Page 1
ESA living planet symposium 2010
ESA living planet symposium28 June – 2 July 2010, Bergen, Norway
GOCE data analysis:realization of the invariants approach
in a high performance computing environment
Oliver Baur, Nico Sneeuw, Jianqing Cai, Matthias Roth
Institute of GeodesyUniversity of Stuttgart
Page 2
ESA living planet symposium 2010
Outline
GOCE gradiometry
Invariants representation
Linearization
Synthesis of unobserved GGs
Stochastic model
High performance computing
Summary
Page 3
ESA living planet symposium 2010
2V
V2
... observation tensor
... gravitational tensor
... centrifugal tensor
... Euler tensor
separation of centrifugal and Euler effects
(star tracker, gradiometer)
GOCE gradiometry
0, 332211
332313
232212
131211
VVV
VVV
VVV
VVV
VijV
gravitational gradients
satellite
Page 4
ESA living planet symposium 2010
z
y
x
0
p1,x
p1,z
p2,x
p1,yp2,y
p2,z
high-sensitive axes accuracy: 10-12 m s-2
low-sensitive axes accuracy: 10-9 m s-2
ES
A-A
OES
Med
iala
b
high-accurate determination of 13332211 ,,, VVVV
GOCE gradiometry
Page 5
ESA living planet symposium 2010
M2e0
*0standard approach:
observations: Vij
gradiometer orientation essential (tensor transformation)
alternative approach:
observations: J = J{V} = J{Vij}
no orientation information required
rotational invariants
gradiometer frame (GRF)
model frame (LNOF)
}0|,,{ *G3
G2
G1 eee
}0|,,{ M3
M2
M1 eee
M3e
M1e
G2e
G3e
G1e
Invariants representation
Page 6
ESA living planet symposium 2010
system I
Vtr 1 J
22 tr VJ
33 tr VJ
system II
Vtr 1 I
222 tr -)tr (5,0 VVI
Vdet 3 I
system III
1
2
3
Waring formula
Newton-Girard formula
characteristic equation
0322
13 III
0) det()( 3 IVp
Invariants representation
rotational invariant
