Fast-Field Cycling Nuclear Magnetic Resonance relaxometer’s magnet with optimized homogeneity and reduced volume Pedro Miguel Santos Videira Thesis to obtain the Master of Science Degree in Engineering Physics Supervisors: Prof. Pedro José Oliveira Sebastião Prof. Duarte de Mesquita e Sousa Examination Committee Chairperson: Prof. Doutor Pedro Domingos Santos do Sacramento Supervisor: Prof. Doutor Pedro José Oliveira Sebastião Member of the Committee: Prof. Doutor João Luís Maia Figueirinhas Novembro 2017
Transcript
Fast-Field Cycling Nuclear Magnetic Resonancerelaxometer’s magnet with optimized homogeneity and
reduced volume
Pedro Miguel Santos Videira
Thesis to obtain the Master of Science Degree in
Engineering Physics
Supervisors: Prof. Pedro José Oliveira SebastiãoProf. Duarte de Mesquita e Sousa
Examination Committee
Chairperson: Prof. Doutor Pedro Domingos Santos do SacramentoSupervisor: Prof. Doutor Pedro José Oliveira SebastiãoMember of the Committee: Prof. Doutor João Luís Maia Figueirinhas
Novembro 2017
ii
Dedicated to Teresa, Orlando and Daniel Videira...
iii
iv
Acknowledgments
This thesis represents the conclusion of my master degree and holds a very special meaning for me.
After five years of constant learning and growth I had the pleasure to work beside an amazing team in
an impressive project. This wouldn’t be possible without my supervisors. I came into this project without
any idea of NMR or FFC and I’m grateful for all the patience and guidance that they provide in order for
me to succeed.
I would like to thank my teacher and supervisor in the Physics Department, Pedro Sebastio. He has
been a great teacher and inspiration since I met him in my second year. His expertise , patience and
dedication to his work are outstanding. He has been a mentor in many aspects beside this thesis and
I’m proud for having him as my supervisor.
To my supervisor Duarte Sousa, I would like to thank for all the help and insights in the development
of this project. Many ideas came from his knowledge and experience in this field and many parts of this
wouldn’t have been possible without his help.
To my co-supervisor Antnio Roque, which spent many hours working with me, guided me through
the whole process and always pushed me to do my best. His expertise in the development of a previous
equipment were the base for this work. We learned a lot with mistakes along the way and he definitely
turned the hard work of this past few months into a lot of fun.
A very special thanks to all of my supervisors for their friendship and support. I also would like to
thank everyone involved in the NMR tribe of IST. I had the pleasure of interacting with a few such as
Carlos Cruz, Joo Figueirinhas, Luis Gonalves and Manuel Cascais which all provided support in some
way. I wish them the best of luck and votes of success in their vision and goals for the NMR field.
To all my friends, specially to ”Turno da Noite” which have walked beside me on this journey since
day 1. I special remark to my friends in Chaves which have always believed in me and my goals, your
trust in my abilities truly makes me believe in myself.
Finally, I would like to thank my family and my girlfriend, Mafalda. To my mother, my father for the
sacrifice of giving me the best education I could ask for and for many other things that words will never
be able to express. To my aunt Ana and uncle Vitor, and my cousins Rui, Sarah, Telma and Cristina. To
Mafalda, you’ve been my partner , mentor and safe harbor, you really helped through this one. I’ve been
surrounded by the most incredible people and that’s what is all about. I’m extremely grateful for all of it.
Thank you.
v
vi
Resumo
A Ressonancia Magntica Nuclear (RMN) de Campo Cclico Rpido (CCR) uma tcnica experimental uti-
lizada em vrios domnios do conhecimento tais como a fsica, qumica, medicina, farmaceutica, materiais,
biologia entre outras.
Esta tcnica faz uso das propriedades magnticas de certo ncleos atmicos para medies de constantes
de relaxaao magntica nuclear numa grande gama de frequencias, permitindo a analise da dinamica
molecular e obtenao de uma informao caracterstica da amostra sob estudo.
A implementao da tcnica requer o uso de espectrmetros apropriados capazes de criar um campo de
induao magntica ~Bo com a possibilidade de efectuar transies rpidas, emitir impulsos de radio frequencia
e detectar sinais, em condies de boa homogeneidade de campo com controlo de temperatura adequado.
Este trabalho faz uso de uma soluo inovadora relativamente aos equipamentos que constituem o
estado da arte j desenvolvida com sucesso no passado pelo grupo de investigao do CeFEMA associado
ao trabalho desenvolvido. apresentado um magneto de um espectrmetro de CCR com volume reduzido,
homogeneidade optimizada e consumo energtico reduzido. Os sistemas acopolados ao magneto tal
como o arrefecimento deste, aquecimento da amostra so tambm projectados.
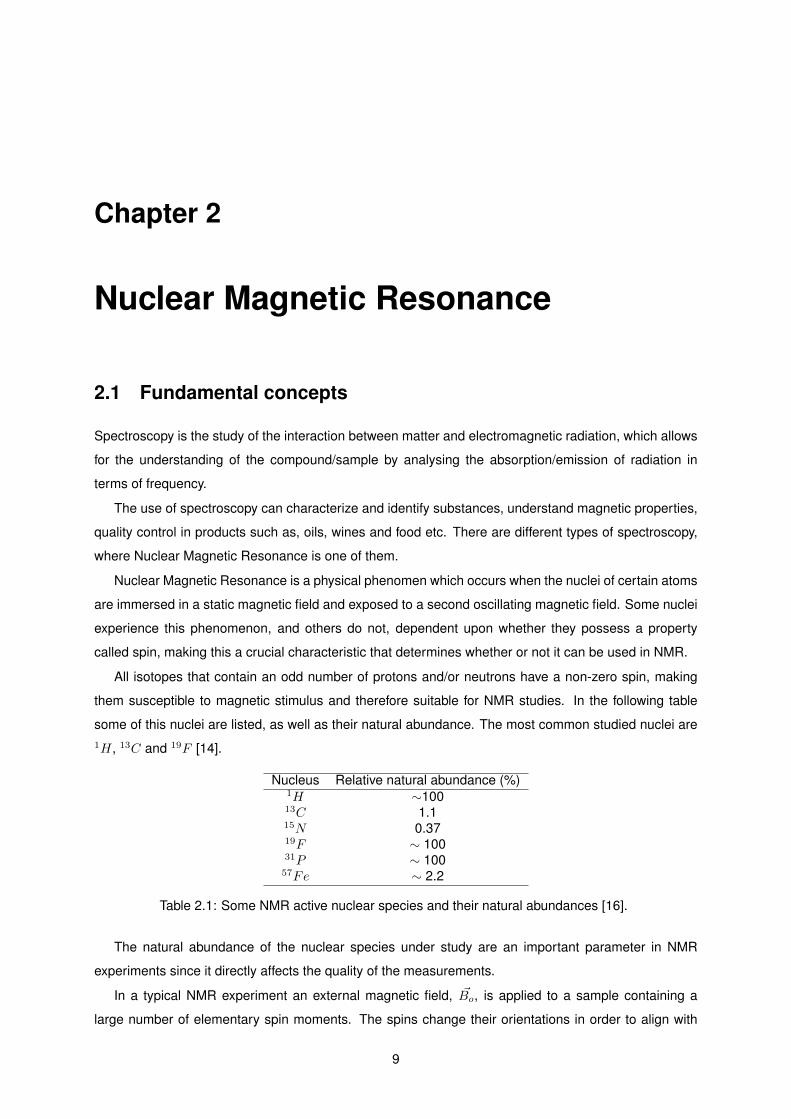
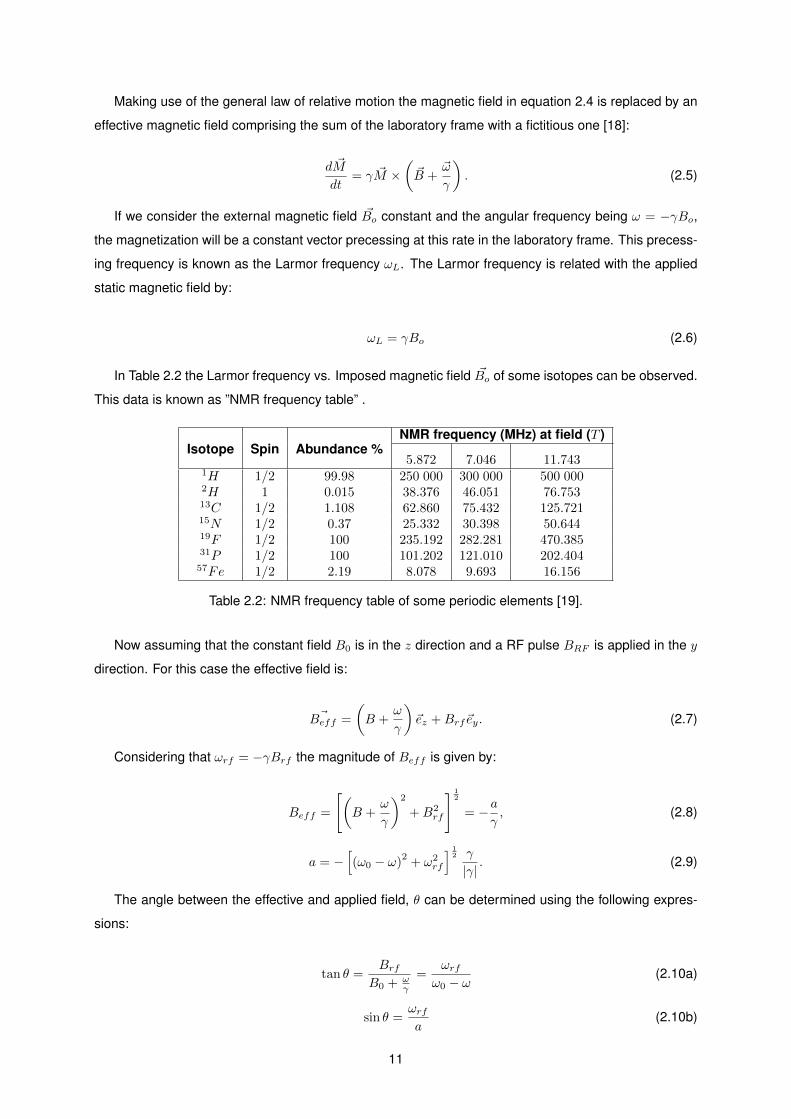
Table 2.2: NMR frequency table of some periodic elements [19].
Now assuming that the constant field B0 is in the z direction and a RF pulse BRF is applied in the y
direction. For this case the effective field is:
~Beff =
(B +
ω
γ
)~ez +Brf~ey. (2.7)
Considering that ωrf = −γBrf the magnitude of Beff is given by:
Beff =
[(B +
ω
γ
)2
+B2rf
] 12
= −a
γ, (2.8)
a = −[(ω0 − ω)
2+ ω2
rf
] 12 γ
|γ|. (2.9)
The angle between the effective and applied field, θ can be determined using the following expres-
sions:
tan θ =Brf
B0 +ωγ
=ωrf
ω0 − ω(2.10a)
sin θ =ωrf
a(2.10b)
11
cos θ =ω0 − ω
a(2.10c)
Using this results the flip angle α of the magnetization with respect to B0 can be determined by
assuming that at t = 0 they are aligned:
cosα = cos2 θ sin2 θ cos at = 1− 2 sin2 θ sin21
2at (2.11)
The flip angle α defines the duration of the RF pulse. A π/2 pulse flips the magnetization by 90
degrees.
2.3 Resonance condition
Analysing the previous expressions that characterize the flip angle α and the angle between the effec-
tive and applied magnetic field θ one can conclude that only when |ω − ωo| ≈ |ωrf | these angles have
significant values. These condition is known as the resonance condition. In NMR experiments, π/2 RF
pulses in resonance with the Larmor frequency are applied to the sample in order to flip the magneti-
zation 90 degrees. Despite of the magnitude of Brf being much smaller than the ~Bo magnitude, it is
enough to cause the desired flip. The previous flip angle equation 2.11 can be reduced to the following
for a resonance pulse:
α = −γBrf tpulse (2.12)
with tpulse being the pulse length. The reasoning using equation 2.4 is only valid for a pulse length
much smaller than the time characterizing the relaxation of the magnetization back to its equilibrium
position. The relaxation concept is crucial in NMR experiments and will be presented next.
2.4 Relaxation and the complete Bloch equations
The interactions between nuclei and the fields created by thermal agitation, even if a lot weaker when
compared to the external field, become very important over long periods of time because of their cumu-
lative effects. In equation 2.4 thermal agitation, interaction between neighbouring nuclei as well as the
influence of fields produced by the electrons in the sample are neglected. These factors influence the
orientation of the magnetization vector and should be taken into account.
