Page 1
Metode directe pentru sisteme de ecuatii liniareEliminare gaussiana, descompunere LU, Cholesky
Radu T. Trımbitas
Universitatea ”Babes-Bolyai”
March 26, 2008
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 1 / 42
Page 2
Descompunerea LU
Descompunerea LU
Transforma A ∈ Cm×m ıntr-o matrice triunghiulara superior, Uscazand multiplii de linii
Fiecare Li introduce zerouri sub diagonala ın coloana i :
Lm−1 . . . L2L1︸ ︷︷ ︸L−1
A = U =⇒ A = LU unde L = L−11 L−1
2 . . . L−1m−1
× × × ×× × × ×× × × ×× × × ×
A
L1→
× × × ×0 × × ×0 × × ×0 × × ×
L1A
L2→
× × × ×× × ×0 × ×0 × ×
L2L1A
L3→
× × × ×× × ×× ×0 ×
L3L2L1A
“Triunghiularizare triunghiulara”
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 2 / 42
Page 3
Matricele Lk
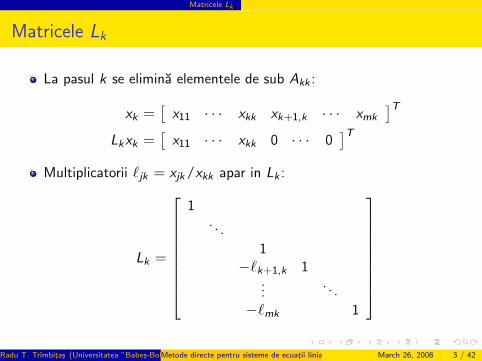
Matricele Lk
La pasul k se elimina elementele de sub Akk :
xk =[
x11 · · · xkk xk+1,k · · · xmk
]TLkxk =
[x11 · · · xkk 0 · · · 0
]TMultiplicatorii `jk = xjk/xkk apar in Lk :
Lk =
1. . .
1−`k+1,k 1
.... . .
−`mk 1
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 3 / 42
Page 4
Constructia lui L
Constructia lui L
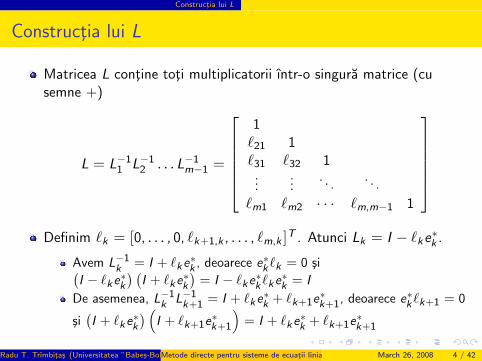
Matricea L contine toti multiplicatorii ıntr-o singura matrice (cusemne +)
L = L−11 L−1
2 . . . L−1m−1 =
1
`21 1`31 `32 1
......
. . .. . .
`m1 `m2 · · · `m,m−1 1
Definim `k = [0, . . . , 0, `k+1,k , . . . , `m,k ]T . Atunci Lk = I − `ke∗k .
Avem L−1k = I + `ke∗k , deoarece e∗k`k = 0 si(
I − `ke∗k) (
I + `ke∗k)
= I − `ke∗k`ke∗k = I
De asemenea, L−1k L−1
k+1 = I + `ke∗k + `k+1e∗k+1, deoarece e∗k`k+1 = 0
si(I + `ke∗k
) (I + `k+1e∗k+1
)= I + `ke∗k + `k+1e∗k+1
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 4 / 42
Page 5
Eliminare gaussiana fara pivotare
Eliminare gaussiana fara pivotare
Se factorizeaza A ∈ Cm×m ın A = LU
Eliminare gaussiana fara pivot
U := A; L = I ;for k := 1 to m− 1 do
for j := k + 1 to m do`jk := ujk/ukk ;uj ,k :m := uj ,k :m − `jkuk,k :m;
Ciclul interior poate fi scris utilizand operatii matriciale ın loc decicluri for
Numar de operatii (complexitatea)∼ ∑m
k=1 2(m− k)(m− k) ∼ 2 ∑mk=1 k2 ∼ 2
3 m3
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 5 / 42
Page 6
Eliminare gaussiana cu produs exterior
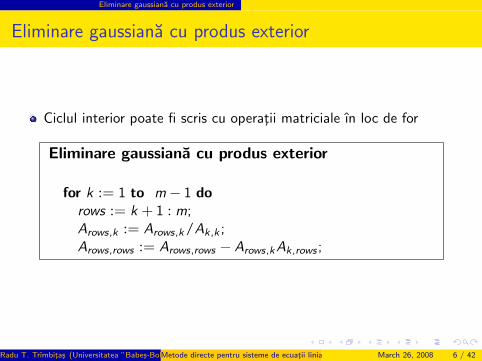
Eliminare gaussiana cu produs exterior
Ciclul interior poate fi scris cu operatii matriciale ın loc de for
Eliminare gaussiana cu produs exterior
for k := 1 to m− 1 dorows := k + 1 : m;Arows,k := Arows,k/Ak,k ;Arows,rows := Arows,rows − Arows,kAk,rows ;
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 6 / 42
Page 7
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
De ce este necesara pivotarea
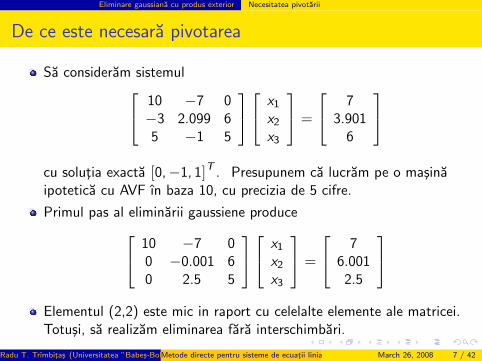
Sa consideram sistemul 10 −7 0−3 2.099 65 −1 5
x1
x2
x3
=
73.901
6
cu solutia exacta [0,−1, 1]T . Presupunem ca lucram pe o masinaipotetica cu AVF ın baza 10, cu precizia de 5 cifre.
