FOURIER ANALYSIS AND IMAGE PROCESSING Senior Math Seminar, Fall 2014 Matt Johnson Abstract Fourier Analysis is a powerful tool in image processing, and can be used to extract geometric and positional information from an image. By transforming an image from the spatial domain to the frequency domain, it is possible to manipulate the structure of said image in unexpected ways. This paper will touch on the derivation and simplification of this computationally heavy task, as well as present a few examples for the understanding of the subject matter.
Transcript
Senior Math Seminar, Fall 2014
Matt Johnson
AbstractFourier Analysis is a powerful tool in image processing, and can be used to extract
geometric and positional information from an image. By transforming an image from the spatial domain to the frequency domain, it is possible to manipulate the structure of said
image in unexpected ways. This paper will touch on the derivation and simplification of this computationally heavy task, as well as present a few examples for the understanding
of the subject matter.
I. Introduction to Image Processing
The world we live in is full of visual beauty. This beauty is manifested with a vast
amount of shapes, colors, textures, and motions. Even though our eyes can sense and perceive
most of the world’s beauty, we may want to see it at our leisure, or simply when we can’t be in
the right place at the right time. Whatever the case may be, we look at images that have been
acquired through the use of machines every single day. It becomes somewhat of a great
challenge to give the perception capabilities of the human eye to a machine in order to interpret
the visual information that is present in our sensory world. Image processing is defined as the
acquisition, analysis, and manipulation of a digitized image, especially in order to improve its
quality. In this paper, I will go over a few real world applications of image processing, some
basic image processing concepts and methods with a bigger focus on Fourier Analysis, how
Fourier Analysis came to be a part of our world today, some of the mathematical procedures and
variations, and finally some examples of Fourier Analysis being used.
I feel that most people’s minds don’t learn something properly if they are just told what
something is and how to perform it. The one key element that is indubitably necessary is being
taught the purpose of what they’re learning: how to use it in the real world. Because of this
notion, I will put forth an incomplete list of examples in which image processing is used in order
to give you – the reader – some motivation behind learning it. Among these examples are:
special effects in videos, facial recognition software, vision-guided robotics, vision-based
diagnosis such as X-rays, astronomical image enhancement, missile guidance, surveillance, and
traffic monitoring. I won’t go into full detail of any of these areas, but in each example, image
processing is taking place. This means that a picture is taken, being analyzed, and manipulated in
some way, shape, or form. So it is evident that image processing goes beyond putting a filter on
an Instagram photo; there are actually very useful applications of it. Next I will explain the basic
principles of image processing.
a. Image Acquisition
Image acquisition is the first step to the entirety of image processing. In the big picture, it
can be described as simply obtaining an image to be worked with. This step requires the use of
some sort of sensor in optical or thermal wavelengths. The result of image acquisition is the
mapping of the three-dimensional visual world onto a two-dimensional plane surface. This can
also be called rendering: a three-dimensional scene is rendered into a two-dimensional image.
Now, it just so happens that, more often than not, the image that has been acquired is not of the
ideal quality. By this, it is meant that the picture is not immediately in the right condition to be
viewed by the person (or thing) that is meant to view it. Some examples include noise and blur.
Some causes of these effects in images include motion between the object and the camera and
atmospheric conditions.
b. Image Analysis
After we have acquired an image, we can move on to the next step: image analysis.
Image analysis can be defined as the extraction of meaningful information from images. When
enhancing an image this step can be thought of as extracting information that is unneeded, and
then removing it from the image altogether. This can be done to find out what needs to be
changed in a picture before it’s ready to be viewed. A further look at this part in the process
reveals a sub process called segmentation. In this portion, the entire original image is subdivided
into separate homogeneous regions. For example, an image consisting of a shore might have a
region with water and a region with land. These two regions may then be further subdivided, and
so on. Other things to extract from each region, after segmentation, are features such as texture,
shape, and color. The idea is to classify each region into a sort of hierarchy of meaningful
classifications. I could go on all day about this process, but the focus here is to get the basic
principles across.
c. Image Manipulation
The last step, after acquisition and analysis, is manipulation. So now we have an image
and we know what should be changed about it. Naturally, the next thing to do is to commit those
changes. Keep in mind that this doesn’t always involve a human consciously making these
changes with software such as Adobe Photoshop, even though Photoshop comes equipped with
mostly all manipulation features. Much of the time, the process consists of taking each individual
pixel (picture element) and putting it through a function, such is the case with Fourier Analysis.
We will dive deeper into that territory later, however.
