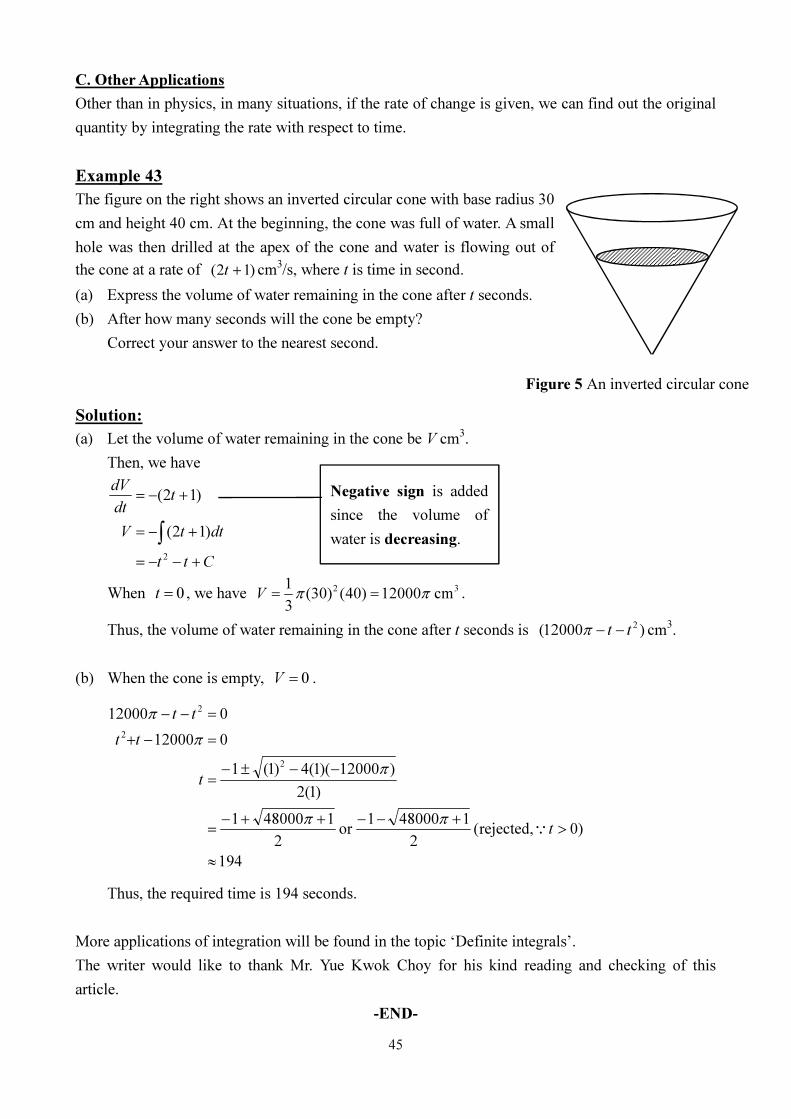
1 HKDSE Mathematics Indefinite Integration By Leon Lee 1. Introduction Integration, either definite or indefinite, is a large topic in HKDSE Extended Module 2. With the introduction of integrations by substitution and by parts, which were not required in HKCEE Additional Mathematics, to the syllabus, a much wider variety of questions can be set compared with the old syllabus. Therefore, students should pay much more attention to this topic, and try to master this topic as well as possible for good results in M2 examination. This note will demonstrate the techniques in solving problems involving indefinite integration as detailed as possible. It will start from the basic problems, and gradually to the hardest problems which involve advanced techniques in integration. 2. What is Indefinite Integration? → Indefinite integration can be considered the ‘reverse’ process of differentiation. → In differentiation, we find the derivative of a function. In indefinite integration, we find the primitive function of a function. → In simpler words, if the derivative of ) ( x F is ) ( x f , then ) ( x F is a primitive function of ) ( x f , i.e. ) ( ) ( x f x F dx d = . → The primitive function of a function is not unique in nature. Note that ) ( ] 2 ) ( [ ] 1 ) ( [ ) ( x f x F dx d x F dx d x F dx d = + = + = . Then ) ( x F , 1 ) ( + x F and 2 ) ( + x F are all primitive functions of ) ( x f . When we replace 1 or 2 by any other real constants, say π , e , 2 or 10 - , we still get the same result. → From the above results, we see that there are infinitely many primitive functions for any integrable function. For convenience, if ) ( ) ( x f x F dx d = , then we write ∫ + = C x F dx x f ) ( ) ( . → The constant C is called the constant of integration, and it is arbitrary in nature. → The sign ∫ is called the integral sign, and ) ( x f is called the integrand. Quick Example: As x x dx d 4 1 2 = , we have C x dx x + = ∫ 2 4 1 . F(x)+C f (x) differentiation indefinite integration Figure 1 A diagrammatic representation of differentiation and indefinite integration
Transcript
1
HKDSE Mathematics
Indefinite Integration
By Leon Lee
1. Introduction
Integration, either definite or indefinite, is a large topic in HKDSE Extended Module 2. With the
introduction of integrations by substitution and by parts, which were not required in HKCEE
Additional Mathematics, to the syllabus, a much wider variety of questions can be set compared
