der Forschungsethik sowie
nach den Richtlinien der Fachhochschule Campus Wien durchgeführt, jedoch kann es
aufgrund mangelnder Erfahrung der Autorin in der Durchführung der Diskussionsrunden,
sowie Interviews zu Limitationen kommen. Die Reflexibilität dieser Studie ist in dem Sinne
eingeschränkt, da die Autorin ohne einer Zweitautorin bzw. einem Zweitautor die
Ergebnisse klassifiziert und interpretiert hat, was eine subjektive und weniger objektive
Aussage der Autorin begünstigte.
5.4.1. Limitationen des Scoping Review
Limitationen dieser Arbeit sind in der Datensammlung des Scoping Reviews zu nennen.
Der Review Prozess stellt dabei an sich eine Einschränkung dar. Vor allem durch den
knappen Zeitraum der Studiensuche und –auswahl konnten die Recherche, sowie die
Analyse möglicherweise nicht präzise genug durchgeführt werden. Weiters erfolgte die
Studienauswahl von der Autorin subjektiv und nach individuellem Ermäßen ohne eine
Zweitautorin oder einen Zweitautor. Eine vollständige Objektivität und Reliabilität der
Ergebnisse kann somit nicht garantiert werden. Um dennoch Gewissheit und Objektivität
zu gewährleisten erfolgte die Analyse bei Verständnisfragen und Unsicherheiten in
Einbezug einer externen Person. Ein kompletter Peer-Review Prozess wurde allerdings
nicht durchgeführt. Auch in der Studienauswahl sind Einschränkungen aufgrund der
Studienqualität und der Anzahl an relevanten Quellen zu nennen. Obwohl 14 Studien
inkludiert wurden, sind nur sechs ForscherInnengruppen zu nennen, was letztendlich die
Ergebnisse bedingt aussagekräftigt macht. Aufgrund der unterschiedlichen
Studiensettings, Zielsetzungen und der Individualität des Spektrums können nur geringe
64
Zusammenhänge und Schlussfolgerungen gezogen werden. Jede Studie setzte
differenzierte Zielsetzungen und Assessments ein, wodurch die Ergebnisse nur schwer
miteinander verglichen werden konnten. Die Autorin versuchte so gut es möglich war, die
Ergebnisse zusammenzufügen und darzustellen. Somit sind die Aussagen subjektiv den
einzelnen Kategorien zugeordnet. Dies stellt jedoch für den Forschungsbezug kein
großes Hindernis dar, weil das Hauptaugenwerk der Autorin auf der Durchführung der
Diskussionsrunden lag. Das Review diente einzig und alleine zur intensiveren
Auseinandersetzung mit dem Thema, zum Einbezug der in der Literatur genannten
Fakten und zur Erstellung detaillierter Interviewleitfäden zu NAO.
5.4.2. Qualitative Forschung
Auch auf Ebene der qualitativen Forschung sind Limitationen bei den Teilnehmerinnen an
sich und den Diskussionsrunden inkl. der Videos zu finden. Schon die Rekrutierung der
Ergotherapeutinnen stellte sich als eine Schwierigkeit heraus. Es wurde mithilfe der
Gelegenheitsstichprobe und des Schneeballprinzips StudienteilnehmerInnen gesucht.
Die primären Personen wurden demnach aus dem nächsten Umfeld der Autorin gewählt,
wodurch eine Verzerrung hinsichtlich positiver Faktoren möglich ist. Um dennoch
nachvollziehbar vorzugehen, wurden alle Therapiezentren, welche auf der Ergotherapie
Austria Seite zu finden waren kontaktiert. Möglicherweise konnten dadurch allerdings
nicht alle Therapiezentren aus Wien und NÖ erreicht werden. Es wurden die
Therapiezentren außerdem gebeten, die Anfrage an mögliche interessierte TN
weiterzuleiten. Ein weiterer Nachteil ist darin zu sehen, dass die Therapeutinnen
aufgrund der freiwilligen Teilnahme an dieser Arbeit möglichweise schon positiver dem
Thema gegenüber eingestellt waren. Folglich wurden keine Ansichten von
TechnikgegnerInnen evaluiert. Obwohl viele Therapiezentren Interesse zeigten und
positive Rückmeldungen über das Thema kundmachten, war die letztendliche
Bereitschaft der Institute nur mangelhaft gegeben. Dies könnte aufgrund von
Unsicherheiten, Ängsten oder fehlender Erfahrung der TherapeutInnen resultieren. Die
Absage der Therapiezentren wurde mit mangelnder zeitlicher Ressource und fehlendem
Interesse der TherapeutInnen argumentiert. Ein Therapiezentrum musste kurzfristig
absagen, wodurch statt einer Diskussionsrunde ein Einzelinterview durchgeführt wurde.
Dies ist in der Hinsicht als Limitation zu nennen, da somit keine eigentliche Diskussion
zustande kommen konnte. Die Teilnehmerin konnte nur auf ihre eigene Vorstellungskraft
zurückgreifen, was es ihr erschwerte andere Ansichten und Überlegungen zu reflektieren.
Insgesamt wurden nur zwei Diskussionsrunden und ein Interview abgehalten, wodurch
die Daten nur eine geringe Aussagekraft liefern und keine vollständige Sättigung erreicht
wurde. Aufgrund der unterschiedlichen Arbeitsweise der ErgotherapeutInnen wäre eine
größere Anzahl an TherapeutInnen sinnvoll gewesen, um eine breitere Datendichte zu
erhalten. Obwohl sich die Aussagen gut ergänzten, wären ErgotherapeutInnen im Setting
Schule oder mit facheinschlägiger SI Erfahrung noch interessante InterviewpartnerInnen
gewesen. Die Tatsache, dass nur Frauen an dem Forschungsprozess teilnahmen, wurde
nach Überlegungen der Autorin als irrelevant empfunden. Die Diskussionsrunden
bestanden aus lediglich zwei Ergotherapeutinnen je Runde. Rückblickend wurde dies als
zu gering gewählt, da durch die starke Zusammenarbeit der Therapeutinnen keine neuen
Aspekte aufgezeigt und keine eigentliche Diskussion zustande kommen konnte. Aufgrund
der mangelnden Erfahrungen der Ergotherapeutinnen über Roboter und dessen
Möglichkeiten konnte keine konkrete Konzepterstellung entwickelt werden. Weiters
wurde, anstelle eines geplanten ExpertInneninterviews mit einem Mitgliedes des
65
Projektes DREAM, ein Interview mit einer Ergotherapeutin mit Erfahrung im Bereich
Autismus und Robotik durchgeführt. Da die Expertin jedoch keine Erfahrung mit NAO
hatte, sondern lediglich mit dem Roboter Zeno, konnten die Ergebnisse nicht vollkommen
umgemünzt werden. Allerdings konnten neue Aspekte aufgeworfen und Ergebnisse der
Diskussionsrunden bestätigt werden.
Die Diskussionsrunden wurden sehr einheitlich abgehalten und die Aussagen der
Therapeutinnen der einzelnen Runden waren ergänzend. Die semistrukturierte
Interviewform brachte viele Vorteile mit, da es viele Zwischenfragen gab und trotz der
Vorgaben auf keine Aspekte vergessen wurde. Auch das Notizbuch wurde nach
Rückmeldungen der Therapeutinnen, als sehr hilfreich empfunden. Dadurch konnten sie
sich notwendige Fragen und Ansichten notieren. Es hätte jedoch an mehreren
Testversuchen gebraucht um die Fragen noch spezifischer zu gestalten. Im
Interviewverlauf sind Limitationen bzgl. der Videos von NAO zu nennen. Da diese Videos
sehr Pro-Robotik sind und keine negativen Aspekte aufweisen, wurden die
Therapeutinnen möglicherweise in eine positive Richtung beeinflusst. Außerdem wurden
die Videos in englischer Sprache gezeigt, wodurch es bei mangelnden
Englischkenntnissen zu Verständnisproblemen und Unaufmerksamkeit der
Therapeutinnen kommen könnte. Auch wurde NAO nicht in Realität den Interviewten
vorgeführt, wodurch diese viel Vorstellungskraft und Offenheit mitbringen mussten. Dies
wurde auch von den Teilnehmerinnen, als schwierig reflektiert. In Zukunft sollte daher
NAO inklusive seiner Fähigkeiten in einer realen Situation vorgeführt werden. Vor allem
da die Videos zu geringe Informationen über NAO, dessen Steuerung und das Verhalten
zu den Kindern zeigten. Durch den Interviewleitfaden und die PowerPoint Präsentation
wurden alle relevanten Faktoren gut dargelegt, jedoch konnten spezifischen Fragen zu
NAOs Architektur und der Autonomie des Roboters nur oberflächlich beantwortet werden.