Primul pas al eliminarii gaussiene produce 10 −7 00 −0.001 60 2.5 5
x1
x2
x3
=
76.001
2.5
Elementul (2,2) este mic in raport cu celelalte elemente ale matricei.Totusi, sa realizam eliminarea fara interschimbari.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 7 / 42
Page 8
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
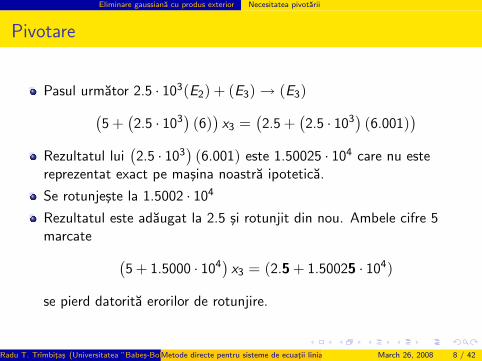
Pasul urmator 2.5 · 103(E2) + (E3)→ (E3)(5 +
(2.5 · 103
)(6))
x3 =(2.5 +
(2.5 · 103
)(6.001)
)Rezultatul lui
(2.5 · 103
)(6.001) este 1.50025 · 104 care nu este
reprezentat exact pe masina noastra ipotetica.
Se rotunjeste la 1.5002 · 104
Rezultatul este adaugat la 2.5 si rotunjit din nou. Ambele cifre 5marcate (
5 + 1.5000 · 104)
x3 = (2.5 + 1.50025 · 104)
se pierd datorita erorilor de rotunjire.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 8 / 42
Page 9
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
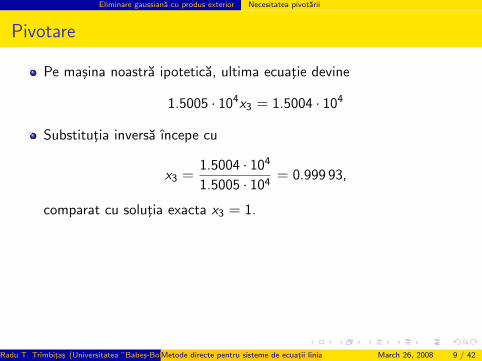
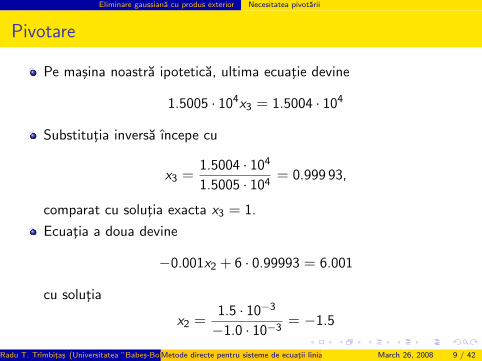
Pe masina noastra ipotetica, ultima ecuatie devine
1.5005 · 104x3 = 1.5004 · 104
Substitutia inversa ıncepe cu
x3 =1.5004 · 104
1.5005 · 104= 0.999 93,
comparat cu solutia exacta x3 = 1.
Ecuatia a doua devine
−0.001x2 + 6 · 0.99993 = 6.001
cu solutia
x2 =1.5 · 10−3
−1.0 · 10−3= −1.5
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 9 / 42
Page 10
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Pe masina noastra ipotetica, ultima ecuatie devine
1.5005 · 104x3 = 1.5004 · 104
Substitutia inversa ıncepe cu
x3 =1.5004 · 104
1.5005 · 104= 0.999 93,
comparat cu solutia exacta x3 = 1.
Ecuatia a doua devine
−0.001x2 + 6 · 0.99993 = 6.001
cu solutia
x2 =1.5 · 10−3
−1.0 · 10−3= −1.5
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 9 / 42
Page 11
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Pe masina noastra ipotetica, ultima ecuatie devine
1.5005 · 104x3 = 1.5004 · 104
Substitutia inversa ıncepe cu
x3 =1.5004 · 104
1.5005 · 104= 0.999 93,
comparat cu solutia exacta x3 = 1.
Ecuatia a doua devine
−0.001x2 + 6 · 0.99993 = 6.001
cu solutia
x2 =1.5 · 10−3
−1.0 · 10−3= −1.5
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 9 / 42
Page 12
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
In fine, x1 se obtine din ecuatia
10x1 + (−7)(−1.5) = 7,
care dax1 = −0.35.
In loc de [0,−1, 1]T , am obtinut [−0.35,−1.5, 0.99993]T .Inacceptabil!
Nu am avut o acumulare a erorilor de rotunjire, iar matricea este bineconditionata.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 10 / 42
Page 13
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
In fine, x1 se obtine din ecuatia
10x1 + (−7)(−1.5) = 7,
care dax1 = −0.35.
In loc de [0,−1, 1]T , am obtinut [−0.35,−1.5, 0.99993]T .Inacceptabil!
Nu am avut o acumulare a erorilor de rotunjire, iar matricea este bineconditionata.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 10 / 42
Page 14
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
In fine, x1 se obtine din ecuatia
10x1 + (−7)(−1.5) = 7,
care dax1 = −0.35.
In loc de [0,−1, 1]T , am obtinut [−0.35,−1.5, 0.99993]T .Inacceptabil!
Nu am avut o acumulare a erorilor de rotunjire, iar matricea este bineconditionata.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 10 / 42
Page 15
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Necazurile provin de la alegerea unui pivot mic la al doilea pas aleliminarii.
Pivotul conduce la un multiplicator de 2.5 · 103, iar la ultima ecuatiese ajunge la coeficienti de 103 ori mai mari decat ın problemaoriginala.
Erorile de rotunjire mici ın raport cu acesti coeficienti suntinacceptabile comparativ cu matricea originala si solutia exacta.
Eliminarea gaussiana fara pivotare este instabila!
Daca efectuam (E2)←→ (E3), nu mai apar multiplicatori mari sirezultatul final este precis.
Daca multiplicatorii sunt < 1 ın modul avem garantia ca solutia esteprecisa.
Aceasta se asigura prin pivotare partiala.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 11 / 42
Page 16
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Necazurile provin de la alegerea unui pivot mic la al doilea pas aleliminarii.
Pivotul conduce la un multiplicator de 2.5 · 103, iar la ultima ecuatiese ajunge la coeficienti de 103 ori mai mari decat ın problemaoriginala.
Erorile de rotunjire mici ın raport cu acesti coeficienti suntinacceptabile comparativ cu matricea originala si solutia exacta.
Eliminarea gaussiana fara pivotare este instabila!
Daca efectuam (E2)←→ (E3), nu mai apar multiplicatori mari sirezultatul final este precis.
Daca multiplicatorii sunt < 1 ın modul avem garantia ca solutia esteprecisa.
Aceasta se asigura prin pivotare partiala.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 11 / 42
Page 17
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Necazurile provin de la alegerea unui pivot mic la al doilea pas aleliminarii.
Pivotul conduce la un multiplicator de 2.5 · 103, iar la ultima ecuatiese ajunge la coeficienti de 103 ori mai mari decat ın problemaoriginala.