II. History
Now that I have introduced the basic ideas and principles of image processing as well as
some motivation behind learning it, we can start getting into Fourier Series and the Fourier
Transform, and how they apply to image processing.
The Fourier Series is named after Jean-Baptiste Joseph Fourier. His purpose for
proposing this idea was to solve the heat equation in a metal plate. At the time, there was no
solution to the heat equation in a general sense; only in simple cases. These simple cases only
occurred if the heat source behaved like a sinusoidal wave. Given this problem, Fourier made it
his goal to model any heat source as a weighted sum of sine and cosine waves. This sum came to
be known as the Fourier Series. Although the original motive for coming up with this series was
to solve the heat equation, it became apparent that representing any function as a sum of sine and
cosine waves was very useful and could be applied to other areas of mathematical and physical
problems. Some of these areas include quantum mechanics, econometrics, acoustics, optics,
signal processing, electrical engineering, vibration analysis, and (our topic of discussion) image
processing.
Based on the Fourier Series representation of a function, we can lengthen the represented
function’s period to allow it to approach infinity. This means that the function being represented
doesn’t even need to be periodic over some interval since the interval is the function’s entire
domain. From this method, the Fourier Transform was born. What’s neat about the Fourier
Transform is that an Inverse Fourier Transform exists. To that extent, the purpose of the Fourier
Transform in most applications is to transform a difficult problem into a problem in another
domain, solve the relatively easy problem, and then invert the Fourier Transform to come to the
solution in the original domain. This is usually the preferred route to take opposed to the
difficult, sometimes impossible, original problem.
So how does this relate to image processing? According to Fourier Theory, any signal
can be expressed as a sum of a series of sinusoids. In a two-dimensional image, these would just
be variations in brightness across the image. The original image would be the input to the
transform function. The transformed image simultaneously encodes information of each input
pixel. This information includes spatial frequency, magnitude, and phase. Based on this
information, it is possible to make modifications to the transformed image, that is, we can filter
out some undesired frequencies. After modifications have been made, we can use the Inverse
Fourier Transform to bring back the image in the spatial domain – the domain that typically
makes sense to the human eye.
III. Fourier Series Representations
a. Traditional
Now let’s start using some math. As stated earlier, Fourier came up with a way to
approximate a continuous function using weighted sums of sines and cosines. I won’t go over
many of the details, but here is what he came up with:
f ( x )=a0
2+∑n=1
∞
an ∙cos (nω0 x )+bn ∙ sin (nω0 x);n=1,2,3 ,…
Where
a0=2T0∫T 0
❑
f ( x )dx
an=2T 0
∫T 0
❑
f ( x )cos (nω0 x )dx
bn=2T 0
∫T0
❑
f ( x )sin (nω0 x)dx
If f (x) is periodic, let T 0 be the smallest T satisfying the equation f ( x+T )=f (x ) (called the
fundamental period), let f 0=1T0
(called the fundamental frequency), and let ω0=2πT0
=2 π f 0
(called the fundamental angular frequency).
Note: ∫T 0
❑
❑ denotes integrating over any continuous interval of lengthT 0.
This can all be a little confusing, so let’s go ahead and do a very simple example.
b. Example
Letf ( x )=x ;−π ≤ x≤ π.
We have T 0=2π and ω0=1. Since f ( x ) is an odd function, integrating it over a symmetric
interval will give us an=0 , n≥0.