with the old syllabus. Therefore, students should pay much more attention to this topic, and try to
master this topic as well as possible for good results in M2 examination.
This note will demonstrate the techniques in solving problems involving indefinite integration as
detailed as possible. It will start from the basic problems, and gradually to the hardest problems
which involve advanced techniques in integration.
2. What is Indefinite Integration?
→ Indefinite integration can be considered the ‘reverse’ process of differentiation.
→ In differentiation, we find the derivative of a function.
In indefinite integration, we find the primitive function of a function.
→ In simpler words, if the derivative of )(xF is )(xf , then )(xF is a primitive function of )(xf ,
i.e. )()( xfxFdx
d= .
→ The primitive function of a function is not unique in nature.
Note that )(]2)([]1)([)( xfxFdx
dxF
dx
dxF
dx
d=+=+= .
Then )(xF , 1)( +xF and 2)( +xF are all primitive functions of )(xf .
When we replace 1 or 2 by any other real constants, sayπ , e , 2 or 10− , we still get the
same result.
→ From the above results, we see that there are infinitely many primitive functions for any
integrable function.
For convenience, if )()( xfxFdx
d= , then we write ∫ += CxFdxxf )()( .
→ The constant C is called the constant of integration, and it is
arbitrary in nature.
→ The sign ∫ is called the integral sign, and )(xf is called
the integrand.
Quick Example:
As x
x
dx
d
4
1
2=
, we have C
xdx
x+=∫
24
1.
F(x)+C f (x)
differentiation
indefinite integration
Figure 1 A diagrammatic representation of
differentiation and indefinite integration
2
3. Methods of Indefinite Integration
The methods of indefinite integration will be introduced below.
3.1. Elementary Integration
The following shows some fundamental indefinite integration results, which can be obtained
directly from differentiation.
(1) constant a is where, kCkxkdx∫ +=
(2) ∫ −≠+
+
=
+
1 where,1
1
nCn
xdxx
n
n
(3) ∫ ≠+= 0 where,ln1
xCxdxx
(4) 0 where, ≠+=∫ aCa
edxe
ax
ax
From (4), when 1=a , we have
(5) ∫ += Cedxexx .
The following gives the proof of (3). The remaining is left to readers as an exercise.
Proof:
When 0>x , xx lnln = . We havex
xdx
d 1)(ln = .
When 0<x , )ln(ln xx −= . We havexx
xdx
d 1)1(
1)][ln( =−
−
=− .
Combining the results, we have Cxdxx
+=∫ ln1
.
Furthermore, we have the following properties. They can also be easily proved by employing
differentiation.