We start to assume at equilibrium that the static magnetic field and sample magnetization are both
along the z-axis: ~B = Bo ~ez , ~M = Mo ~ez. When a perturbation, such as a π/2 RF pulse, is applied, the
magnetization starts to re-establishes its initial value along the applied external magnetic field ~B = Bo ~ez
in a process known as relaxation. This decay towards equilibrium is exponential and is expressed by an
12
additional term on each of the components of equation 2.4:
dMz(t)
dt= [ ~M × γ ~B]x − Mz(t)−Mo
T1(2.13a)
dMy(t)
dt= [ ~M × γ ~B]y −
Mx(t)
T2(2.13b)
dMx(t)
dt= [ ~M × γ ~B]z −
My(t)
T2(2.13c)
The time constants T1 and T2 are related to the realignment of nuclei magnetizations with the external
field and are known as relaxation rates. Nuclear magnetic resonance experiments are precisely used to
acquire this frequency dependent relaxation constants.
The spin-lattice relaxation time, T1 is the time constant for the physical processes responsible for the
relaxation of the components of the nuclear spin magnetization vector ~M parallel to the external mag-
netic field, ~Bo (z component, also named longitudinal component). Values of T1 range from milliseconds
to several seconds [9]. Spin-spin relaxation, T2 is at its most fundamental level the evolution time to-
wards the de-coherence of the transverse nuclear spin magnetization. Fluctuations of the local magnetic
field lead to random variations in the instantaneous NMR precession frequency of different spins. As a
result, the initial phase coherence of the nuclear spins is lost, until eventually the phases are disordered
and there is no net xy magnetization.
The equipment proposed in this document, will only measure spin-lattice relaxation time, T1.
After a π/2 pulse the magnetization will spin on the x− y axis while the z component of the magne-
tization reappears till it is back to the initial state (Figure 2.1).
Figure 2.1: Magnetization realignment with B0, after a π/2 pulse [20].
The behaviour of the different components of the magnetization over time can be seen in Figure 2.2.
13
Figure 2.2: Time evolution of the longitudinal a) and transverse b) components of the magnetizationafter the application of a radio-frequency pulse [21].
2.5 Spin-lattice relaxation time, T1
T1 quantifies the rate of transfer of energy from the nuclear spin system to the environment (the lattice).
There are different relaxation mechanisms and any process that induces magnetic field fluctuations can
be considered one. Every given relaxation process can be defined individually as :
1
T1= E2
c f(τi) (2.14)
where Ec is the intensity of the relaxation mechanism and τi the correlation times of the mecha-
nism [22]. The main relaxation mechanisms are the dipole-dipole relaxation and quadrupole relaxation.
There are other mechanisms, like chemical shift anisotropy, spin rotation and scalar relaxation that are
negligible in 1H FFC experiments.
2.5.1 Relaxation methods
Dipole-dipole relaxation
The dipole relaxation occurs by coupling between two spins and when close to each other experience
each other’s magnetic field. This leads to a slightly different effective magnetic field Beff at one spin that
depends on the orientation of both magnetic dipoles. This is the direct interaction and named the dipole-
dipole interaction. It can also be mediated through chemical bonds which is called J-couplings or indirect
dipole-dipole coupling. Roughly speaking, it arises from hyperfine interactions between the nuclei and
local electrons. The direct dipole-dipole coupling interaction is very large and depends mainly on the
distance between nuclei and the angular relationship between the magnetic field and the internuclear
vectors.
As the molecule vibrates the dipole-dipole coupling is constantly changing as the vector relationship
changes. This creates a fluctuating magnetic field at each nucleus. To the extent that these fluctuations
occur at the Larmor precession frequency, they can cause nuclear relaxation. Since the proton has
the highest magnetic dipole of common nuclei, it is the most effective nucleus for causing dipole-dipole
relaxation [23]. The range of T1 for this relaxation mechanism is between 1 ms - 100 s and its intensity
14
is given, by [22]:
Ec = γSγIh
2πr3(2.15)
Where γi are the gyromagnetic ratios of the nuclei species involved in the relaxation and r the inter-
nuclear distance. If considering equal spins, this process is responsible for a relaxation rate, R1(= T−11 ):
R1 =(µo
4π
)2 3
2γ4I~2I(I + 1)[J1(ωI) + J2(2ωI)] (2.16)
Where I is the spin, Ji(ω) the spectral density functions [14]. This functions are the Fourier transforms of
the correlation functions, Ki(τ) and can be expressed in terms of the correlation time of the dipole-dipole
interaction, τc:
Ki(τ) = Ki(0)e−|τ |/τc (2.17)
The Hamiltonian of the dipole-dipole interaction is dependent on the angle that the inter-nuclear distance
~r, makes with the external magnetic field. Due to particle motion, there is a time dependence on the
angle that provides the function of the correlation time.
The Hamiltonian of this coupling can be described using second order spherical harmonics Y2,m(θ, φ)
with m = 0,±1,±2, expressed by:
Y2,0(t) =
√5
16π[3cos2θ(t)− 1] (2.18)
Y2,1(t) = −√
15
8πsinθ(t)cosθ(t)eiφ(t) (2.19)
Y2,2(t) =
√15
32πsin2θ(t)e2iφ(t) (2.20)
The azimuthal and polar angles φ(t) and θ(t), respectively, describe the instantaneous orientation of the
coupling tensor relative to the magnetic field. The spherical harmonics relate to the correlation functions
Ki(τ), by:
Ki(τ) = Y2,m(t)Y2,−m(t+ τ) (2.21)
Where Y2,−m(t) is the complex conjugate of Y2,m. Considering the fact that the spectral density functions
are the Fourier transform of the correlation functions, and that Ki(0) is obtained by integration:
Ki(0) = Y2,i(t)2 = Y 2i =
∫ 2π
0
∫ π
0
Y 22,isinθdθdφ (2.22)
The spectral density functions can now be determined:
Jo(ω) =24
15r6τc
1 + ωτ2c(2.23)
J1(ω) =4
15r6τc
1 + ωτ2c(2.24)
J2(ω) =16
15r6τc
1 + ωτ2c(2.25)
Together with the expression of the relaxation rate, results in the relaxation rate associated with
15
rotational motion, for isotropic rotational diffusion of molecules and intra-molecular interaction of two-
spin 1/2 systems with fixed inter-nuclear distances, which is known as the BPP model [24].
R1rot =(µo
4π
)2 2γ4I~2I(I + 1)
5r6
[τc
1 + ω2τ2c+
4τc1 + 4ω2τ2c
](2.26)
Quadrupole relaxation
Quadrupole relaxation mechanism relates only to nuclei with spin I > 1/2 and that are not at the center
of tetrahedral or octahedral symmetry, since it will average out its contributions. This mechanism relates
the electric field gradient at the nucleus and the spin. The electric field gradient is responsible for a
torque on the quadrupolar nuclei, leading to molecular reorientations that cause ’friction’ between the
nucleus and the surrounding electrons. This effect is quantified on the quadrupole coupling constant
that appears on the intensity of the relaxation mechanism Ec [22]:
Ec =e2qQ
~(2.27)
Where q is the electric field gradient. The effectiveness of this relaxation mechanism is critically depen-
dent on this coupling. The contribution for the spin-lattice relaxation rate is [23] :
R1 =6I + 9
40I3(2I − 1)
(1 +
Ec
3
)E2
c τc (2.28)
The formalism of both dipole and quadrupole mechanism are very similar, leading to similar expres-
sions [18, 25] .
2.5.2 Total relaxation rate
The studies performed in FC NMR refer to nuclei with spin 1/2 (protons), and in some cases spin 1.
The predominant spin-lattice relaxation mechanism of ”like” spins 1/2 is mainly based on dipole-dipole
fluctuations. For spin 1 nuclei, the quadrupole coupling is much more efficient than dipolar interactions
(among spins of the same species) and the relaxation can be considered entirely caused by this mech-
anism, neglecting the influence of the dipolar relaxation. Cross-correlation effects [18] are negligible in
the context of field-cycling relaxometry, and the total spin-lattice relaxation, T1 in multi-spin 1/2 systems
can be represented as the sum of two-spin 1/2 relaxation rates of index i interacting with all the other
spins in pairs. Then the effective spin-lattice relaxation rate of dipolar coupled spins 1/2 [14]:
1
T1=
∑j 6=i
1
T(i,j)1
(2.29)
Where T(i,j)1 is the spin-lattice relaxation time of the specific spin i interacting with all the other spins
in the sample of the multi-spin 1/2 systems [14].
Relaxation mechanisms can be divided into two groups, the intra-molecular and intermolecular mech-
anisms. Quadrupole interaction is exclusively intra-molecular and dipole-dipole interaction can be con-
16
sidered both. Intermolecular dipolar interactions lean to fluctuate much more slowly than intra-molecular
couplings. This occurs because intermolecular dipolar interactions are governed by Brownian motions
of the molecule over distances exceeding the dimension of the same. The spin-lattice relaxation rate
resulting from both contributions may be written as
1
T1=
1
T intra1
+1
T inter1
(2.30)
This is plausible because the two contributions refers to very different time scales. While quadrupole
interaction also exists in different time scales than the previous two contributions, the same argument
can be applied for the total relaxation rate:
1
T1=
1
TDD1
+1
TQP1
(2.31)
2.6 NMR measurements and the Fast Field Cycling Principle
For a typical NMR experiment in order to measure the spin lattice relaxation time T1, an external mag-
netic field ~Bo is applied aligning the sample net magnetization. Followed by a RF pulse, it shifts the net
magnetization 90 degrees which starts realigning with external magnetic field ~Bo immediately after. This
induces a signal known as Free Induction Decay (FID). This FID is the signal induced by the sample
magnetization ~M in the transverse coil (which produces the RF pulse) to the external magnetic field ~Bo.
The RF pulse needs to be at the Larmor frequency and as it can be deduced from equation 2.6 to cause
a 90 degrees shift of the magnetization for a given gyromagnetic ratio.
The evolution of the magnetization component Mz(t) parallel to the applied magnetic field ~Bo de-
pends on its magnitude and is described by the Bloch equations 2.13. For a NMR experiment Mo = Meq
(equilibrium magnetization). The evolution of Mz(t) can be rewritten as:
dMz
dt= − 1
T1(Bo)[Mz(t)−M(eq)(Bo)] (2.32)
In a typical field cycling NMR experiment the sample is initially placed in a magnetic field BoP , where
it is polarized for a time ∆tp. Following this, the magnetic field is switched down to a lower field value BoE ,
for a time ∆tE . The goal is to polarize the sample as much as possible in order to let the magnetization
evolve by quickly switching the field from BoP to BoE (tswitching T1(BoE)). After a certain evolution
time ∆tE a new field known as the detection field BoD is applied that can have the same magnitude of
the polarization field (BoD = BoP ). A typical cycle of this technique can be observed in Figure 2.3.
In a) the variation of the applied magnetic field ~Bo is exemplified. The transitions between different
values of ~Bo must be fast but not to fast. This conditions arise from the fact that the correct requirement
for an ideal cycle is ’reversibility’. In the limit te → 0 and BoP = BoD the magnetization of the sample
in the end of the polarization phase should be replicated as the initial magnetization in the detection
phase without any entropy increment in the sample material. This is achieved by making the field tran-
sition on one hand so fast that the relaxation mechanisms are negligible (no energy transfer between
17
Figure 2.3: Typical FFC NMR cycle [1].
atoms/molecules during the transition) and on the other hand slow enough in comparison with the Lar-
mor velocity preserving the angle between ~M(t) and ~Bo(t) (known as adiabatic transition). This fast,
yet adiabatic cycle completely eliminates possible unpleasant effects arising from equation 2.32 and is
translated by the following condition [9]:
| ~Bo × d ~Bo
dt |B2
o
γBo (2.33)
In b) the sample z-component of the magnetization under the influence of a) can be observed. The
magnetization evolves according to each applied field exponentially as expected. Between t5 − δ and t5
the net magnetization drops to zero due to the RF pulse followed by its relaxation. In Table 2.3 we can
see the equation that defines the magnetization on each phase of the cycle.
