Introduction EnKF Overview Proposed Methodology Example Ensemble Kalman Filtering in Distance-Kernel Space Kwangwon Park and Jef Caers Department of Energy Resources Engineering Stanford University May 8, 2008 K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Transcript
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Ensemble Kalman Filteringin Distance-Kernel Space
Kwangwon Park and Jef Caers
Department of Energy Resources EngineeringStanford University
May 8, 2008
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
In the previous presentation (Caers, 2008),How to generate new realizations with a given set of realizations in distance-kernel space
A new set of realizations which satisfy geologic informationand static data has been generated in distance-kernel space.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
In this presentation, ...Objectives
Generate multiple realizations satisfying dynamic data
Preserve geologic information
Joint conditioning to static and dynamic data
Simultaneous generation of multiple realizations
Efficient optimization for multiple solutions
Find multiple x’s such that o(x) = do(x): result calculated by forward solution
d: dynamic data observed from a field
ex) 4D seismic, BHP, OPR, WPR, WCT,...
x = o−1(d) is a highly nonlinear inverse problem
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Outline
1 Introduction
2 EnKF Overview
3 Proposed Methodology
4 ExamplePrior and posterior densityEnsemble size reduction
5 Summary
6 Future works
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
’Dynamic data conditioning’ = Optimization problemImpossible to evaluate ϕ−1(d) explicitly
Minimize the difference between the observed and the calculated
xopt = argminx
∆ (1)
∆(x; d) = ‖d− o(x)‖ (2)
However, if x represents a reservoir model,
1 (xopt) consistent with geologic information and static data
2 (x) high dimensional
3 (∆) multiple local minima and non-unique solution
4 (o(x)) time-consuming forward simulation
5 (argminx ∆) One optimal solution per one optimization
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
’Dynamic data conditioning’ = Optimization problemImpossible to evaluate ϕ−1(d) explicitly
Minimize the difference between the observed and the calculated
xopt = argminx
∆ (1)
∆(x; d) = ‖d− o(x)‖ (2)
However, if x represents a reservoir model,
1 (xopt) consistent with geologic information and static data
2 (x) high dimensional
3 (∆) multiple local minima and non-unique solution
4 (o(x)) time-consuming forward simulation
5 (argminx ∆) One optimal solution per one optimization
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
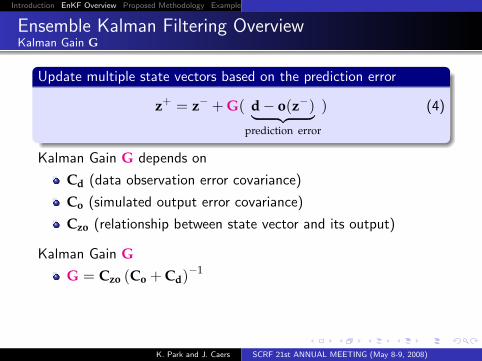
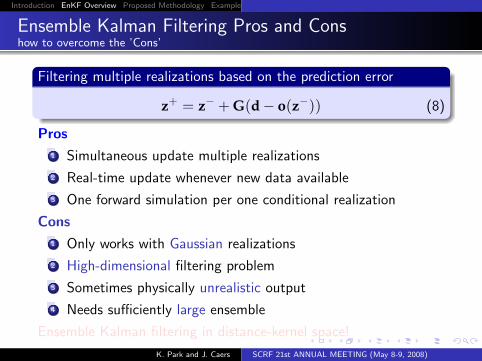
Ensemble Kalman Filtering Pros and Conshow to overcome the ’Cons’
Filtering multiple realizations based on the prediction error
z+ = z− + G(d− o(z−)) (8)
Pros
1 Simultaneous update multiple realizations
2 Real-time update whenever new data available
3 One forward simulation per one conditional realization
Cons
1 Only works with Gaussian realizations
2 High-dimensional filtering problem
3 Sometimes physically unrealistic output
4 Needs sufficiently large ensemble
Ensemble Kalman filtering in distance-kernel space!
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
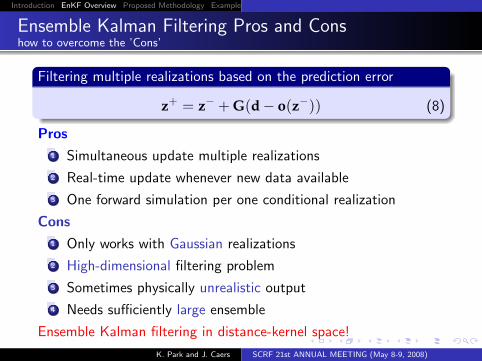
Ensemble Kalman Filtering Pros and Conshow to overcome the ’Cons’
Filtering multiple realizations based on the prediction error
z+ = z− + G(d− o(z−)) (8)
Pros
1 Simultaneous update multiple realizations
2 Real-time update whenever new data available
3 One forward simulation per one conditional realization
Cons
1 Only works with Gaussian realizations
2 High-dimensional filtering problem
3 Sometimes physically unrealistic output
4 Needs sufficiently large ensemble
Ensemble Kalman filtering in distance-kernel space!