(6) ∫ ∫= constant a is where,)()( kdxxfkdxxkf
(7) [ ]∫ ∫ ∫±=± dxxgdxxfdxxgxf )()()()(
Using (7) repeatedly, we have
(8) [ ] ∫∫∫ ∫ ±±±=±±± dxxfdxxfdxxfdxxfxfxfnn
)(...)()()(...)()(2121
Important!
is the absolute sign. It is defined as:
<−
≥=
0 when ,
0 when ,
xx
xx
x
3
Example 1
Find dxx
x∫
−
4
2 1. (HKDSE Sample Paper)
Solution:
Cx
xxxx
Cx
xxxx
dxxx
xxx
dxxx
xxx
dxxx
xCx
xCx
xCxdxx
x
+−−+−=
+−
+−⋅+⋅−=
+−+−=
+−+−=
−+
−+
−+
−+=
−
−
−
∫
∫
∫∫
3
3
69
3369
4258
4
258
43
24
3
2
224
2
324
1
42
4
2
3
1ln42
3
2
9
3ln4
36
64
9
)4
64(
1464
11)(
1)(
1)()(
1
Note: Always add the constant C after indefinite integration!
To make it simple, you should add it whenever the integral sign ∫ disappears.
Example 2
Find (a) ( ) dxx∫ +
2
1 (b) ∫ dxx10 .
Solution:
(a) ( )∫ + dxx2
1
Cxxx
Cxxx
dxxx
dxxx
+++=
++⋅+=
++=
++=
∫
∫
2
32
2
32
2
1
3
4
2
3
22
2
)12(
)12(
(b) We first let constant. a is where,10 aeaxx =
Solving, we have 10ln=a .
C
Ce
dxe
dx
x
x
x
x
+=
+=
= ∫
∫
10ln
10
10ln
10
10ln
10ln
10ln
10ln
ln10ln
=
=
=
a
axx
eaxx
(Binomial Theorem)
4
3.2. Integration by Substitution
The above formulae are very limited in usage and cannot deal with most integrals like
dxx
x
∫−
+
1
1 or dx
x
x
∫+1
2
2
. We need a new method called ‘integration by substitution’ to deal
with these integrals.
Let )( xgu = . Then, we have ∫ ∫= duufdxxgxgf )()('))(( .
The proof is given in the appendix of this note on p.46.
This method can be regarded as the ‘reverse’ of the chain rule in differentiation.
Refer to the following illustration to see how we can apply this method to find integrals:
Consider dx
x
x
∫+1
2
2
. We take 1)( 2+== xxgu . Then, we have xxg' 2)( = .
Cx
Cu
duu
dxxgxg
xdxxg
dxx
x
++=
+=
=
=
⋅=
+
∫
∫
∫∫
−
12
2
)(')(
1
2)(
1
1
2
2
2
1
2
1
2
As seen from the above example, we can see that we express the integral in the form
∫ dxxgxgf )('))(( and transform it into the form ∫ duuf )( for simpler calculation.
However, we usually use the following way:
Let 12+= xu , then xdxdu 2= , i.e. du
xdx
2
1= .
Cx
Cu
duu
duxu
xdx
x
x
++=
+=
=
⋅=
+
∫
∫∫
−
12
2
2
12
1
2
2
2
1
2
1
2
We use a suitable substitution )(xgu = at the beginning. We differentiate it with respect to x
(w.r.t. x, in short) to obtain dxxgdu )('= . By rearranging terms, we get duxg
dx)('
1= . We put
it into the original integral and express the whole integral in terms of the new variable u only.
Finally, we find the integral, and express the result in terms of the original variable x.
We express dx in
terms of du.
Here, x
xf1
)( = and 1)( 2+= xxg .
5
Example 3 (2012 DSE)
(a) Find ∫+
dxx
x 1.
(b) Using the substitution 12−= xu , find ∫
−
dxx
x
12
3
.
Solution:
(a) ∫∫ ++=+=+
Cxxdxx
dxx
xln)
11(
1
(b) Let 12−= xu , then xdxdu 2= , i.e. du
xdx
2
1= .
2
1 where,'1ln
2
1
2
1
1ln2
1)1(
2
1
ln2
1
2
1
1
2
1
1
22
22
2
3
−=+−+=
+−+−=
++=
+=
−∫∫
CC'Cxx
Cxx
Cuu
duu
udx
x
x
*Think About*:
(1) Why did we not to include 2
1− in final answer and use a new constant 'C instead?