Erorile de rotunjire mici ın raport cu acesti coeficienti suntinacceptabile comparativ cu matricea originala si solutia exacta.
Eliminarea gaussiana fara pivotare este instabila!
Daca efectuam (E2)←→ (E3), nu mai apar multiplicatori mari sirezultatul final este precis.
Daca multiplicatorii sunt < 1 ın modul avem garantia ca solutia esteprecisa.
Aceasta se asigura prin pivotare partiala.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 11 / 42
Page 18
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Necazurile provin de la alegerea unui pivot mic la al doilea pas aleliminarii.
Pivotul conduce la un multiplicator de 2.5 · 103, iar la ultima ecuatiese ajunge la coeficienti de 103 ori mai mari decat ın problemaoriginala.
Erorile de rotunjire mici ın raport cu acesti coeficienti suntinacceptabile comparativ cu matricea originala si solutia exacta.
Eliminarea gaussiana fara pivotare este instabila!
Daca efectuam (E2)←→ (E3), nu mai apar multiplicatori mari sirezultatul final este precis.
Daca multiplicatorii sunt < 1 ın modul avem garantia ca solutia esteprecisa.
Aceasta se asigura prin pivotare partiala.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 11 / 42
Page 19
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Necazurile provin de la alegerea unui pivot mic la al doilea pas aleliminarii.
Pivotul conduce la un multiplicator de 2.5 · 103, iar la ultima ecuatiese ajunge la coeficienti de 103 ori mai mari decat ın problemaoriginala.
Erorile de rotunjire mici ın raport cu acesti coeficienti suntinacceptabile comparativ cu matricea originala si solutia exacta.
Eliminarea gaussiana fara pivotare este instabila!
Daca efectuam (E2)←→ (E3), nu mai apar multiplicatori mari sirezultatul final este precis.
Daca multiplicatorii sunt < 1 ın modul avem garantia ca solutia esteprecisa.
Aceasta se asigura prin pivotare partiala.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 11 / 42
Page 20
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Necazurile provin de la alegerea unui pivot mic la al doilea pas aleliminarii.
Pivotul conduce la un multiplicator de 2.5 · 103, iar la ultima ecuatiese ajunge la coeficienti de 103 ori mai mari decat ın problemaoriginala.
Erorile de rotunjire mici ın raport cu acesti coeficienti suntinacceptabile comparativ cu matricea originala si solutia exacta.
Eliminarea gaussiana fara pivotare este instabila!
Daca efectuam (E2)←→ (E3), nu mai apar multiplicatori mari sirezultatul final este precis.
Daca multiplicatorii sunt < 1 ın modul avem garantia ca solutia esteprecisa.
Aceasta se asigura prin pivotare partiala.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 11 / 42
Page 21
Eliminare gaussiana cu produs exterior Necesitatea pivotarii
Pivotare
Necazurile provin de la alegerea unui pivot mic la al doilea pas aleliminarii.
Pivotul conduce la un multiplicator de 2.5 · 103, iar la ultima ecuatiese ajunge la coeficienti de 103 ori mai mari decat ın problemaoriginala.
Erorile de rotunjire mici ın raport cu acesti coeficienti suntinacceptabile comparativ cu matricea originala si solutia exacta.
Eliminarea gaussiana fara pivotare este instabila!
Daca efectuam (E2)←→ (E3), nu mai apar multiplicatori mari sirezultatul final este precis.
Daca multiplicatorii sunt < 1 ın modul avem garantia ca solutia esteprecisa.
Aceasta se asigura prin pivotare partiala.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 11 / 42
Page 22
Pivotare
Pivotare
La pasul k, am utilizat elementul k , k al matricei ca pivot si amintrodus zerouri ın pozitia k a liniilor ramase
× × × × ×xkk × × ×× × × ×× × × ×× × × ×
−→× × × × ×
xkk × × ×0 × × ×0 × × ×0 × × ×
Dar, orice alt element i ≥ k din coloana k poate fi utilizat ca pivot:
× × × × ×× × × ×× × × ×xik × × ×× × × ×
−→× × × × ×
0 × × ×0 × × ×
xik × × ×0 × × ×
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 12 / 42
Page 23
Pivotare Pivotare
Pivotare
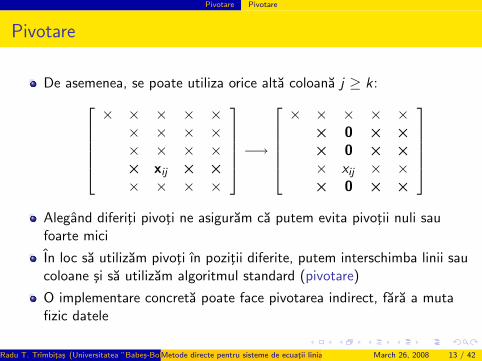
De asemenea, se poate utiliza orice alta coloana j ≥ k:× × × × ×× × × ×× × × ×× xij × ×× × × ×
−→× × × × ×
× 0 × ×× 0 × ×× xij × ×× 0 × ×
Alegand diferiti pivoti ne asiguram ca putem evita pivotii nuli saufoarte mici
In loc sa utilizam pivoti ın pozitii diferite, putem interschimba linii saucoloane si sa utilizam algoritmul standard (pivotare)
O implementare concreta poate face pivotarea indirect, fara a mutafizic datele
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 13 / 42
Page 24
Pivotare Pivotare partiala
Pivotare partiala
Alegerea pivotilor dintre toti candidatii valizi este costisitoare(pivotarecompleta)
Consideram doar pivotii din coloana k si interschimbamliniile(pivotare partiala)× × × × ×× × × ×× × × ×xik × × ×× × × ×
Selectie pivot
P1−→
× × × × ×
xik × × ×× × × ×× × × ×× × × ×
Interschimbare linii
L1−→
× × × × ×
xik × × ×0 × × ×0 × × ×0 × × ×
Eliminare
Cu operatii matriceale:
Lm−1Pm−1 . . . L2P2L1P1A = U
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 14 / 42
Page 25
Factorizarea PA = LU
Factorizarea PA = LU
Pentru a combina toti Lk si toti Pk ın forma dorita de noi, rescriemfactorizarea precedenta sub forma
Lm−1Pm−1 . . . L2P2L1P1A = U(L′m · · · L′2L′1
)(Pm−1 · · ·P2P1) A = U
undeL′k = Pm−1 · · ·Pk+1LkP−1
k+1 · · ·P−1m−1
Aceasta ne da factorizare (descompunerea) LU a lui A
PA = LU
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 15 / 42
Page 26
Eliminarea gaussiana cu pivotare partiala
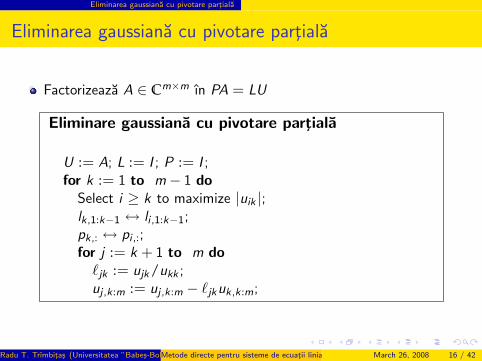
Eliminarea gaussiana cu pivotare partiala
Factorizeaza A ∈ Cm×m ın PA = LU
Eliminare gaussiana cu pivotare partiala
U := A; L := I ; P := I ;for k := 1 to m− 1 do
Select i ≥ k to maximize |uik |;lk,1:k−1 ↔ li ,1:k−1;pk,: ↔ pi ,:;for j := k + 1 to m do
`jk := ujk/ukk ;uj ,k :m := uj ,k :m − `jkuk,k :m;
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 16 / 42
Page 27
Eliminarea gaussiana cu pivotare partiala Exemplu
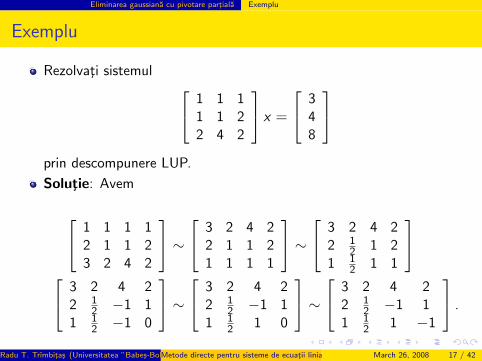
Exemplu
Rezolvati sistemul 1 1 11 1 22 4 2
x =
348
prin descompunere LUP.