Dies ist auf ein unzureichendes Wissen der Autorin und den fehlenden technischen
Erfahrungen zu NAO und dem Gebiet der Robotik zurückzuführen.
Externe Validität
In Bezug auf die externe Validität und Generalisierung auf andere Länder kann keine
Garantie vermittelt werden, da nur ErgotherapeutInnen aus Wien und NÖ inkludiert
wurden. In anderen Gebieten Österreichs könnte die Offenheit und Akzeptanz der
Robotertechnologie eingeschränkt sein und mehr Hindernisse und Bedenken aufwerfen.
Durch den Vergleich und den ähnlichen Ergebnissen dieser Arbeit mit der Studie der
AutorInnen Huijnen et al. (2017) können allerdings auch Rückschlüsse auf den positiven
Einsatz in anderen Ländern gezogen werden. Auch waren die InterviewpartnerInnen
insgesamt sehr jung, wodurch bei einer älteren Generation andere Ergebnisse zu Stande
kommen könnten. Da NAO erst in Zukunft seinen Einsatz finden wird, ist dies als weniger
limitierend anzusehen.
66
6. Conclusio
Mit dieser Arbeit soll eine gewisse Sensibilisierung für den Einsatz der
Robotertechnologie stattfinden. Bis dato ist eine Therapie mit Robotern nur in speziellen
Projekten implementiert und steckt bis lang noch in den Kinderschuhen. Auch durch die
Neuartigkeit dieses Therapietools ist es schwierig ein ausgereiftes Konzept zu erstellen.
Aus diesen Gründen konnte auch die Forschungsfrage nicht ausreichend beantwortet
werden. Bestätigt werden kann jedoch, dass in der robotergestützten Therapie durchaus
Potential steckt. Es bedarf jedoch noch an weiterer Forschung, um von generell
signifikant positiven Aussagen sprechen zu können. Obwohl NAO einen hohen
Motivationscharakter aufweist und ein ansprechendes Tool für Kinder darstellt, fehlt es
noch an Studien über eine Generalisierung der erlernten Fähigkeiten in den Alltag. Es
wird erst ein Nutzen in NAO gesehen, wenn die zentrale Frage nach dem Alltagstransfer
geklärt ist.
Hinsichtlich einer Implementierung in die Ergotherapie sollte NAO nicht als alleiniges
Konzept gesehen, sondern viel mehr als Medium in eine Intervention eingesetzt werden.
Es gibt zentrale Punkte, die dabei zu beachten sind. Das Individuum und dessen
Bedürfnisse sollten immer vordergründig sein. Auch die Zielsetzung spielt eine
entscheidende Rolle und die Auswahl der geeigneten Therapiemaßnahme sollte
sorgfältig geplant werden. NAO könnte in der Therapie verschiedene Rollen
beispielsweise als Motivator, Verstärker oder Zwischenelement einnehmen. Potentielle
Einsatzgebiete sind das Skillstraining, Training der Joint Attention und der Imitation nach
dem ABA Prinzip. Zur Interpretation von Gefühlen und der Mimik stellt NAO jedoch keine
geeignete Therapieplattform dar. Hervorzuheben ist bei der Nutzung die Wichtigkeit der
therapeutischen Begleitung und der klientInnenzentrierten Arbeitsweise, welche in der
Ergotherapie vorranging sind. Die Ergotherapie setzt den Mensch in den Fokus und dies
sollte auch beim Einsatz von NAO nicht aus den Augen verloren werden. Bedenken
hinsichtlich einer Therapie mit dem Roboter sind die zu starke Bindung der Kinder an
diesen. Der Roboter NAO ist architektonisch gut gewählt. Jedoch sollten das
Bewegungsrepertoire und das Verhalten von NAO noch vielfältiger werden.
Um ein abschließendes Konzept für die Implementierung des Robotersystems NAO zu
erstellen, benötigt es noch weiterer Forschung. Vor allem der Transfer in den Alltag sollte
in Zukunft im Hauptaugenmerk der Forschung stehen. Als weitere
Forschungsschwerpunkte sollten die triadische Interaktion und Langzeitstudien gesehen
werden.
Zusammenfassend kann gesagt werden, dass eine Therapieintervention mit einem
Roboter sowohl Vor- als auch Nachteile mit sich bringt. Nichts desto trotz besteht großes
Potential und Interesse in der Robotertechnologie und möglicherweise wird diese Art des
Therapietools auch in Zukunft seinen Einsatz in Österreich finden.
67
Literaturverzeichnis
Aldebaran, S. R. (2017). Ask Nao | New Way of Teaching? Retrieved October 21, 2017, from https://asknao.aldebaran.com/
Arksey, H., O’Malley, L. (2005). Scoping studies: towards a methodological framework. International Journal of Social Research Methodology (Vol. 8).
Begum, M., Serna, R. W., & Yanco, H. A. (2016). Are Robots Ready to Deliver Autism Interventions? A Comprehensive Review. International Journal of Social Robotics, 8(2), 157–181. http://doi.org/10.1007/s12369-016-0346-y
Bekele, E., Crittendon, J. A., Swanson, A., Sarkar, N., & Warren, Z. E. (2014). Pilot clinical application of an adaptive robotic system for young children with autism. Autism : The International Journal of Research and Practice, 18(5), 598–608. http://doi.org/10.1177/1362361313479454
Bekele, E. T., Lahiri, U., Swanson, A. R., Crittendon, J. A., Warren, Z. E., & Sarkar, N. (2013). A step towards developing adaptive robot-mediated intervention architecture (ARIA) for children with autism. IEEE Transactions on Neural Systems and Rehabilitation Engineering : A Publication of the IEEE Engineering in Medicine and Biology Society, 21(2), 289–99. http://doi.org/10.1109/TNSRE.2012.2230188
Braun, V., & Clarke, V. (2006). Using thematic analysis in psychology. Qualitative Research in Psychology, 3(2), 77–101270. http://doi.org/10.1191/1478088706qp063oa
raun, V., Clarke, V. What can “‘thematic analysis’” offer health and wellbeing researchers?, 3International Journal of Qualitative Studies on Health and Well-being (2014). American Psychological Association. Sociology Press. http://doi.org/10.3402/qhw.v9.26152
Breazeal, C., Takanishi, A., & Kobayashi, T. (2010). Social Robots that Interact with People. In B. Siciliano & O. Khatib (Eds.), Springer Handbook of Robotics.
Cardon, T. A. (2016). A Look Forward. In Technology and the Treatment of Children with Autism Spectrum Disorder (p. 160). Springer International. http://doi.org/10.1007/978-3-319-20872-5
Case-Smith, J., & Tomchek, S. D. (2009). Occupational Therapy Practice Guidelines for Children and Adolescents with Autism. American Occupational Therapy Association.
