Imagination-Augmented Agents for Deep Reinforcement Learning Sébastien Racanière Théophane Weber*, David Reichert* & Lars Buesing, Arthur Guez, Danilo Rezende, Adria Badia, Oriol Vinyals, Nicolas Heess, Yujia Li, Razvan Pascanu, Peter Battaglia, Demis Hassabis, David Silver, Daan Wierstra
Transcript
Imagination-Augmented Agents for Deep Reinforcement Learning
Sébastien RacanièreThéophane Weber*, David Reichert*
&Lars Buesing, Arthur Guez, Danilo Rezende, Adria Badia, Oriol Vinyals,
Nicolas Heess, Yujia Li, Razvan Pascanu, Peter Battaglia, Demis Hassabis, David Silver, Daan Wierstra
Imagination-Augmented Agents for Deep Reinforcement Learning — Sébastien Racanière
Plan
What I will not cover:
● RL training of the agent
What I will cover:
● Building of an environment model● Building of I2A● Training loss for rollout policy
Imagination-Augmented Agents for Deep Reinforcement Learning — Sébastien Racanière
TF + Sonnet
● Sonnet Library built on top of TF● Handles variable sharing transparently● Object-oriented
○ Explicitly represent submodules○ Configure then connect
import sonnet as snt
# Provide your own functions to generate data Tensors.train_data = get_training_data()test_data = get_test_data()
# Construct the module, providing any configuration necessary.linear_regression_module = snt.Linear(output_size=FLAGS.output_size)
# Connect the module to some inputs, any number of times.train_predictions = linear_regression_module(train_data)test_predictions = linear_regression_module(test_data)
Imagination-Augmented Agents for Deep Reinforcement Learning — Sébastien Racanière
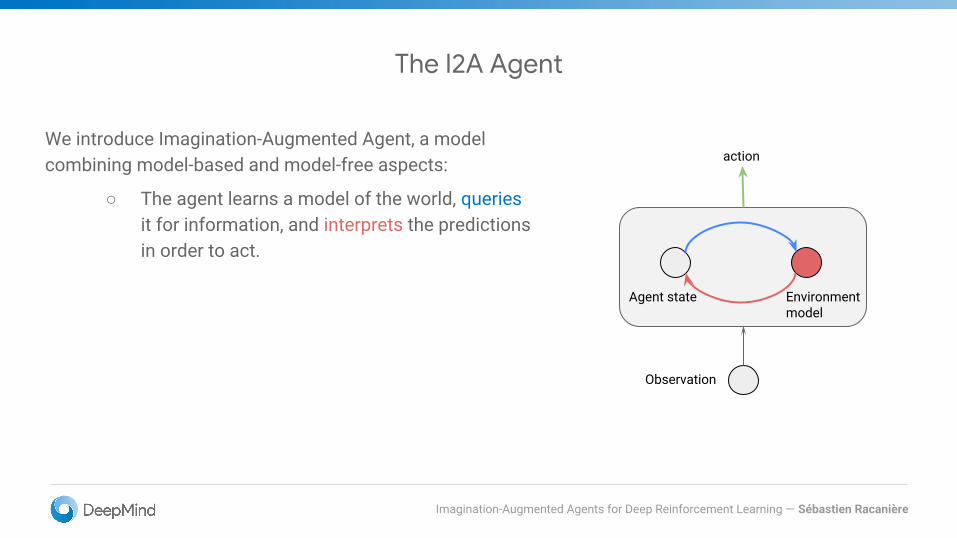
The I2A Agent
We introduce Imagination-Augmented Agent, a model combining model-based and model-free aspects:
○ The agent learns a model of the world, queries it for information, and interprets the predictions in order to act.