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Outline
1 Introduction
2 EnKF Overview
3 Proposed Methodology
4 ExamplePrior and posterior densityEnsemble size reduction
5 Summary
6 Future works
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Ensemble Kalman Filtering in Distance-Kernel Spaceovercomes the ’Cons’ of the conventional EnKF
Do KL expansion of z into y in distance-kernel space!
z =(
xp(x)
)→(
y)
(9)
y always standard Gaussian → (non-Gaussian x applicable!)
y’s are assigned to all x’s by KL expansionEnKF updates y’s rather than x’sFind new x’s from the new y’s through the pre-image problem.
y much shorter than x → (low dimensionality!)
x’s are of 106 to 108 dimensiony’s are of 10 to 103 dimensionFast and stable filtering
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Ensemble Kalman Filtering in Distance-Kernel Spaceovercomes the ’Cons’ of the conventional EnKF
Do KL expansion of z into y in distance-kernel space!
z =(
xp(x)
)→(
y)
(10)
Single y represents both x and p(x) →(physically realistic and consistent update!)
Solve the pre-image problem for x’s from the new y’sSolve the pre-image problem for p(x)’s from the same y’sUpdate x and p(x) in a consistent wayConventional EnKF updates x and p(x) independently.
The size of ensemble reduced by kernel-kmean clustering →(increased efficiency!)
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
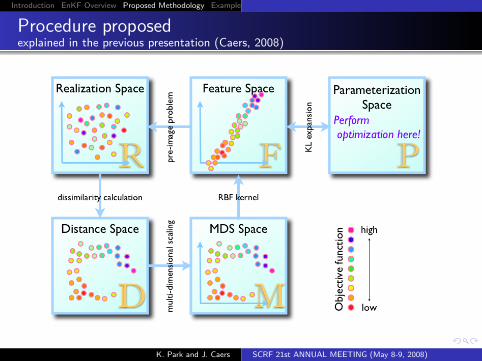
Procedure proposedexplained in the previous presentation (Caers, 2008)
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Outline
1 Introduction
2 EnKF Overview
3 Proposed Methodology
4 ExamplePrior and posterior densityEnsemble size reduction
5 Summary
6 Future works
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Given informationDetermine reservoir permeability with given information
Geology: Spherical variogram (NE50, r1 = 200 ft, r2 = 50 ft)Static data: 150 md at well locations (5,5) and (28,28)Dynamic data: qw/qt measured every 2 months (10% noise)
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
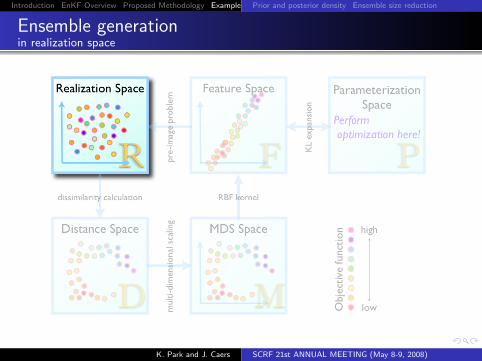
Ensemble generationin realization space
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
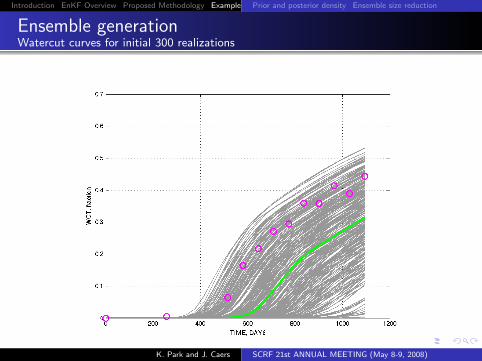
Ensemble generation300 SGSIM realizations conditioned to hard data (150 md at (5,5) and (28,28))
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Ensemble generationInitial mean and variance
Figure: Initial mean Figure: Initial variance