Solutie: Avem
1 1 1 12 1 1 23 2 4 2
∼ 3 2 4 2
2 1 1 21 1 1 1
∼ 3 2 4 2
2 12 1 2
1 12 1 1
3 2 4 2
2 12 −1 1
1 12 −1 0
∼ 3 2 4 2
2 12 −1 1
1 12 1 0
∼ 3 2 4 2
2 12 −1 1
1 12 1 −1
.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 17 / 42
Page 28
Eliminarea gaussiana cu pivotare partiala Exemplu
Exemplu (continuare)
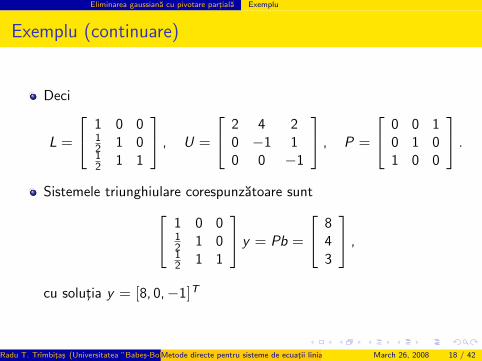
Deci
L =
1 0 012 1 012 1 1
, U =
2 4 20 −1 10 0 −1
, P =
0 0 10 1 01 0 0
.
Sistemele triunghiulare corespunzatoare sunt 1 0 012 1 012 1 1
y = Pb =
843
,
cu solutia y = [8, 0,−1]T
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 18 / 42
Page 29
Eliminarea gaussiana cu pivotare partiala Exemplu
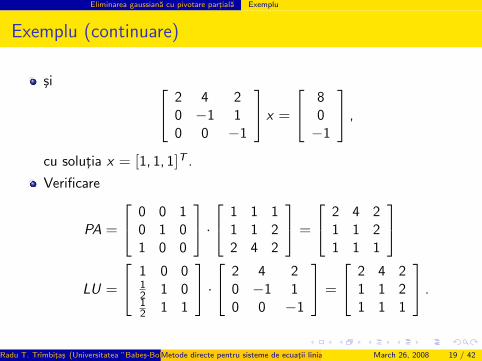
Exemplu (continuare)
si 2 4 20 −1 10 0 −1
x =
80−1
,
cu solutia x = [1, 1, 1]T .
Verificare
PA =
0 0 10 1 01 0 0
· 1 1 1
1 1 22 4 2
=
2 4 21 1 21 1 1
LU =
1 0 012 1 012 1 1
· 2 4 2
0 −1 10 0 −1
=
2 4 21 1 21 1 1
.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 19 / 42
Page 30
Pivotare totala
Pivotare totala
Daca se selecteaza pivoti din coloane diferite, sunt necesare matricede permutare la stanga Qk :
Lm−1Pm−1 · · · L2P2L1P1AQ1Q2 · · ·Qm−1 = U
(L′m−1 · · · L′2L′1)(Pm−1 · · ·P2P1)A(Q1Q2 · · ·Qm−1) = U
Punem
L = (L′m−1 · · · L′2L′1)−1
P = Pm−1 · · ·P2P1
Q = Q1Q2 · · ·Qm−1
pentru a obtinePAQ = LU
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 20 / 42
Page 31
Pivotare totala
Liu Hui c. 220 –c. 280Matematician chinez, adiscutat eliminarea,,gaussiana” ın comentariilesale asupra lucrarii ,,Cele nouacapitole ale artei matematice”263 AD
Carl Friedrich Gauss 1777-1855Matematica, astronomie,geodezie, magnetism1809 GE(Ca adolescent ınBraunschweig a descoperitteorema binomiala,reciprocitatea patratica, mediaaritmetico-geometrica. . . )1807-1855: Universitatea dinGottingen
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 21 / 42
Page 32
Stabilitatea LU Stabilitatea LU fara pivotare
Stabilitatea LU fara pivotare
Pentru A = LU calculata fara pivotare:
LU = A + δA,‖δA‖‖L‖ ‖U‖ = O(eps)
Eroare se refera la LU, nu la L sau U
Nota: la numitor apare ‖L‖ ‖U‖, nu ‖A‖‖L‖ si ‖U‖ pot fi arbitrar de mari, de exemplu
A =[
10−20 11 1
]=[
1 01020 1
] [10−20 1
0 1− 1020
]Deci, algoritmul este nestabil
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 22 / 42
Page 33
Stabilitatea LU Stabilitatea LU cu pivotare
Stabilitatea LU cu pivotare
Daca se face pivotare, toate elementele lui L sunt ≤1 ın modul, deci‖L‖ = O(1)Pentru a masura cresterea lui U, se introduce factorul de cretere
ρ =maxij |uij |maxij |aij |
care implica ‖U‖ = O(ρ ‖A‖)Pentru descompunerea PA = LU calculata cu pivotare:
LU = PA + δA,‖δA‖‖A‖ = O(ρeps)
Daca ρ = O(1), atunci algoritmul este regresiv stabil
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 23 / 42
Page 34
Stabilitatea LU Factorul de crestere
Factorul de crestere
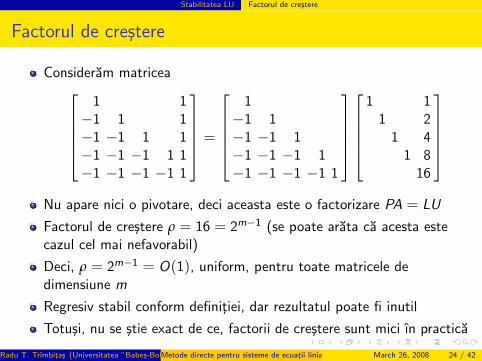
Consideram matricea1 1−1 1 1−1 −1 1 1−1 −1 −1 1 1−1 −1 −1 −1 1