complete system (minimal basis) consists of three independentinvariants
}{J}{J MG VV
Page 7
ESA living planet symposium 2010
invariants system of a symmetric, trace-free second-order tensor in 3
2
12332
13222
23112313123322113
223
213
212
233
222
2112
1
2
2
1
0
VVVVVVVVVVVVI
VVVVVVI
I
analysis of I1 provides the trivial solution ( constraints) non-linear gravity field functionals gravitational gradients products mixing of gravitational gradients
Invariants representation
Page 8
ESA living planet symposium 2010
Invariants representation
reference gravitational gradients in the GRF
reference invariants
Page 9
ESA living planet symposium 2010
pros and cons of the gravitational gradients tensor invariants approach
Invariants representation
pros
scalar-valued functionals
independent of the gradiometer orientation in space
independent of the orientation accuracy
independent of reference frame rotations / parameterization
cons
non-linear observables
gravitational gradients required with compatible accuracy (full tensor gradiometry)
huge computational costs, iterative parameter estimation
stochastic model of invariants
Page 10
ESA living planet symposium 2010
Invariants representation
pros
scalar-valued functionals
independent of the gradiometer orientation in space
independent of the orientation accuracy
independent of reference frame rotations / parameterization
cons
non-linear observables
gravitational gradients required with compatible accuracy (full tensor gradiometry)
huge computational costs, iterative parameter estimation
stochastic model of invariants
pros and cons of the gravitational gradients tensor invariants approach
linearization
high performance computing