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Ensemble generationWatercut curves for initial 300 realizations
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
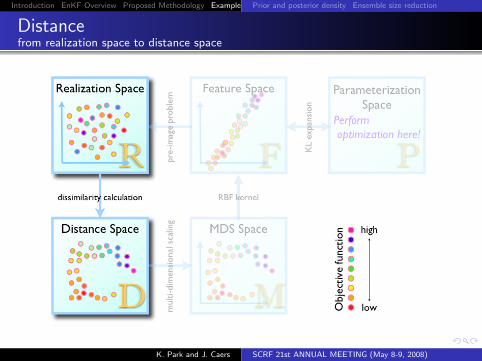
Distancefrom realization space to distance space
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Connectivity distance btw any two realizationsConnectivity distance: difference in analytical watercut curves
Figure: On the y-axis is the dissimilarity in dynamic data of any tworealization. On the x-axis the connectivity distance between any tworealizations.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
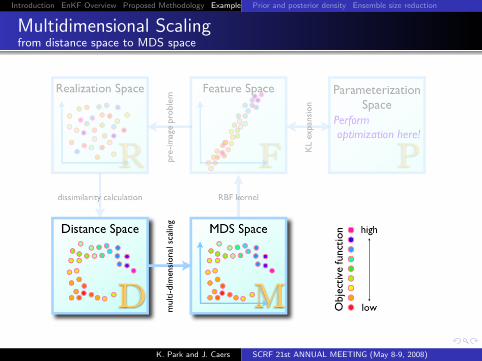
Multidimensional Scalingfrom distance space to MDS space
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Multidimensional Scaling2D MDS space based on connectivity distance
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Ensemble Kalman Filteringin parameterization space
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
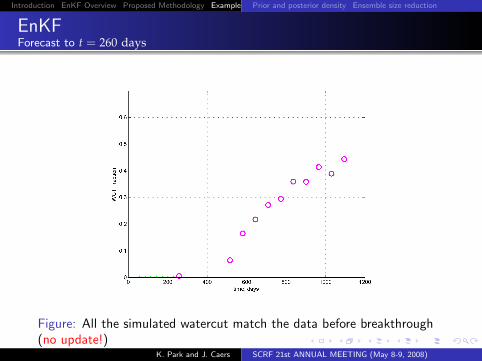
EnKFForecast to t = 260 days
Figure: All the simulated watercut match the data before breakthrough(no update!)
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
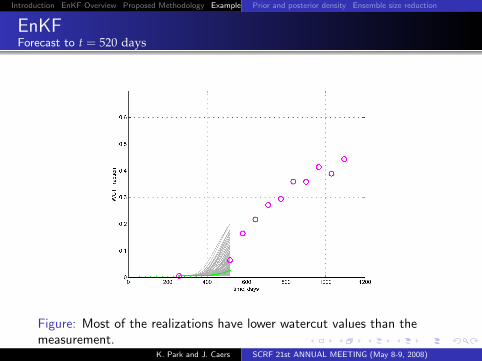
EnKFForecast to t = 520 days
Figure: Most of the realizations have lower watercut values than themeasurement.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
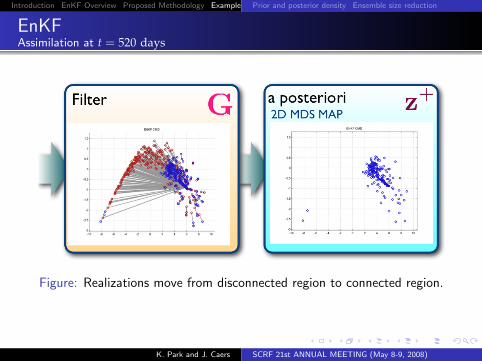
EnKFAssimilation at t = 520 days
Figure: Realizations move from disconnected region to connected region.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
EnKFAssimilation at t = 520 days
Figure: Realizations move from disconnected region to connected region.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
EnKFForecast to t = 580 days
Figure: Most of the realizations show lower watercut values than thedata.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
EnKFAssimilation at t = 580 days
Figure: Realizations move toward a particular point.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
EnKFAssimilation at t = 580 days
Figure: Realizations move toward a particular point.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
EnKFFinal realizations
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
EnKFFinal mean and variance
Figure: Final mean Figure: Final variance
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
EnKFPrediction with final 300 realizations
Figure: Final Figure: Initial
Final realizations match the data within the error level (10%).