Coeckelbergh, M., Pop, C., Simut, R., Peca, A., Pintea, S., David, D., & Vanderborght, B. (2016). A Survey of Expectations About the Role of Robots in Robot-Assisted Therapy for Children with ASD: Ethical Acceptability, Trust, Sociability, Appearance, and Attachment. Science and Engineering Ethics, 22(1), 47–65. http://doi.org/10.1007/s11948-015-9649-x
Dachverband Österreichische Autistenhilfe. (2017). ABA. Retrieved March 3, 2018, from https://www.autistenhilfe.at/leistungen/therapie/aba/
DE-ENIGMA. (2018). Project overview – DE-ENIGMA. Retrieved May 27, 2018, from http://de-enigma.eu/features/
Desideri, L., Negrini, M., Cutrone, M. C., Rouame, A., Malavasi, M., Hoogerwerf, E.-J., … Di Sarro, R. (2017). Exploring the Use of a Humanoid Robot to Engage Children with Autism Spectrum Disorder (ASD). Studies in Health Technology and Informatics, 242, 501–509. Retrieved from http://www.ncbi.nlm.nih.gov/pubmed/28873845
Diehl, J. J., Crowell, C. R., Villano, M., Wier, K., Tang, K., & Riek, L. D. (2014). Clinical Applications of Robots in Autism Spectrum Disorder Diagnosis and Treatment. In V. B. Patel, V. R. Preedy, & M. R. Colin (Eds.), Comprehensive Guide to Autism (p. 411). Springer Reference.
68
Diehl, J. J., Schmitt, L. M., Villano, M., & Crowell, C. R. (2011). The Clinical Use of Robots for Individuals with Autism Spectrum Disorder: A Critical Review. Research Autism Spectrum Disorder, 6(1), 249–262. http://doi.org/10.1016/j.rasd.2011.05.006.The
DREAM. (2017). DREAM project | thedreamproject.eu. Retrieved October 21, 2017, from http://www.dream2020.eu/
Ergotherapie Austria – Bundesverband der Ergotherapeutinnen und Ergotherapeuten Österreichs. (2017). TherapeutInnen-Suche | Ergotherapie Austria. Retrieved March 2, 2018, from https://www.ergotherapie.at/therapeutinnen-suche
Feil-Seifer, D., Matarić, M. J. (2005). Defining Socially Assistive Robotics. In 9th International Conference on Rehabilitation Robotics, 2005. ICORR 2005. (pp. 465–468). IEEE. http://doi.org/10.1109/ICORR.2005.1501143
Gläser, J., & Laudel, G. (2010). Experteninterviews und qualitative Inhaltsanalyse - als Instrumente rekonstruierender Untersuchungen. Wiesbaden: VS Verlag für Sozialwissenschaften. (Vol. 2., durchg). http://doi.org/LBS IV 912
Haase, F. C. (200 ). Phasen des Therapieprozesses. In C. Scheepers C. erting-Hüneke (Eds.), Ergotherapie : vom ehandeln zum Handeln : Lehrbuch für die theoretische und praktische Ausbildung (pp. 189–196). Thieme. Retrieved from https://books.google.at/books/about/Ergotherapie.html?id=zBk4uheqdW0C&redir_esc=y
Handicapkids. (2018). www.handicapkids.at. Retrieved March 5, 2018, from http://www.handicapkids.at/index.php?d=0&d2=5
Herrle, S. (2018). Marte Meo Konzept. Retrieved April 11, 2018, from https://martemeo-pfalz.de/konzept.php
Huijnen, C. A. G. J., Lexis, M. A. S., Jansens, R., & de Witte, L. P. (2016). Mapping Robots to Therapy and Educational Objectives for Children with Autism Spectrum Disorder. Journal of Autism and Developmental Disorders, 46(6), 2100–14. http://doi.org/10.1007/s10803-016-2740-6
Huijnen, C. A. G. J., Lexis, M. A. S., Jansens, R., & de Witte, L. P. (2017). How to Implement Robots in Interventions for Children with Autism? A Co-creation Study Involving People with Autism, Parents and Professionals. Journal of Autism and Developmental Disorders, 47(10), 3079–3096. http://doi.org/10.1007/s10803-017-3235-9
Huskens, B., Palmen, A., Van der Werff, M., Lourens, T., & Barakova, E. (2014). Improving Collaborative Play Between Children with Autism Spectrum Disorders and Their Siblings: The Effectiveness of a Robot-Mediated Intervention Based on Lego® Therapy. Journal of Autism and Developmental Disorders, 45(11), 3746–55. http://doi.org/10.1007/s10803-014-2326-0
Huskens, B., Verschuur, R., Gillesen, J., Didden, R., & Barakova, E. (2013). Promoting question-asking in school-aged children with autism spectrum disorders: effectiveness of a robot intervention compared to a human-trainer intervention. Developmental Neurorehabilitation, 16(5), 345–56. http://doi.org/10.3109/17518423.2012.739212
ICD 10. (2017). F84.- Tiefgreifende Entwicklungsstörungen. Retrieved October 7, 2017, from http://www.icd-code.de/icd/code/F84.0.html
Ismail, L. I., Shamsudin, S., Yussof, H., Hanapiah, F. A., & Zahari, N. I. (2012). Robot-based Intervention Program for autistic children with Humanoid Robot NAO: Initial response in stereotyped behavior. Procedia Engineering, 41(Iris), 1441–1447. http://doi.org/10.1016/j.proeng.2012.07.333
69
Jordan, K. A., & Cardon, T. A. (2016). Technology, Autism and Occupational Therapy. In Technology and the Treatment of Children with Autism Spectrum Disorder (p. 160). Springer International.
Kamp- ecker, I., ölte, S. (2014). Autismus (1st ed.). UTB, Stuttgart.
Kemp, C. C., Fitzpatrick, P., Hirukawa, H., Yokoi, K., Harada, K., & Matsumoto, Y. (2010). Humanoids. In B. Siciliano & O. Khatib (Eds.), Springer Handbook of Robotics (Vol. 41, pp. 1307–1329). http://doi.org/10.1111/j.1467-8535.2009.00944.x
Kosinski, M. (2013). Robots teach communication to kids with autism. N C’s. Retrieved from https://www.youtube.com/watch?v=lm3vE7YFsGM
Matthews, S. (2017). Nao robots could soon help children with autism. Retrieved October 30, 2017, from http://www.dailymail.co.uk/health/article-4585140/Could-children-autism-soon-helped-robots.html
Müller, C. (2017). Was ist Autismus? Retrieved December 28, 2017, from https://autismus-kultur.de
Mullin, E. (2015). How Robots Could Improve Social Skills In Kids With Autism. Forbes. Retrieved from https://www.forbes.com/sites/emilymullin/2015/09/25/how-robots-could-improve-social-skills-in-kids-with-autism-disorders/#705a6f582837
National Institute of Child Health and Human Developement. (2017). What are the treatments for autism? Retrieved September 27, 2017, from https://www.nichd.nih.gov/health/topics/autism
Ricks, D. J., & Colton, M. B. (2010). Trends and Considerations in Robot-Assisted Autism Therapy. Retrieved from https://pdfs.semanticscholar.org/f8c7/58e4e6af759a8210ab6967b5a5d0d5d1298b.pdf
Ritschl, V., Stamm, T., & Weigl, R. (2016). Wissenschaftliches Arbeiten und Schreiben: Verstehen, Anwenden, Nutzen für die Praxis (Studium Pflege, Therapie, Gesundheit). Springer-Verlag Berlin Heidelberg.
Rodger, S., & Polatajko, H. J. (2014). Occupational Therapy for Children with Autism. In V. R. Preedy, V. B. Patel, & C. R. Martin (Eds.), Comprehensive Guide to Autism (pp. 2297–2309). Springer New York Heidelberg. http://doi.org/10.1007/978-1-4614-4788-7
Scassellati, ., Admoni, H., Matarić, M., Matari, M., Matarić, M., Henny Admoni, … Matarić, M. (2012). Robots for use in autism research. Annual Review of Biomedical Engineering, 14(1), 275–94. http://doi.org/10.1146/annurev-bioeng-071811-150036
Schirmer, B. (2006). Elternleitfaden Autismus : wie Ihr Kind die elt erlebt mit gezielten Therapien wirksam f rdern ; schwierige Alltagssituationen meistern. TRIAS.