bn=1π∫−π
π
x sin (nx )dx
After integrating by parts, we get bn=−2n
cos (πn )=2n
(−1 )n+1
Hence f ( x )=x ≈2∑n=1
∞ (−1 )n+1
nsin (nx )
≈2(sin ( x )− sin (2 x )2
+sin (3x )
3…)
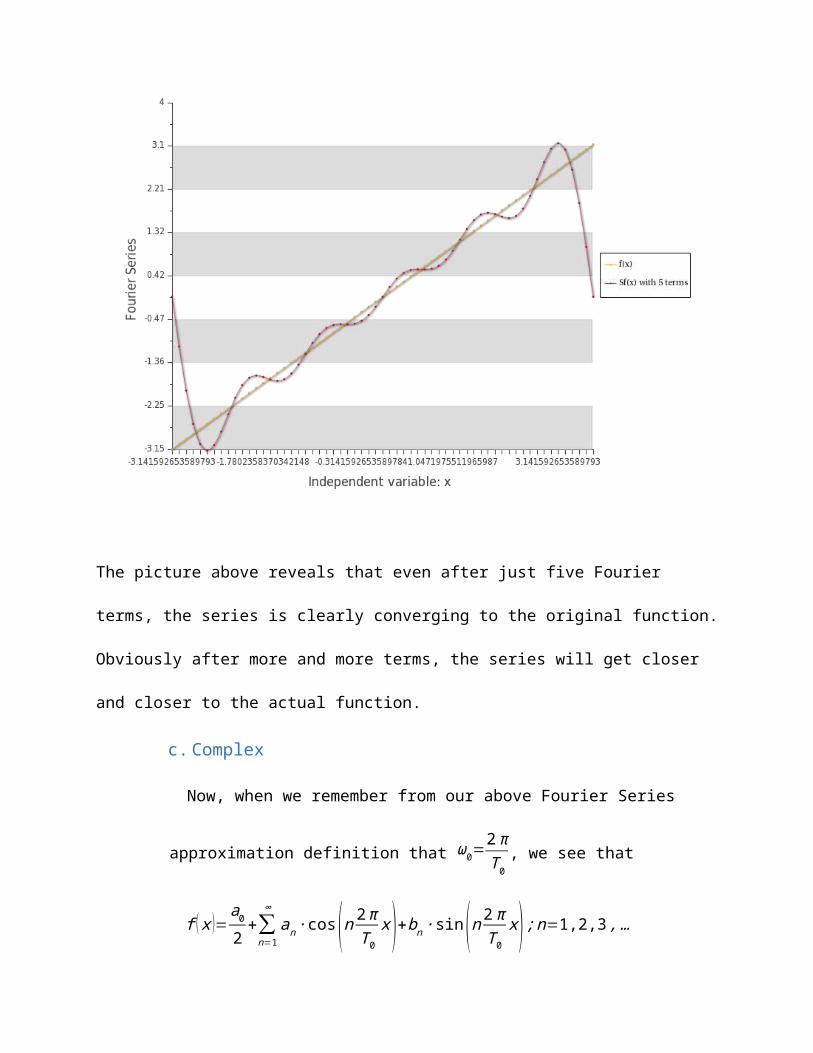
The picture above reveals that even after just five Fourier terms, the series is clearly converging
to the original function. Obviously after more and more terms, the series will get closer and
closer to the actual function.
c. Complex
Now, when we remember from our above Fourier Series approximation definition that
ω0=2πT0
, we see that f ( x )=a0
2+∑n=1
∞
an ∙cos (n 2πT0
x )+bn ∙ sin(n 2πT0
x );n=1,2,3 ,…
This means that these sine and cosine terms are always T 0 periodic (since they
themselves are 2π periodic, dividing T 0 into a multiple of 2π will yield a wave that is T 0
periodic). Due to the approximation being periodic, it must be true that we can only approximate
a periodic function. So is it possible to represent a non-periodic function using a Fourier series?
The answer is yes, but we must look into the realm of complex numbers. Using Euler’s formulas,
cos (θ )= eiθ+e−iθ
2, sin (θ )= e iθ−e−iθ
2i,
We can rewrite the Fourier series approximation formula as
f ( x )=a0
2+∑n=1
∞
an ∙cos (n 2πT0
x )+bn ∙ sin(n 2πT0
x )
¿a0
2+∑n=1
∞
an∙e
2 inπxT0 +e
−2inπxT0
2+bn ∙
e2 inπxT0 −e
−2 inπxT0
2i
¿a0
2+∑n=1
∞ an−i bn2
∙ e2 inπxT 0 +∑
n=1
∞ an+ ibn
2∙ e
−2 inπxT 0
¿∑−∞
∞
cn e2inπxT 0 =∑
−∞
∞
cn e¿ω0 x
Where
c0=a0
2, cn=
an− ibn
2, c−n=
an+i bn2
Using our formulas for an and bn from earlier,
cn=12¿
¿ 1T0∫T 0
❑
f ( x ) (cos (nω0 x )−isin (nω0 x )) dx
¿ 1T0∫T 0
❑
f ( x )( e¿ω0 x+e−¿ω0 x
2− ie¿ω0 x−ie−¿ω0 x
2 i )dx
¿ 1T0∫T 0
❑
f ( x )( 2e−¿ω0 x
2 )dx
cn=1T 0
∫T0
❑
f ( x ) e−¿ω0x dx; n=0 , ±1 ,±2 ,…
These coefficients are called complex Fourier coefficients. Note that the formula reduces to the
same value when using a negative n. Also note that this definition still requires that the function
be periodic since we’re still using the fundamental period T 0 .