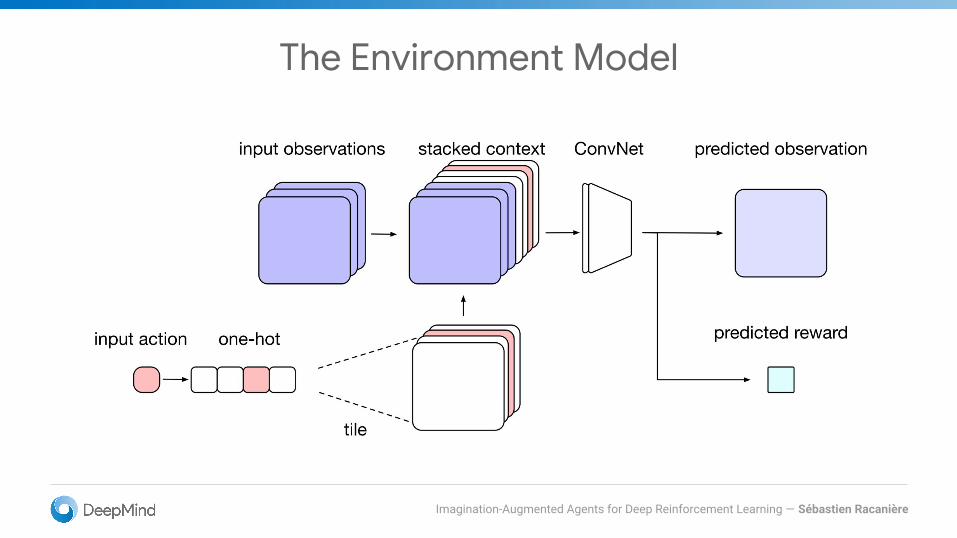
Environment model
Agent state
Observation
action
Imagination-Augmented Agents for Deep Reinforcement Learning — Sébastien Racanière
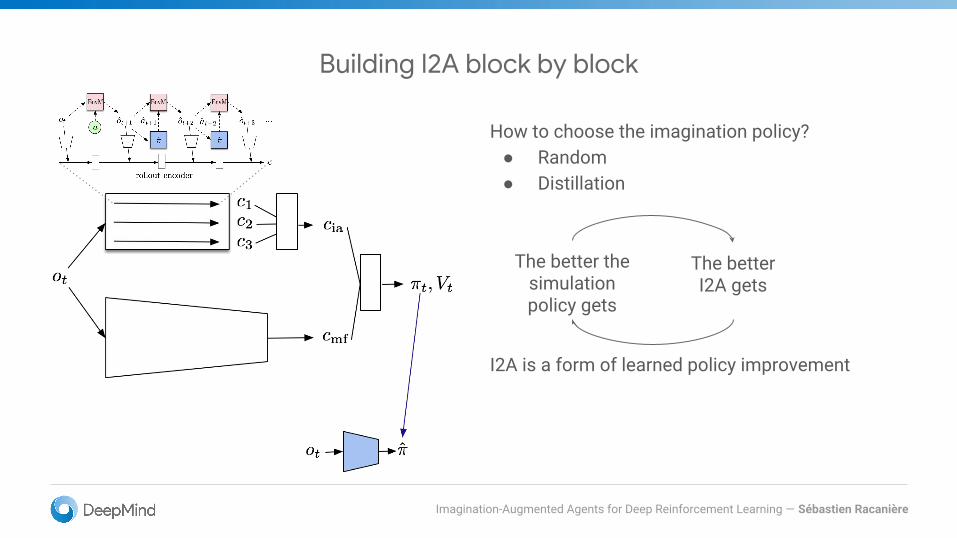
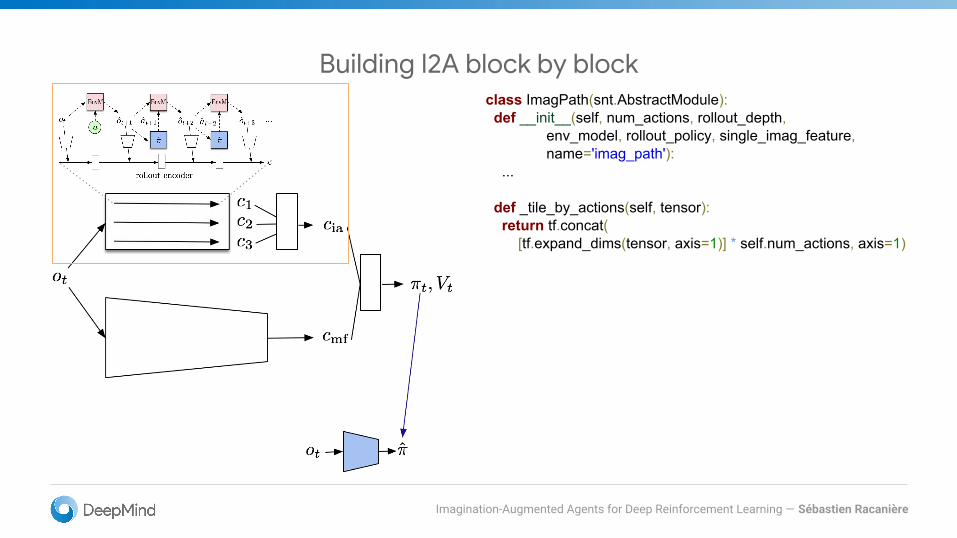