Shamsuddin, S., Yussof, H., Ismail, L. I., Mohamed, S., Hanapiah, F. A., & Zahari, N. I. (2012a). Humanoid robot NAO interacting with autistic children of moderately impaired intelligence to augment communication skills. Procedia Engineering, 41(Iris), 1533–1538. http://doi.org/10.1016/j.proeng.2012.07.346
Shamsuddin, S., Yussof, H., Ismail, L. I., Mohamed, S., Hanapiah, F. A., & Zahari, N. I. (2012b). Initial Response in HRI- a Case Study on Evaluation of Child with Autism Spectrum Disorders Interacting with a Humanoid Robot NAO. Procedia Engineering, 41(Iris), 1448–1455. http://doi.org/10.1016/j.proeng.2012.07.334
Sinzig, J. (2011). Frühkindlicher Autismus. (S. Remschmidt, Ed.). Springer Berlin Heidelberg.
SoftBank Robotics. (2018). NAO robot: Find out more about NAO. Retrieved April 9, 2018, from https://www.ald.softbankrobotics.com/en/robots/nao/find-out-more-about-
70
nao
Srinivasan, S. M., Eigsti, I.-M. M., Gifford, T., & Bhat, A. N. (2016). The effects of embodied rhythm and robotic interventions on the spontaneous and responsive verbal communication skills of children with Autism Spectrum Disorder (ASD): A further outcome of a pilot randomized controlled trial. Research in Autism Spectrum Disorders, 27, 73–87. http://doi.org/10.1016/j.rasd.2016.04.001
Srinivasan, S. M., Eigsti, I.-M., Neelly, L., & Bhat, A. N. (2016). The effects of embodied rhythm and robotic interventions on the spontaneous and responsive social attention patterns of children with Autism Spectrum Disorder (ASD): A pilot randomized controlled trial. Research in Autism Spectrum Disorders, 27, 54–72. http://doi.org/10.1016/j.rasd.2016.01.004
Srinivasan, S. M., Kaur, M., Park, I. K., Gifford, T. D., Marsh, K. L., & Bhat, A. N. (2015). The Effects of Rhythm and Robotic Interventions on the Imitation/Praxis, Interpersonal Synchrony, and Motor Performance of Children with Autism Spectrum Disorder (ASD): A Pilot Randomized Controlled Trial. Autism Research and Treatment, 2015, 736516. http://doi.org/10.1155/2015/736516
Srinivasan, S. M., Park, I. K., Neelly, L. B., & Bhat, A. N. (2015). A comparison of the effects of rhythm and robotic interventions on repetitive behaviors and affective states of children with Autism Spectrum Disorder (ASD). Research in Autism Spectrum Disorders, 18, 51–63. http://doi.org/10.1016/j.rasd.2015.07.004
Stadtfernsehen Schwechat. (2013). CEIT Fitnessprogramm für Senioren in Schwechat - YouTube. Retrieved from https://www.youtube.com/watch?time_continue=1&v=jgBkCepdqGU
Tapus, A., Peca, A., Aly, A., Pop, C., Jisa, L., Pintea, S., … David, D. O. (2012). Children with autism social engagement in interaction with Nao, an imitative robot A series of single case experiments. Interaction Studies, 315–347.
Vanderbilt University. (2013). Interactive Robot Helps Children with Autism. Retrieved from https://www.youtube.com/watch?v=7T7cIY-MIxc
Warren, Z. E., Zheng, Z., Swanson, A. R., ekele, E., Zhang, L., Crittendon, J. A., … Sarkar, N. (2015). Can Robotic Interaction Improve Joint Attention Skills? Journal of Autism and Developmental Disorders, 347(6224), 882–886. http://doi.org/10.1126/science.aaa1823.Using
Warren, Z., Zheng, Z., Das, S., Young, E. M., Swanson, A., Weitlauf, A., & Sarkar, N. (2015). Brief Report: Development of a Robotic Intervention Platform for Young Children with ASD. Journal of Autism and Developmental Disorders, 45(12), 3870–6. http://doi.org/10.1007/s10803-014-2334-0
Westminster Technologies. (2015). NAO: A Story of Robots and Autism. Retrieved from https://www.youtube.com/watch?v=15nehf4AvsE&t=90s
WHO, W. H. O. (2017). Autism spectrum disorders. Retrieved October 7, 2017, from http://www.who.int/mediacentre/factsheets/autism-spectrum-disorders/en/
Zheng, Z., Young, E. M., Swanson, A. R., Weitlauf, A. S., Warren, Z. E., & Sarkar, N. (2016). Robot-Mediated Imitation Skill Training for Children With Autism. IEEE Transactions on Neural Systems and Rehabilitation Engineering : A Publication of the IEEE Engineering in Medicine and Biology Society, 24(6), 682–91. http://doi.org/10.1109/TNSRE.2015.2475724
71
Abbildungsverzeichnis
Abbildung 1: Diagnostische Kriterien des frühkindlichen Autismus nach ICD-10 ............. 10
Wie empfinden Sie das Aussehen von NAO für den Einsatz bei autistischen Kindern?
Welche Rolle sollte NAO einnehmen – als Spielpartner (Gleichaltrigen/Spielgefährten), Spielzeug, Co-
Therapeut
Könnte NAO als Ergänzung in einer Interventionsform wie TEACH, SI, Applied Behavior Approach
eingesetzt werden?
Gibt es eine spezielle Zielgruppe bzw. für welche Kinder wäre NAO ungeeignet?
Welche Vor und Nachteile sehen Sie im Einsatz von NAO?
81
PowerPoint
82
Auszug der Transkription Diskussionsrunde 2
83
Studien Scoping Review
Tabelle 11: Studienergebnisse im Detail
A comparison of the effects of rhythm and robotic interventions on repetitive behaviors and affective states of children with Autism Spectrum Disorder (ASS)
(Srinivasan, Park, et al., 2015)
Design Allgemein Teilnehmerinnen und Teilnehmer Interventionsdauer und Assessment
Pilot RCT Erwachsener machte alle Aktivitäten mit dem Kind mit Robotergruppe: Roboter war Trainer, Erwachsener kontrollierte Roboter Sensorisches Verhalten:
wiederholende Bewegungen mit Objekten Gefühlszustände
Negatives Verhalten: Selbstverletzungen
Anlehnung an Modelle: ABA, TEACCH, Pecs
36 ASS Kinder (32 m / 4w) Alter: 5-12 Jahre 70% Kommunikationsdefizite 82% Defizite des Adaptiven Verhaltens 80% Defizite im täglichen Leben
Früh, Mittlere und Späte Trainingssessions 4 Sessions/Woche über 8 Wochen (Eltern und ExpertInnen) 1 Woche Pretest und Posttest Phase Dauer 45 min Testung
JTAT
Training-specific social attention measure
Studien
resultate
Sensorisches Verhalten: Vergleichsgruppe zeigte mehr unangebrachtes Verhalten gegenüber den anderen Gruppen (visuelle, auditive, taktile / propriozeptive,
olfaktorische oder vestibuläre Modalitäten)
Negative Verhaltensmuster: die Rhythmusgrupe und die Robotergruppe zeigten größeres neg. Verhalten (selbstverletzende Verhaltensweisen) im Vergleich zur
Kontrollgruppe
Stereotype Verhaltensmuster: keine Unterschiede
Gefühlszustände: Rhythmusgruppe zeigte größere positive Affekte gegenüber der Robotergruppe (lachen)
Negativen Affekte war größer in der Roboter und Rhythmusgruppe als in der Vergleichsgruppe
Die Dauer des Interesses war in der Vergleichsgruppe größer
Robotergruppe zeigte nach dem Training eine Reduktion an positiven Verhalten
Diskussion Rhythmus- und Robotergruppe: höheres Maß an negativen Verhaltensweisen und negativen Affekten als die Vergleichsgruppe -> Grund Neuheit und unbeschränkten Art und der Herausforderungen der Kontexte. Freies Bewegen -> negatives Verhalten Weglaufen begünstigt. Motorisch herausfordernd.