IV. Derivation of the Continuous Fourier Transform
This is where we extend the period of the function to be infinite. At this point it will be beneficial
to redefine the variable representing our period:
T 0=2 L,where we use the interval [−L, L]
Thus we have
f ( x )=∑−∞
∞
cn einπxL
cn=1
2 L∫−L
L
f (x ) e−inπxL dx
So let us find out what happens when we allow L→∞ . We first let ω=nπL
and
Δω=ωn+1−ωn=πL. So,
f ( x )=∑−∞
∞
cn eiωx
cn=Δω2 π
∫−L
L
f ( x ) e−iωx dx
And cω=2Lcn=cn2πΔω
So now,
f ( x )=∑−∞
∞ cω2 π
Δωeiωx and cω=∫−L
L
f ( x )e−iωx dx
Now, since ω=nπL→0as L→∞, cωseems like a function of ω, which is a frequency. Let’s name
this function F (ω ) . Here we have
f ( x )= limL→∞ (Δω→0 )
∑−∞
∞ cω2 π
Δωe iωx= 12π
∫−∞
∞
F (ω) eiωx dω
F (ω )=∫−∞
∞
f ( x ) e−iωx dx
This function F (ω ) is called the Fourier Transform of f ( x ) . The definition of f (x) above it is the
Inverse Fourier Transform. More formally:
F [ f (x ) ]=F (ω )=∫−∞
∞
f ( x )e−iωx dx
F−1 [F (ω) ]=f ( x )= 12π
∫−∞
∞
F (ω ) eiωx dω
Together F (ω) and f (x) form a Fourier pair. The definition above is called the Continuous
Fourier Transform. It is typically used to transform a function in the time domain to be able to
work with it in the frequency domain. This means that the input function must be a continuous
time signal. Since our focus for this topic is that of image processing on digital images, we will
be working with discrete signals, i.e. a finite list of equally spaced samples of a function. This is
intuitive to use with digital images because they always have a finite number of pixels arranged
in rows and columns. Another reason for this is that computers represent discrete rather than
continuous signals of finite duration.
V. Discrete Fourier Transform
In order to sample a continuous signal, we convert f ( x ) , x∈R to f (x j ) , j∈Z . The first three
terms of the sampled signal would be f (x0 ) , f (x0+Δ x) , f (x0+2 Δ x ) . Given Nsamples, j ranges
from 0 toN−1.