=
1−1 1−1 −1 1−1 −1 −1 1−1 −1 −1 −1 1
1 11 2
1 41 8
16
Nu apare nici o pivotare, deci aceasta este o factorizare PA = LU
Factorul de crestere ρ = 16 = 2m−1 (se poate arata ca acesta estecazul cel mai nefavorabil)
Deci, ρ = 2m−1 = O(1), uniform, pentru toate matricele dedimensiune m
Regresiv stabil conform definitiei, dar rezultatul poate fi inutil
Totusi, nu se stie exact de ce, factorii de crestere sunt mici ın practica
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 24 / 42
Page 35
Descompunerea Cholesky Matrice SPD
Matrice SPD
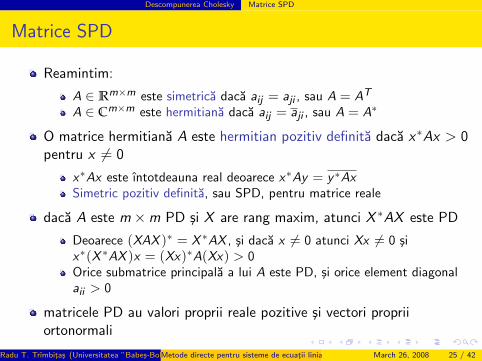
Reamintim:
A ∈ Rm×m este simetrica daca aij = aji , sau A = AT
A ∈ Cm×m este hermitiana daca aij = aji , sau A = A∗
O matrice hermitiana A este hermitian pozitiv definita daca x∗Ax > 0pentru x 6= 0
x∗Ax este ıntotdeauna real deoarece x∗Ay = y∗AxSimetric pozitiv definita, sau SPD, pentru matrice reale
daca A este m×m PD si X are rang maxim, atunci X ∗AX este PD
Deoarece (XAX )∗ = X ∗AX , si daca x 6= 0 atunci Xx 6= 0 six∗(X ∗AX )x = (Xx)∗A(Xx) > 0Orice submatrice principala a lui A este PD, si orice element diagonalaii > 0
matricele PD au valori proprii reale pozitive si vectori propriiortonormali
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 25 / 42
Page 36
Descompunerea Cholesky Factorizarea Cholesky
Factorizarea Cholesky
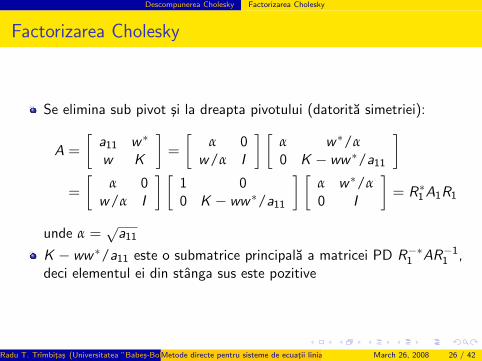
Se elimina sub pivot si la dreapta pivotului (datorita simetriei):
A =[
a11 w ∗
w K
]=[
α 0w/α I
] [α w ∗/α0 K − ww ∗/a11
]=[
α 0w/α I
] [1 00 K − ww ∗/a11
] [α w ∗/α0 I
]= R∗1 A1R1
unde α =√
a11
K − ww ∗/a11 este o submatrice principala a matricei PD R−∗1 AR−11 ,
deci elementul ei din stanga sus este pozitive
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 26 / 42
Page 37
Descompunerea Cholesky Factorizarea Cholesky
Factorizarea Cholesky
Se aplica recursiv si se obtine
A = (R∗1 R∗2 . . . R∗m)(Rm . . . R2R1) = R∗R, rii > 0
Existenta si unicitatea: orice matrice HPD are o factorizare Choleskyunica
Algoritmul recursiv de pe folia precedenta nu esueaza niciodataRezulta si unicitatea, deoarece α =
√a11 este determinat unic (dat) la
fiecare pas si la fel, ıntreaga linie w/α
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 27 / 42
Page 38
Descompunerea Cholesky Algoritmul de factorizare Cholesky
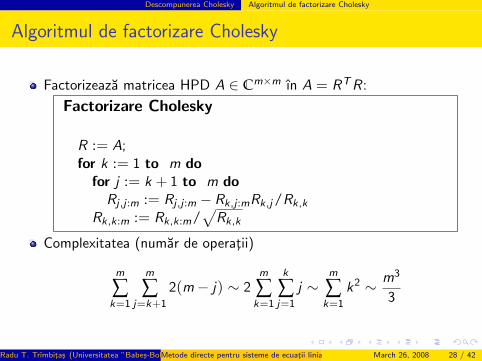
Algoritmul de factorizare Cholesky
Factorizeaza matricea HPD A ∈ Cm×m ın A = RT R:
Factorizare Cholesky
R := A;for k := 1 to m do
for j := k + 1 to m doRj ,j :m := Rj ,j :m − Rk,j :mRk,j/Rk,k
Rk,k :m := Rk,k :m/√
Rk,k
Complexitatea (numar de operatii)
m
∑k=1
m
∑j=k+1
2(m− j) ∼ 2m
∑k=1
k
∑j=1
j ∼m
∑k=1
k2 ∼ m3
3
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 28 / 42
Page 39
Descompunerea Cholesky Exemplu
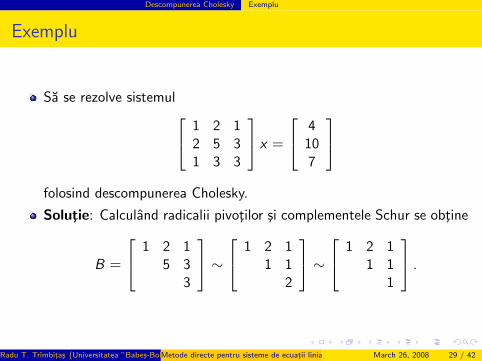
Exemplu
Sa se rezolve sistemul 1 2 12 5 31 3 3
x =
4107
folosind descompunerea Cholesky.