Behandlung der Kontrollgruppe war weniger Bewegungsbezogen – Ergebnisse nur mäßig vergleichbar zur Roboter und Rhythmusgruppe
84
The Effects of Rhythm and Robotic Interventions on the Imitation/Praxis, Interpersonal Synchrony, and Motor Performance of Children with Autism Spectrum Disorder (ASS): A Pilot Randomized Controlled Trial
(Srinivasan, Kaur, et al., 2015)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Pilot RCT Trainingssession - Grob/Feinmotorische Fähigkeiten
Früh, Mittlere und Späte Trainingssessions 4 Sessions/Woche über 8 Wochen (Eltern und ExpertInnen) 1 Woche Pretest und Posttest Dauer 45 min
Testung: BOT2; Training-Specific Test of Interpersonal Synchrony
Studien
resultate
BOT-2: keine grundlegenden Unterschiede zwischen den Gruppen in der Körperkoordination und der Feinmotorik
Motorik: Vergleichsgruppe hatte sign. Höhere Werte der Feinmotorik im Vergleich zur Roboter/Rhythmusgruppe, aufgrund der Übung
Nach Kontrolle der Autismusschwere zeigten die Rhythmus- und Robotergruppen Verbesserungen der grobmotorischen Leistung (BOT)
keine ähnlichen Verbesserungen der Feinmotorik
Kinder in der Robotergruppe verbesserten ihre Leistung in der Körperkoordination sign. Im Vergleich
Keine Verbesserung der Feinmotorik
Imitation/Praxis: Robotergruppe sign. Verbesserung von der frühen bis zur späten Sitzung
Die Robotergruppe erhöhte die Zeit, die synchron mit dem Erwachsenen von der frühen bis zur späten Sitzung verbracht wurde
Kinder reduzierten Imitations- / Praxisfehler und verbesserten ihre zwischenmenschlichen Synchronfähigkeiten über die Sitzungen hinweg
Training-Specific Test of Interpersonal Synchrony:
Robotergruppe signifikanter Haupteffekt des Synchronietyps
Diskussion Während der Trainingswochen haben die Kinder möglicherweise ihre Wahrnehmung der anthropomorphen Eigenschaften des Roboters, ihrer Balance, motorischen Nachahmung und multimodaler Koordinationsfähigkeiten sowie ihrer sozialen Überwachungsfähigkeiten verbessert, was zu Verbesserungen in der Imitation / Praxis, der zwischenmenschlichen Synchronität und der gesamten Großmotorik in dieser Gruppe beigetragen haben könnte.
Verbesserungen in den trainingsspezifischen Tests konnten daher auf gewisse Vertrautheitseffekte reduziert werden
Bestätigung gegenüber anderen Studien, Kinder mit ASS konnten Roboter schneller folgen als einem Menschen
85
The effects of embodied rhythm and robotic interventions on the spontaneous and responsive social attention patterns of children with autism spectrum disorder (ASS): A pilot randomized controlled trial
(Srinivasan, Eigsti, Neelly, et al., 2016) The effects of embodied rhythm and robotic interventions on the spontaneous and responsive verbal communication skills of children with Autism Spectrum Disorder (ASS): A further outcome of a pilot randomized controlled trial
(Srinivasan, Eigsti, Gifford, et al., 2016)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Pilot RCT 2 Ergebnisbereiche
+ spontane und ansprechende soziale Aufmerksamkeit + spontane und ansprechende verbale Kommunikationsfähigkeiten von Kindern
Früh, Mittlere und Späte Trainingssessions 4 Sessions/Woche über 8 Wochen (Eltern und ExpertInnen) 1 Woche Pretest und Posttest Dauer 45 min
Studien
resultate
Standardisierter Joint Attention Test:
Robotergruppe: keine Verbesserung
Gegenüberstellung der Gruppen: Robotergruppe schenken den sozialen Partnern mehr Aufmerksamkeit als die Vergleichsgruppe, aber weniger im Vergleich zur Rhythmusgruppe;
Reduktion der Aufmerksamkeit zum Roboter von der frühen Phase zur mittleren/späten
Robotergruppe zeigte die meiste Aufmerksamkeit zum Roboter, dann zum Sozial Partner; und zum Schluss zu den Objekten
Spontanes und reagierendes Verhalten der sozialen Aufmerksamkeit
Robotergruppe zeigte am zweithäufigsten Soziale Aufmerksamkeit, sowie der spontanen Aufmerksamkeit
Rhythmusgruppe schnitt im Vergleich zu den anderen Gruppen am besten ab
Robotergruppe zeigte im Vergleich zur Kontrollgruppe mehr soziale Aufmerksamkeit
Ergebnisse der weiterführenden Studie:
Antworten auf soziale Angaben: keine sign. Ergebnisse von der Pretestmessung zur Endmessung
Trainingsspezifische Veränderungen der sozialen Angebote: keine Verbesserung;
86
Trainingsspezifische Veränderungen der Verbalisation: größere selbstgesteuerte Vokalisierung im Vergleich zur Kontrollgruppe, soziale Verbalisierung war in Kontrollgruppe besser als in der Robotergruppe
Veränderung der Kommunikation zu sozialen Partnern: Rhythmus und Vergleichsgruppe bessere Ergebnisse, die Robotergruppe zeigte mehr Aufmerksamkeit zum menschlichen Model
Rhythmus und Kontrollgruppe initiierten mehr spontane Gespräche im Vgl. zu Robotergruppe
Kommunikation Robotergruppe:
Am wenigsten Kommunikation mit dem Roboter im Vergleich zu anderen Zielen
verbesserte spontane soziale Verbalisierung
am wenigsten spontane soziale Verbalisierung im Vgl. zu den anderen Gruppen
Erhöhung des Grad der sozialen Verbalisierung während der Trainingseinheiten.
keine signifikanten Unterschied zwischen dem Trainer und dem Modell
Trainingsbasierte Veränderungen: Zunahme der Verbalisierung zum erwachsenen Modell
Trotz Verbesserungen des trainingsspezifischen Maßes der sozialen Verbalisierung war die Robotergruppe nicht in der Lage, gelernte Fähigkeiten zu einem standardisierten Test außerhalb des Trainingskontexts zu übertragen
Diskussion Langeweile nach Eingewöhnung -> mehr unangebrachte Verhaltensweisen
Aufmerksamkeit zu Roboter nahm ab
Roboter kein wirksamer Vermittler, um die gemeinsame Aufmerksamkeit zwischen Kindern und ihren Sozialpartnern zu fördern. Kinder widmeten dem Roboter weiterhin maximale Aufmerksamkeit.
visuelle Fixierung auf den Roboter ihre Möglichkeiten, sich mit Sozialpartnern zu engagieren, eingeschränkt hat.
Trainer und Modelle wiederholt Kinder aufbieten, um sie dazu zu bringen, sich vom Roboter zu lösen und Maßnahmen für Erwachsene zu beobachten, die zu mehr Aufmerksamkeit in dieser Gruppe beitragen. .