As you can see, the graph on the left represents the continuous form of the signal, while the
graph on the right is the same function, only including a finite number of evenly spaced sampling
points. Since we’re starting at the 0 th sampling point and only going to N−1, we have a sort-of
finite period. That is, if we use
~f ( j )={f (x j) ,0≤ j ≤N−1
0 ,elsewhere
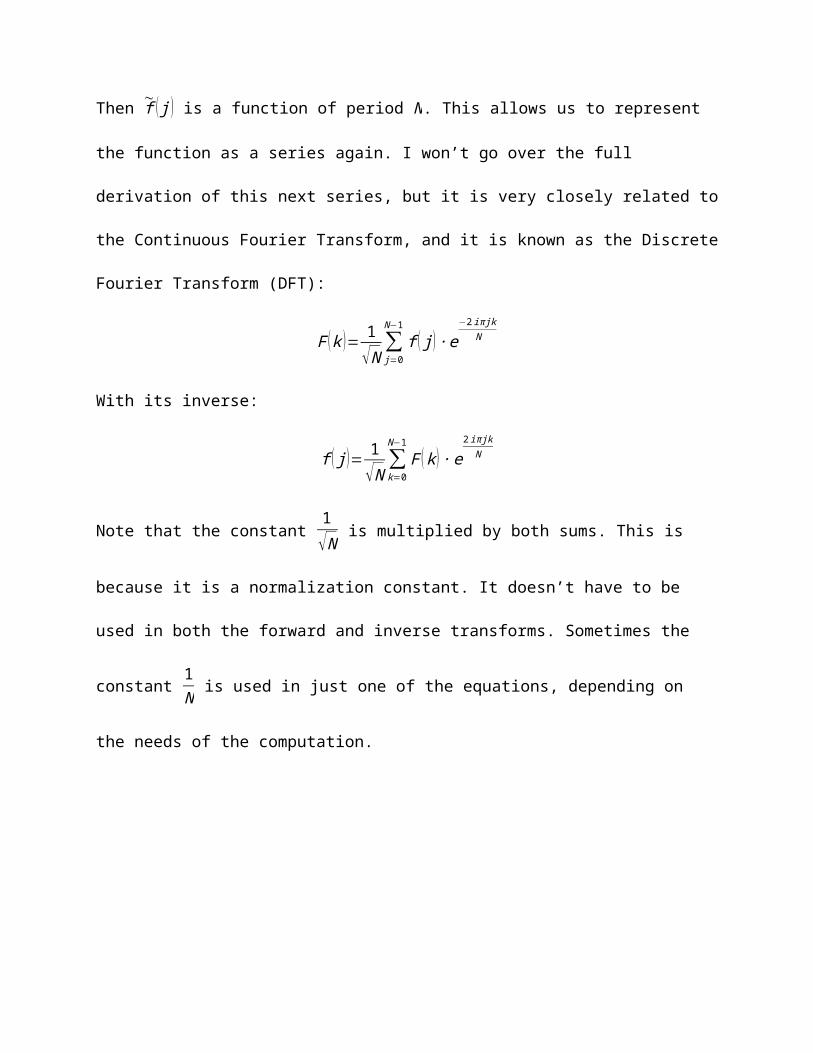
Then ~f ( j ) is a function of period N . This allows us to represent the function as a series again. I
won’t go over the full derivation of this next series, but it is very closely related to the
Continuous Fourier Transform, and it is known as the Discrete Fourier Transform (DFT):
F ( k )= 1√N ∑
j=0
N−1
f ( j ) ∙ e−2iπjk
N
With its inverse:
f ( j )= 1√N ∑
k=0
N−1
F (k ) ∙ e2 iπjkN
Note that the constant 1
√N is multiplied by both sums. This is because it is a normalization
constant. It doesn’t have to be used in both the forward and inverse transforms. Sometimes the
constant 1N
is used in just one of the equations, depending on the needs of the computation.
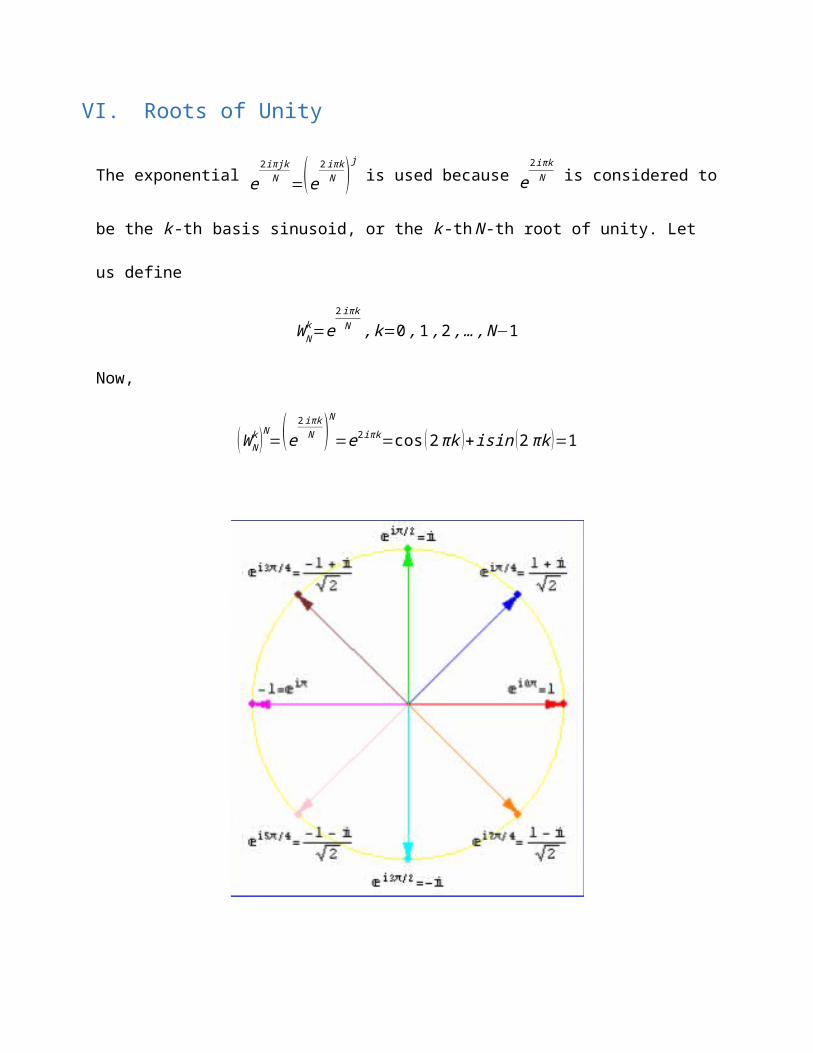
VI. Roots of Unity
The exponential e2 iπjkN =(e 2 iπk
N )j is used because e2 iπkN is considered to be the k -th basis sinusoid, or
the k -th N -th root of unity. Let us define
W Nk =e
2 iπkN , k=0 ,1,2 ,…,N−1
Now,
(W Nk )N=(e2 iπk
N )N=e2 iπk=cos (2 πk )+isin (2πk )=1
Above we can see these numbers plotted on the complex plane for N=8. Graphically, we can see
that the unit circle is divided into N equal parts using N points. When we look at
F ( k )= 1√N ∑
j=0
N−1
f ( j ) ∙ e−2iπjk
N = 1√N ∑
j=0
N−1
f ( j ) ∙ (e−2 iπkN ) j
We can think of it as the value of each point F (k ) is found by multiplying f ( j) with the
corresponding base sinusoid and summing the result. By raising the base sinusoid to the j -th
power and then multiplying it by f ( j ) , in a sense, we’re actually measuring how much of the
base sinusoid is present in f ( j) and at what phase, since the exponential is a complex number.
