ESEMS – BCU - AMEI For Tatian2 Tse-Liang Yeh 1 , Shyh-Biau Jiang 1 , Huey-Ching Yeh 2 , Jen-Yann Liu 2 , Ko-Ichiro Oyama 3 , Ying-Hao Hsu 1 , Li-Yet Liu 1 , Chung-Jen Chou 1 , Jia-Wei Jiang 1 , J i-Yi Peng 1 , Alexei D’mitriev 2 , Yoshihiro Kakinami 2 1 Institute of Opto-Mechatronics Engineering, National Central Univer sity (NCU-OME) 2 Institute of Space Science, National Central University (NCU-ISS) 3 Distinguished Visiting Scholar @ NCU-ISS 2007-2009 E ducational S cientific E xperiment M icro S atellite – A urora M agnetic field and E lectron energy distribution I nstruments – B lock of N ational C entral U niversity α n N = 98.8, T=101.3min, LT=8.9H R=7202km, H=830km, perigee=66.5 o , Eccentricity=.0 longitude of ascending=134 o , Rev/Day=14.2, Multiplicity=14d Illum.=74.5min zenith ram dir nadir
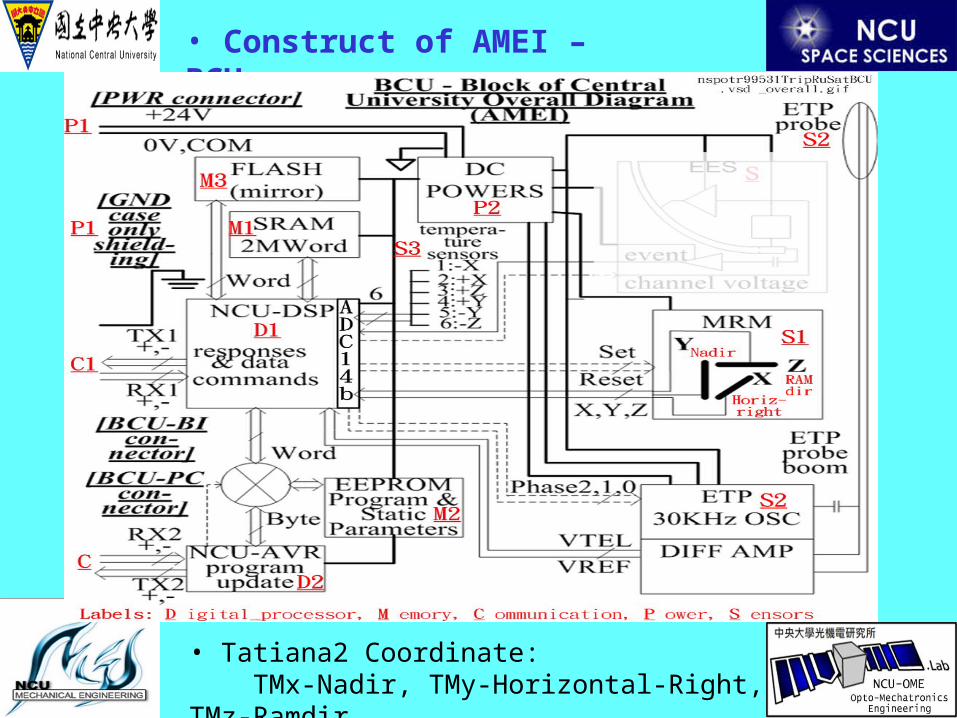
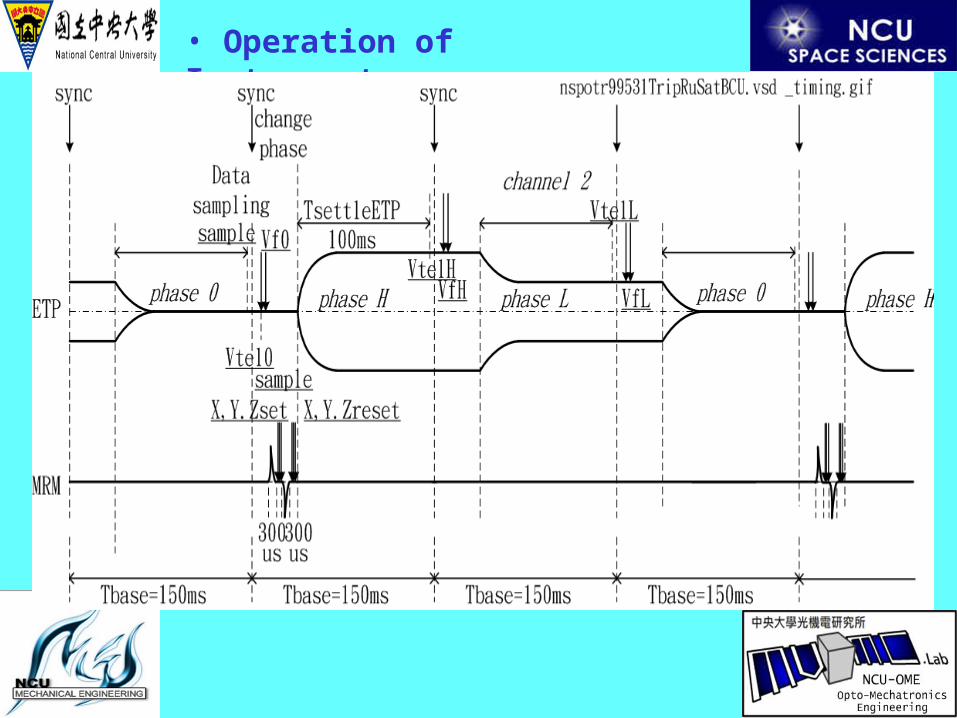
High Lights• Construct of AMEI – BCU• Operation of Instruments• Sensor Performance• Data Interface Commands• Development Procedural Experiences• In-Flight Data & Calibration • ConclusionTeam:
• Scientists Team:Subject Definition, Instrumentation Know How, Calibration, Data Interpretation• Engineering Team: Instrument Operation and Controls, System Architecture, Customization, Command and Data Interface, Survivability, Project Management, Data Parsing and Assimilation
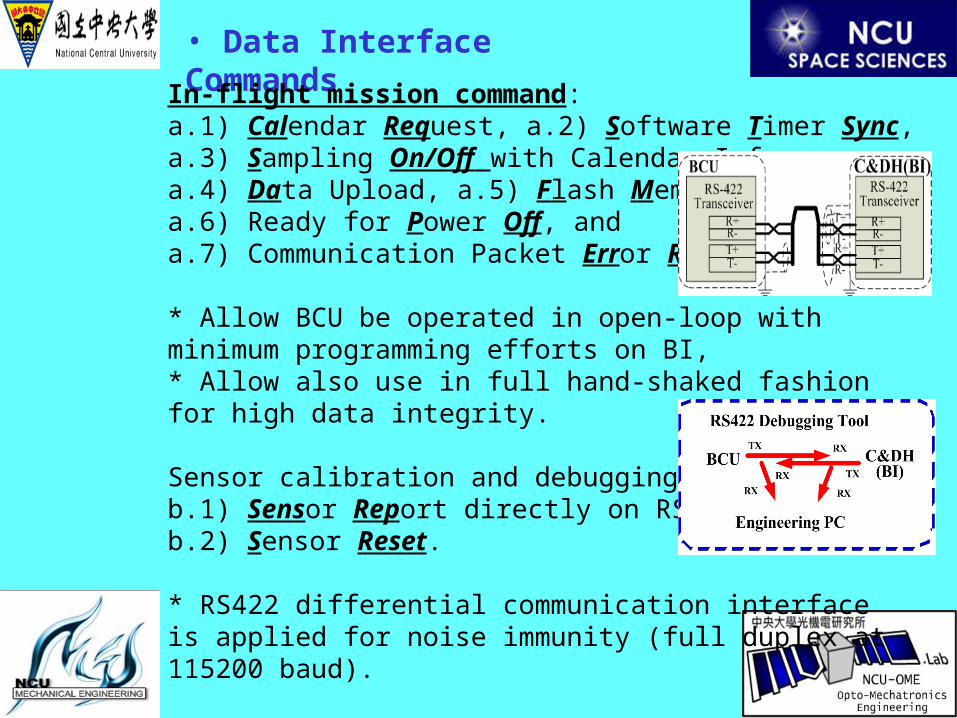
In-flight mission command:a.1) Calendar Request, a.2) Software Timer Sync, a.3) Sampling On/Off with Calendar Info, a.4) Data Upload, a.5) Flash Memory Clear, a.6) Ready for Power Off, and a.7) Communication Packet Error Report. * Allow BCU be operated in open-loop with minimum programming efforts on BI, * Allow also use in full hand-shaked fashion for high data integrity. Sensor calibration and debugging commands: b.1) Sensor Report directly on RS422, and b.2) Sensor Reset. * RS422 differential communication interface is applied for noise immunity (full duplex at 115200 baud).