error propagation
synthesis of inaccurate gravitational gradients
Page 11
ESA living planet symposium 2010
L
l
l
mlmlmij
s,c;r,,fr,,V0 0
)()(
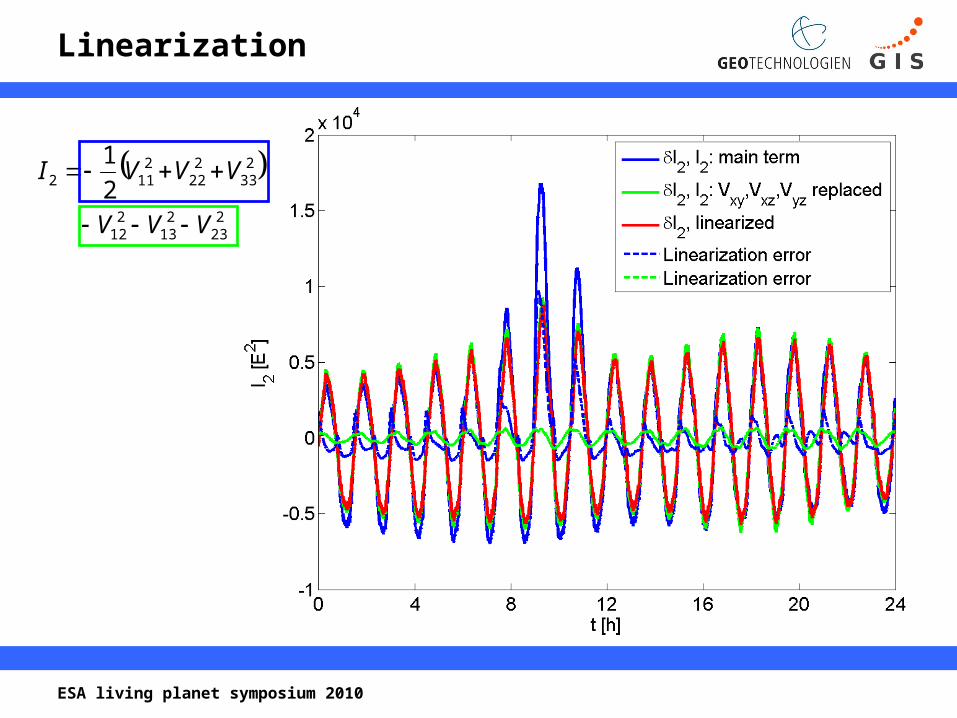
22112 jiji VVI
gravitational gradients:
invariants:
3322113 jijiji VVVI
linearization (calculation of perturbations): Vij= Uij+Tij
)(
)(2 2
232313131212
333322221111ref222
ijT
TUTUTU
TUTUTUIII
additional effort (per iteration): synthesis of Uij up to LL ref
Linearization
Page 12
ESA living planet symposium 2010
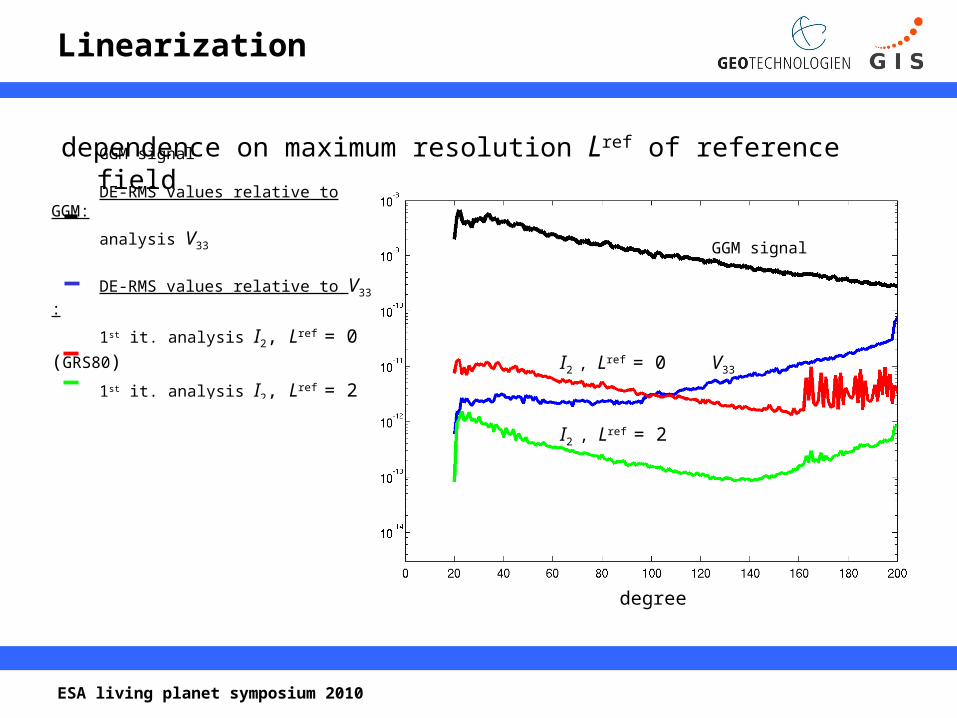
dependence on maximum resolution Lref of reference field
GGM signal
DE-RMS values relative to GGM:
analysis V33
DE-RMS values relative to V33 :
1st it. analysis I2, Lref = 0 (GRS80)
1st it. analysis I2, Lref = 2 (GRS80)
1st it. analysis I2, Lref = 200 (OSU86F)
2nd it. analysis I2
3rd it. analysis I2
degree
Linearization
V33
GGM signal
Page 13
ESA living planet symposium 2010
degree
Linearization
GGM signal
DE-RMS values relative to GGM:
analysis V33
DE-RMS values relative to V33 :
1st it. analysis I2, Lref = 0 (GRS80)
1st it. analysis I2, Lref = 2 (GRS80)
1st it. analysis I2, Lref = 200 (OSU86F)
2nd it. analysis I2
3rd it. analysis I2
V33 I2 , Lref = 0
GGM signal
dependence on maximum resolution Lref of reference field
Page 14
ESA living planet symposium 2010
degree
Linearization
GGM signal
DE-RMS values relative to GGM:
analysis V33
DE-RMS values relative to V33 :
1st it. analysis I2, Lref = 0 (GRS80)
1st it. analysis I2, Lref = 2 (GRS80)
1st it. analysis I2, Lref = 200 (OSU86F)
2nd it. analysis I2
3rd it. analysis I2
V33 I2 , Lref = 0
I2 , Lref = 2
GGM signal
dependence on maximum resolution Lref of reference field
Page 15
ESA living planet symposium 2010
