25
Roberto A. Bunge AA241X May 14 2014 Stanford University Experimental Aircraft Parameter Estimation AA241X, May 14 2014, Stanford University Roberto A. Bunge

Roberto A . Bunge
AA241X
May 14 2014 S tanford Univers i ty
Experimental Aircraft Parameter Estimation
AA241X, May 14 2014, Stanford University Roberto A. Bunge

Overview
Roberto A. Bunge AA241X, May 14 2014, Stanford University
1. System & Parameter Identification
2. Energy Performance Estimation ¡ Propulsion OFF ¡ Propulsion ON
3. Stability & Control Derivative Estimation ¡ Based on Trim & CG shifting ¡ Linear regressions from dynamic data
4. Measuring Moments of Inertia

System Identification
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Definition: determine a suitable model of a dynamical system, based on experimental input & output data ¡ Find a system S that can reproduce the observed input-output data
� System ID: Given u and y, determine S (inverse problem) � Controls: Given S and y, determine u (inverse problem) � Simulation: Given S and u, determine y (direct problem)
S u(t ) y(t )

System ID vs. Parameter ID
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� System ID: find the structure of S ¡ Very hard problem ¡ Potentially infinite number of models that can produce the same input-
output pairs, especially given noise in the data ¡ In practice, need to reduce the search to a given class of models
� Parameter ID: given the structure of S, find the values of certain coefficients ¡ Much more tractable ¡ Incorporate prior knowledge about the structure of the system that we
know from first principles ¡ Many tools available
� System ID is “just” data fitting ¡ Lots of overlap with Linear Algebra, Digital Signal Processing and
Machine Learning

Parameter ID
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� System model can have linear or nonlinear dynamics, and can be linear or nonlinear w.r.t. unknown parameters ¡ If linear in parameters, there are lots of tools to solve efficiently ¡ Thus, usually its a linear combination of regressors
� is the vector of “free” coefficients in the model ¡ In a linear dynamic model, these could be elements of the A,B,C,D matrices
� Need to compare the “quality” of different models with a Figure of Merit,
usually a sum of squared errors. For example:
� is the measured output, and is the predicted output, if we apply the measured inputs to our model
E(θ ) = [ !yk −k∑ yk (u0…k,θ )]
2
θ
y
!x = θ xi fi (x,u)∑ +ε
y = θ yiigi (x,u)∑ +η
!y

Parameter ID (II)
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Goal: find that minimizes error E:
� This is just an optimization problem, have lots of tools to do this! Should be easy… ¡ If model is explicit, then we should be able to calculate:
� In practice, its an art as well as a science: ¡ We have to provide the model structure! ¡ Need to define E ¡ The data has to be “good”:
÷ The experiments have to be good ÷ Noise should be low
¡ May have local minima…
� Moreover, what we really want is to minimize E on new data ¡ What is the guarantee that minimizing E, will produce a good model?
θ ID = argminθ
E(θ )θ
∂E∂θ, ∂
2E∂2θ
,...

Parameter ID (III)
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� There are common issues in Parameter ID (beyond those of numerical optimization):
1. Experimental data might have “little information” ¡ Number of data points too few ¡ Collinearity of data points and regressors (a.k.a linearly dependent equations) ¡ Input-output space is not covered enough
÷ Need to cover all the state & control space ÷ Need to excite all modes
¡ Unmeasured/Unmodeled disturbances
2. Model complexity vs. noise fitting ¡ If model is very complex and we have few data points, it will have flexibility to contort and fit
the measured data very well ¡ But… this contortion can be too much, producing very bad predictions of new data. This is
known as “chasing the noise”
� Ideally low order model that represents major effects, lots of measurements with low noise and excitation of all the modes

Parameter ID (IV)
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� We can include prior information about the parameters by adding a “regularization” term to the objective function ¡ These could be from aerodynamic modeling, or prior parameter estimations
� This way we say: find the values that best match the measurements, but we give you a hint of what these values should look like
� Can remove many of the ill-conditioned problems we mentioned before
� Need to define a weighting Lambda: expresses the relative confidence on the identification procedure and the prior estimates we had
θ ID = argminθ
E(θ ) +λ ||θ −θo ||2

Frequency Domain System ID
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Parameter estimation can also be done in the Frequency Domain
� Need to convert time-domain data into the frequency domain, using the Fourier Transform
� Can be:
¡ More robust ¡ Faster, due to reduced data points in converting to
frequency ¡ More useful, since we can directly do control design with it

Performance Estimation
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� The (energy) performance of an electric aircraft is characterized by: 1. Lifting aerodynamic efficiency 2. Motor efficiency 3. Propeller efficiency
� In trim flight:
T = D+ Lsin(γ ) = DLL + sin(γ ) = [D
L+ sin(γ )]mg
CL =mg
1 2ρSV(δe )2