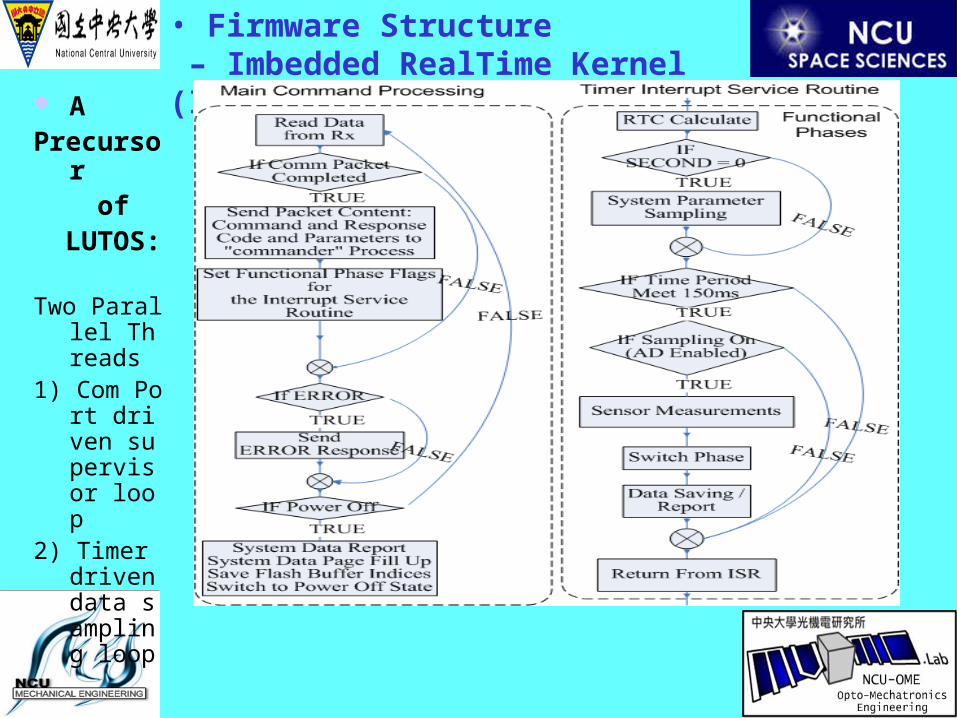
• Firmware Structure – Imbedded RealTime Kernel (In-House ) A
Precursor of LUTOS:
Two Parallel Threads
1) Com Port driven supervisor loop
2) Timer driven data sampling loop
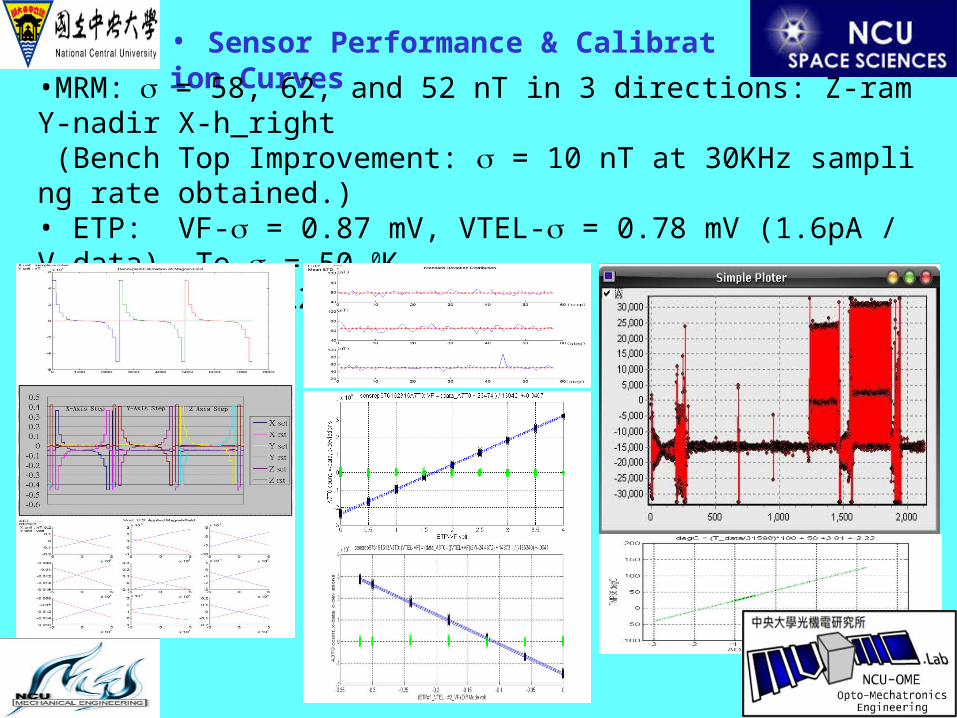
• Sensor Performance & Calibration Curves
•MRM: = 58, 62, and 52 nT in 3 directions: Z-ram Y-nadir X-h_right (Bench Top Improvement: = 10 nT at 30KHz sampling rate obtained.)• ETP: VF- = 0.87 mV, VTEL- = 0.78 mV (1.6pA / V-data), Te- = 50 0K• TEMP: = 2.22 0C
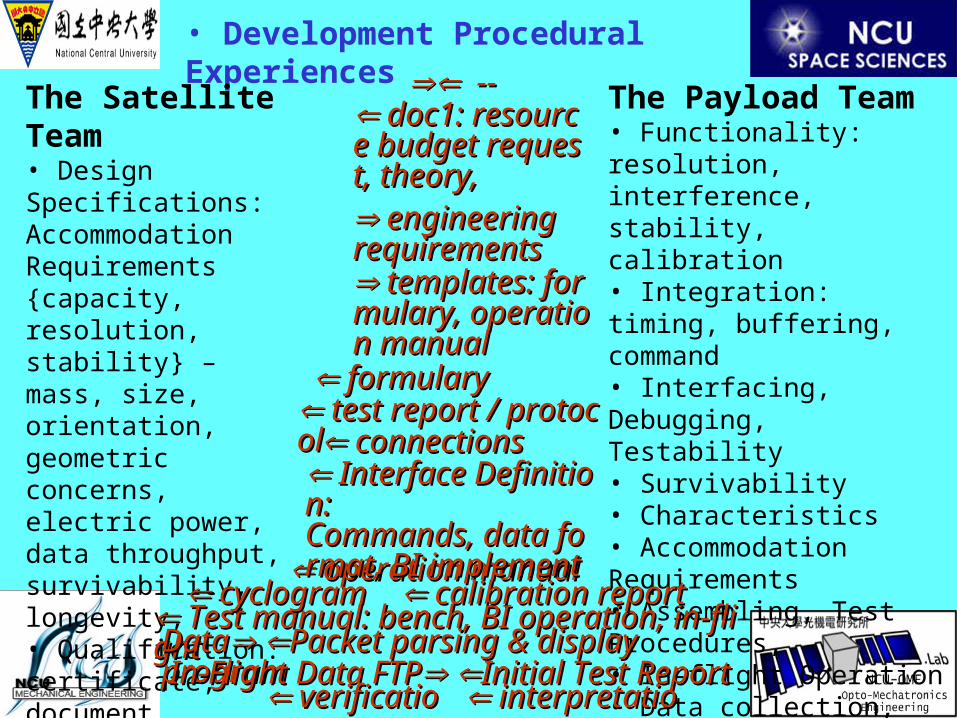
• Development Procedural Experiences
The Satellite Team• Design Specifications:Accommodation Requirements {capacity, resolution, stability} – mass, size, orientation, geometric concerns, electric power, data throughput, survivability, longevity, • Qualification: certificate, document• Information Interfacing: document• Verification: document• Launch