degree
Linearization
GGM signal
DE-RMS values relative to GGM:
analysis V33
DE-RMS values relative to V33 :
1st it. analysis I2, Lref = 0 (GRS80)
1st it. analysis I2, Lref = 2 (GRS80)
1st it. analysis I2, Lref = 200 (OSU86F)
2nd it. analysis I2
3rd it. analysis I2
V33 I2 , Lref = 0
I2 , Lref = 2
I2 , Lref = 200
GGM signal
dependence on maximum resolution Lref of reference field
Page 16
ESA living planet symposium 2010
degree
Linearization
GGM signal
DE-RMS values relative to GGM:
analysis V33
DE-RMS values relative to V33 :
1st it. analysis I2, Lref = 0 (GRS80)
1st it. analysis I2, Lref = 2 (GRS80)
1st it. analysis I2, Lref = 200 (OSU86F)
2nd it. analysis I2
3rd it. analysis I2
V33 I2 , Lref = 0
I2 , Lref = 2
I2 , Lref = 200
2nd iteration
GGM signal
dependence on maximum resolution Lref of reference field
Page 17
ESA living planet symposium 2010
degree
V33 I2 , Lref = 0
I2 , Lref = 2
I2 , Lref = 200
Linearization
GGM signal
DE-RMS values relative to GGM:
analysis V33
DE-RMS values relative to V33 :
1st it. analysis I2, Lref = 0 (GRS80)
1st it. analysis I2, Lref = 2 (GRS80)
1st it. analysis I2, Lref = 200 (OSU86F)
2nd it. analysis I2
3rd it. analysis I2
2nd, 3rd iteration
GGM signal
dependence on maximum resolution Lref of reference field
conclusions small linearization error fast convergence numerically efficient insensitive towards linearization field
Page 18
ESA living planet symposium 2010
invariants representation requires the GGs with compatible accuracy (full tensor gradiometry)
GOCE: V12 and V23 highly reduced in accuracy
synthetic calculation of inaccurate GGs (forward modeling)
avoid a priori information to leak into gravity field estimate
