25
Fast volumetric rendering of NURBS-based surfaces Andreas Maier Chair of Pattern Recognition (Computer Science 5) Friedrich-Alexander-University Erlangen-Nuremberg Sunday 27 March 2022
| Date post: | 26-Dec-2015 |
| Category: |
Documents |
| Upload: | brendan-grant |
| View: | 220 times |
| Download: | 1 times |
Fast volumetric rendering of NURBS-based surfaces
Andreas MaierChair of Pattern Recognition (Computer Science 5)
Friedrich-Alexander-University Erlangen-Nuremberg
Wednesday 19 April 2023

Motivation
X-ray acquisitions require the use of ionizing radiation
Exposure of X-rays to any human subjects should be minimized
Design and implementation of novel trajectories require a “testing environment”
The “test environment” should be as realistic as possible

Outline
Simulation of X-ray images using X-Cat Open CL acceleration based on
Hardware tessellation Append buffer-based triangle drawing Pixel-based absorption modeling
Results Summary and Outlook

Simulation of X-ray images with X-cat
X-Cat is a 3D model of the human body based on the visual human
Supports the simulation of motion: Breathing Heart beat
Based on 3D/3D Spline surfaces: Each surface is 2D that changesover time: (u, v, t)
Each tuple (u, v, t) correspondsto a 3D point (x, y, z)

Simulation of X-ray images with X-cat (2)
Simulation of an x-ray image:
Render 3D volume at time t Write volume to disk (~500 MB) Load volume for projection Project to 2D Save image to disk
133 to 495 projections requiredper simulated scan
X-Cat internally employs ray castingand iterative computation of rayspline intersections

Outline
Simulation of X-ray images using X-Cat Open CL acceleration based on
Hardware tessellation Append buffer-based triangle drawing Pixel-based absorption modeling
Results Summary and Outlook
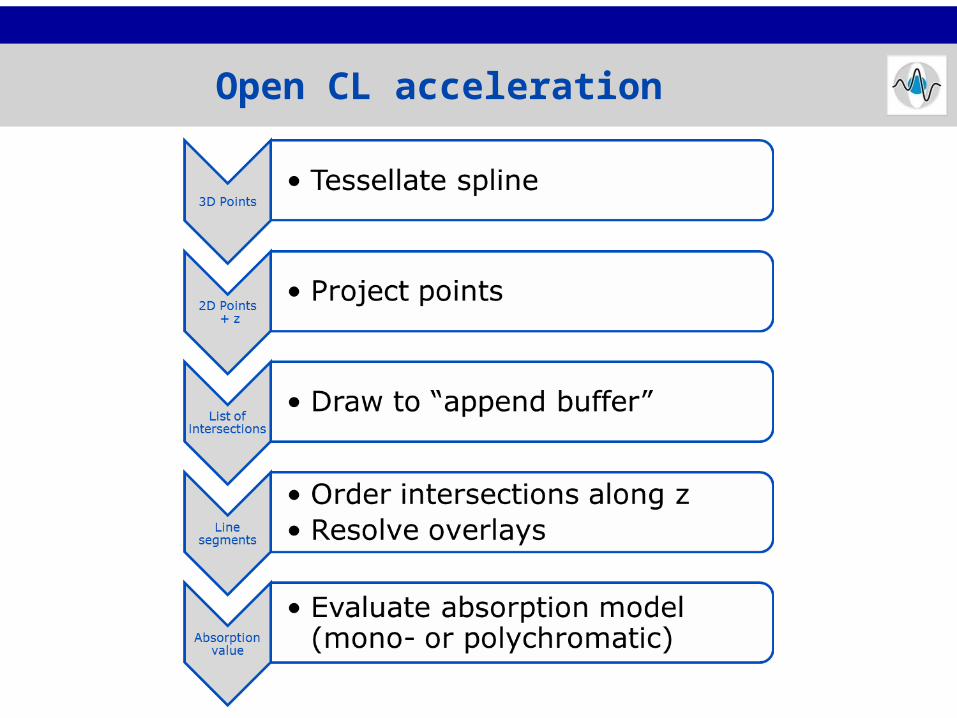
Open CL acceleration
Hardware Tessellation
Ray / Spline intersection are computationally inefficient
Sampling of points and triangles is fast(Tessellation)
Tessellation in hardware is even faster
Hardware tessellation causes a slight loss in accuracy (here: ~ 28 micron)
=> Results in a 2D grid of 3D Points

Append buffer-based drawing
Projection of 3D points yields 2D points plus their z coordinate
Use 2D neighborhood relation of the set of points to generate and draw triangles (use any triangle rasterizing algorithm)
Draw points into an “append buffer” like structure
Idea: Save all drawn values

z buffer-based drawing
Screen buffer z buffer
x
y
If (z < z buffer(x, y)){screen buffer(x, y) = color;z buffer(x, y) = z;
}
x
y

2
Append buffer-based drawing (2)
append buffer
pixel buffer
append buffer pointer21
0 0

3
Append buffer-based drawing (2)
append buffer
pixel buffer
append buffer pointer2
1
0
0

43
Append buffer-based drawing (2)
append buffer
pixel buffer
append buffer pointer
21
0 0

54
3
Append buffer-based drawing (2)
append buffer
pixel buffer
append buffer pointer
2
1
0 0

65
4 3
Append buffer-based drawing (2)
append buffer
pixel buffer
append buffer pointer
2 10 0

6
54
3
Append buffer-based drawing (2)
append buffer
pixel buffer
append buffer pointer
2 10 0

6
54
3
Append buffer-based drawing (2)
append buffer
pixel buffer
append buffer pointer
2 10 0
Append buffer-based drawing (3)
By saving more than one entry per pixel we can store:
ID of the painted object Depth value Pointer to the next element in the list
Access to append buffer and pixel counter need to be atomic
Especially access to the global append buffer pointer is expensive
Reading from the append buffer is highly not coalesced

Pixel-based absorption modeling
Read the list from the append buffer
Sort the intersections along z
Remove impossible cases (e.g. three intersections in a row of the same object)
Compute length of line segments along z
Evaluate absorption model

Outline
Simulation of X-ray images using X-Cat Open CL acceleration based on
Hardware tessellation Append buffer-based triangle drawing Pixel-based absorption modeling
Results Summary and Outlook

Results – Tesselation (106 points)
1D Time [ms] Accuracy [mm]
CPU (Java) 625 -
Open CL 29 4.24 E-7
Open CL Texture 23 0.0017
2D Time [ms] Accuracy [mm]
CPU (Java) 2582 -
Open CL 45 9.54 E-7
Open CL Texture 25 0.003
3D Time [ms] Accuracy [mm]
CPU (Java) 10742 -
Open CL 100 3.71 E-5
Open CL Texture 30 0.028

Results – Projection
X-Cat Heart(23 Splines)
30 x 30Time [ms]
50 x 50Time [ms]
100 x 100Time [ms]
Global append buffer
244 251 294
Local append buffer
- 116 159
Z-Buffer 53 49 51
Monochromatic absorption
73 85 101

Outline
Simulation of X-ray images using X-Cat Open CL acceleration based on
Hardware tessellation Append buffer-based triangle drawing Pixel-based absorption modeling
Results Summary and Outlook

Summary and Outlook
Simulation of X-ray images is required to save dose X-Cat can be accelerated using
Hardware tessellation Append buffer-based triangle drawing Pixel-based absorption modeling
Computation of one projection can be done in 200 ms Current state of the software still requires some
debugging Next: Sample motion fields and volumes

Thank you for your attention

