a. Example
To get a better understanding of this process, let’s do an example. Suppose we define
f ( x )=[23 44 ]. Let’s use our DFT formula:
F (0 )=∑j=0
3
f ( j ) e−iπ ∙0 j
2 =∑j=0
3
f ( j )=f (0 )+ f (1 )+ f (2 )+ f (3 )=2+3+4+4=13
F (1 )=∑j=0
3
f ( j ) e−iπ ∙ j
2 =2e0+3e−iπ
2 +4 e−iπ+4 e−i3π
2 =−2+i
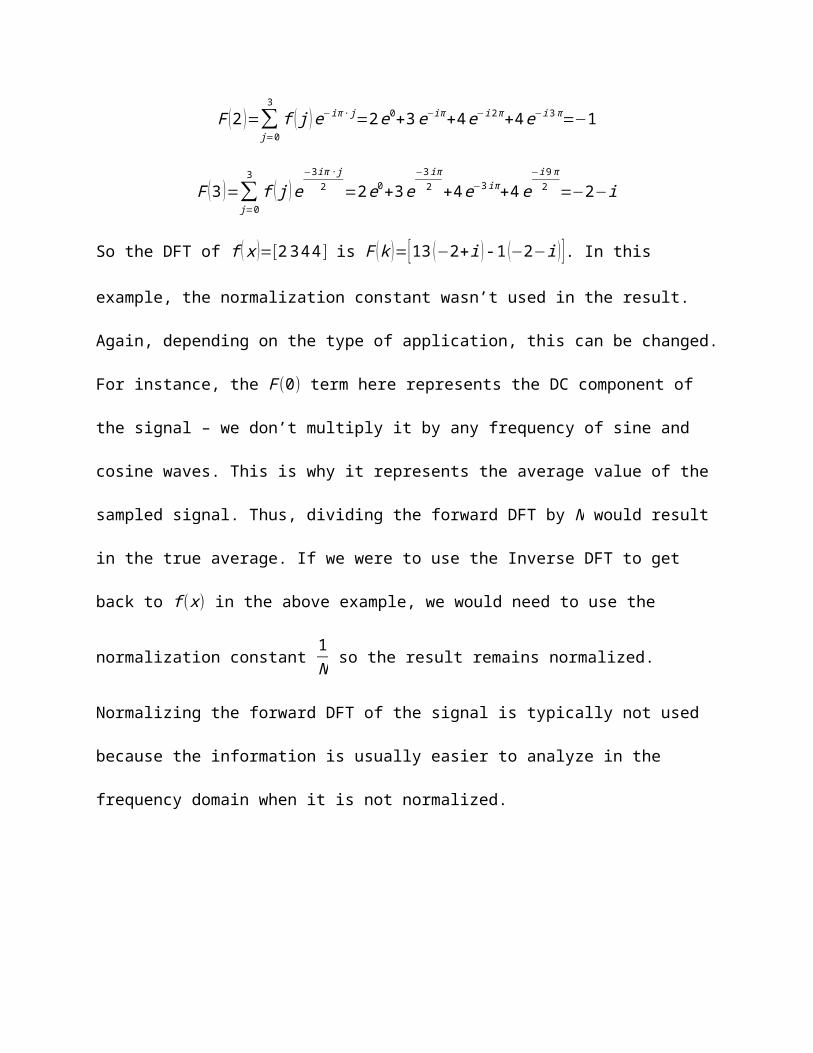
F (2 )=∑j=0
3
f ( j )e−iπ ∙ j=2e0+3e−iπ+4 e−i2π+4e−i3π=−1
F (3 )=∑j=0
3
f ( j )e−3 iπ ∙ j
2 =2e0+3e−3 iπ
2 +4 e−3 iπ+4e−i9π
2 =−2−i
So the DFT of f ( x )=[23 44 ] is F ( k )=[13 (−2+i ) -1 (−2−i ) ]. In this example, the normalization
constant wasn’t used in the result. Again, depending on the type of application, this can be
changed. For instance, the F (0) term here represents the DC component of the signal – we don’t
multiply it by any frequency of sine and cosine waves. This is why it represents the average
value of the sampled signal. Thus, dividing the forward DFT by N would result in the true
average. If we were to use the Inverse DFT to get back to f (x) in the above example, we would
need to use the normalization constant 1N
so the result remains normalized. Normalizing the
forward DFT of the signal is typically not used because the information is usually easier to
analyze in the frequency domain when it is not normalized.