In c) we can observe the magnetic impulse B1(t) that is obtained through the RF coil. This pulse has
a frequency ωo in resonance with the Larmor frequency and has a duration of δ (typically in the order of
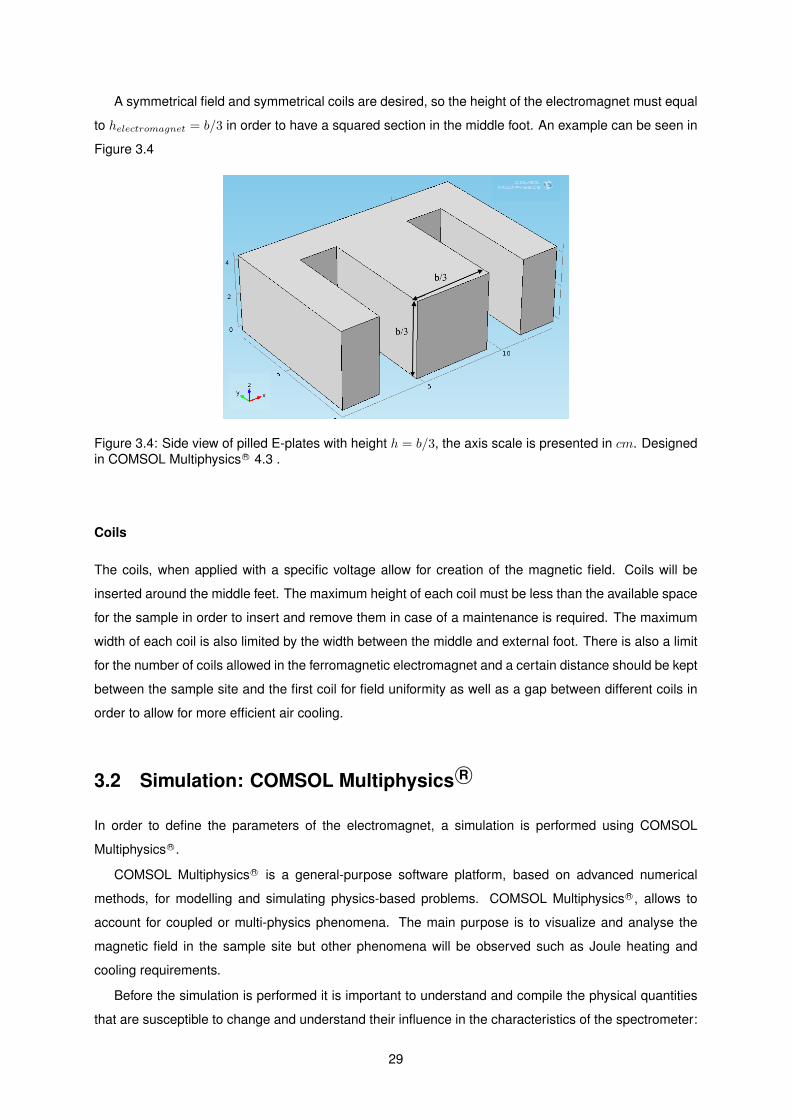
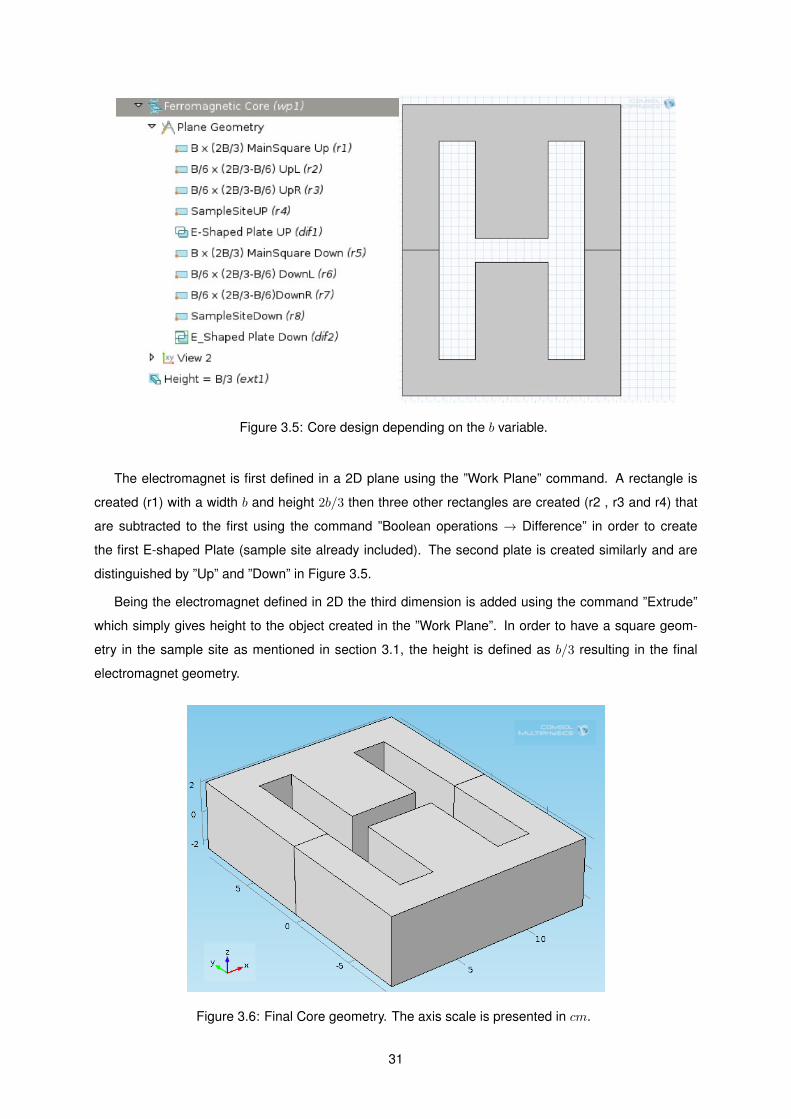
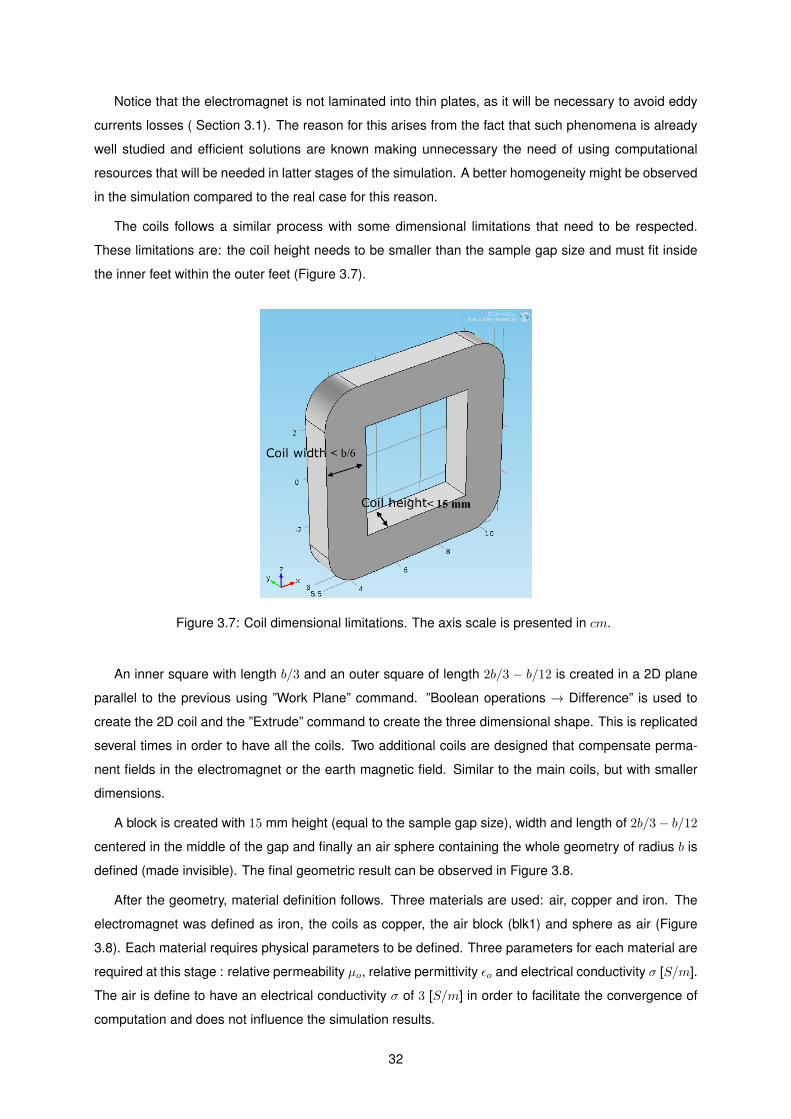
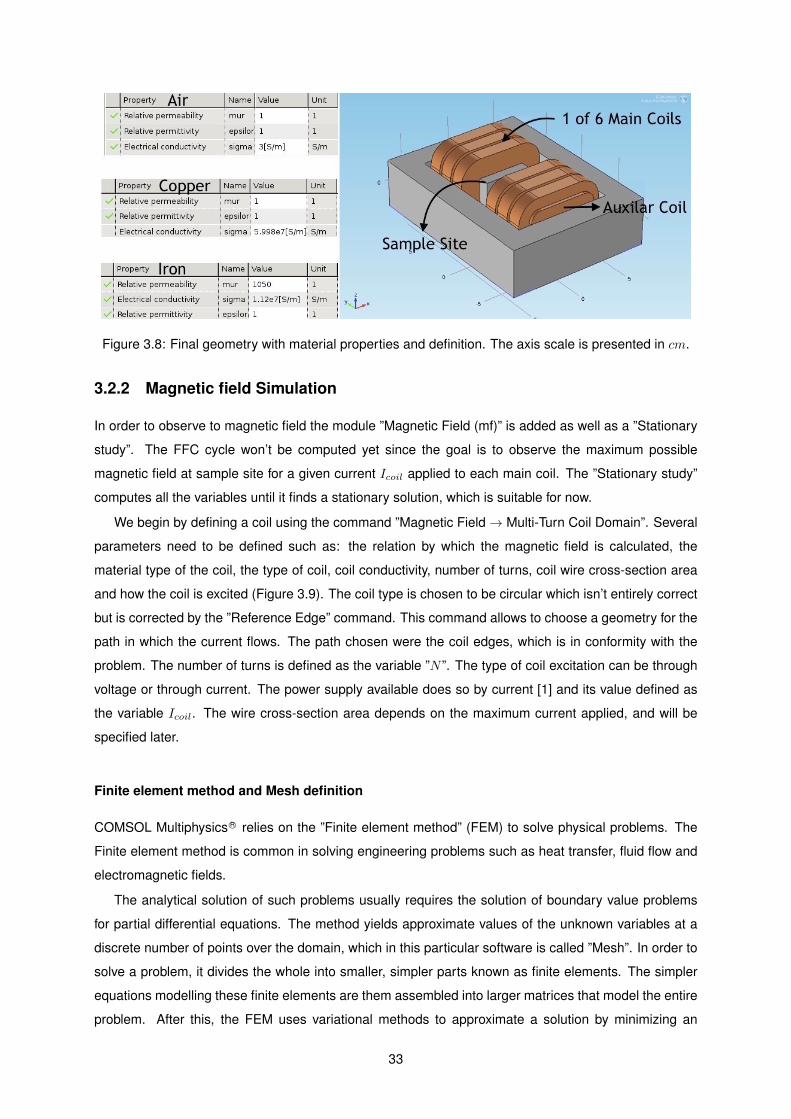
Table 3.4: Field homogeneity analysis of the y0 = 0 / y1 = 0.35 / y2 = −0.35 cm planes in the inner andouter square vertex and middle edges points. Such numerical precision in the homogeneity percentageis required otherwise it would seen a perfectly uniform surface in the inner square, which does notcorresponds to the truth.
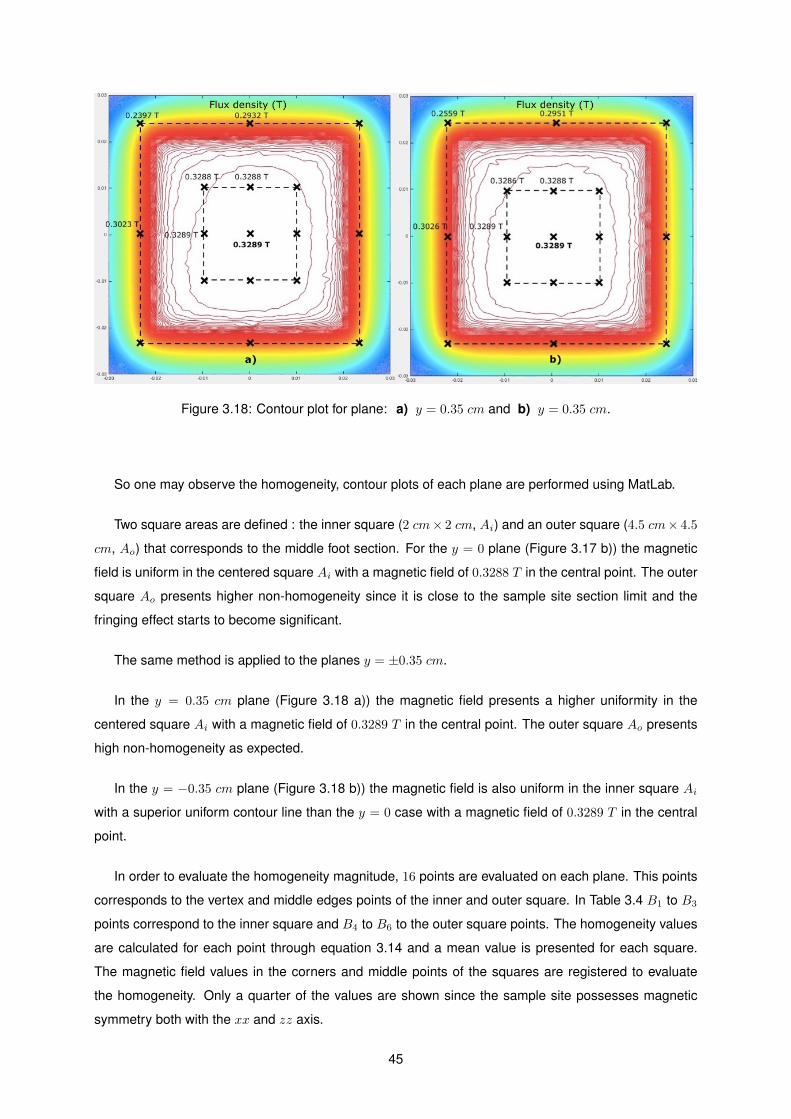
It is concluded that in the inner square (2 cm × 2 cm) exists high homogeneity in which each layer
(y = 0, y = 0.35 cm, y = −0.35 cm) the magnetic field magnitude is By=0 = 0.3288 T , By=0.35 = 0.3289 T
By=−0.35 = 0.3289 T without existing any visible contour line in the interior. A difference in the magnetic
field between the outer planes and the middle plane is observed (±0.0001 T ). In the outer square the
same can not be observed and it becomes undesirable to analyse the sample outside the inner square.