(2) Why and how is 2x changed into 1+u ?
Example 4
Suppose 0>x .
Find (a) ∫+
dxebax (b) ∫
++
+ dxebaxcbxax
2
)2( (c) ∫ dxex
x
2
2
1 (d) ∫ dx
x
xln.
Solution:
(a) ∫∫ +=+=
+
++
Ca
ebaxde
adxe
bax
baxbax)(
1
(b) Cecbxaxdedxebaxcbxaxcbxaxcbxax+=++=+
++++++
∫∫222
)()2(2
(c) Cex
dedxex
xxx +−=
−= ∫∫
222
22
12
2
11
(d) Cx
xxddxx
x+== ∫∫ 2
)(ln)(lnln
ln 2
(by (a)) Always remember:
Express your final answer
in terms of the original
variable!
6
Example 5
Find ∫ + dxxx20132 )1( .
Solution:
Let 1+= xu , then dxdu = .
Cxxx
Cuuu
duuuu
duuuu
duuu
dxxx
++
++
−+
=
++−=
+−=
+−=
−=
+
∫
∫
∫
∫
2014
)1(
2015
)1(2
2016
)1(
20142015
2
2016
)2(
)12(
)1(
)1(
201420152016
201420152016
201320142015
20132
20132
20132
Example 6
Find (a) ∫−
+dx
x
x
1
1 (b) ∫
−
dxx
x
1
2
.
Solution:
(a) ∫∫−
+−=
−
+dx
x
xdx
x
x
1
21
1
1
Cxx
xdx
dx
dxxx
x
+−+=
−−
+=
−+
−
−=
∫ ∫
∫
1ln2
)1(1
12
1
2
1
1
(b) Let 1−= xu , then dxdu = .
∫−
dxx
x
1
2
'1ln22
)1(
1ln)1(22
)1(
ln22
)1
2(
12
)1(
2
2
2
2
2
Cxxx
Cxxx
Cuuu
duu
u
duu
uu
duu
u
+−++−
=
+−+−+−
=
+++=
++=
++=
+=
∫
∫
∫
We can write ∫ dx1 simply as
∫ dx , omitting the constant 1.
7
Example 7 (Long Division & Partial Fractions)
(a) Let 23
)()(
23
18622
23456
+−
+≡
+−
++−−−−
xx
xgxf
xx
xxxxxx, where )(xf and )(xg are
two polynomials with 4)(deg ≤xf and 2)(deg <xg . Find )(xf and )(xg .
(b) Let 2123
)(2
−
+
−
≡
+− x
B
x
A
xx
xg, where A and B are constants. Find A and B.
(c) Hence, find ∫+−
++−−−−dx
xx
xxxxxx
23
186
2
23456
.
Solution:
(a) Here, we perform long division.
43 2 1
1
8124
1 8 124
6 93
1 8 6 53
462
1 8 6 1 3 2
23 1
1 8 6 1 1 1 12 3 1
+++
+
+−+
++−+
+−+
++−−+
+−+
++−−−+
+−
++−−−−+−
Then, we have 23
1432
23
186
2
234
2
23456
+−
++++=
+−
++−−−−
xx
xxxx
xx
xxxxxx
.
Thus, xxxxxf 432)( 234+++≡ and 1)( ≡xg .
(b) From (a), 1)( ≡xg .
)1()2(1
2123
12
−+−≡
−
+
−
≡
+−
xBxA
x
B
x
A
xx
Put 1=x , we have )11()21(1 −+−= BA , i.e. 1−=A .
Put 2=x , we have )12()22(1 −+−= BA , i.e. 1=B .
(c) From above, we have1
1
2
1432
23
186 234
2
23456
−
−
−
++++=
+−
++−−−−
xx
xxxx
xx
xxxxxx
Cx
xxx
xx
Cxxxxxx
dxxx
xxxxdxxx
xxxxxx
+−
−++++=
+−−−++++=
−−
−++++=
+−
++−−−−∫∫
1
2ln2
25
1ln2ln225
1
1
2
1432
23
186
23
45
23
45
234
2
23456
Points to note:
1. The notation ‘deg’ is used to refer to the
degree of a polynomial. For instance, let
12)( 25+−= xxxh , then )(deg xh is
equal to 5.