Solutie: Calculand radicalii pivotilor si complementele Schur se obtine
B =
1 2 15 3
3
∼ 1 2 1
1 12
∼ 1 2 1
1 11
.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 29 / 42
Page 40
Descompunerea Cholesky Exemplu
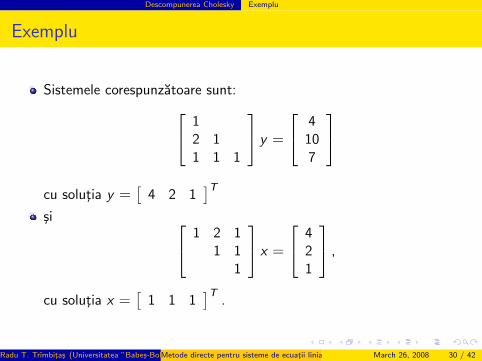
Exemplu
Sistemele corespunzatoare sunt: 12 11 1 1
y =
4107
cu solutia y =
[4 2 1
]Tsi 1 2 1
1 11
x =
421
,
cu solutia x =[
1 1 1]T
.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 30 / 42
Page 41
Descompunerea Cholesky Stabilitateatea
Stabilitatea
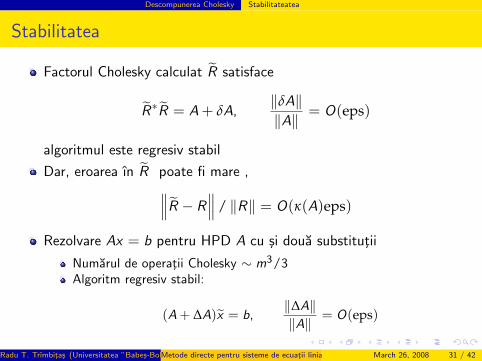
Factorul Cholesky calculat R satisface
R∗R = A + δA,‖δA‖‖A‖ = O(eps)
algoritmul este regresiv stabil
Dar, eroarea ın R poate fi mare ,∥∥∥R − R∥∥∥ / ‖R‖ = O(κ(A)eps)
Rezolvare Ax = b pentru HPD A cu si doua substitutii
Numarul de operatii Cholesky ∼ m3/3Algoritm regresiv stabil:
(A + ∆A)x = b,‖∆A‖‖A‖ = O(eps)
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 31 / 42
Page 42
Backslash ın MATLAB
Backslash ın MATLAB
x=A\b pentru A densa realizeaza urmatorii pasi
1 Daca A este triunghiulara superior sau inferior se rezolva prinsubstitutie inversa sau directa
2 Daca A este o permutare a unei matrice triunghiulare, se rezolva prinsubstitutie (utila pentru [L,U]=lu(A) caci L este permutata)
3 Daca A este simetrica sau hermitiana
Se verifica daca toate elementele digonale sunt pozitiveSe ıncearca cu Cholesky; daca se termina cu succes se rezolva prinsubstitutie
4 Daca A este Hessenberg , se reduce la o matrice triunghiulara superiorsi apoi se rezolva prin substitutie inversa
5 Daca A este patratica, se factorizeaza PA = LU si se rezolva prinsubstitutie inversa
6 Daca A nu este patratica, se face factorizare QR cu metodaHouseholder, si se rezolva problema de aproximare ın sensul celor maimici patrate
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 32 / 42
Page 43
Backslash ın MATLAB
Backslash ın MATLAB
x=A\b pentru A densa realizeaza urmatorii pasi
1 Daca A este triunghiulara superior sau inferior se rezolva prinsubstitutie inversa sau directa
2 Daca A este o permutare a unei matrice triunghiulare, se rezolva prinsubstitutie (utila pentru [L,U]=lu(A) caci L este permutata)
3 Daca A este simetrica sau hermitiana
Se verifica daca toate elementele digonale sunt pozitiveSe ıncearca cu Cholesky; daca se termina cu succes se rezolva prinsubstitutie
4 Daca A este Hessenberg , se reduce la o matrice triunghiulara superiorsi apoi se rezolva prin substitutie inversa
5 Daca A este patratica, se factorizeaza PA = LU si se rezolva prinsubstitutie inversa
6 Daca A nu este patratica, se face factorizare QR cu metodaHouseholder, si se rezolva problema de aproximare ın sensul celor maimici patrate
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 32 / 42
Page 44
Backslash ın MATLAB
Backslash ın MATLAB
x=A\b pentru A densa realizeaza urmatorii pasi
1 Daca A este triunghiulara superior sau inferior se rezolva prinsubstitutie inversa sau directa
2 Daca A este o permutare a unei matrice triunghiulare, se rezolva prinsubstitutie (utila pentru [L,U]=lu(A) caci L este permutata)
3 Daca A este simetrica sau hermitiana
Se verifica daca toate elementele digonale sunt pozitiveSe ıncearca cu Cholesky; daca se termina cu succes se rezolva prinsubstitutie
4 Daca A este Hessenberg , se reduce la o matrice triunghiulara superiorsi apoi se rezolva prin substitutie inversa
5 Daca A este patratica, se factorizeaza PA = LU si se rezolva prinsubstitutie inversa
6 Daca A nu este patratica, se face factorizare QR cu metodaHouseholder, si se rezolva problema de aproximare ın sensul celor maimici patrate
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 32 / 42
Page 45
Backslash ın MATLAB
Backslash ın MATLAB
x=A\b pentru A densa realizeaza urmatorii pasi
1 Daca A este triunghiulara superior sau inferior se rezolva prinsubstitutie inversa sau directa
2 Daca A este o permutare a unei matrice triunghiulare, se rezolva prinsubstitutie (utila pentru [L,U]=lu(A) caci L este permutata)
3 Daca A este simetrica sau hermitiana
Se verifica daca toate elementele digonale sunt pozitive
Se ıncearca cu Cholesky; daca se termina cu succes se rezolva prinsubstitutie
4 Daca A este Hessenberg , se reduce la o matrice triunghiulara superiorsi apoi se rezolva prin substitutie inversa
5 Daca A este patratica, se factorizeaza PA = LU si se rezolva prinsubstitutie inversa