The mean values of the homogeneity are compiled next to the previous built equipment [1] in Table
3.5. The homogeneity is proven to be acceptable with similar homogeneity results for the inner square .
Plane y coordinate Case under study ’FFC 3’
0 cm 0.22% 0.20%
Table 3.5: Homogeneity values compilation along the ’FFC 3’ results [1]. The homogeneity correspondsto the Ai square. The inner square has the same dimensions as ’FFC3’ but the outer square correspondsto the area of 6× 6 cm and cannot be compared. These is the only comparable result.
46
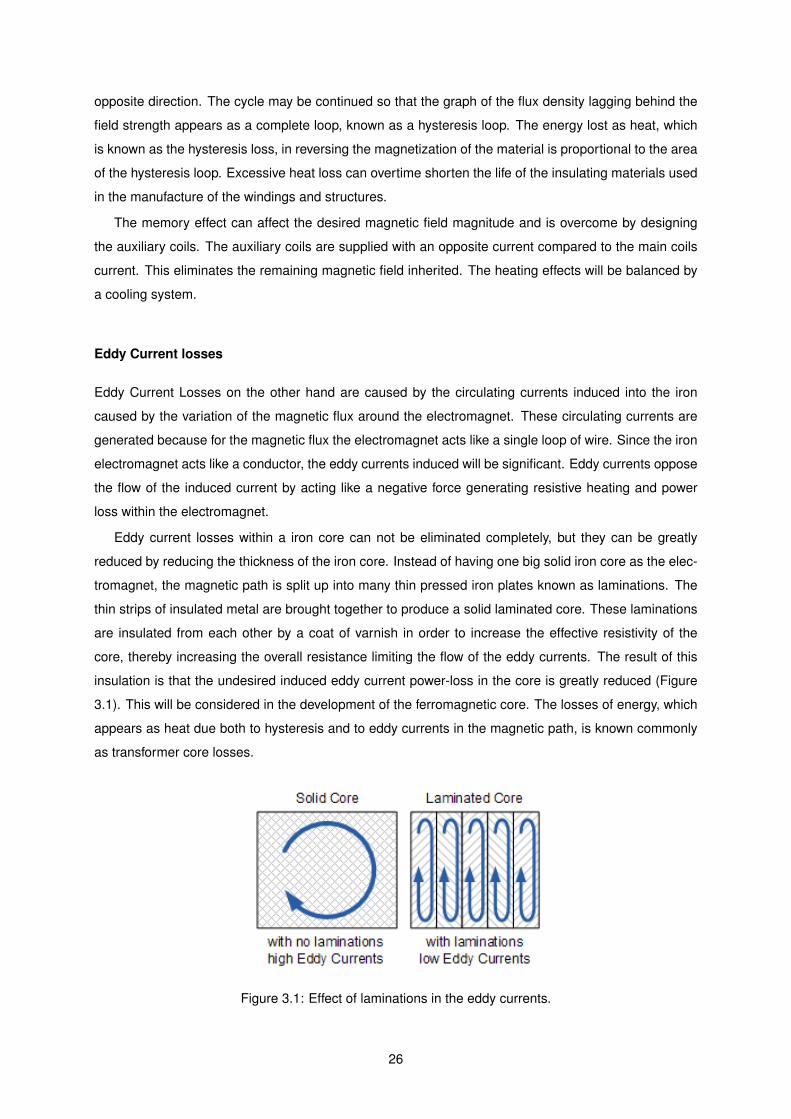
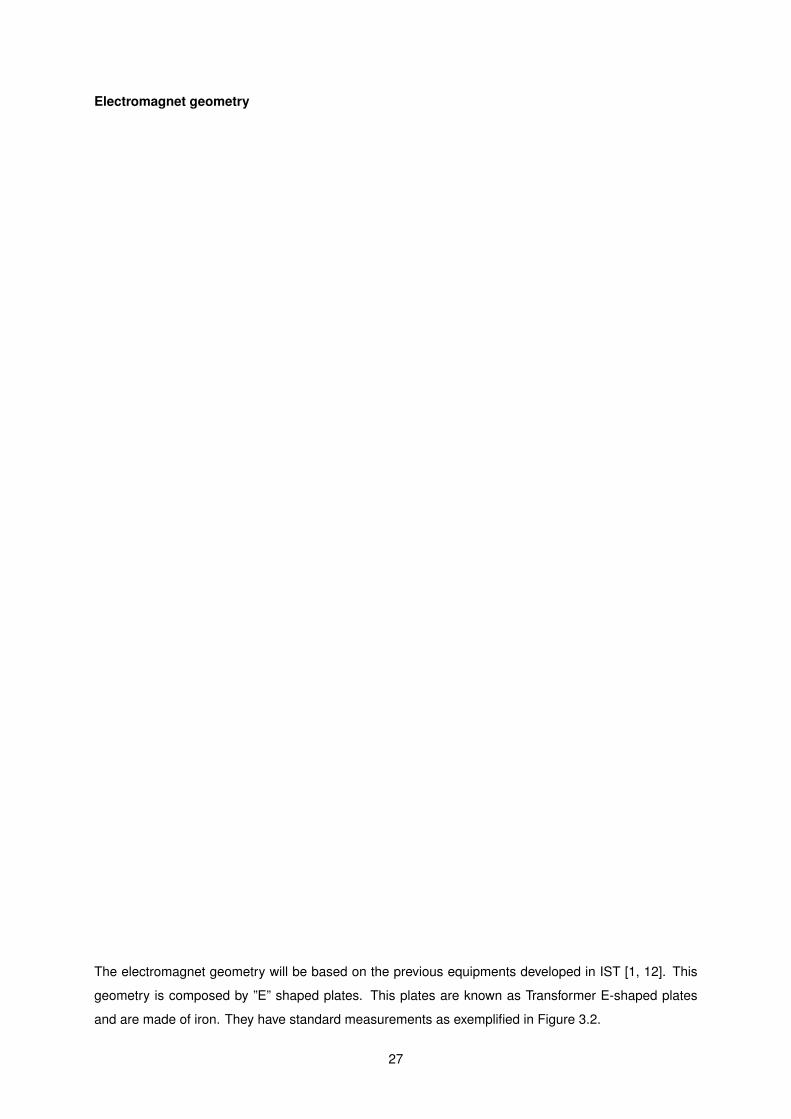
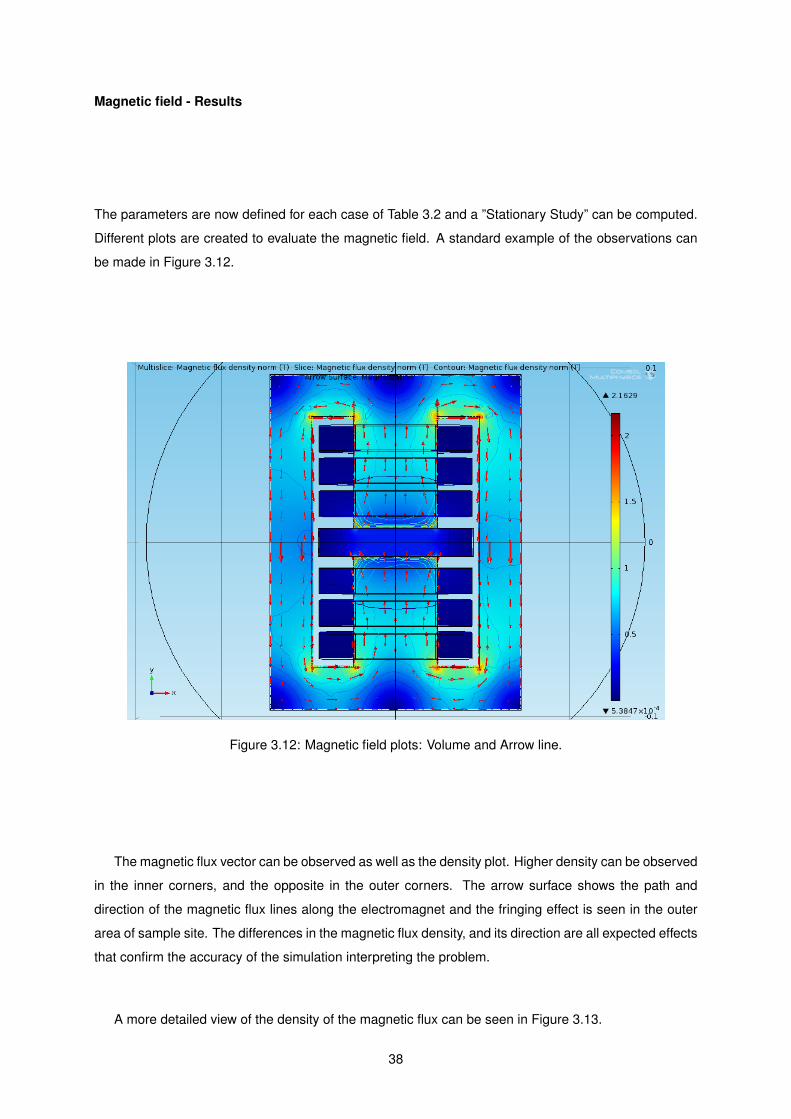
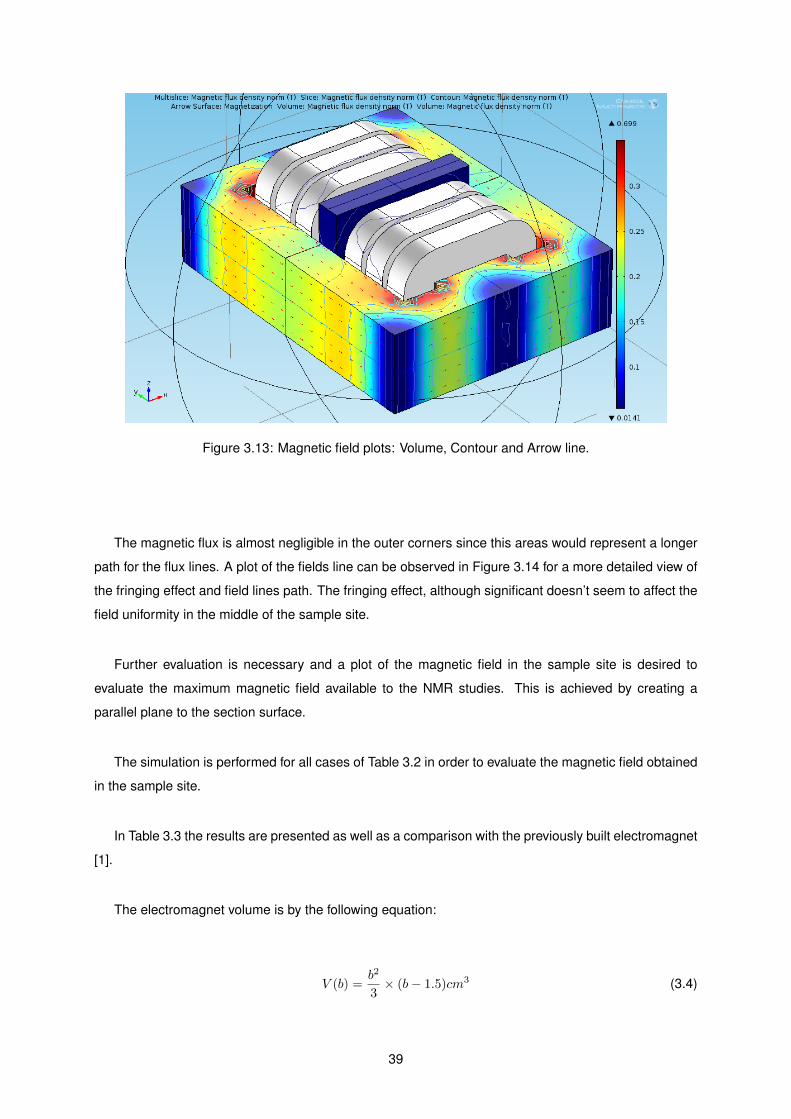
3.2.4 Fringing Effect
As mentioned before, the magnetic flux alternates between iron and air. This leads to a frigging effect
which is observed in the simulation, Figure 3.14. The magnetic flux lines cease to be straight and parallel
leading to non-uniform field. Therefore it becomes important to take this phenomenon into account.