minor influence
additional effort (per iteration): synthesis of V12 and V23
Synthesis of unobserved GGs
3322112312 ,,, VVVVV
Page 19
ESA living planet symposium 2010
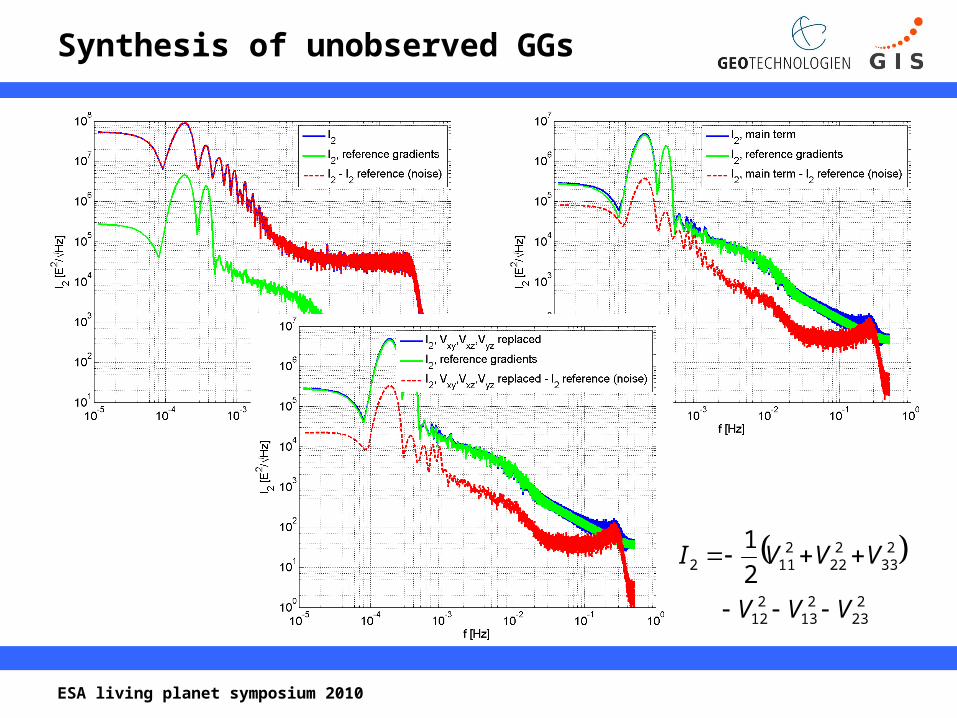
Synthesis of unobserved GGs
2
1
223
213
212
233
222
2112
VVV
VVVI
Page 20
ESA living planet symposium 2010
Synthesis of unobserved GGs
2
1
223
213
212
233
222
2112
VVV
VVVI
Page 21
ESA living planet symposium 2010
degree
V33
I2 , full tensor
GGM signal
GGM signal
DE-RMS values relative to GGM:
analysis V33
DE-RMS values relative to V33 :
2nd it. analysis I2
1st it. analyse I2 , Syn. 1. It.: -
2. it. analyse I2 , Syn. 1. It.: -
1. it. analyse I2 , Syn. 1. It.: OSU86F
2. it. analyse I2 , Syn. 1. It.: OSU86F
Synthesis of unobserved GGs
impact of GGs synthesis on the estimation of geopotential parameters
Page 22
ESA living planet symposium 2010
GGM signal
DE-RMS values relative to GGM:
analysis V33
DE-RMS values relative to V33 :
2nd it. analysis I2
1st it. analysis I2 , syn. 1st it.: -
2nd it. analysis I2 , syn. 1st it.: -
1. It. Analyse I2 , Syn. 1. It.: OSU86F
2. It. Analyse I2 , Syn. 1. It.: OSU86F
degree
V33
I2 , full tensor
GGM signal
I2 , syn 1. It.: -
I2 , syn. 1. It.: -
Synthesis of unobserved GGs
impact of GGs synthesis on the estimation of geopotential parameters
conclusions full tensor
reconstructed no a priori
information needed no impact on overall convergence numerically efficient
Page 23
ESA living planet symposium 2010
Stochastic model
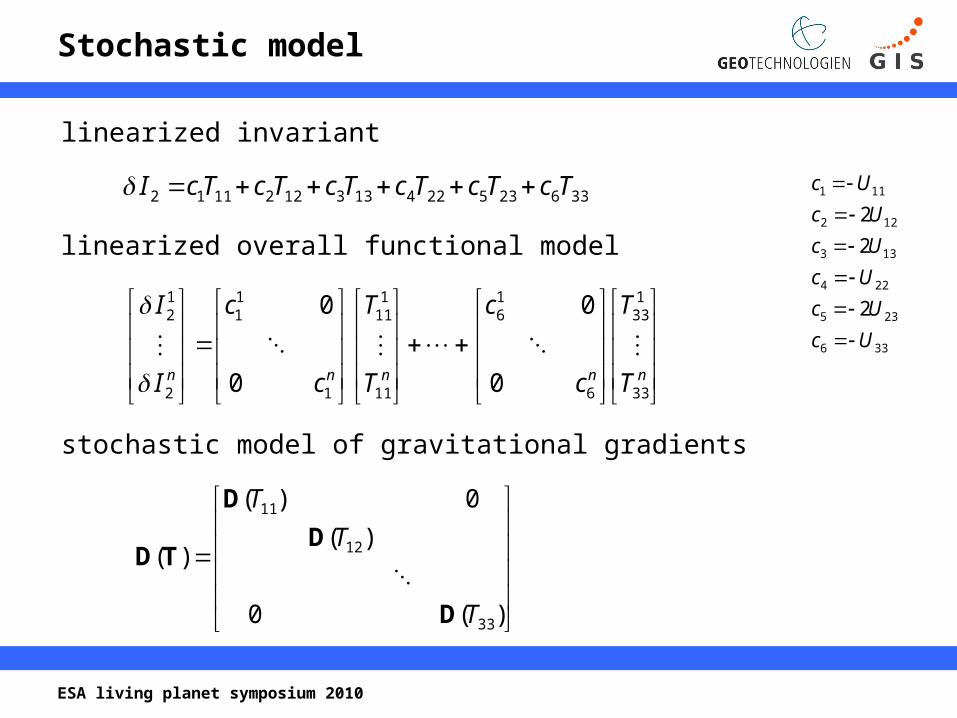
linearized invariant
3362352241331221112 TcTcTcTcTcTcI
336
235
224
133
122
111
2
2
2
Uc
Uc
Uc
Uc
Uc
Uc
linearized overall functional model
stochastic model of gravitational gradients
)(.