6 Daca A nu este patratica, se face factorizare QR cu metodaHouseholder, si se rezolva problema de aproximare ın sensul celor maimici patrate
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 32 / 42
Page 46
Backslash ın MATLAB
Backslash ın MATLAB
x=A\b pentru A densa realizeaza urmatorii pasi
1 Daca A este triunghiulara superior sau inferior se rezolva prinsubstitutie inversa sau directa
2 Daca A este o permutare a unei matrice triunghiulare, se rezolva prinsubstitutie (utila pentru [L,U]=lu(A) caci L este permutata)
3 Daca A este simetrica sau hermitiana
Se verifica daca toate elementele digonale sunt pozitiveSe ıncearca cu Cholesky; daca se termina cu succes se rezolva prinsubstitutie
4 Daca A este Hessenberg , se reduce la o matrice triunghiulara superiorsi apoi se rezolva prin substitutie inversa
5 Daca A este patratica, se factorizeaza PA = LU si se rezolva prinsubstitutie inversa
6 Daca A nu este patratica, se face factorizare QR cu metodaHouseholder, si se rezolva problema de aproximare ın sensul celor maimici patrate
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 32 / 42
Page 47
Backslash ın MATLAB
Backslash ın MATLAB
x=A\b pentru A densa realizeaza urmatorii pasi
1 Daca A este triunghiulara superior sau inferior se rezolva prinsubstitutie inversa sau directa
2 Daca A este o permutare a unei matrice triunghiulare, se rezolva prinsubstitutie (utila pentru [L,U]=lu(A) caci L este permutata)
3 Daca A este simetrica sau hermitiana
Se verifica daca toate elementele digonale sunt pozitiveSe ıncearca cu Cholesky; daca se termina cu succes se rezolva prinsubstitutie
4 Daca A este Hessenberg , se reduce la o matrice triunghiulara superiorsi apoi se rezolva prin substitutie inversa
5 Daca A este patratica, se factorizeaza PA = LU si se rezolva prinsubstitutie inversa
6 Daca A nu este patratica, se face factorizare QR cu metodaHouseholder, si se rezolva problema de aproximare ın sensul celor maimici patrate
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 32 / 42
Page 48
Backslash ın MATLAB
Backslash ın MATLAB
x=A\b pentru A densa realizeaza urmatorii pasi
1 Daca A este triunghiulara superior sau inferior se rezolva prinsubstitutie inversa sau directa
2 Daca A este o permutare a unei matrice triunghiulare, se rezolva prinsubstitutie (utila pentru [L,U]=lu(A) caci L este permutata)
3 Daca A este simetrica sau hermitiana
Se verifica daca toate elementele digonale sunt pozitiveSe ıncearca cu Cholesky; daca se termina cu succes se rezolva prinsubstitutie
4 Daca A este Hessenberg , se reduce la o matrice triunghiulara superiorsi apoi se rezolva prin substitutie inversa
5 Daca A este patratica, se factorizeaza PA = LU si se rezolva prinsubstitutie inversa
6 Daca A nu este patratica, se face factorizare QR cu metodaHouseholder, si se rezolva problema de aproximare ın sensul celor maimici patrate
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 32 / 42
Page 49
Backslash ın MATLAB
Backslash ın MATLAB
x=A\b pentru A densa realizeaza urmatorii pasi
1 Daca A este triunghiulara superior sau inferior se rezolva prinsubstitutie inversa sau directa
2 Daca A este o permutare a unei matrice triunghiulare, se rezolva prinsubstitutie (utila pentru [L,U]=lu(A) caci L este permutata)
3 Daca A este simetrica sau hermitiana
Se verifica daca toate elementele digonale sunt pozitiveSe ıncearca cu Cholesky; daca se termina cu succes se rezolva prinsubstitutie
4 Daca A este Hessenberg , se reduce la o matrice triunghiulara superiorsi apoi se rezolva prin substitutie inversa
5 Daca A este patratica, se factorizeaza PA = LU si se rezolva prinsubstitutie inversa
6 Daca A nu este patratica, se face factorizare QR cu metodaHouseholder, si se rezolva problema de aproximare ın sensul celor maimici patrate
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 32 / 42
Page 50
Descompunere QR
Descompunere QR
Fie A ∈ Cm×n. Se numeste descompunere QR a lui A perechea dematrice (Q, R) unde Q ∈ Cm×n este unitara, R ∈ Cn×n estetriunghiulara superior si A = QR.
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 33 / 42
Page 51
Descompunere QR Metoda lui Householder
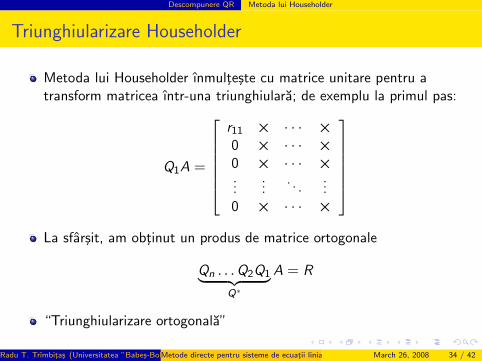
Triunghiularizare Householder
Metoda lui Householder ınmulteste cu matrice unitare pentru atransform matricea ıntr-una triunghiulara; de exemplu la primul pas:
Q1A =
r11 × · · · ×0 × · · · ×0 × · · · ×...
.... . .