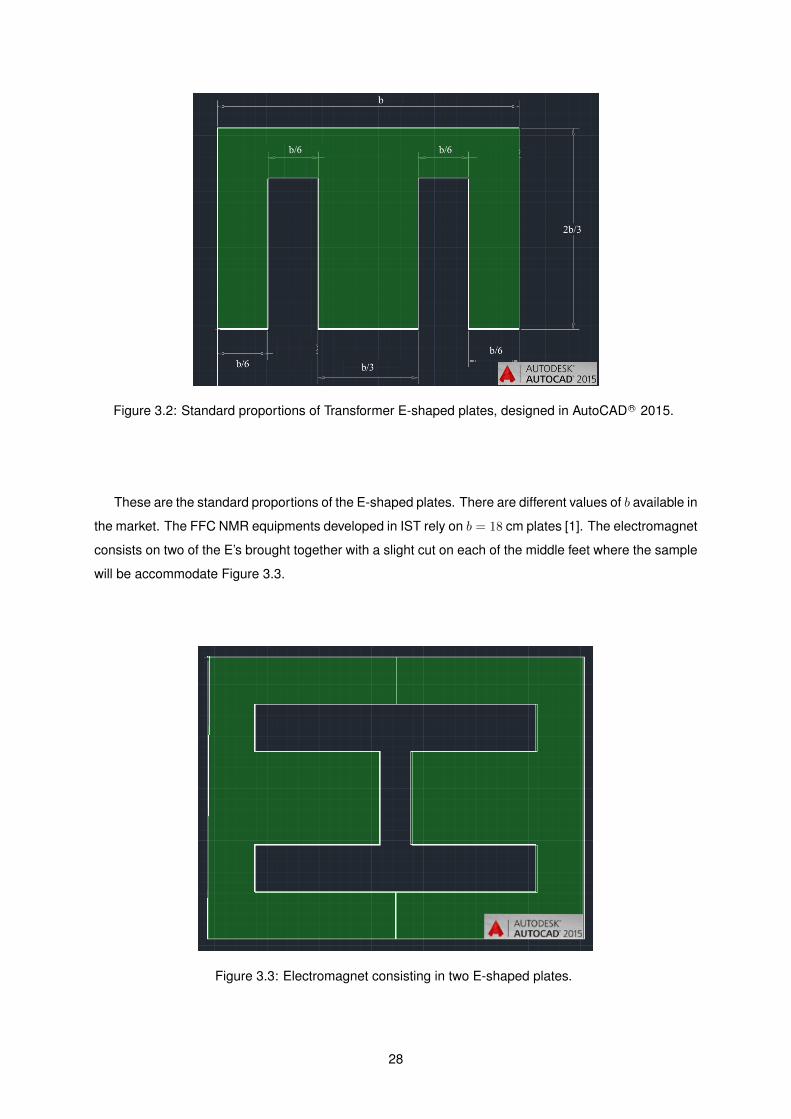
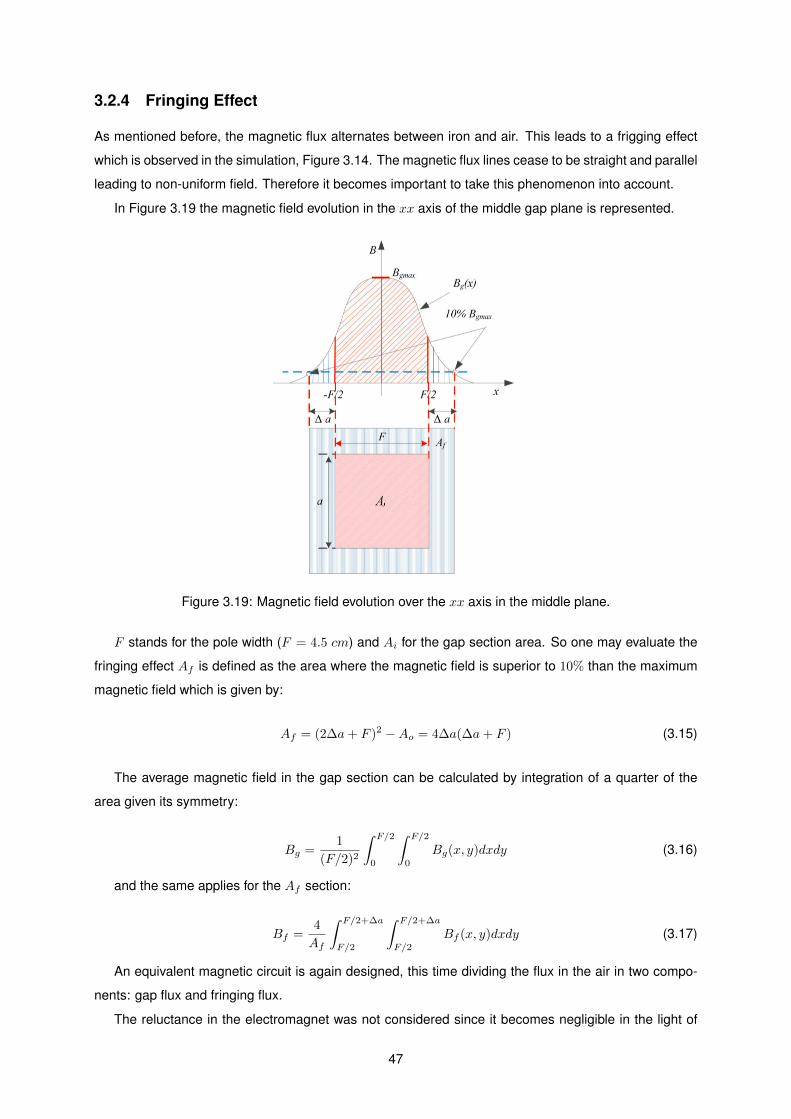
In Figure 3.19 the magnetic field evolution in the xx axis of the middle gap plane is represented.
Figure 3.19: Magnetic field evolution over the xx axis in the middle plane.
F stands for the pole width (F = 4.5 cm) and Ai for the gap section area. So one may evaluate the
fringing effect Af is defined as the area where the magnetic field is superior to 10% than the maximum
magnetic field which is given by:
Af = (2∆a+ F )2 −Ao = 4∆a(∆a+ F ) (3.15)
The average magnetic field in the gap section can be calculated by integration of a quarter of the
area given its symmetry:
Bg =1
(F/2)2
∫ F/2
0
∫ F/2
0
Bg(x, y)dxdy (3.16)
and the same applies for the Af section:
Bf =4
Af
∫ F/2+∆a
F/2
∫ F/2+∆a
F/2
Bf (x, y)dxdy (3.17)
An equivalent magnetic circuit is again designed, this time dividing the flux in the air in two compo-
nents: gap flux and fringing flux.
The reluctance in the electromagnet was not considered since it becomes negligible in the light of
47
Figure 3.20: Simplified equivalent magnetic circuit.
the air reluctance. <g and φg are the reluctance and magnetic flux of the air in the gap respectively. The
same stands for Rf and φf , this time for the fringing effect.
Through the equivalent magnetic circuit it is possible to obtain the total magnetic flux:
Φt = Lti ↔ Lt =Φt
i=
Nφt
i=
N(φg + φf )
i= N2Pg +N2Pf (3.18)
Where Pg and Pf stand for the permeance. The total inductance is given by :
Lt = Lg + LL = Lg
(1 +
LL
Lg
)(3.19)
Lg stands for the magnetization inductance, and LL for the leakage inductance. The previous ex-
pression allows us to define the fringing factor as expressed in the following expression [26]:
Ff = 1 +Af lgAilf
(3.20)
Where lg and lf are the magnetic flux gap and fringing length. This length is the size of the path of
the magnetic flux lines.
In the gap this lines should be the same as the gap width (1.5 cm) but the fringing area a superior
length is observed given their curvy form. The average fringing length is given by:
lf = lgBg
Bf(3.21)
Using the results from the simulation and the expression 3.20 it is possible to plot the fringing effect
vs. lg by changing the gap size in the simulation. This allows for an evaluation of the evolution of the
fringing effect over different gap sizes. The results are plotted next to the MacLyman [27] and Roque [1]
results. The expression used in this work is the same as Roque’s, while MacLyman expression is:
Ff = 1 +lgaln(2hlg
)(3.22)
The results are very similar in its evolution where the highest fringing factors belong to this work. The
fringing factor Ff for the 1.5 cm gap case is 2.16. The fringing factor arises from an imperfectly-coupled
48
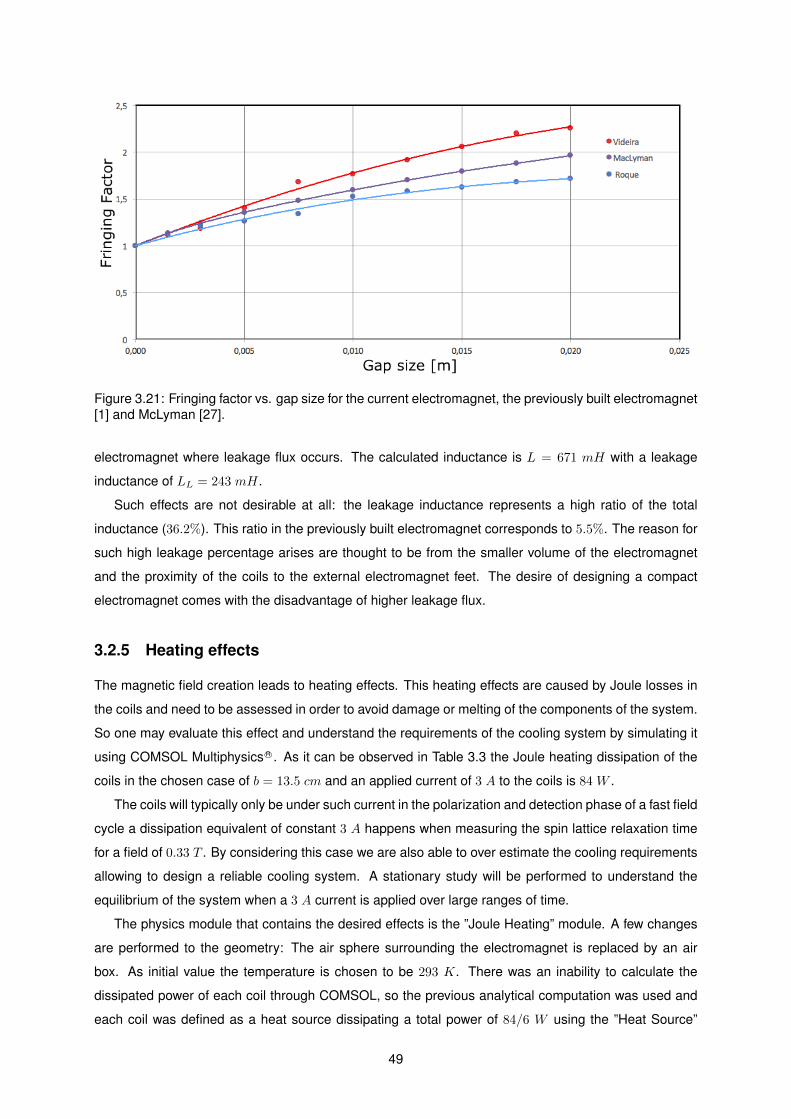
Figure 3.21: Fringing factor vs. gap size for the current electromagnet, the previously built electromagnet[1] and McLyman [27].
electromagnet where leakage flux occurs. The calculated inductance is L = 671 mH with a leakage
inductance of LL = 243 mH.
Such effects are not desirable at all: the leakage inductance represents a high ratio of the total
inductance (36.2%). This ratio in the previously built electromagnet corresponds to 5.5%. The reason for
such high leakage percentage arises are thought to be from the smaller volume of the electromagnet
and the proximity of the coils to the external electromagnet feet. The desire of designing a compact
electromagnet comes with the disadvantage of higher leakage flux.