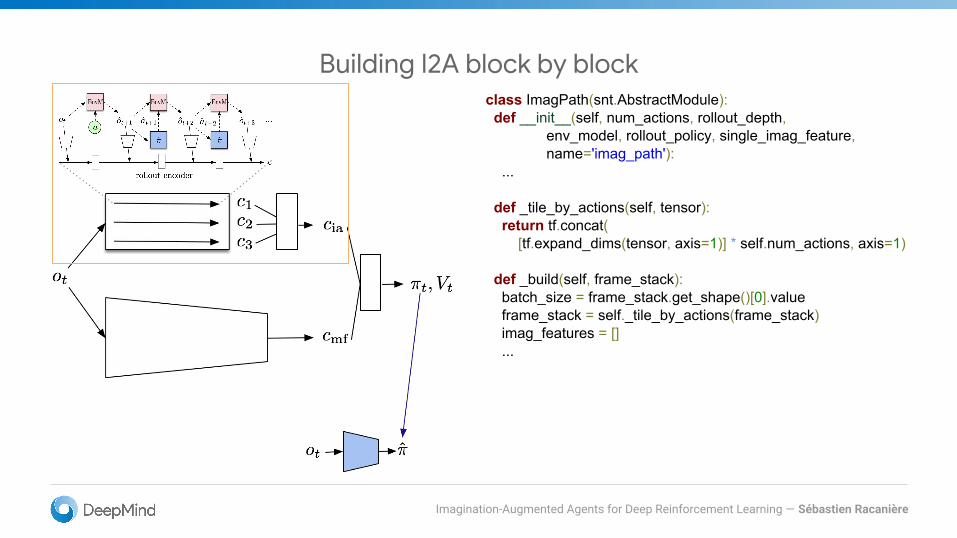
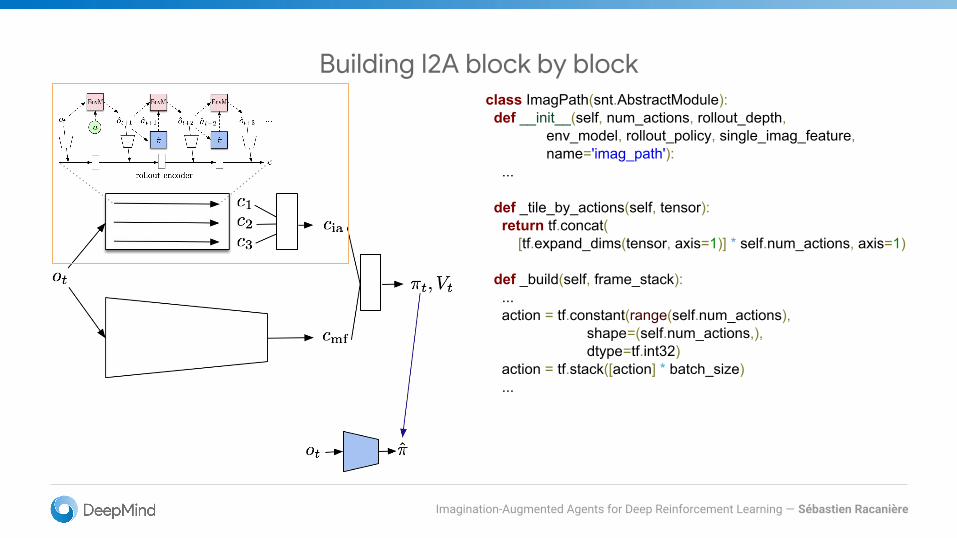
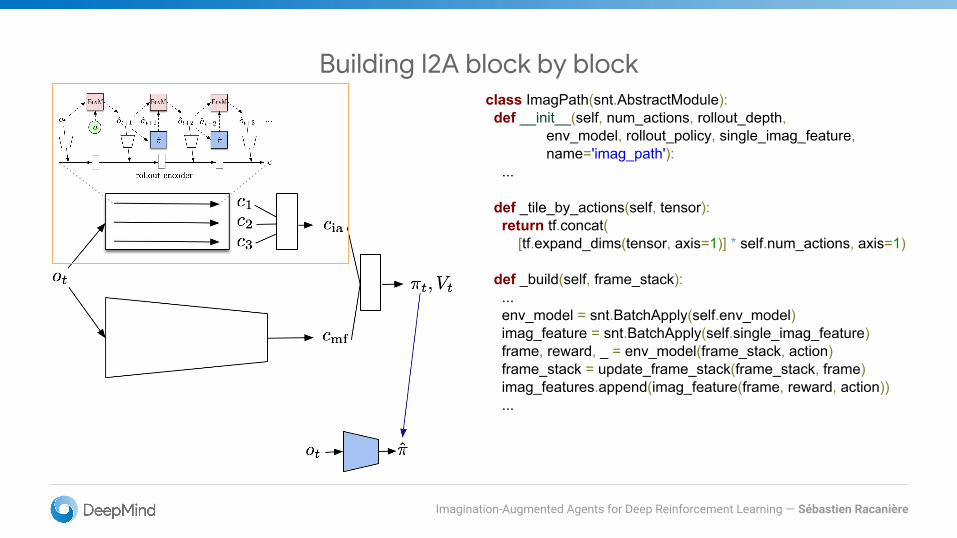
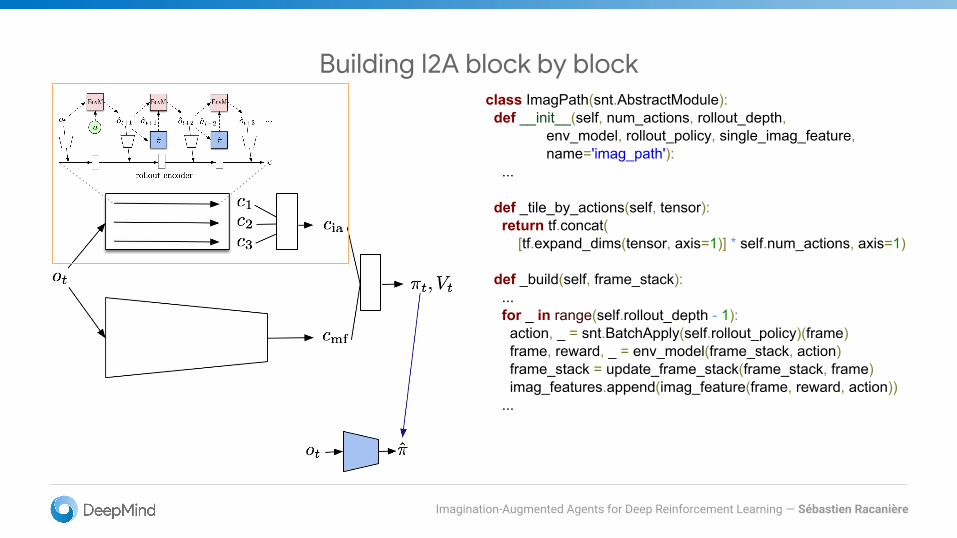
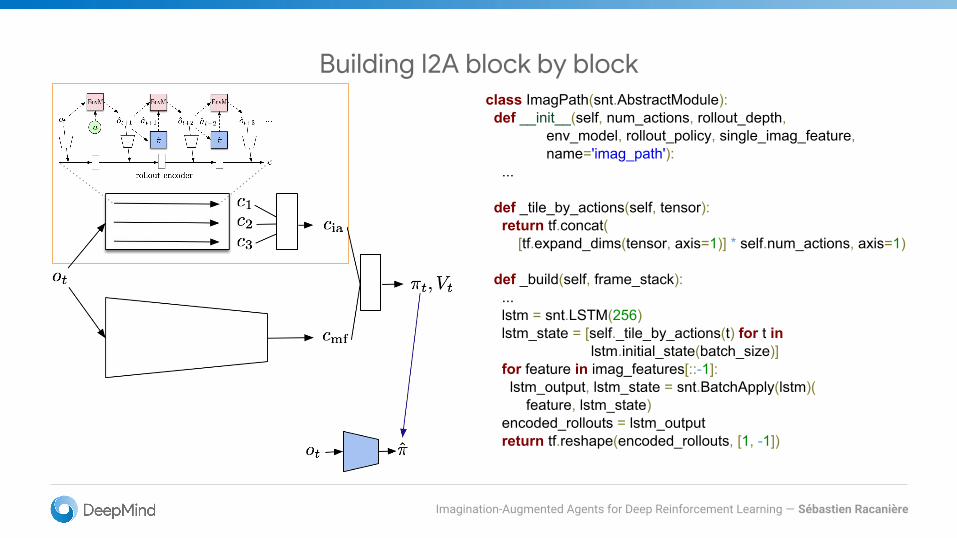
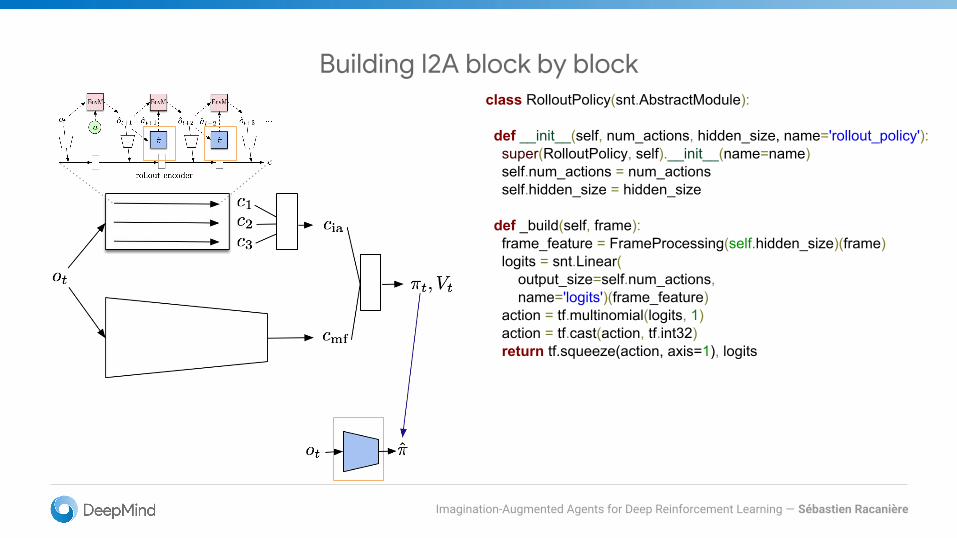