)(
)()()(
)(
33
12
3311121111
Tsym
T
,TT,TTT
D
D
CCD
TD
correlations neglected
nnnnn T
T
c
c
T
T
c
c
I
I
33
133
6
16
11
111
1
11
2
12
0
0
0
0
Page 24
ESA living planet symposium 2010
Stochastic model
)(0
)(
0)(
)(
33
12
11
T
T
T
D
D
D
TD
linearized invariant
3362352241331221112 TcTcTcTcTcTcI
336
235
224
133
122
111
2
2
2
Uc
Uc
Uc
Uc
Uc
Uc
linearized overall functional model
stochastic model of gravitational gradients
nnnnn T
T
c
c
T
T
c
c
I
I
33
133
6
16
11
111
1
11
2
12
0
0
0
0
Page 25
ESA living planet symposium 2010
Stochastic model
error propagation
TVV
TVV
VTVij
I
Tijij
)(...)()(
)()(
16
16
11
112
1
33331111
FJFJFJFJD
FFD
matrices of linear factors (Jacobian)
6,...,1,diag 1 kcc nkkk J
conclusion invariants variance-covariance matrix by products between
the (diagonal) matrices of linear factors andthe inverse gravitational gradients filter matrices
Page 26
ESA living planet symposium 2010
“brute-force” normal equations system “inversion”
splitting the computational effort on several CPUs
parallelization using OpenMP, MPI or OpenMP+MPI
computation platforms provided by the High Performance Computing Centre Stuttgart (HLRS)
NEC SX-9 (array processor)
12 nodes, 192 CPUs
TPP: 19.2 TFlops
High performance computing
Page 27
ESA living planet symposium 2010
High performance computing
shared memory systems
parallelization via OpenMP
block-wise design matrix assembly
successive normal equations system assembly
algebraic operations by BLAS routines
normal equations system “inversion” by Cholesky decomposition
LAPACK routines
Page 28
ESA living planet symposium 2010
High performance computing
distributed memory systems
parallelization via MPI
block-wise design matrix assembly
successive normal equations system assembly
block-cyclic data distribution
algebraic operations by PBLAS routines
normal equations system “inversion” by Cholesky decomposition
ScaLAPACK routines
Page 29
ESA living planet symposium 2010
High performance computing
# CPUs 1 4 8
design matrix assembly (%)
0.8 0.8 0.8
NES assmebly (%) 93.8 92.1 88.8
NES inversion (%) 1.5 3.4 6.8
speed-up (-) 1 3.8 7.2
good runtime scaling on shared memory architectures limited to ~8 CPUs
normal equations system assembly most time-consuming part
hybrid implementation established recently
design matrixassembly
NESassembly
totalruntime
conclusion parallelization performed successfully
Page 30
ESA living planet symposium 2010
the invariants approach is an independent alternative for SGG analysis to more conventional methods
independent of reference frame rotations and the gradiometer frame orientation in space
efficient linearization: small linearization error, fast convergence
full tensor gradiometry reconstruction by synthesis of unobserved gravitational gradients
approaches for the stochastic model handling of invariants
algorithms successfully implemented on high performance computing platforms
analysis of simulated GOCE data demonstrates the invariants approach to be a viable method for gravity field recovery
application on real data
Summary
Page 31
ESA living planet symposium 2010
invariants system of a symmetric second-order tensors in 3
V
VV
V
det 2
tr )tr (2
1
tr
21233
21322
223112313123322113
22223
213
2123322331122112
3322111
VVVVVVVVVVVVI
VVVVVVVVVI
VVVI
Invariants representation
Page 32
ESA living planet symposium 2010
Invariants representation
reference gravitational gradients in the GRF reference invariants
Page 33
ESA living planet symposium 2010
Invariants representation
reference gravitational gradients in the GRF reference invariants
Page 34
ESA living planet symposium 2010
Linearization
2
1
223
213
212
233
222
2112
VVV
VVVI
Page 35
ESA living planet symposium 2010
linearized observation equation
approximate solution x0
calculation of V12 and V23
calculation of invariants
solution of the linear system of equations
new estimate iii xxx ˆˆˆ 1
final solution:
i = i+1
truncation?yes
no
ix̂
Synthesis of unobserved GGs