Einschränkungen Roboter
Angesichts des derzeitigen Stands der Robotertechnologien könnten Kliniker den Einsatz von Robotern als Zusatztherapien für kurzzeitiges Training erwägen, um ein nachhaltiges Engagement zu gewährleisten. Empfehlung:
Entwicklung von halbautonomen Robotern, die ihr Verhalten effektiv an die Bedürfnisse des Kindes anpassen können. Verbesserung des motorischen und verbalen Repertoire von NAO
Forderung: Entwicklung von adaptiven und dynamischen Robotern
Große Altersspanne
Geringe Interventionsdauer
Keine Follow up Testungen
Verwendung des Wizard of Oz Ansatzes, anstelle eines autonomen Roboters
Can Robotic Interaction Improve Joint Attention Skills
(Z. E. Warren et al., 2015)
87
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Longitudinal study
Aufmerksamkeitsaufforderungen über menschlichen Administrator oder Roboter NAO Rolle als Moderator
Prototypsystem ARIA: Wizard-of-Oz Human Control
System , komponentenbasierte verteilte Architektur
6 TN Männlich Alter 4 Jahre DSM-IV-TR Kriterien, SCQ and SRS Nicht beachtet: Baseline Fertigkeiten
4 Sessions über durchschnittlich 2 Wochen 8 Versuche pro Besuch Mit 6 Aufforderungen Instruktion für Kind: nur ein Spiel gespielt
Studien
resultate
Joint Attention
99,48% der 32 Versuche endeten mit der richtigen Blickrichtung; im Laufe der Sitzungen wurden weniger Versuche benötigt- statistisch signifikant (p = 0,003)
In Sitzung 1 endeten 52,8% der Versuche mit einem Zieltreffer bei Aufforderung 1; nach Sitzung 4 waren es 81,25% (p <0,05).
sign. Blickkontakt zum Roboter über die gesamte Session Verbesserung während der Zeit und während der Sessions, jedoch keine klaren spezifischen Verbesserungen in den einzelnen Session -> kein zuverlässiger Prädiktor für Veränderungen im Laufe der Zeit
Aufmerksamkeit gegenüber dem Roboter
Blickkontakt über Großteil der Sitzung gegeben -> kurze Zeitintervalle mehr Präferenz
im Laufe der Zeit eine verbesserte Leistungsfähigkeit in einer grundlegenden sozialen Kommunikationskompetenz und dem Defizitbereich
Diskussion Geringe Teilnehmerzahl
Limitierte Rahmen an Interaktionen
Standardisierte Assessment wurden verwendet
Verzögerung zwischen Auswertung und der Verfügbarkeit der Daten -> Einschränkungen laut Autoren
Daten reichen noch nicht aus, um festzustellen, dass solche kurzfristigen Änderungen zu umfassenderen Veränderungen führen können
Positiv Effekte bei kurzzeitigem Lernen, kein Vergleich zu anderen Methoden
Frage nach einem praktikablen Interventionsparadigma
Experimentelle Sitzung
Pilot clinical application of an adaptive robotic system for young children with autism
(E. Bekele et al., 2014)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
88
Cross-sectional-Study
Roboter gibt Anweisungen wohin Kind seinen Blick richten sollte
Falls dies nicht stattfindet, wird zusätzlich ein Video gezeigt
ARIA Architektur: NAO liefert Aufmerksamkeitsaufforderungen Kontrolle durch Therapeut Baseballmütze mit Kamera Vergleich Mensch vs. Roboter
12 TN: 6 ASS/ 6 normal entwickelte Kinder Alter: 2-5 J
- Sign. Bessere Leistungen beim Blickkontakt zum Roboter in beiden Gruppen
ASS 52.8% auf Roboter, 25,1% auf menschlichen Administrator
TD: 54,3% auf Roboter, 33,6% auf menschlichen Administrator
Aufforderungen
- sign. Bessere Leistungen beim Beantworten der Aufforderungslevels in den robotergestützten Interventionen
ASS Gruppe und TD Gruppe erforderten mehr Prompts unter Roboterbedingungen
Zielfindung
Erfolg für TD Kinder und ASS Kinder lag bei 100% durch menschlichen Administrator
Roboter-Administrator-Bedingung betrug der Erfolg 97,9% für Kinder in der TD-Gruppe und 95,8% für Kinder in der ASS-Gruppe (ohne Sign. Unterschied der Gruppen)
Diskussion
ASS-Kinder mehr Aufmerksamkeit dem Roboter, bessere Genauigkeit der Aufforderungs-/Zielfindung
Keine Ergebnisse bewiesen, dass ASS-Kinder Präferenzen oder Leistungsvorteile innerhalb des Systems im Vergleich zu ihren TD zeigten
Aufmerksamkeitsvorlieben für Roboterinteraktionen über kurze Zeitintervalle
vielversprechende Ergebnisse: unterstützenden Systemfähigkeiten, die potenzielle Relevanz der Anwendung
Kinder mit ASS im Vorschulalter richten ihren Blick häufiger auf den humanoiden Roboter, häufige genaue Reaktion auf NAOS gemeinsame Aufmerksamkeitsaufforderungen. Sie blickten von Zielimpulsen weg.
Verbesserungen für die erfolgreiche Ausrichtung auf eine zielgerichtete Aufforderung
Baseballmütze – Kinder akzeptierten dies nicht, sensorische Reize – nur 60% der Kinder abgeschlossen
Geringe Interventionsdauer
Brief Report: Development of a Robotic Intervention Platform for Young Children with ASS
(Z. Warren et al., 2015)
89
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Single research study
Ziel: Roboter vs. Therapeut
4 Bewegungen:
Heben einer Hand
Heben 2 Hände
Winken
Arme zur Seite Strecken
Klare Einleitung mit Instruktionen
Kind sollte Therapeut oder Roboter imitieren
Korrekte Imitation Nicht korrekt: System kopiert die Bewegung
des Kindes und von dieser Position an die korrekte Anzeige der gestischen Bewegung übertragen. Kind sollte präsentierte Geste imitieren
1. Phase: Verhalten der Kinder wird von Roboter/Mensch nachgemacht
Architektur: ARIA; autonomes System
16 TN
8 ASS /8 TD
(zusätzliche 4 ASS + 2 TD nicht abgeschlossen)
Kriterien:
DSM-IV-TR Kriterien
SCQ
SRS
Alter: durchschnittlich 3 Jahre
2 vom Mensch gestalteten Sessions
2 vom Roboter verwalteten Sessions
Studien
resultate
Aufmerksamkeit zu Administrator
keinen statistisch signifikanten Unterschied zwischen der Aufmerksamkeit für die Roboterintervention und den menschlichen Administrator
Kinder mit ASS mehr Aufmerksamkeit dem Roboter als der menschliche Administrator schenken -> knapp unter Signifikanzschwelle
Imitationstestung
Kinder mit ASS eine höhere Nachahmungsleistung in der Roboter-vs.-Human-Administrator-Bedingung -> signifikante Effektgrößen überstiegen
Leistung einzelner Kinder innerhalb der ASS-Gruppe zeigte, dass etwa 3 der 8 teilnehmenden Kinder eine wesentlich bessere Imitationsleistung im Roboterzustand aufwiesen als die Bedingung für die menschliche Behandlung
Diskussion Geringe TN-Anzahl
Limitierter Interaktionszeitrahmensample
Unklare Basisfähigkeiten
Robot-mediated Imitation Skill Training for Children with Autism
(Zheng et al., 2016)
90
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Ziel: Roboter vs. Mensch Interaktion
2 Gesten mit 2 Versuchen:
Gestenimitation
Aufmerksamkeitsleistung zum Administrator
Roboterintervention
Beginn: Roboter imitiert das Kind Versuch 1: Kind muss Roboter imitieren, bei korrektem Versuch erfolgte ein Lob, ansonst gibt das System eine Rückmeldung zur Verbesserung Versuch 2: beinhaltet 2 Stufen (A/B) bei korrekter Durchführung von Stufe A erfolgt ein Lob, andernfalls kam es zum Spiegelungsmodus Roboter spiegelte Gesten des TN. Imitiert das Kind diese richtig wurde Stufe B weggelassen, Bei Fehlern durfte das Kind in Stufe B den Fehler ausbessern. Nicht zu oft wiederholen- Verlust des Interesses
RISTA: NAO agierte ohne Therapeut
Aufgabenanleiter
16 TN
8 Kinder mit ASS 8 TD Kinder
Alter durchschnittlich 3 Jahre
2 Interventionsphasen mit Menschen
2 Interventionsphasen mit Roboter
Jeweils 2 Versuche
Studien
resultate
Blickkontakt
ASS Gruppe schaute häufiger auf Roboter als auf Therapeuten
Sowohl bei Anleitungen vom Roboter, als auch vom Therapeuten wurde ähnlich viel Zeit benötigt.