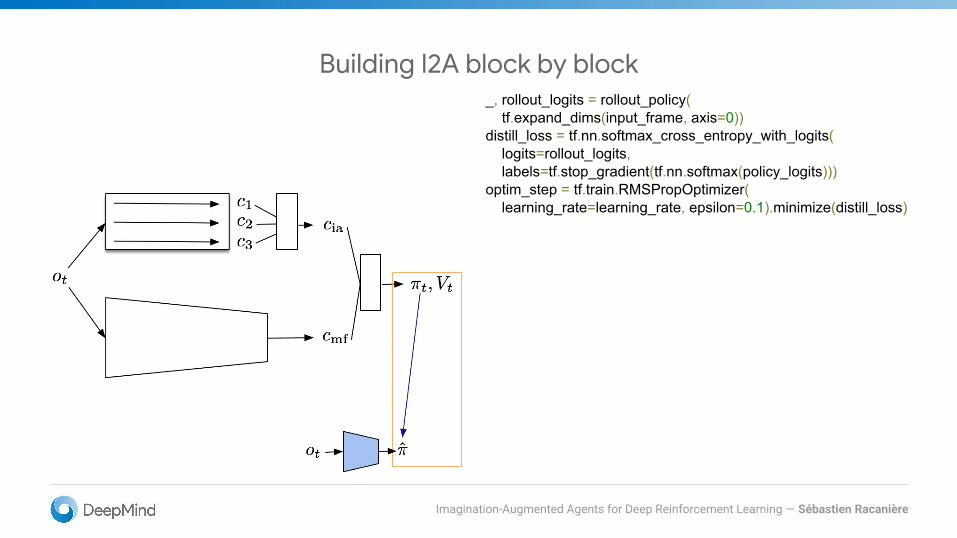
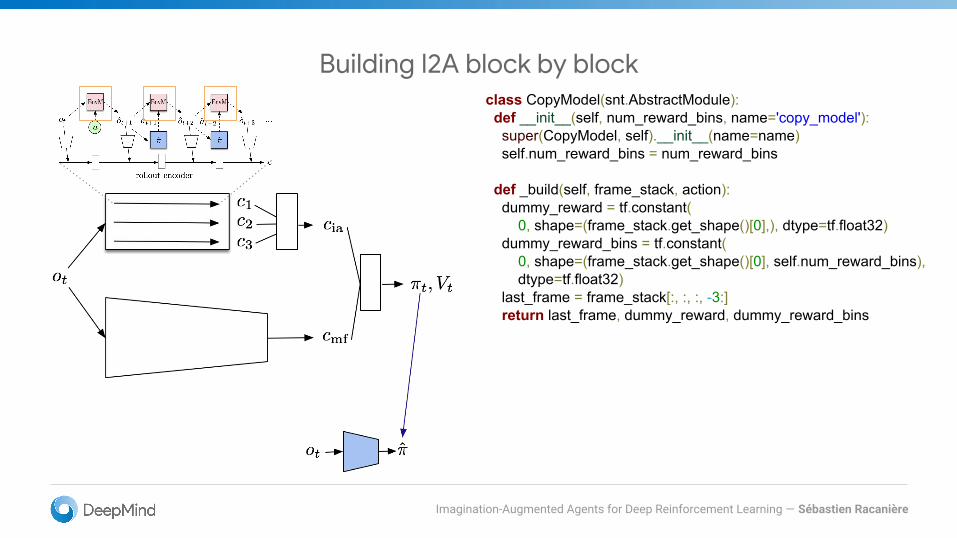
Building I2A block by block
How to choose the imagination policy?● Random● Distillation
I2A is a form of learned policy improvement