The Payload Team• Functionality: resolution, interference, stability, calibration• Integration: timing, buffering, command• Interfacing, Debugging, Testability• Survivability• Characteristics• Accommodation Requirements• Assembling, Test Procedures, • In-flight Operation• Data collection, parsing, assimilation
Interface Definition:Interface Definition:Commands, data formCommands, data format, BI implementat, BI implement
formularyformulary
Test manual: bench, BI operation, in-flight Test manual: bench, BI operation, in-flight DataData Packet parsing & display programPacket parsing & display program
calibration reportcalibration report
In-Flight Data FTPIn-Flight Data FTP Initial Test ReportInitial Test Report verificationverification interpretationinterpretation
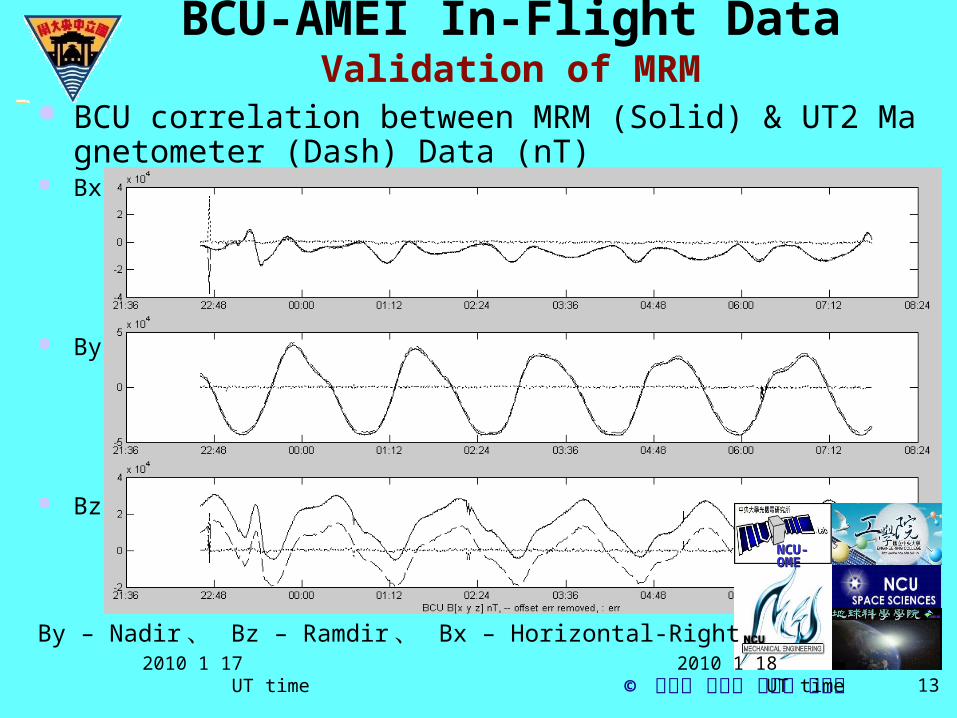
BCU correlation between MRM (Solid) & UT2 Magnetometer (Dash) Data (nT)
Bx
By
Bz
By – Nadir 、 Bz – Ramdir 、 Bx – Horizontal-Right2010 1 17 UT time 2010 1 18 UT time