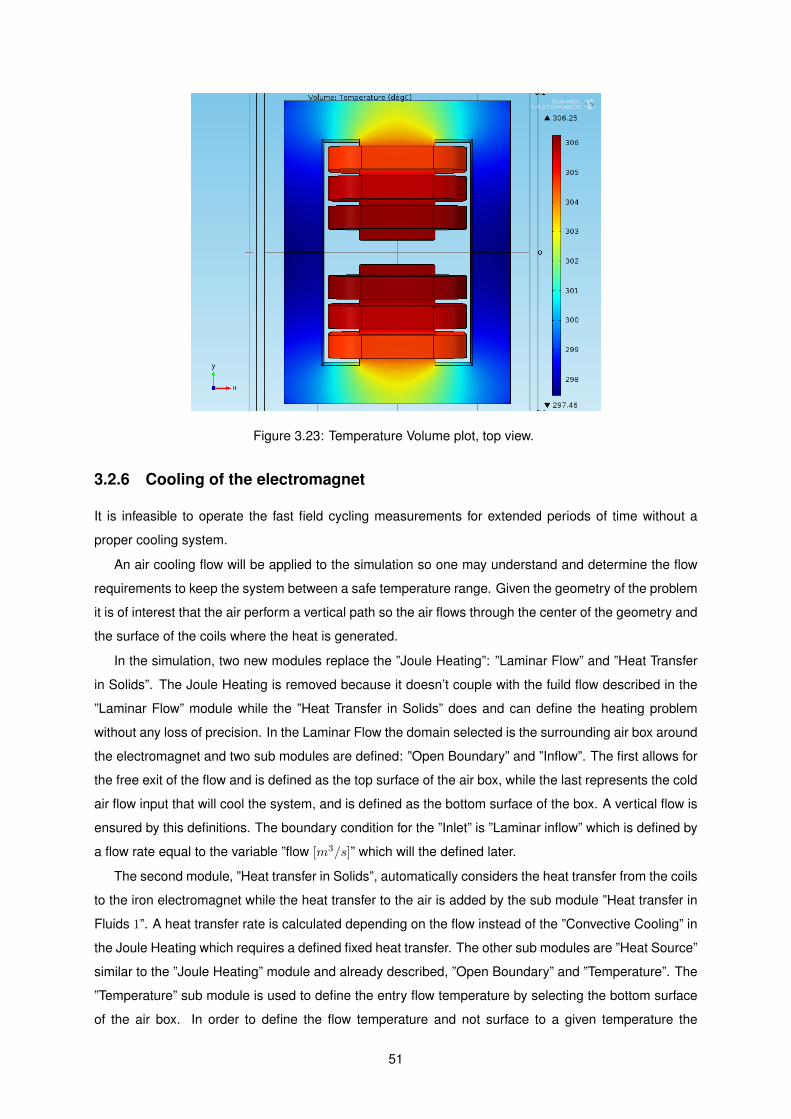
3.2.5 Heating effects
The magnetic field creation leads to heating effects. This heating effects are caused by Joule losses in
the coils and need to be assessed in order to avoid damage or melting of the components of the system.
So one may evaluate this effect and understand the requirements of the cooling system by simulating it
magnetic field of 0.329 T , also confirmed by the equivalent magnetic circuit and according to analytical
calculations the coils have a total ohmic resistance of 9.3 Ω and maximum joule losses of 84 W for a
current of 3 A. Field homogeneity was also evaluated as well as evaluation of the heating effect of the
dissipated heat on the electromagnet, with and without forced air flow. In this chapter it is intended to
experimentally evaluate this physical quantities provided by the simulation and analytical calculations.
4.1 Electromagnet
The desired parameters of the electromagnet were designed and compiled. The electromagnet was
built by outsourcing all the parts: from the electromagnet to the coils, and rectification of the sample
site section. Two additional coils were added to serve the purpose of auxiliary coils, which compensate
permanent magnetizations of the electromagnet and the earth magnetic field. This coils are composed
of 430 turns each with a copper wire of 0.25mm diameter. The built electromagnet can be seen in Figure
4.1.
57
Figure 4.1: Specially developed Magnetic Core for a NMR FFC spectrometer: 4.5 cm height built of ironstandard E shaped transformer plates with 13.5 cm width, 1.5 cm gap in the middle foot, six coils with218 turns each, maximum current of 3 A and maximum achievable magnetic field of 0.329 T .
4.2 Experimental measurements
4.2.1 Coil electrical resistance
In order to evaluate the total resistance of the coils, a DC experiment measuring the current and drop
voltage was performed. The electrical resistance is indirectly calculated by R = V/I.
The experimental resistance is 9.6± 0.1 Ω compared to the 9.3 Ω expected by the theory.
4.2.2 Coil Inductance
The inductance of the coils come as an important parameter due to its relation with the current variations
necessary for field cycling. A direct measurement of the inductance was performed for all the six coils
with an inductance-meter which revealed : L = 544.5 ± 0.1 mH. The auxiliary coils both measured an
inductance of L = 134.2± 0.1 mH.
Another method was used to calculate the inductance, as well as the leakage inductance. The set-up
consisted in an auto-transformer, and measurement equipment of both the current and voltage in the
magnetic electromagnet using AC current. The set-up can be observed in Figure 4.2.
58
Figure 4.2: Experimental set-up in order to evaluate the magnetic field vs. position in the sample middleplane.
Two combination of coils were used: all six coils connected as usually (additive mode) and in another
case half the coils fed by an opposite current in order to neutralize the field created by the other half
(subtractive mode). Measuring both current and voltage , the impedance, Z can be calculated and by
knowing the resistance, the inductance L. In the subtractive mode the calculated L corresponds to the
leakage inductance LL.
I (A) V (V ) Z (Ω) L (mH)0.2 41.8 209.0 664.90.4 83.7 209.3 665.70.6 123.3 205.5 653.70.8 164.5 205.6 654.11.0 204.6 204.6 650.1
Mean value : 657.7 mH
Table 4.1: Impedance results from the additive mode.
I (A) V (V ) Z (Ω) Lleakage (mH) (L× 100)/LL%0.2 15.2 76.0 239.9 36.090.4 29.1 72.8 229.5 34.480.6 43.0 71.7 226.1 34.580.8 57.2 71.5 225.5 34.471.0 71.6 71.6 225.8 34.70
Mean Values: 229.4 mH 34.9
Table 4.2: Leakage impedance results from the subtractive mode.
Using the AC current method an inductance of L = 657.7 ± 0.1 mH was obtained, and a leakage
inductance of LL = 229.4 mH which corresponds to 34.7% of the total inductance. This confirms the
predictions of the simulation about the leakage flux. Leakage flux, as mentioned before is thought to
arise from two factors: small electromagnet volume and proximity of the coils to the external feet. This
proximity might prevent the lines to close properly and a higher distance would therefore reduce the
fringing effect and leakage ratio. The first hypothesis is confirmed by the previously built electromagnet
59
[1] given the lower fringing ratio (1.62 against the 2.16 of the current work) and leakage ratio (5.5% against
36.2% in the simulations) for a similar distance between feet (3 cm against the 2.25 of the current work)
and a bigger magnetic electromagnet (standard plates measurement of 18 cm against 13.5 cm of the
current work).
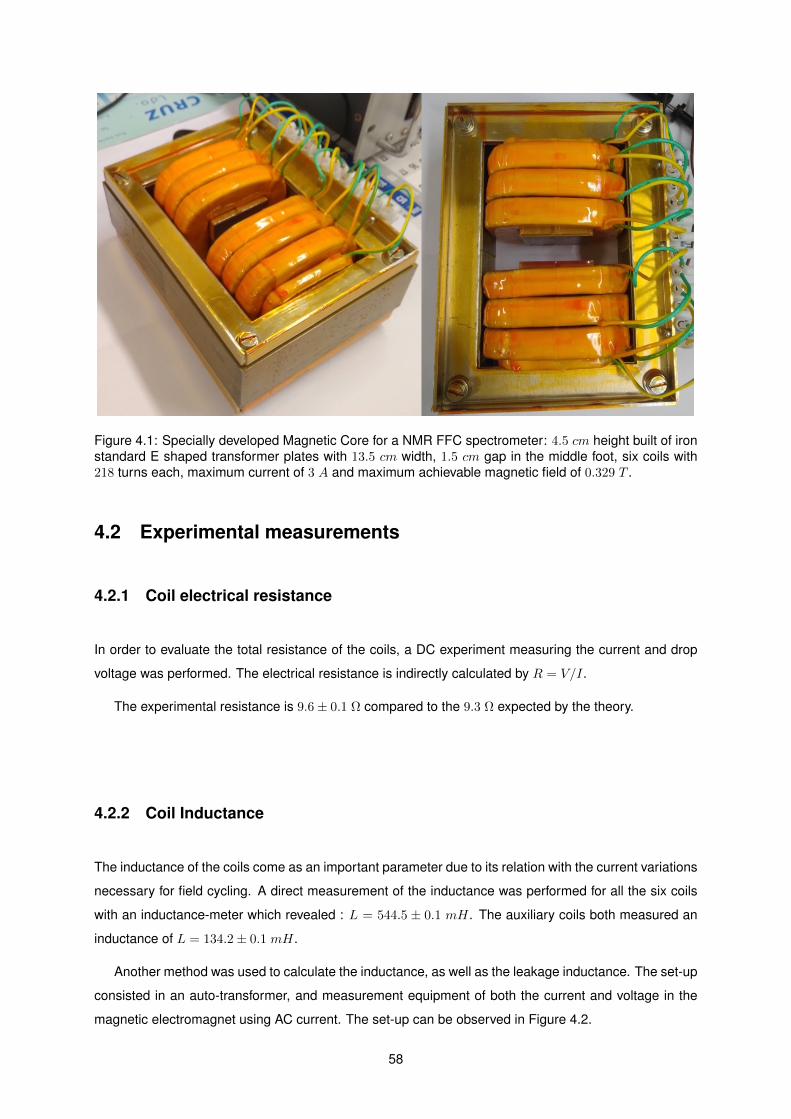
In order to evaluate the impact of the proximity of the coils to the external feet a new fringing factor
as Section 3.2.4. The original distance between internal and external feet is 2.25 cm, where only a few
millimetres are left between the coil and the external feet. The new characteristic was calculated for
a distance between feet of 5 cm which means a distance > 2.75 cm between coils and external feet.
The fringing factor vs. gap size of the built electromagnet case (2.25 distance between feet), the 5 cm
distance, and the previously built electromagnet (b=18 cm and distance between feet of 3 cm) is plotted
in Figure 4.3.
Figure 4.3: Fringing factor vs. Gap Size for the current case (2.25 cm distance between feet), the 5 cmfeet distance, and the previously built electromagnet (b=18 cm with 3 cm distance between feet).
Both the Fringing factor and leakage flux present lower values for the 5 cm case than the current
case. Despite the confirmation of the contribution of the feet distance to the fringing effect and flux
leakage, Roque’s characteristic reveals a significant smaller fringing effect. It is thought that the main
factor for high fringing effect and leakage ratio is the electromagnet volume. Other possible contributor
factor might be proximity between coils and loop length. Such factors vary between the Roque’s case
compared to the simulated cases and in order to reach proper conclusions such factors should be
isolated and tested for further analysis.
60
4.2.3 Magnetic field magnitude measurement
The magnetic field magnitude over multiple planes vs. position was obtained through the simulation
and evaluated. An experimental evaluation of the same kind is performed. The experimental set-up
consisted in the magnetic electromagnet fed by a power supply, where both a ammeter and a voltmeter
were embedded in the circuit in order to have a thoroughly evaluation of this physical quantities. A Hall
Sensor (Model: GM-5180) was attached to a XY Table which controlled its position along the desired
area.
Figure 4.4: Experimental set-up in order to evaluate the magnetic field vs. position in the sample middleplane.
Figure 4.5: X Y table detail.