For 300 history-matched models, exactly 300 forwardsimulations required.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Outline
1 Introduction
2 EnKF Overview
3 Proposed Methodology
4 ExamplePrior and posterior densityEnsemble size reduction
5 Summary
6 Future works
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Analyze probability densityPrior probability density of unconditional realizations
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
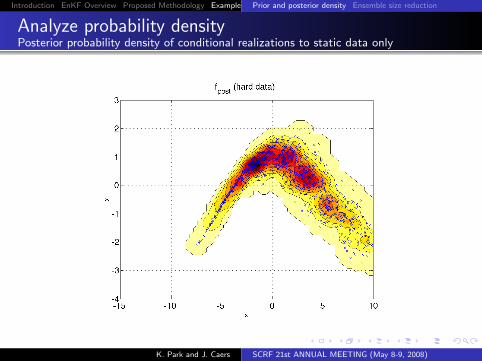
Analyze probability densityPosterior probability density of conditional realizations to static data only
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
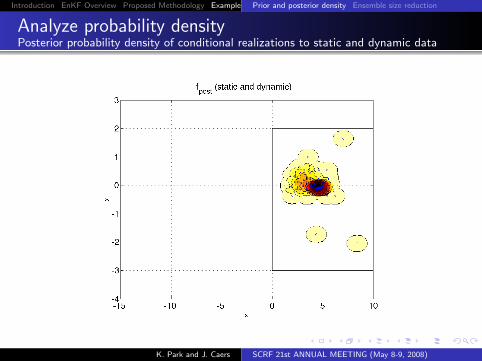
Analyze probability densityPosterior probability density of conditional realizations to static and dynamic data
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Outline
1 Introduction
2 EnKF Overview
3 Proposed Methodology
4 ExamplePrior and posterior densityEnsemble size reduction
5 Summary
6 Future works
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
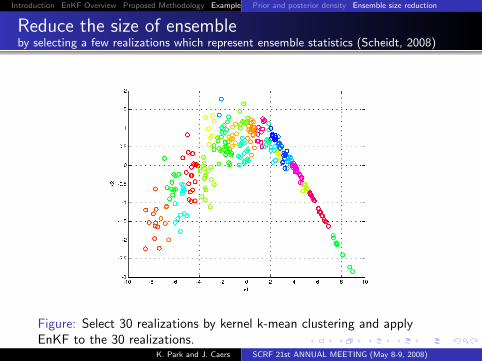
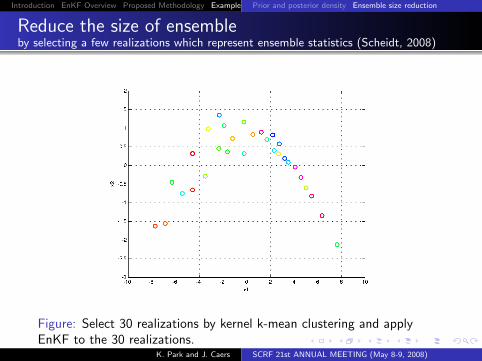
Reduce the size of ensembleby selecting a few realizations which represent ensemble statistics (Scheidt, 2008)
Figure: Select 30 realizations by kernel k-mean clustering and applyEnKF to the 30 realizations.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Reduce the size of ensembleby selecting a few realizations which represent ensemble statistics (Scheidt, 2008)
Figure: Select 30 realizations by kernel k-mean clustering and applyEnKF to the 30 realizations.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Prior to EnKFEnsemble statistics reproduction
Figure: 30 realizations Figure: 300 realizations
30 realizations selected by kernel k-mean clustering representthe ensemble (300 realizations) statistics (p10, p50, and p90).
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
Prior to EnKFEnsemble statistics reproduction
Figure: 30 realizations Figure: Comparison
30 realizations selected by kernel k-mean clustering representthe ensemble (300 realizations) statistics (p10, p50, and p90).
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future worksPrior and posterior density Ensemble size reduction
After EnKFPrediction with final 30 realizations
Figure: 30 realizations Figure: 300 realizations
30 realizations represent the ensemble (300 reals) statistics.To get 30 history-matched models, only need 30 forwardsimulations.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Outline
1 Introduction
2 EnKF Overview
3 Proposed Methodology
4 ExamplePrior and posterior densityEnsemble size reduction
5 Summary
6 Future works
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Summary
Objective
Generate multiple realizations satisfying all available static and dy-namic data
EnKF in distance-kernel space
updates multiple realizations to dynamic data simultaneously.
is applied to any type of geologic model including Gaussian.
is boosted when the size of ensemble reduced by selection ofkernel k-mean clustering.
MDS space is very useful to analyze the optimization processas well as the probability density.
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Outline
1 Introduction
2 EnKF Overview
3 Proposed Methodology
4 ExamplePrior and posterior densityEnsemble size reduction
5 Summary
6 Future works
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)
Introduction EnKF Overview Proposed Methodology Example Summary Future works
Future works
Implementation
Extend to non-Gaussian case (e.g. multiple-point Geostatistics)
Application
Apply to 3D real case (Brugge data set)
K. Park and J. Caers SCRF 21st ANNUAL MEETING (May 8-9, 2008)