VII. Complex Numbers
The information encoded in each term of the transform includes magnitude and phase. Since
these terms are complex numbers, they are of the form a+ ib where a is considered the real part
and b is considered the imaginary part. On a complex number plane, the point would be a units
on the real axis and b units on the imaginary axis. Just like how we can convert rectangular
coordinates on the real number plane to polar coordinates, we can also convert a point on the
complex plane to polar coordinates. We just need the distance from the origin (magnitude) and
angle measured from the real axis (phase). Using the Pythagorean Theorem and trigonometry,
we can find these:
A=√a2+b2 andθ=tan−1( ba )Where A is the magnitude and θ is the phase of the term. As such we can represent a Fourier
term as F ( k )=A kei θk. To check this let’s take the example of F (3 ) from above. We find the
magnitude to be A3=√(−2 )2+(−1 )2=√5, and the phase to be θk=tan−1(−1−2 )≈3.60524 . This
means F (3 )=√5∙ e3.60524 i . Using Euler’s formula,
F (3 )=√5 ( cos (3.60524 )+i sin (3.60524 ))=−2−i . This polar form of representing a Fourier term
is usually preferred over the other way since it is easier to extract both the magnitude and phase.
More on these values later. As a side note, if we had used the normalization constant earlier, the
magnitude would have changed, but the phase would have stayed the same. A smaller magnitude
is generally more difficult to analyze.
VIII. Two-Dimensional DFT
So far we’ve only gone over the necessary transforms to transform a one-dimensional
signal. These types of transforms are useful when using audio processing. Since, in image
processing, we analyze two-dimensional digital images, we’ll need a two-dimensional transform.
After digitization of an image, it is separated into rows and columns of pixels. This means we
need to iterate over each and every pixel in the picture to achieve our results. Here is the two-
dimensional Discrete Fourier Transform:
F (u , v )= 1
√MN ∑j=0
N−1
∑k=0
M−1
f ( j , k ) ∙ e−2πi( ujN+ vk
M )
With its inverse:
f ( j ,k )= 1
√MN ∑u=0
N−1
∑v=0
M−1
F (u , v ) ∙ e2πi( ujN + vk
M )
Where f (x , y ) is the image in the spatial domain, and the exponential term is the basis function
corresponding to each point F (u , v ) in the frequency domain (Fourier domain). One important
thing to note here is that f (x , y ) is actually defined by the brightness of the pixel in the spatial
domain image. This could technically include different values as well (including color or depth),
but for our purposes, we’ll just assume that we’re looking at grayscale images, also called
brightness images. Typically upon image acquisition, the image is in analog form in a two-
dimensional continuous space. During image sampling (digitization), the image is converted into
digital form in a two-dimensional discrete space. After digitization occurs, each pixel is
measured for brightness. The value that is assigned to it is the average brightness of the pixel
rounded to the nearest integer. This can be seen as the amplitude of a wave at that location. There
will be a set L of gray levels that may be assigned. This number is generally a power of two. If
our set L contains 64different gray levels, a completely black pixel would be assigned a value of
0 and a completely white pixel would be assigned63. Technically speaking, a black pixel would
have a negative amplitude, but we want to represent the pixels using positive numbers. The
process of representing the amplitude of the two-dimensional signal at a given coordinate value
as an integer value with L possible gray levels is called quantization. I could write a whole
different paper on that subject alone so I’ll just leave it at that. The main point here is the fact
that the image in the spatial domain, at any given pixel coordinate, is (usually) defined by a
single, integer brightness level.