Propulsion OFF
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� When propulsion is off (glide):
� By gliding at different velocities (i.e. different elevator positions) and measuring the trim velocity and glide path angle, we can obtain the L/D vs. CL curve
� Need to do this in calm conditions, since wind is not measured
� If lightly damped, the phugoid motion will be superimposed, and measurements will not be as good: ¡ Having a phugoid damper can improve the estimates, and increase productivity
of flight testing ¡ We need to average across several seconds
DL(CL ) = −sin(γ )

Propulsion ON
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� The electric power consumption is given by
� Having obtained the L/D curve from the glide tests, we can now fly
with different throttle positions and speeds, and obtain the overall propulsive efficiency
� Having an RPM sensor would allow for the characterization of the motor efficiency, and thus we could isolate the propeller efficiency:
Pelectric =VeA = [DLV + !h] mg
ηpropηmotor
ηpropηmotor = [DLV + !h] mg
VeA
ηprop = [DLV + !h] mg
VeAηm (Ω,v,R,Kv )

Propwash effects
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� In practice, the airflow over the wing is not the same when propeller is on and off
� Thus, the L/D curve obtained during glides is not fully representative when the propeller is producing thrust
� Some effects of propwash: 1. Increased velocity within slipstream à Increase dynamic pressure,
thus drag on wing, fuselage and tail 2. Swirl à Induced drag on wing and tail 3. If propeller is angled, might also change angle of attack

SD & CD Estimation from Trim Flight & CG Shifting
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� We can also estimate Stability & Control Derivatives by flying at specific trim conditions
� In UAVs its possible to shift the CG around to create useful trim conditions
� Spanwise GC shift: lateral derivatives can be estimated by adding a small weight on the tip of the wing, and trimming it out with control surfaces
� Moment balance at trim: Cl =
mghyqSb
=Clδaδa+Clβ
β +Clδrδr
Cn = 0 =Cnββ +Cnδr
δr +Cnδaδa
mg
h_y

Lateral CG Shifting
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Test 1: deflect ailerons (and rudder if necessary)
� Test 2: deflect rudder only, to induce sideslip
mgh1yqSb
=Clδaδa1 +Clδr
δr1
0 =Cnδrδr1 +Cn δa
δa1
mgh2yqSb
=Clββ2 +Clδr
δr2
0 =Cnββ2 +Cnδr
δr2
(1)
(2)

Lateral CG Shifting
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� If we do this for 2 different CG locations, we have 8 equations and 6 unkowns! ¡ Least squares solution
� Alternatively, we could use the rudder derivatives from a VLM, which are quite reliable given that it’s a lifting surface with small wake interactions ¡ In this case, with one CG displacement we have 4 equations and 4
unknowns
� Need to choose displacement h carefully, based on VLM estimates of SD & CD ¡ To make it possible to trim! ¡ To require small deflections of control surfaces ¡ But not too small, to avoid “stiction” problems

Longitudinal CG Shifting
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Test 0: Measure base trim condition
� Test 1: Add or remove weight at the CG
� Test 2: Move CG forward or back
� Thus, 4 equations and 4 unkowns
h_x
mg
(m+Delta_m) g
CL =CL0=mgq0S
CL =(m+Δm)g
q1S=CL0
+CLαΔα1 +CLδe
δe1
Cm = 0 =CmαΔα1 +Cmδe
δe1
CL =mgq2S
=CL0+CLα
Δα2 +CLδeδe2
Cm =mghxq2Sc
=CmαΔα2 +Cmδe
δe2

Trim based Estimation
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� We can add more trim conditions to improve the estimation accuracy ¡ It now becomes an over defined set of equations à least squares
problem
� Can also include prior estimates, from VLM or back of the envelope calculations, by adding “regularization” terms to the least squares problems
� Further tests could include coordinated turns, to gather information about angular rate derivatives
� Unfortunately, all this should be done for different throttle settings, given the nonlinearities w.r.t. throttle

Linear Regressions from Dynamic Data
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Some SD & CD can be estimated, without the need of complex System ID ¡ Example: roll damping and aileron effectiveness
� In non-dimensional form, the roll equation is:
� We can re-arrange this to:
I xx !p =Clpp+Clδa
δa+…
!p =Clp
Ixxp+
Clδa
I xxδa+…

Linear Regressions from Dynamic Data(II)
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Using flight data for the Bixler 2* gathered at 50Hz, we can numerically differentiate the roll rate to obtain an estimate of roll acceleration
� If we plot data points for which roll acceleration is almost zero we have:
* Thanks to Adrien Perkins and Drone Identity for gathering the flight data!
!p ≈ 0⇒ p =Clδa
Clp
δa
Clδa
Clp
≈ 0.43−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
Equilibrium roll rate vs. aileron deflecion
aileron deflection (fraction of full deflection)
Non−d
imen
sion
al ro
ll−ra
te

Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Similarly we can isolate roll damping, by plotting data points for which the aileron deflection is near zero:
� Note how noisy the
signals are due to win gusts, and other aerodynamic effects (dihedral, rudder, etc.)
δa ≈ 0⇒ !p =Clp
Ixxp+ε
Clp
Ixx≈ −1.23
−0.15 −0.1 −0.05 0 0.05 0.1 0.15
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
X: 0.0516436Y: −0.0635985
Roll damping
Non−dimensional roll rate
Non−d
imen
sion
al ro
ll ac
cele
ratio
n
Linear Regressions from Dynamic Data (III)
Roberto A. Bunge AA241X, May 14 2014, Stanford University
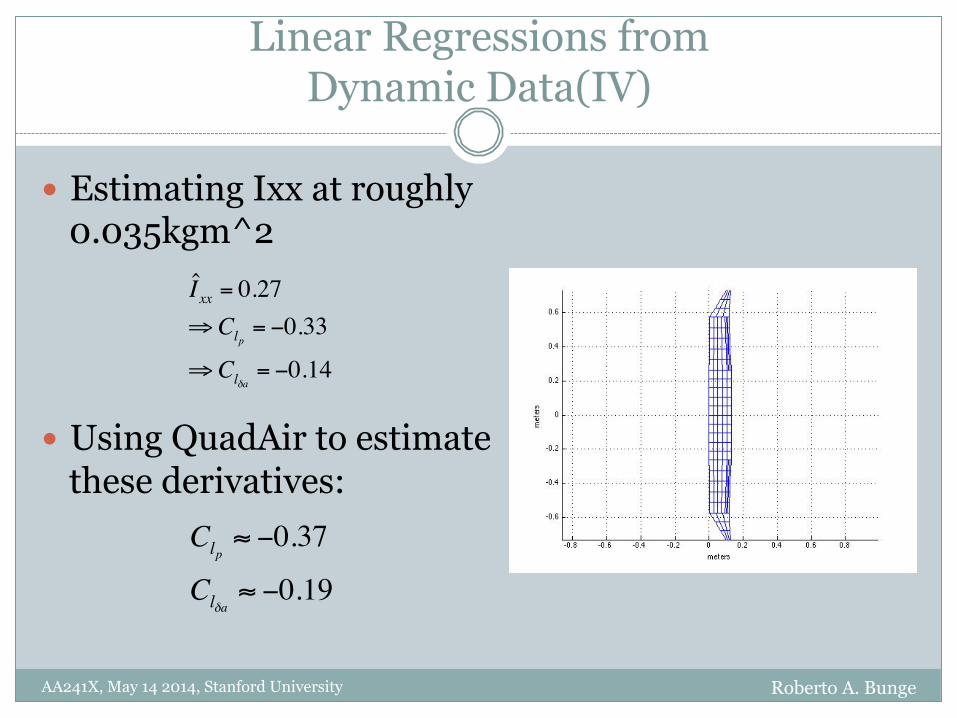
� Estimating Ixx at roughly 0.035kgm^2
� Using QuadAir to estimate
these derivatives:
I xx = 0.27⇒Clp
= −0.33
⇒Clδa= −0.14
Clp≈ −0.37
Clδa≈ −0.19
Linear Regressions from Dynamic Data(IV)

Linear Regressions from Dynamic Data(V)
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� We can also see evidence of the first order dynamics between aileron and roll rate
� Could use estimations of rise time and decay rate to complement the previous estimation methods
763 763.5 764 764.5 765
−150
−100
−50
0
Lag between aileron defection and roll rate
Time (seconds)
Rol
l rat
e (d
eg/s
), ai
lero
n de
flect
ion
(%)
Roll rateAileron

Measuring Moments of Inertia
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� The easiest way to measure the moment of inertia of a body is to use a trifilar pendulum
� The period of oscillation T and moment of inertia I are related by:
÷ W: weight of body ÷ R: distance from strings to the center ÷ L: length of strings
I=Wr2T 2
4π 2L
Ib=(Wb +Wp )r
2Tb+p2
4π 2L− I p

Measuring Moments of Inertia
Roberto A. Bunge AA241X, May 14 2014, Stanford University
� Procedure: 1. Measure constants r & L 2. Measure weight of platform W_p 3. Measure the torsional oscillation period T_p of the platform only, and calculate
the moment of inertia of the platform I_p 4. Measure weight of body W_b 5. Place body on the platform with its CG in the center, and with the axis of
interest parallel to the strings 6. Measure the torsional oscillation period T_b+p, and calculate the moment of
inertia of the body by substracting that of the platform � To reduce measurement error we need to:
¡ Reduce timing error à measure multiple consecutive oscillations ¡ Increase radial distance r ¡ Reduce I_p (as small as can hold the body) ¡ Increase L (as big as possible) ¡ Make sure CG is centered ¡ Make sure the “strings” are rigid

