The better the simulation policy gets
The better I2A gets
Imagination-Augmented Agents for Deep Reinforcement Learning — Sébastien Racanière
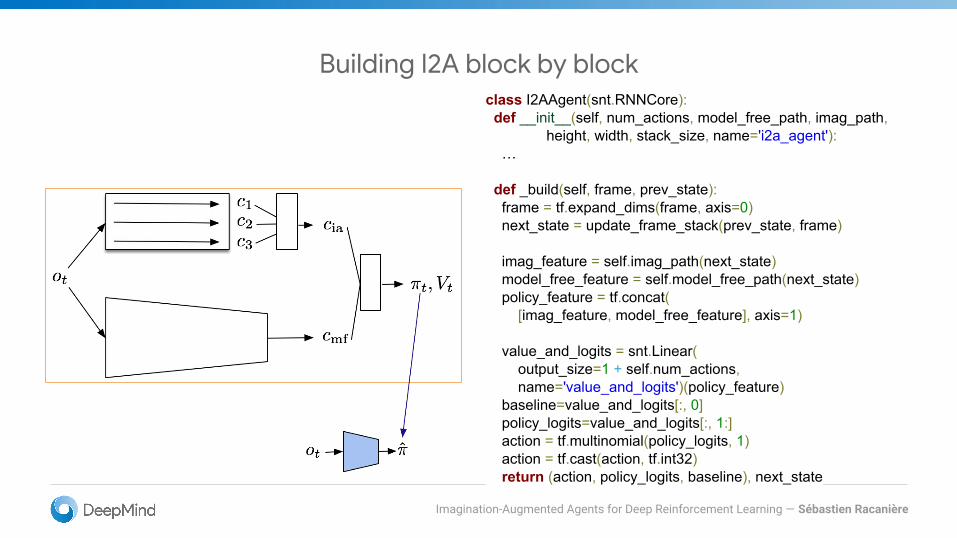
Building I2A block by blockclass I2AAgent(snt.RNNCore): def __init__(self, num_actions, model_free_path, imag_path, height, width, stack_size, name='i2a_agent'): …
Imagination-Augmented Agents for Deep Reinforcement Learning — Sébastien Racanière
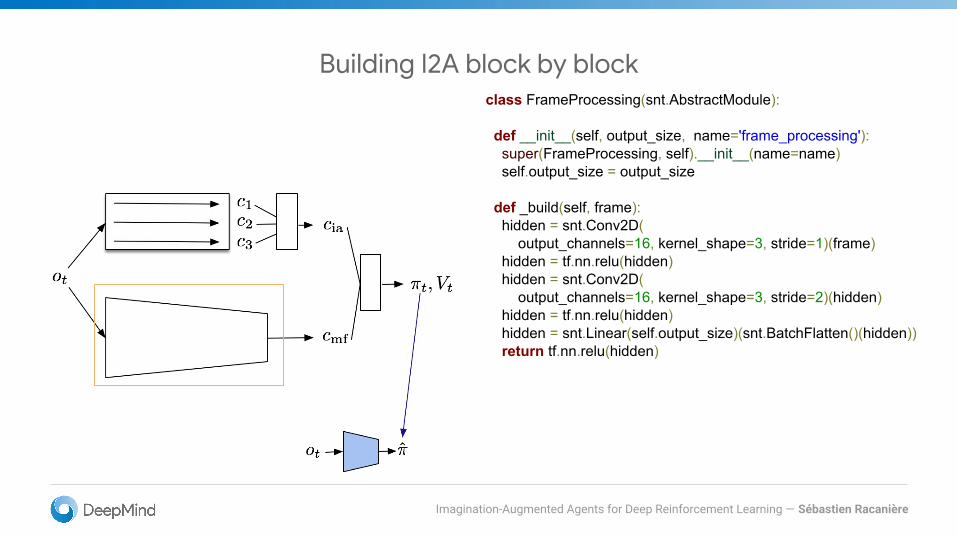
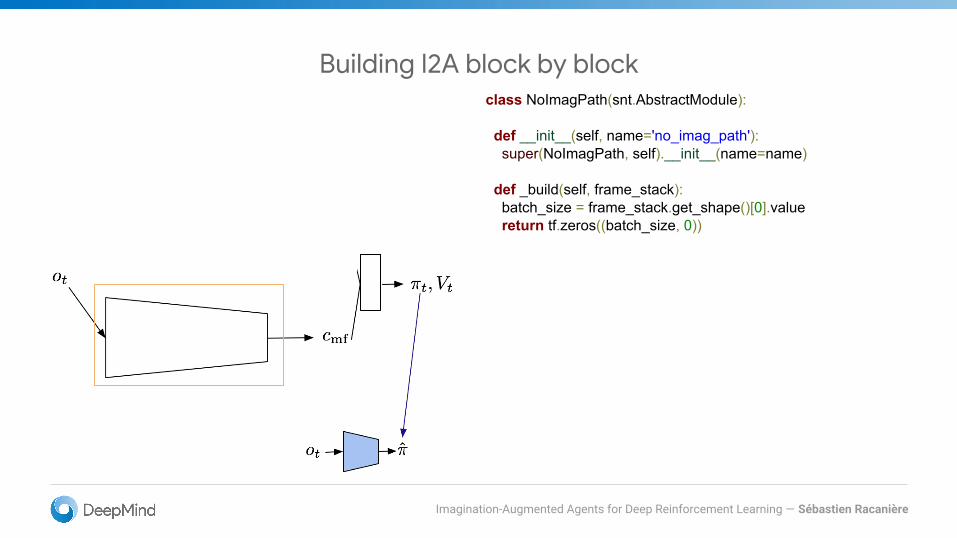