2. This type of long division without
variables written is known as the method of
detached coefficients.
3. The method employed in (b), i.e. to break
an algebraic fraction into sum of fractions
with denominators of smaller degrees, is
called resolving an algebraic fraction into
partial fractions.
8
Example 8 (Reduction Formula)
Let nxxy )(ln= , where 0>x .
(a) Find dx
dy.
(b) Let ∫= dxxIn
n)(ln , where 0≥n .
Using the result in (a), or otherwise, show that 1
)(ln−
−=n
n
nnIxxI
(c) Hence, find 4I .
Solution:
(a) nnnn xxnxx
xnxdx
dy)(ln)(ln)1()(ln
1)(ln 11
+=⋅+⋅⋅=−−
(b) Integrating both sides w.r.t. x, we have
1
1
1
1
)(ln
)(ln)(ln)(ln
)(ln)(ln)(ln
)(ln)(ln
−
−
−
−
−=
−=
+=
+=
∫∫
∫∫
∫∫
n
n
n
nnn
nnn
nn
nIxxI
dxxnxxdxx
dxxdxxnxx
dxxdxxny
(c) Using the result in (b) repeatedly, we have
[ ][ ]
[ ]
Cxxxxxxxxx
dxxxxxxxxxx
Ixxxxxxxx
Ixxxxxx
Ixxxx
IxxI
++−+−=
+−+−=
−−+−=
−+−=
−−=
−=
∫24ln24)(ln12)(ln4)(ln
)(ln24ln24)(ln12)(ln4)(ln
ln24)(ln12)(ln4)(ln
2)(ln12)(ln4)(ln
3)(ln4)(ln
4)(ln
234
0234
0
234
1
234
2
34
3
4
4
Notes:
(1) The method employed in this question is to establish a reduction formula, which
reduces an integral from a higher to lower power, with the same form. A reduction
formula can be used repeatedly to lower the power of the integral, until it can be
integrated easily. In this way, the integrals in certain forms, no matter how high the
power is, can be found.
(2) We can find out a reduction formula by differentiation. However, we usually use a
technique called integration by parts to find them out. This will be introduced in
Section 3.5. (Refer to Example 34 for details)
9
3.3. Integration of Trigonometric Functions
Trigonometric functions can be differentiated. Similarly, they can also be integrated.
3.3.1. Basic Integration of Trigonometric Functions
From differentiation, we have the following basic results.
(1) ∫ +−= Cxxdx cossin
(3) ∫ += Cxxdx tansec2
(5) ∫ += Cxxdxx sectansec
For other integrals of trigonometric functions, different trigonometric identities are useful.
Example 9
Find (a) ∫ dxx
2sin
2 (b) ∫ xdx2tan .
Solution:
(a) Cxxxdxxxdxdxdxx
dxx
+−=−=−=−
= ∫∫∫∫∫ sin2
1
2
1cos
2
1
2
1cos
2
1
2
1
2
cos1
2sin
2
(b) Cxxdxxxdx +−=−= ∫∫ tan)1(sectan 22
(Can you find ∫ dxx
2cos
2 and ∫ xdx2cot ? Give them a try!)
3.3.2. Integration of Trigonometric Functions with Method of Substitution
The method of substitution can also be used in finding integrals of trigonometric functions.
Example 10
Find ∫ xdxx cos3sin .
Solution:
[ ]
Cxx
xxdxxd
dxxx
dxxxxx
xdxx
+−−=
⋅+⋅=
+=
−++=
∫∫
∫
∫
∫
2cos4
14cos
8
1
)2(2sin2
1
2
1)4(4sin
4
1
2
1
)2sin4(sin2
1
)3sin()3sin(2
1
cos3sin
(2) ∫ += Cxxdx sincos
(4) ∫ +−= Cxxdx cotcsc2
(6) ∫ +−= Cxxdxx csccotcsc
Point to note:
Generally, we have the following formulas
for constants a and b, with 0≠a :
Cbaxa
dxbax
Cbaxa
dxbax
++=+
++−=+
∫
∫
)sin(1
)cos(
)cos(1
)sin(
They can be proven easily by differentiation
or method of substitution, with substitution
baxu += . They are widely accepted
and are not required to be proven again
in your calculations.