TD Gruppe brauchte mehr Zeit für die Interventionen mit dem Roboter
Über die gesamten Sitzungen hinweg, schenkte die ASS Gruppe 11% mehr Zeit dem Roboter als dem Therapeuten im Vergleich zur TD gruppe – ohne statistische sign.
Teilweise Hypothesenbestätigung ASS Kinder mehr Aufmerksamkeit dem Roboter
Interesse an Nachahmungstraining zu wecken
Nachahmungsfähigkeit
ASS Gruppe schnitt in robotergestützten Sitzungen besser ab
Versuch 1 schnellere Imitationsleistung und Initiale Interaktion als mit dem Roboter
91
In Versuch 2 verringerten sich diese Unterschiede, jedoch waren die Leistungen bei der Therapeut-Kind-Imitation geringer
- Schlechteste Imitationsleistung der Winkbewegung
Improving Collaborative Play Between Children with Autism Spectrum Disorders and Their Siblings: The Effectiveness of a Robot-Mediated Intervention Based on Lego Therapy
(Huskens et al., 2014)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
ABAB Design
Lego war das Spielzeug der Kinder
Aufgabenkarten zum Nachbauen
Regelbord mit 6 Spielregeln
Simultanes Design über mehrere Baselines
NAO Kontrolliert durch einen Trainer über einen PC; Wizard of Oz
Roboter gibt Anweisungen über die Rolle der Kinder (Bauer oder Leiter)
6 TN (Zwillinge)
3 TD (2xw/ 1xm)
3 ASS und Asperger Syndrom
Geschlecht: m
Alter: 5-12 Jahren
DSM-IV Kriterien
Baseline/postintervention
3-5 x 30 Min Sitzungen
1 Woche lang 5 x 30 Min
Studien
resultate
Interaktionseinleitung
Keine sign. Ergebnisse
Antwortgebung
2 TN ein Anstieg der Antwortschnelligkeit über Sitzungen hinweg ->
Keine sign. Ergebnisse
Zusammenspiel
Abnahme für 1 Geschwisterpaar TD. Änderung war statistisch signifikant
Mittlere Anteile von "zusammen spielen" für alle Paare während der Intervention verringert
Diskussion geringe Anpassung des Verhaltens des Roboters
Hilfe eines technischen Assistenten benötigt
Struktur geben durch die Spielregeln von Lego -> kollaboratives Verhalten als in unstrukturierten Spielsituationen
Nicht nur Aufmerksamkeit auf NAO, sondern es wurde auch die Wirksamkeit einer Legotherapie untersucht
92
Promoting question-asking in school-aged children with autism spectrum disorders: Effectiveness of a robot intervention compared to a human-trainer intervention
(Huskens et al., 2013)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Crossover multiple baseline design
Anlehnung an Applied behaviour analysis ABA Intervention
Robot Question asking
Wizard of Oz 2 Gruppen 1 Gruppe: Mensch-Roboter Intervention 2 Gruppe: Roboter- Mensch
6 TN
(DSM IV TR)
Randomisiert aufgeteilt in 2 Gruppen. Mensch vs. Robot
Alter: 8-14 Jahre
IQ: über 80
Tagesgruppe: Spielmaterialien: LEGO, toy cars, Fotos
Baseline:
3-5 Sessions x 10 minuten
Fragen stellen nach einem Statement
Intervention
2 Interventionen:
4x10Minuten
Baseline 2_
4 Sessions x 10 Minuten
Follow up nach 4 Wochen
Studien
resultate
Genauso effektiv wie ein Person für das Training des Kommunikationsaspektes: Fragen stellen
Zahl der selbst initiierten Fragen steigt
Diskussion Geringe Stichprobe
Keine Abstimmung von Alter, IQ und sozialer Kommunikationsfähigkeiten in den Gruppen
soziale Validität nicht bewertet – obwohl dies ein wichtiges Merkmal von Interventionsstudien wäre
Interventionsdauer
Keine Langzeitmessung
Exploring the use of a humanoid robot to engage children with Autism Spectrum Disorder (ASS)
(Desideri et al., 2017)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Routineanwendungen um Engagement von ASS Kindern bei Aktivitäten zu verbessern
Jedes Kind mit individuellem Ziel.
Jack: spontanes Antworten, Grobmotorische und vokale Imitation
Andy: spontanes Fragen, Reaktion auf
3 TN
Alter: 4 – 5 Jahre
ABAB Design
Kontrollkondition (A)
3-5 x 10 Min
1:1 Session
1x/Woche
93
Namen, Erlernen von Vokabular
Jean spontanes Fragen, Reaktion auf Namen, Erlernen von Vokabular, Objekte benennen
Single centre, single subject experimental design
Kontrolliert durch Pädagogen
Um gewählte Aktivität zu initiieren und eine sofortige Reaktion von NAO zu garantiere
Roboterintervention (B)
3-5 x 10 Min
1x/Woche
Beide Phasen die gleiche Intervention
Studien
resultate
Statistisch:
Aktive Beteiligung: Interaktion mit Lernumgebung in geeigneter Weise Materialien manipulieren oder anstarren
Im Allgemeinen positive Effekte ->: jedoch nur TN 3 (Jean) sign.
Zielerfüllung:
Die Zielerreichung bezieht sich auf die Häufigkeit, mit der ein gewünschtes (Ziel-) Verhalten während jeder Sitzung ohne Aufforderung aufgetreten ist.
Nur TN 3 sign. Effekte
Therapeutische Sicht:
TN 3 profitierte am meisten -> verlor das Interesse über die Zeit nicht
Roboter genauso effektiv wie traditionelle Therapie
Diskussion Interessensverlust
Geringe Stichprobe
Children with autism social engagement in interaction with Nao, an imitative robot A series of single case experiments
(Tapus et al., 2012)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Single subject ABAC design
Freie Initationen
Initations mit Aufforderung
Blickkontakt
Blickwechsel
Lachen
Phase A:
4 ASS Kinder
DSM IV
Assessment: CARS
Durchschnittliche Fähigkeit der Gestenimitation der Motor Imitation Scale
Alter: 2 Jahren und 8 Monate -6 Jahren
Kind 1: 4 Jahre, moderate Level of Autism, geringe Initiation der sozialen Interaktion
4 Wochen
2 Interventionen/Tag
-Dyadic Interaktion
-10 Minuten Pause
-Triadic Interaktion
94
Baseline: Freies Spiel
Phase B: Eingewöhnung – Fragen stellen
Modellierung –
Therapeut zeigt was NAO kann
Dyadische Interaktion –
Kind-Roboter
Triadische Interaktion
Experte zeigt Aktionen – Kinds soll etwas machen – Roboter ahmt Bewegung des Kindes nach
Phase A: Erste Baseline
Phase C: Roboter wurde durch eine Person ersetzt
Imitiert nur grobmotorisch Bewegungen wie in Phase B
Architektur: Wizard of Oz Technik
Therapeut
Kind-Mensch-Roboter Interaktion
Kind 2: 2 Jahre, schlechte Entwicklung des symbolischen und repräsentativen Spiel, motorische und verbale Stereotyoen Verhaltensweisen
Kind 3: 6 Jahre, moderates Level of Autism
Aufmerksamkeitsspanne sehr gering, selbst stimulierendes Verhalten
Kind 4: 4 Jahre, schwerer Autismus, kognitiv wie 1,5 Jahre
Kind 1+4 schwersten betroffen von ASS
Studien
resultate
Alle Kinder interessiert in NAO – Eingewöhnungsphase, bei Veränderung der Augen
Modulierungsphase: 2 Kinder wechselten Aufmerksamkeit zw. Therapeut und NAO (Kind 1 und
Interaktionsphase: Interesse manifestierte sich, Positiven Emotionen zu Beginn größer als am Ende der Session.