61
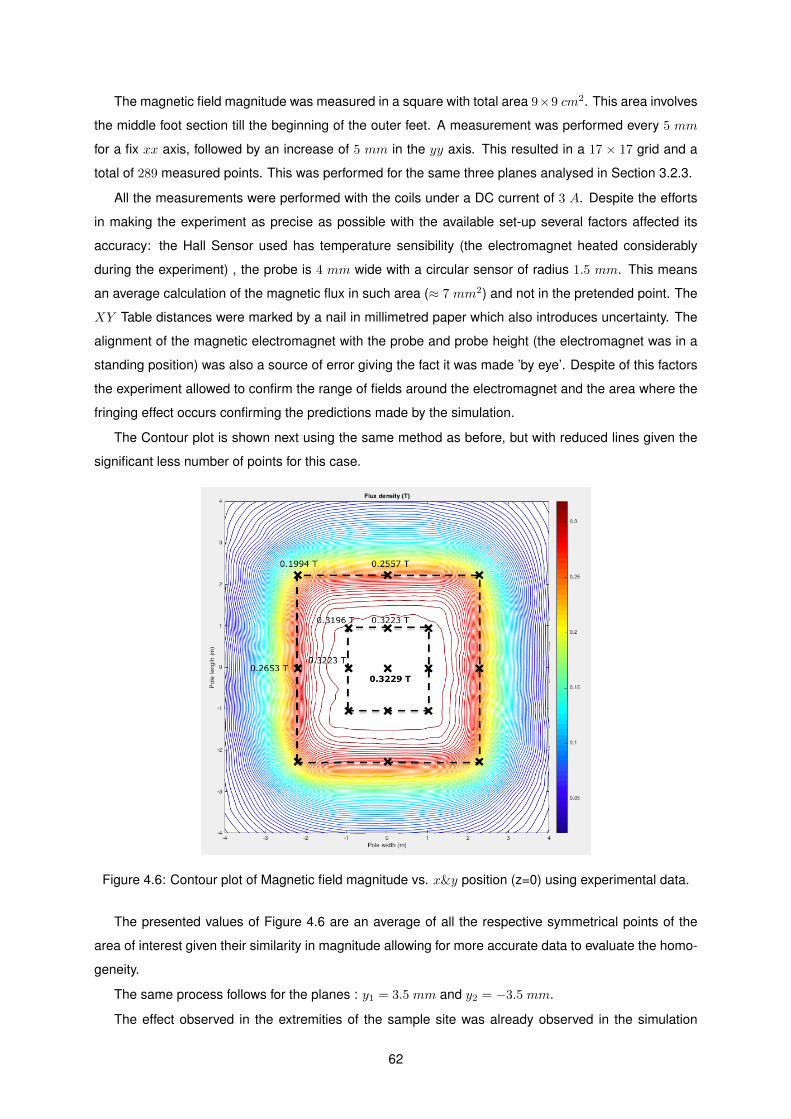
The magnetic field magnitude was measured in a square with total area 9×9 cm2. This area involves
the middle foot section till the beginning of the outer feet. A measurement was performed every 5 mm
for a fix xx axis, followed by an increase of 5 mm in the yy axis. This resulted in a 17 × 17 grid and a
total of 289 measured points. This was performed for the same three planes analysed in Section 3.2.3.
All the measurements were performed with the coils under a DC current of 3 A. Despite the efforts
in making the experiment as precise as possible with the available set-up several factors affected its
accuracy: the Hall Sensor used has temperature sensibility (the electromagnet heated considerably
during the experiment) , the probe is 4 mm wide with a circular sensor of radius 1.5 mm. This means
an average calculation of the magnetic flux in such area (≈ 7 mm2) and not in the pretended point. The
XY Table distances were marked by a nail in millimetred paper which also introduces uncertainty. The
alignment of the magnetic electromagnet with the probe and probe height (the electromagnet was in a
standing position) was also a source of error giving the fact it was made ’by eye’. Despite of this factors
the experiment allowed to confirm the range of fields around the electromagnet and the area where the
fringing effect occurs confirming the predictions made by the simulation.
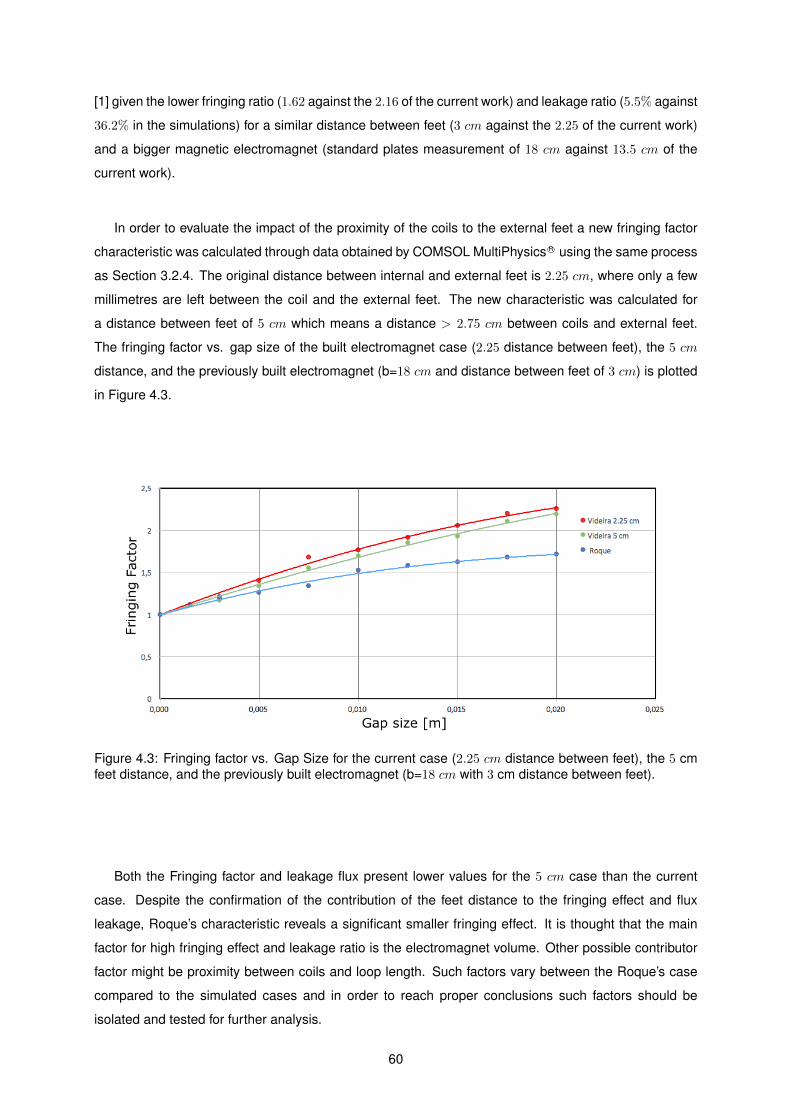
The Contour plot is shown next using the same method as before, but with reduced lines given the
significant less number of points for this case.
Figure 4.6: Contour plot of Magnetic field magnitude vs. x&y position (z=0) using experimental data.
The presented values of Figure 4.6 are an average of all the respective symmetrical points of the
area of interest given their similarity in magnitude allowing for more accurate data to evaluate the homo-
geneity.
The same process follows for the planes : y1 = 3.5 mm and y2 = −3.5 mm.
The effect observed in the extremities of the sample site was already observed in the simulation
62
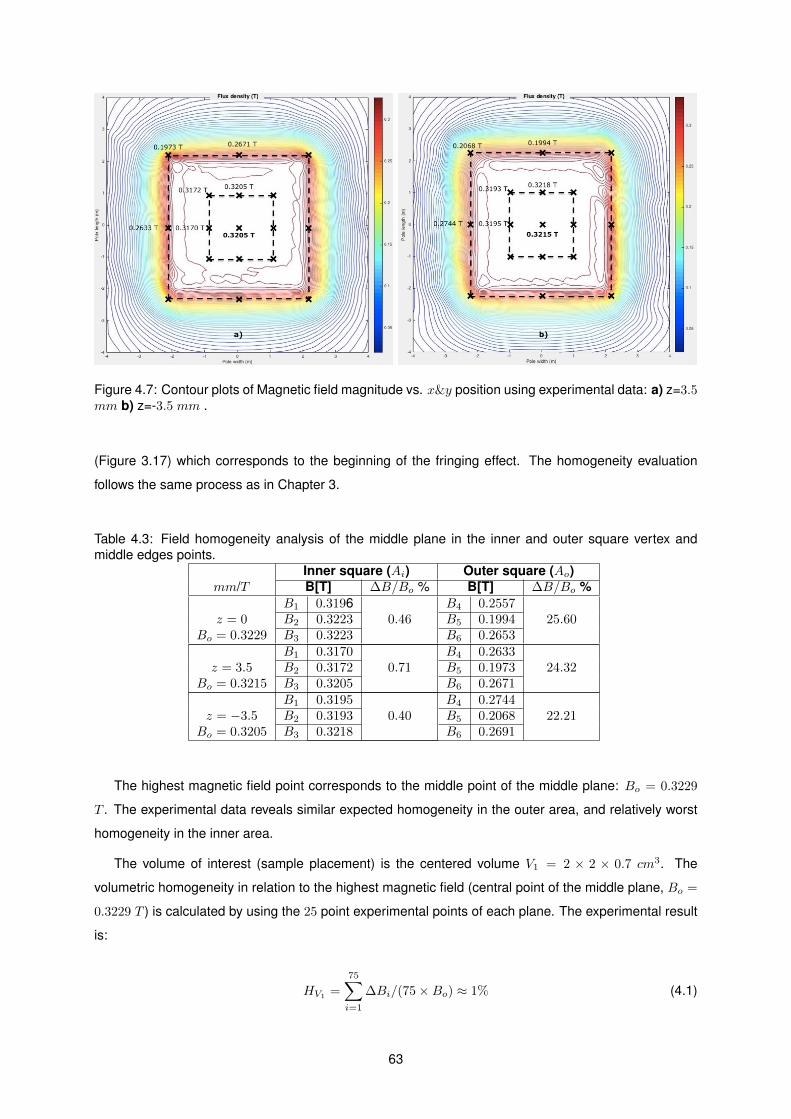
Figure 4.7: Contour plots of Magnetic field magnitude vs. x&y position using experimental data: a) z=3.5mm b) z=-3.5 mm .
(Figure 3.17) which corresponds to the beginning of the fringing effect. The homogeneity evaluation
follows the same process as in Chapter 3.
Table 4.3: Field homogeneity analysis of the middle plane in the inner and outer square vertex andmiddle edges points.
The highest magnetic field point corresponds to the middle point of the middle plane: Bo = 0.3229
T . The experimental data reveals similar expected homogeneity in the outer area, and relatively worst
homogeneity in the inner area.
The volume of interest (sample placement) is the centered volume V1 = 2 × 2 × 0.7 cm3. The
volumetric homogeneity in relation to the highest magnetic field (central point of the middle plane, Bo =
0.3229 T ) is calculated by using the 25 point experimental points of each plane. The experimental result
is:
HV1 =
75∑i=1
∆Bi/(75×Bo) ≈ 1% (4.1)
63
4.3 Coupled systems, assembly and casing
The electromagnet will operate inside a casing along with the remaining support systems which are:
Sample Heating; Cooling; RF coil.
The electromagnet was not fully built during the length of this work. Despite of this fact the projection
of missing parts was performed as far as the time allowed. For the rest of this Chapter, gathered
information, projections and considerations for the rest of the spectrometer are described.
4.3.1 Sample heating
The spectrometer must be able to heat the test samples to temperatures up to 150 C. This is achieved
by heated air and such system must be designed in order not to heat the electromagnet or other spec-
trometer components.
The components that constitute the heating system are: Input valve, air heater, a specially designed
component, glass structure, connection tubes and a thermocouple. The input valve function is to receive
air at room temperature from an outer independent system and guide it to the air heater, and is yet to
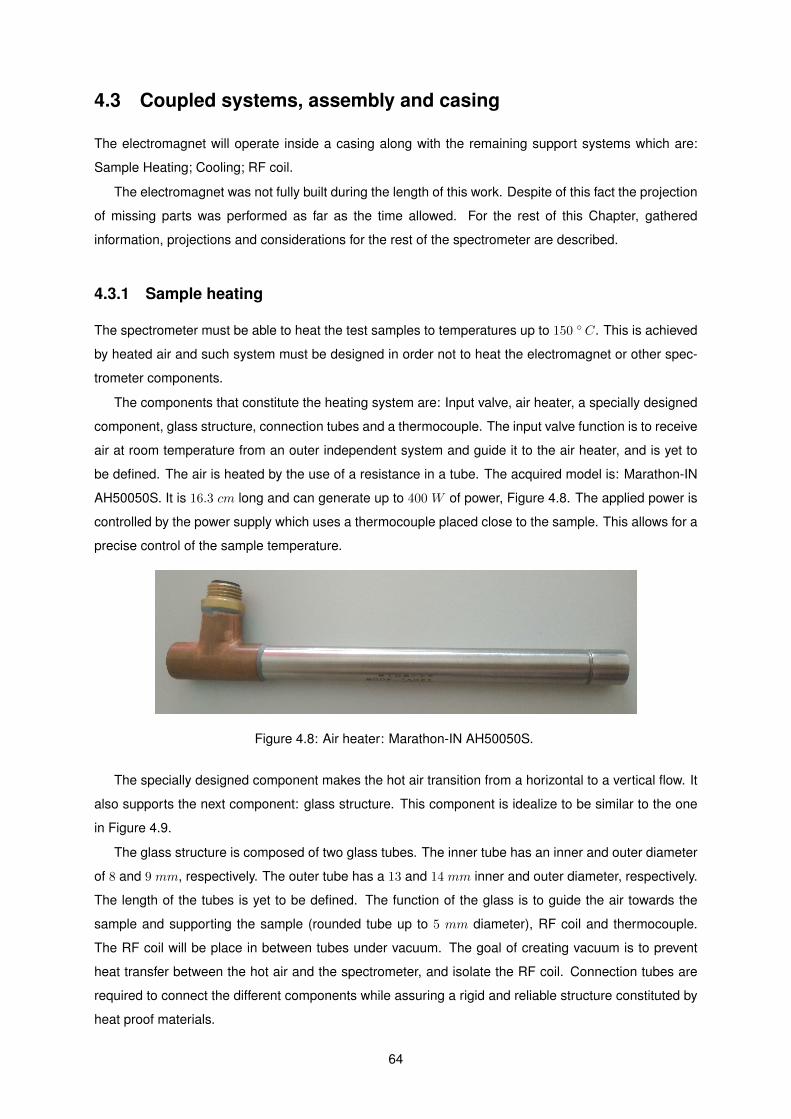
be defined. The air is heated by the use of a resistance in a tube. The acquired model is: Marathon-IN
AH50050S. It is 16.3 cm long and can generate up to 400 W of power, Figure 4.8. The applied power is
controlled by the power supply which uses a thermocouple placed close to the sample. This allows for a
precise control of the sample temperature.