• MRM Calibration to UT2 Magnetometer
• To obtain earth field measurement in consistent with the TM of Tatiana2: •* tmB• = ( Bbcu2tm=inv(Btm2bcu) ) * ( ( B – Btm2bcuoffset ) +- Btm2bcustd )• = Bbcu2tm * ( B – Btm2bcuoffset ) +- Bbcu2tmstd
•Roughly speaking: calibrating BCU-mrm data to Tatiana-Magnetometer • * TMx : nadir = 1.06* (By nadir + 0.022Gauss)• * TMy : H_right = 1.22* (Bx H_right – 0.002Gauss)• * TMz : ram = 1.12* (Bz ram – 0.146Gauss) • – 0.14* (By nadir + 0.022Gauss)
• Conclusion
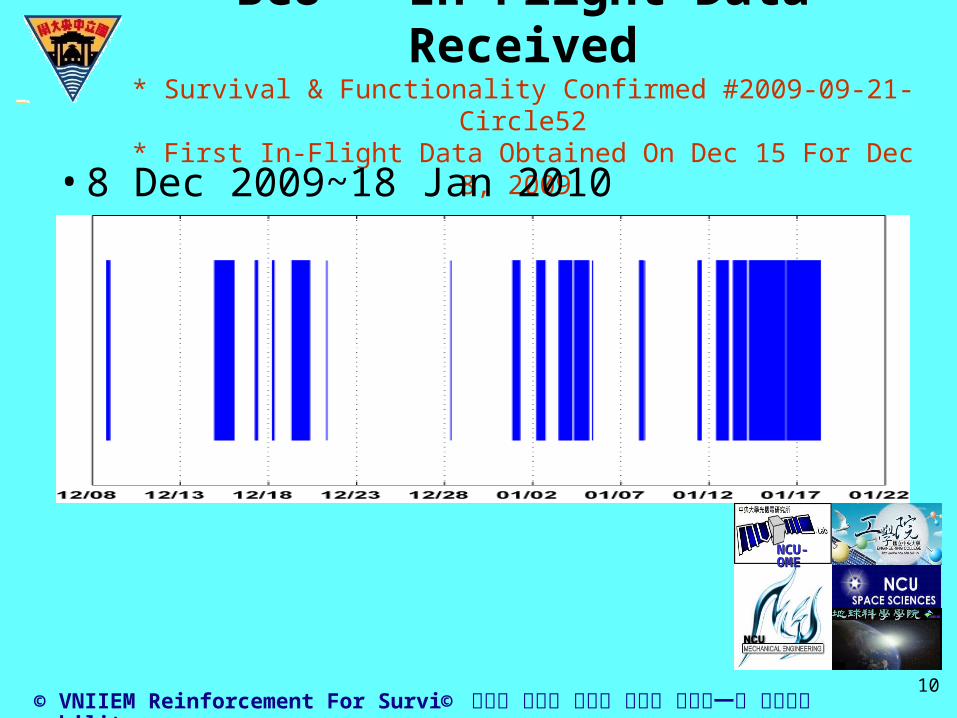
• Launch and Orbiting for Four Months With Successful Survival and Normal Sensor Functions. • Mounting BCU-MRM onto Tatiana2 modified sensor gains along different axes and a significant bias of 0.146Gauss in the ram direction. The STD of inear correlation between Tatiana2 Master magnetometer and BCU-MRM data ranges in 0.009 to 0.018 Gauss. • Instruments are operated in timed phases which were integrated by a software parallelism of command processing and real-time timer interrupt driven state machine. • Effective serial port based debugging tools made information connection setup between BI and BCU very efficient. • One week of data one week before and one week of data immediately after the Haiti Earthquake were collected and being analyzed. (Ja
nuary 12, 2010 at 21.53.09 UT location 15.51°S, 187.97°)http://mvmc.me.ncu.edu.tw/nspotr/science/bcu_science.htm
16
Development of NCU Student Satellite – Inst of OME Project Partnership
NCUNCU-OME -OME
CSIST CSIST
Thank you !• 鄒福康 F K Tsou 、蔣君宏、王迺愨、郝玲妮 教授•張江南、陳志臣 主任• 國科會 科教處 NSC Science Education Division• 教育部顧問室 MOE Advisors Office• 太空計畫室 National Space Program Office• The Team – * 太空科學 Space Science* 機電控制 Mechatronics & Controls* 機器打樣設計 Machine Layout Design* 教育學程 Instruction & Learning • 中科院 Inst S Y Sun
• Interuniversity Scientific Education Program of Space Researches: SPB – T, MSU – P S V, VNIIEM - NPP