...0 × · · · ×
La sfarsit, am obtinut un produs de matrice ortogonale
Qn . . . Q2Q1︸ ︷︷ ︸Q∗
A = R
“Triunghiularizare ortogonala”
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 34 / 42
Page 52
Introducerea de zerouri
Introducerea de zerouri
Qk introduce zerouri sub diagonala ın coloana k
Pastreaza zerourile introduse anterior× × ×× × ×× × ×× × ×× × ×
A
Q1−→
× × ×0 × ×0 × ×0 × ×0 × ×
Q1A
Q2−→
× × ×
× ×0 ×0 ×0 ×
Q2Q1A
Q3−→
× × ×× ×
×00
Q3Q2Q1A
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 35 / 42
Page 53
Reflectori Householder
Reflectori Householder
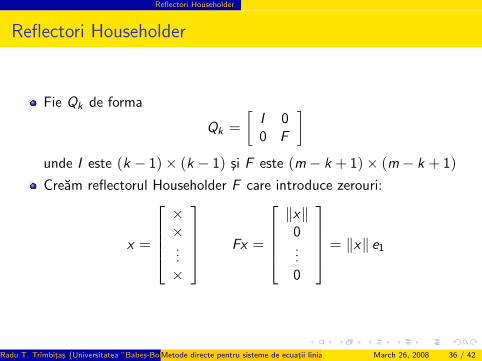
Fie Qk de forma
Qk =[
I 00 F
]unde I este (k − 1)× (k − 1) si F este (m− k + 1)× (m− k + 1)Cream reflectorul Householder F care introduce zerouri:
x =
××...×
Fx =
‖x‖
0...0
= ‖x‖ e1
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 36 / 42
Page 54
Reflectori Householder-Ideea
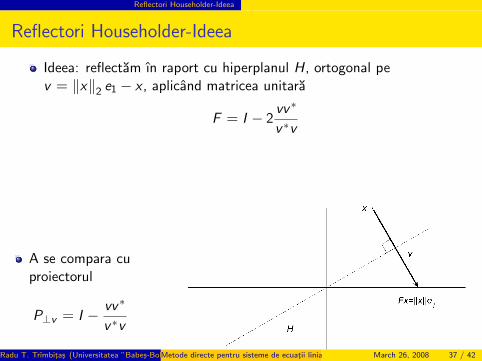
Reflectori Householder-Ideea
Ideea: reflectam ın raport cu hiperplanul H, ortogonal pev = ‖x‖2 e1 − x , aplicand matricea unitara
F = I − 2vv ∗
v ∗v
A se compara cuproiectorul
P⊥v = I − vv ∗
v ∗v
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 37 / 42
Page 55
Alegerea reflectorului
Alegerea reflectorului
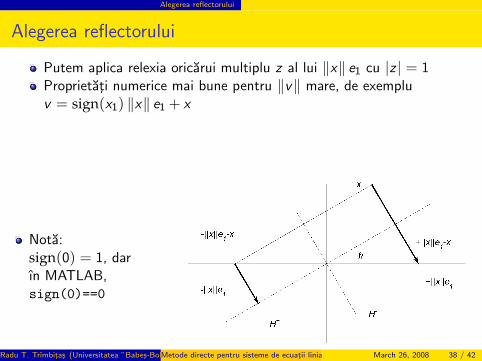
Putem aplica relexia oricarui multiplu z al lui ‖x‖ e1 cu |z | = 1Proprietati numerice mai bune pentru ‖v‖ mare, de exempluv = sign(x1) ‖x‖ e1 + x
Nota:sign(0) = 1, darın MATLAB,sign(0)==0
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 38 / 42
Page 56
Algoritmul lui Householder
Algoritmul lui Householder
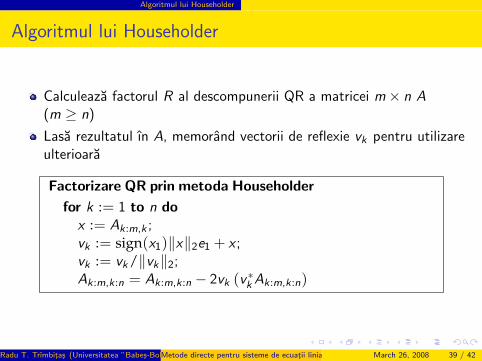
Calculeaza factorul R al descompunerii QR a matricei m× n A(m ≥ n)
Lasa rezultatul ın A, memorand vectorii de reflexie vk pentru utilizareulterioara
Factorizare QR prin metoda Householder
for k := 1 to n dox := Ak :m,k ;vk := sign(x1)‖x‖2e1 + x ;vk := vk/‖vk‖2;Ak :m,k :n = Ak :m,k :n − 2vk (v ∗k Ak :m,k :n)
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 39 / 42
Page 57
Aplicarea sau obtinerea lui Q
Aplicarea sau obtinerea lui Q
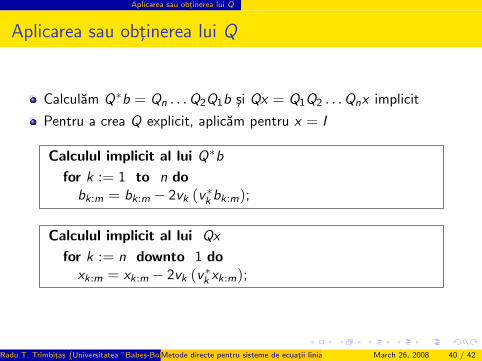
Calculam Q∗b = Qn . . . Q2Q1b si Qx = Q1Q2 . . . Qnx implicit
Pentru a crea Q explicit, aplicam pentru x = I
Calculul implicit al lui Q∗b
for k := 1 to n dobk :m = bk :m − 2vk (v ∗k bk :m);
Calculul implicit al lui Qx
for k := n downto 1 doxk :m = xk :m − 2vk (v ∗k xk :m);
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 40 / 42
Page 58
Complexitatea -Householder QR
Complexitatea -Householder QR
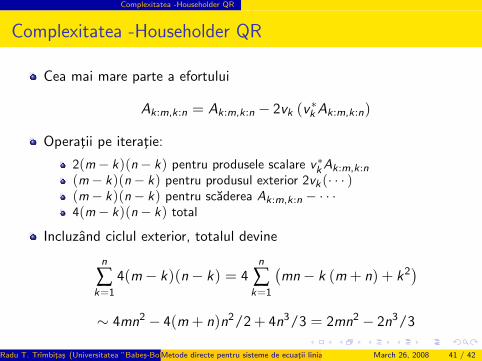
Cea mai mare parte a efortului
Ak :m,k :n = Ak :m,k :n − 2vk (v ∗k Ak :m,k :n)
Operatii pe iteratie:
2(m− k)(n− k) pentru produsele scalare v∗k Ak :m,k :n(m− k)(n− k) pentru produsul exterior 2vk (· · · )(m− k)(n− k) pentru scaderea Ak :m,k :n − · · ·4(m− k)(n− k) total
Incluzand ciclul exterior, totalul devine
n
∑k=1
4(m− k)(n− k) = 4n
∑k=1
(mn− k (m + n) + k2
)∼ 4mn2 − 4(m + n)n2/2 + 4n3/3 = 2mn2 − 2n3/3
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 41 / 42
Page 59
Complexitatea -Householder QR
Figure: Alston S. Householder(1904-1993), matematicianamerican. Contributii importante:biologie mtematica, algebraliniara numerica. Cartea sa ”Thetheory of matrices in numericalanalysis” a avut un mare impactasupra dezvoltarii analizeinumerice si a informaticii.
Figure: James Wallace Givens(1910-1993) Pionier al algebreiliniare numerice si informaticii
Radu T. Trımbitas (Universitatea ”Babes-Bolyai” )Metode directe pentru sisteme de ecuatii liniare March 26, 2008 42 / 42