Kind 1 + 2 steigende Frequenz der freien Initiationen -> Verstanden das Experiment;
Kind 3 +4 geringere Rate an freien Initiationen -> nach Aufforderung lächelten sie und schenkten NAO Aufmerksamkeit
Kind 1 + 4 mehr positives Verhalten (Lächeln, Blickrichtung auf NAO)
Kind 2+3 höhere Fluktuation
Gemeinsamer Blick: nur bei Kind 1 zu erkennen
Kind 1: Aufmerksamkeit auf Roboter höher;
Freie Initiation: sign. Unterschied begünstigt in der NAO-Interaktion
Blick: Erhöhung der Blickrichtung, relativ stabil
Lachen: ähnlich wie die der Blickrichtung Nao-Interaktionsverfahren einen signifikanten positiven Effekt auf die positive Affekte, dies nahm aber nach 3 Sitzungen ab-> Gewöhnungseffekt.
Vergleich zur Mensch-Interaktion sign. Bessere Ergebnisse bei NAO
Gemeinsamer Blick: NAO Interaktion bessere Ergebnisse, positiver Trend in den letzten Sitzungen, im Vergleich zur Mensch-Interaktion (Blickverhalten fast nicht vorhanden)
Zusatz
Phase B: gesteigertes Interesse zu NAO, jedoch ängstlich und vorsichtig, Kontakt zu Experimentator
wechselnden Augenfarbe des Nao sehr angezogen
ersten 2-3 Minuten der Interaktionssitzungen initiierte das Kind spontan motorische Bewegungen, begleitet von Lachen, Intensität der freien Initiation nahm aber über Sitzungen ab
Im Vergleich zur Mensch-Interaktion nahm die Intensität der Reaktionen sehr stark ab
Kind 2: Zusatz
95
Blickrichtung: hohen Fluktuationen bei Roboter
keinen Effekt
Gewöhnungseffekt in Phase C
Lachen: fluktuierenden Trend für die positive Affektvariable
Geteilter Blick: keinen signifikanten Unterschied zwischen Phase B (Nao-Interaktion) und Phase C (menschliche Interaktion), was darauf hindeutet, dass der Nao-Roboter kein Objekt gemeinsamer Aufmerksamkeit ist
Imitation eines Erwachsenen, aber freie Initiation niedrig
Modellierungsphase: Kind verstand Aufgabe sofort, blieb in Position bis Roboter es spiegelte
Kind probierte komplizierte Bewegungen aus- Roboter konnte dies aufgrund von mechanischen Einschränken nicht ausführen
Zu Beginn jeder Sitzung mehr Interesse und mehr Initiationen
Verhalten des Kindes wurde bei menschlichen Partner immer komplexer, da dieser mehr Bewegungen hatte und spiegeln konnte
Phase C manifestierte das Kinder mehr Initiationen
Kind 3
Die Daten zeigen, dass der Unterschied zwischen Phase B und der Basislinie A (2) nicht signifikant ist, was nahelegt, dass das Kind das in der Interaktion mit dem Nao-Roboter erlernte Verhalten auf die Interaktion mit der menschlichen Person übertragen hat.
Freie Initiation: kein Effekt für die Nao
Blickverhalten: kein Einfluss von NAO
Lachen: kein Effekt
Gemeinsamer Blick: NAO unterstützt nicht
Zusatz
Modulierungsphase: Aufmerksamkeit wechselt zwischen Roboter und Person
Verstand Spieglungsaufgabe, schaute auf Roboter bei Bewegungsinitiation
Mensch Interaktion: mochte Kind nicht
Kind 4:
Gesamtanzahl der Initiationen: keine sign. Unterschiede
Freie Initiationen: keine sign. Veränderungen, besteht Tendenz das Nao-Interaktion freie Initiationen unterstützen
Blickverhalten: sign. Anstieg in NAO Interaktion, Motivation und Interesse
Lachen: Kind genoss Interaktion mit NAO mehr als mit Person vermehrtes Lachen
Geteilter Blick: gemeinsames Aufmerksamkeitsverhalten wird nicht unterstützt
Zusatz
In Phase A zeigte das Kind Ablehnungsverhalten und Stereotype Verhaltensweisen und vermied Interaktionen
NAO Interaktion: sehr aufmerksam auf Roboter, stereotype Handlungen niedrig,
Mensch-Interaktionsphase: Kind frustriert, lehnte Interaktion ab
Diskussion Eingeschränkte Motorik: Keine sinnvollen Gesten zu imitieren Möglicherweise Gewöhnungseffekt Starre Anweisungen, keine zufällige Interaktion – experimentelles Setting Studien durchgeführt mit bestimmten Faktoren: Charakteristiken der Kinder etc.
Humanoid Robot NAO Interacting with Autistic Children of Moderately Impaired Intelligence to Augment Communication Skills
(Shamsuddin et al., 2012a)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
96
Pilot Study Ziel: Mensch-Roboter-Interaktion
Experiment Protokoll
Modul 1: Kennenlernen ohne Musik, Bewegung oder Sprache
Modul 2: Begrüßung des Roboters- Fragen
Modul 3: NAO Armbewegung: Winken
Modul 4: „Song Play and Eyes link“: Kinderlieder
Modul 5: NAO Song Play and Hand Movement – Kombination von Armbewegung und Musik
Vs.
Beobachtung des Klassenverhaltens
5 TN:
4 Buben 1 Mädchen
Alter: 6-13 Jahren
Diagnose: FSIQ = 52
14 min 30 sec für 5 Module
Jeweils 30 Sekunden Pause
Studien
resultate
Kommunikation:: 4 von 5 Kindern zeigten eine Abnahme des autistischen Verhaltens mit Roboter
Diskussion Aufmerksamkeit der Kinder zu erregen und somit jedes Kind während der Interaktion mit dem Roboter in Kontakt zu halten
autistische Kinder mit mäßig beeinträchtigten FSIQ (von 40-54) für eine roboterbasierte Intervention geeignet
Roboter-based Intervention Programm for Autistic Children with Humanoid Robot NAO: Initial Response in Stereotyped Behavior.
(Ismail et al., 2012)
Design Allgemein Teilnehmerinnen und Teilnehmer Dauer
Technische Universität von Malaysia
Roboter Based Intervention Programm
Experiment Protokoll
Modul 1: Kennenlernen ohne Musik, Bewegung oder Sprache
Modul 2: Begrüßung des Roboters- Fragen
Modul 3: NAO Armbewegung: Winken
Modul 4: „Song Play and Eyes link“: Kinderlieder
Modul 5: NAO Song Play and Hand Movement – Kombination von Armbewegung und Musik
Experimenten- vs. Klassenzimmersetting
6 ASS Kinder
IQ: 44-107
Alter: nicht angegeben
14 min 30 sec für 5 Module
Jeweils 30 Sekunden Pause
In Roboterinteraktion und im normalen Schulsetting
97
Studien
resultate
Auswertung erfolgte durch Ergotherapeuten, Klinischen Psychologen
Stereotypisches Verhalten
in Klassenzimmer deutlich mehr im Vergleich zur RBIP
(ein Kind zeigte mehr stereotypes Verhalten in der RBIP als im Klassenzimmer – aufgrund von neuartiger Situation)
Kinder mit einem höheren Full Scale Intelligence Quotient zeigen weniger stereotype Verhaltensweisen in der RBIP im Vergleich zum Schulsetting
Diskussion Differenzierte Settings, Vergleich schwierig aufgrund der Umgebung, wenig Angaben über diese Settings: Lautstärke im Klassenzimmer, andere Kinder möglicherweise Indikatoren für das schlechtere Abschneiden