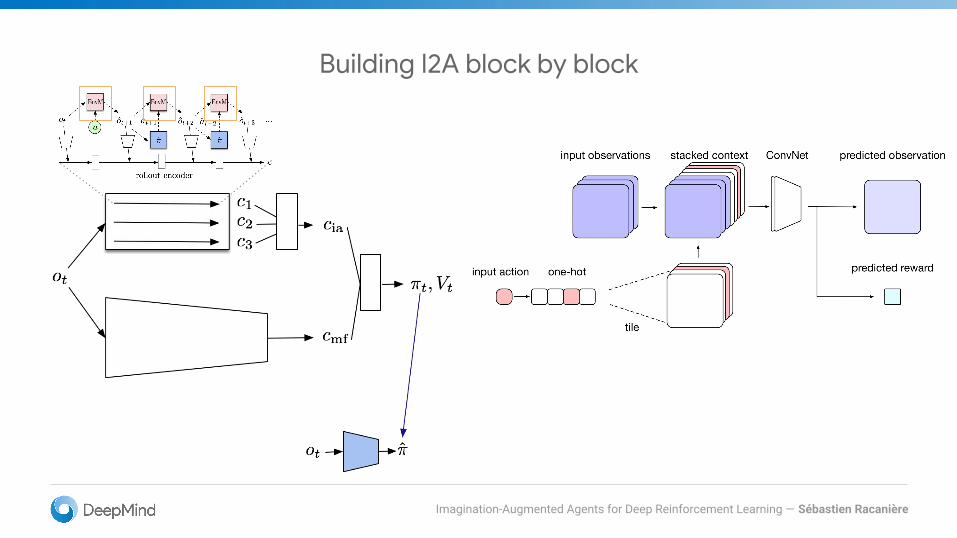
Building I2A block by block
Imagination-Augmented Agents for Deep Reinforcement Learning — Sébastien Racanière
The Environment Model
Imagination-Augmented Agents for Deep Reinforcement Learning — Sébastien Racanière
Conclusion
● Use TF + Sonnet○ modularity○ variable sharing
● Modular construction of I2A○ ImagPath / NoImagPath○ CopyModel / SizePreservingConvNetModel○ could also do RolloutPolicy / RandomPolicy○ Rapid turnaround of experiments