10
Example 11
(a) Prove that x
x
x
2sin
2cos1tan
−
= .
(b) Hence, or otherwise, find ∫−
dxx
x
2sin
2cos1.
Solution:
(a) LHStancos
sin
cossin
sin
2
2cos1
cossin2
2
2sin
2cos1RHS
2
====
−
⋅=
−
= x
x
x
xx
xx
xxx
x
Thus, we have x
x
x
2sin
2cos1tan
−
= .
(b) Cxxdx
dxx
xxdxdx
x
x+−=−===
−
∫ ∫∫∫ cosln)(coscos
1
cos
sintan
2sin
2cos1
Example 12
Find ∫ xdxsec .
Solution:
∫ xdxsec
∫+
+= dx
xx
xxx
tansec
)tan(secsec
∫+
+
=
xx
xxd
tansec
)tan(sec (Here, xxu tansec += and dxxxxdu )tan(secsec += .)
Cxx ++= tansecln
Notes:
(1) Students are strongly recommended to recite the substitution used in Example 12, as well
as the way to find this integral.
(2) Alternatively, you can find the integral using partial fractions as follows:
∫ ∫∫∫∫−
=
−
=== duu
xdx
dxx
xdx
xxdx
222 1
1)(sin
sin1
1
cos
cos
cos
1sec (for xu sin= )
We can let u
B
u
A
u −
+
+
≡
− 111
1
2. Solving the simultaneous equations set up by
comparing like terms, we can get 2
1=A and
2
1=B . (Refer to Example 7 for details)
Then, Cx
xCuudu
udu
uxdx +
−
+=+−−+=
−
+
+
= ∫∫∫sin1
sin1ln
2
11ln
2
11ln
2
1
1
1
2
1
1
1
2
1sec .
(3) Can you find ∫ xdxcsc ? Give it a try! (Hint: Let xxu cotcsc += )
(or Cx +secln )
11
Example 13 (Subsidiary Angle)
(a) Let2
0π
θ << . By differentiating )tanln(sec θθ + , show that ∫ ++= Cd )tanln(secsec θθθθ ,
where C is a constant.
(b) Let )cos(sincos αθθθ +=− r , where r and α are constants with 0>r and 22
π
α
π
<<− .
Find r and α .
(c) Hence, find ∫−
θθθd
sincos
1.
Solution:
(a) θθθθθθ
θθθ
sec)sectan(sectansec
1)tanln(sec 2
=+
+
=+
d
d
Integrating both sides w.r.t. θ , we have
Cd ++=∫ )tanln(secsec θθθθ
(b) θααθαθθθ sincossincos)cos(sincos rrr −=+=−
Comparing like terms, we have
−=−
=
)2...(....................1cos
..(1).................... 1sin
α
α
r
r
1tan:)2(
)1(=α
We get 4
π
α = .
2222222 11)cos(sin:)2()1( +=++ ααr
We get 2=r .
(c) From (b), we have
+=−4
cos2sincosπ
θθθ .
C
d
dd
+
++
+=
+
+=
+
=−
∫
∫∫
4tan
4secln
2
2
44sec
2
1
4cos
1
2
1
sincos
1
πθ
πθ
πθ
πθ
θπ
θ
θθθ
Notes:
(1) The form )sin( α±xr or )cos( α±xr is called the subsidiary angle form. It expresses the sum
(or difference) of two sine (or cosine) functions (with any non-zero coefficients) as a product
of a non-zero real number and a sine (or cosine) function.
(2) Subsidiary angle form is NOT required in HKDSE M2 Examination. However, question
format as in Example 13 is possible to appear in the examination.