Figure 4.8: Air heater: Marathon-IN AH50050S.
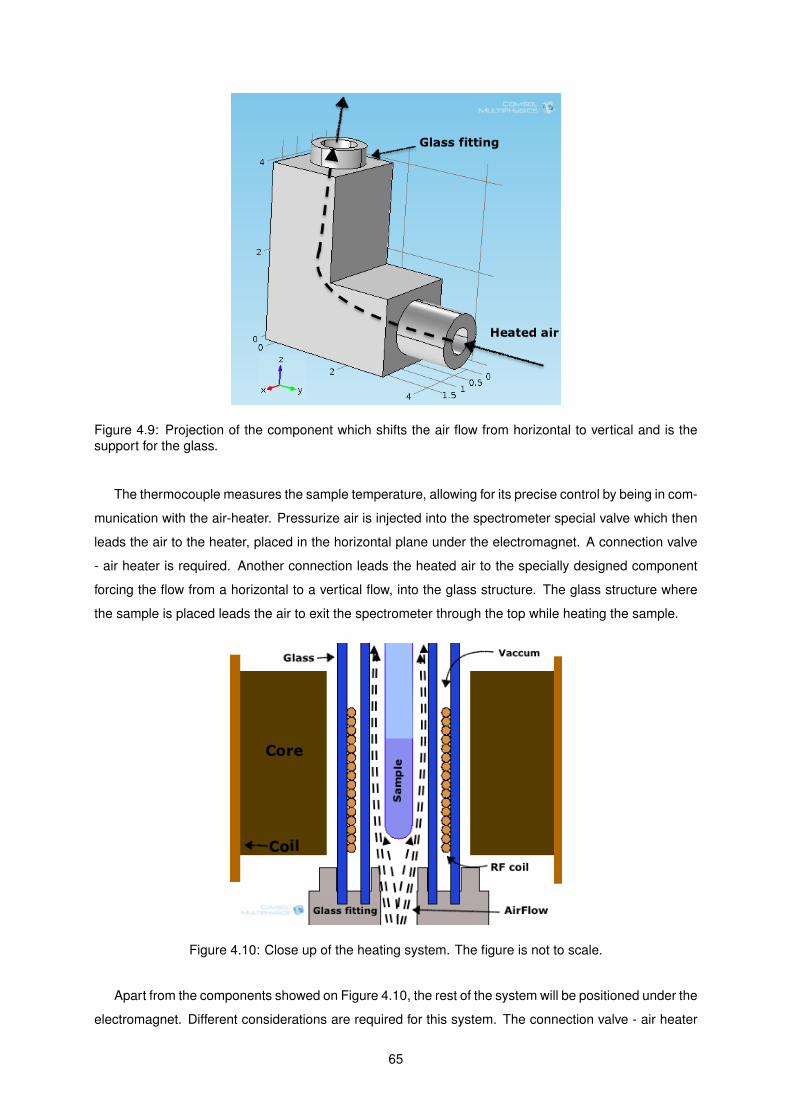
The specially designed component makes the hot air transition from a horizontal to a vertical flow. It
also supports the next component: glass structure. This component is idealize to be similar to the one
in Figure 4.9.
The glass structure is composed of two glass tubes. The inner tube has an inner and outer diameter
of 8 and 9 mm, respectively. The outer tube has a 13 and 14 mm inner and outer diameter, respectively.
The length of the tubes is yet to be defined. The function of the glass is to guide the air towards the
sample and supporting the sample (rounded tube up to 5 mm diameter), RF coil and thermocouple.
The RF coil will be place in between tubes under vacuum. The goal of creating vacuum is to prevent
heat transfer between the hot air and the spectrometer, and isolate the RF coil. Connection tubes are
required to connect the different components while assuring a rigid and reliable structure constituted by
heat proof materials.
64
Figure 4.9: Projection of the component which shifts the air flow from horizontal to vertical and is thesupport for the glass.
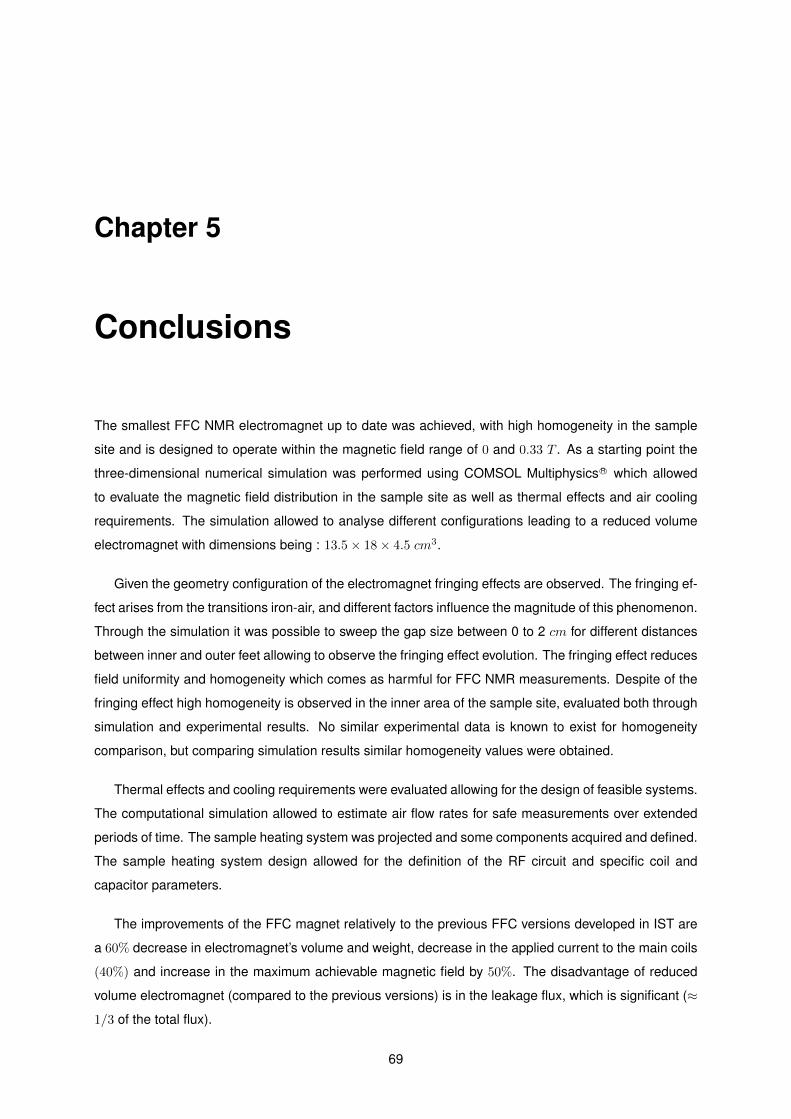
The thermocouple measures the sample temperature, allowing for its precise control by being in com-
munication with the air-heater. Pressurize air is injected into the spectrometer special valve which then
leads the air to the heater, placed in the horizontal plane under the electromagnet. A connection valve
- air heater is required. Another connection leads the heated air to the specially designed component
forcing the flow from a horizontal to a vertical flow, into the glass structure. The glass structure where
the sample is placed leads the air to exit the spectrometer through the top while heating the sample.
Figure 4.10: Close up of the heating system. The figure is not to scale.
Apart from the components showed on Figure 4.10, the rest of the system will be positioned under the
electromagnet. Different considerations are required for this system. The connection valve - air heater
65
is to be made by a flexible tube of any material as long as the connection is reliable and well coupled
in both ends but the connection between the end of the air-heater to a component yet to be designed
leads air at high temperature and an according material must be used. This component is required to
have a rigid structure able to provide a steady support of the glass, to handle high temperatures and
to be fixed on the basis of the spectrometer. Positioning of the sample and RF coil must be within the
volume centered in the electromagnet gap of dimensions: 2 × 2 × 0.7 cm3 where the magnetic field
presents its higher homogeneity. This is achieved by centering the glass structure according to Figure
4.11 (electromagnet top view) and making sure the middle of the RF coil is positioned in the center of
the gap in the vertical plane.
Figure 4.11: Top view of the electromagnet and heating system. Centered positioning of the glassstructure.
4.3.2 Radio Frequency Coil
The Radio frequency coil allows for magnetization shifts and signal acquisition. The Radio frequency
circuit is constituted by a coil and a capacitor which can both apply a RF pulse and receive NMR signals.
For the correct acquisition of NMR results, both the LC circuit , applied signal to the RF coil and sample’s1H Larmor frequency need to be in resonance.
Despite the electromagnet is designed to reach a maximum magnetic field of ≈ 0.33 T the current
power supply is designed according to the previous versions of the FFC equipments. The Radio Fre-
quency control system of the power supply is matched to the previous maximum magnetic field and
Larmor frequency: 0.21 T and 8.862 MHz. This means that given the available power supply the elec-
tromagnet is required to operate at a maximum field of 0.21 T and the RF generator matched to a
resonance frequency of 8.862 MHz.
The RF coil should be small enough to fit the electromagnet gap but big enough to allow for sample
insertion. The coil is placed around the inner edge of the outer glass tube. It is intended to use a 0.4
66
mm diameter wire for the coil with 2 cm length which require 50 turns. The inductance of a coil can be
calculated by expression 4.2.
L =N2 (d/2)
2
9(d/2 + 10l)≈ 15µH (4.2)
Where N is the number of turns, d the coil diameter and l the coil length. There are different possible
configurations that can syncronize the RF circuit to a given frequency range, being the simplest one a
RLC circuit. The resonance of such circuit is given by:
ωo =1√LC
(4.3)
Where C stands for the capacitance. For an inductance of ≈ 15 µH and a desired resonance
frequency of 8.862 MHz the capacitance is:
C =1
Lω2o
≈ 21pF (4.4)
The set back of such configuration is that in resonance, the circuit impedance becomes very low
which implies high current values.
Two possible alternatives are possible to reduce the maximum magnetic field created by the electro-
magnet: by lowering the applied current to 2 A (equation 3.13), or by removing two symmetrical coils
(four coils should reach a magnetic field of ≈ 0.22 T ). Reducing the current is beneficial in terms of the
Joule losses (from 84 to 37 W ). The removal of two symmetrical coils reduces the Joule losses (from
84 to 60 W ) but also allows for bigger distance in-between coils (facilitating air cooling) and increase the
distance from coils to the electromagnet gap (favoring field homogeneity).
4.3.3 Cooling System
The cooling system relies on cold air flow to assure thermal stability of the electromagnet. A vertical
flow is required through the middle of the electromagnet and two openings in the casing: inlet and outlet.
This openings do not require to be horizontal as long as the air flow is forced into a vertical path. The
vertical flow might require to perform a downward path given the positioning of the heating system. The
heating system (positioned below the electromagnet) might heat the air significantly before it reaches
the electromagnet compromising the cooling effects. Further evaluation of the problem is required. The
fan or fans used could be either axial or radial as long as their dimensions are small enough to fit the
casing while being able to operate for long periods of time.
67
4.3.4 Assembly
The electromagnet and coupled systems are intended to be assembled separately from the power sup-
ply. Currently the hypothesis of using a rectangular case of similar horizontal area as the electromagnet,
but with additional height is under evaluation. The electromagnet is projected to be in the middle height
of the case where the cooling system is placed above the electromagnet and the heating system and
remaining systems under the electromagnet.
Openings in the case are required for air inlet and outlet. The inlet has the possibility to be in the
top surface of the case or in upper lateral sides. For the outlet, openings in the bottom lateral sides
are feasible as long as connecting wires aren’t in contact with the existing hot air. The horizontal area
must be enough to correctly accommodate the heating system or extra space is necessary. An extra
opening is necessary for sample insertion. The height of the case depends on the occupied volume by
the heating system and cooling system. This relative positioning allows for the air to flow through the
electromagnet, cooling it and the air heater ensuring thermal stability of all the components.
The power supply and pressurized air connections are to be made in the back of the spectrometer
and accommodated in the bottom of the spectrometer.
68
Chapter 5
Conclusions
The smallest FFC NMR electromagnet up to date was achieved, with high homogeneity in the sample
site and is designed to operate within the magnetic field range of 0 and 0.33 T . As a starting point the