IX. Computation Speed-Up
Now, since the DFT uses a sampled function which represents the entire spatial domain image, it
does not contain every single frequency that forms an image; just a set of samples that is large
enough to fully describe it. The number of frequencies in the frequency domain corresponds to
the number of pixels in the spatial domain. This means that the frequency image will be the same
size as the spatial image. The formula above would be the DFT of an N ×M image, where N is
the number of rows and M is the number of columns. The terms in the Fourier domain represent
increasing frequencies, where F (0,0 ) is the DC component and F (N−1 ,M−1 ) represents the
highest frequency. Like mentioned previously, each DFT term is basically a measure of how
much of that frequency is present in the image. The higher the presence of that frequency in the
spatial domain image, the brighter the corresponding pixel in the Fourier domain.
There are three main categories of operations that can be applied to digital images in order to
change an input image to an output image: point, local and global operations. A point operation
is one in which the output value at a certain point depends only on that same point in the input
image. A local operation is one in which the output value at a certain point depends on the input
values in the neighborhood of that same point. A global operation is one in which the output
value at a certain point is dependent on every single value in the input image. Since the DFT
cycles through every pixel in the input image to calculate a point that represents one frequency in
the Fourier domain, it is considered a global operation. Going through the DFT one pixel at a
time is very time consuming and inefficient.
a. Separability
The two-dimensional DFT has the property of separability so that
F (u , v )=∑j=0
N−1
∑k=0
M−1
f ( j , k ) ∙ e−2πi( ujN+ vk
M )
¿∑j=0
N−1 (∑k=0
M−1
f ( j , k ) ∙ e−2πi( vkM ))e−2πi (ujN )
¿∑j=0
N−1
F ( j , v ) ∙ e−2πi( ujN )
Where
F ( j , v )=∑k=0
M−1
f ( j , k ) ∙e−2πi ( vkM )
What’s actually happening here is that we’re performing a 1D transform on each column of
spatial domain image f ( j , k ), yielding the intermediate image F ( j , v ). Then we’re performing
another 1D transform on each row of F ( j , v ), yielding the final Fourier domain image F (u , v ).
In this way, an n-dimensional transform can be computed using n one-dimensional transforms,
thus speeding up the entire process. However even with this speed up, the DFT will still have a
complexity of N2 per pixel (for a square N ×N image), which isn’t very fast. By using another
algorithm, known as the Fast Fourier Transform (FFT), this complexity can be reduced to
N log2 N per pixel. This is a much faster way especially for large images.
b. Fast Fourier Transform
The FFT works by splitting the problem up into a series of smaller problems. It utilizes the
property of symmetry in the DFT. If we have a generic transform:
F ( k )=∑n=0
N−1
f (n ) ∙ e−2πikn
N
We can see that
F (N+k )=∑n=0
N−1
f (n ) ∙ e−2πi (k +N )n
N
¿∑n=0
N−1
f (n ) ∙ e−2πin ∙ e−2πikn
N
Since e−2πin=cos (−2πn )+i sin (−2πn )=1 ∀n∈Z, we find that
F (N+k )=∑n=0
N−1
f (n ) ∙ e−2πikn
N =F (k )
This shows the periodic property of the DFT. Using this knowledge, we can say that
F ( k )=F (nN +k ) ∀n∈Z . While this doesn’t really help us in the current form since 0≤k<N , we
can utilize this fact in a smaller interval after splitting up the summation:
F ( k )=∑n=0
N−1
f (n ) ∙ e−2πikn
N
¿ ∑m=0
N2
−1
f (2m ) ∙ e−2πik ( 2m)
N +∑m=0
N2
−1
f (2m+1 ) ∙ e−2πik ( 2m+1)
N
¿ ∑m=0
N2
−1
f (2m ) ∙ e−2πikm(N /2) +e
−2πikN ∑
m=0
N2
−1
f (2m+1 ) ∙ e−2πikm(N /2)
The single DFT has been split into two terms which are very similar to a single, smaller DFT,
one on the even numbered values, and one on the odd numbered values. Just from these two
terms, we haven’t saved any computation since each term consists of N2
∗N computations for a
total of N2 . The trick comes into play when we use symmetries of each of these terms. Because
0≤k<N and 0≤m< N2
, the symmetry from above means we only need to compute half the
computations for each sub-problem. Ideally, this process would continue until there are N
signals composed of a single point (meaning N is a power of 2), but it isn’t required for the
speed up to be effective.
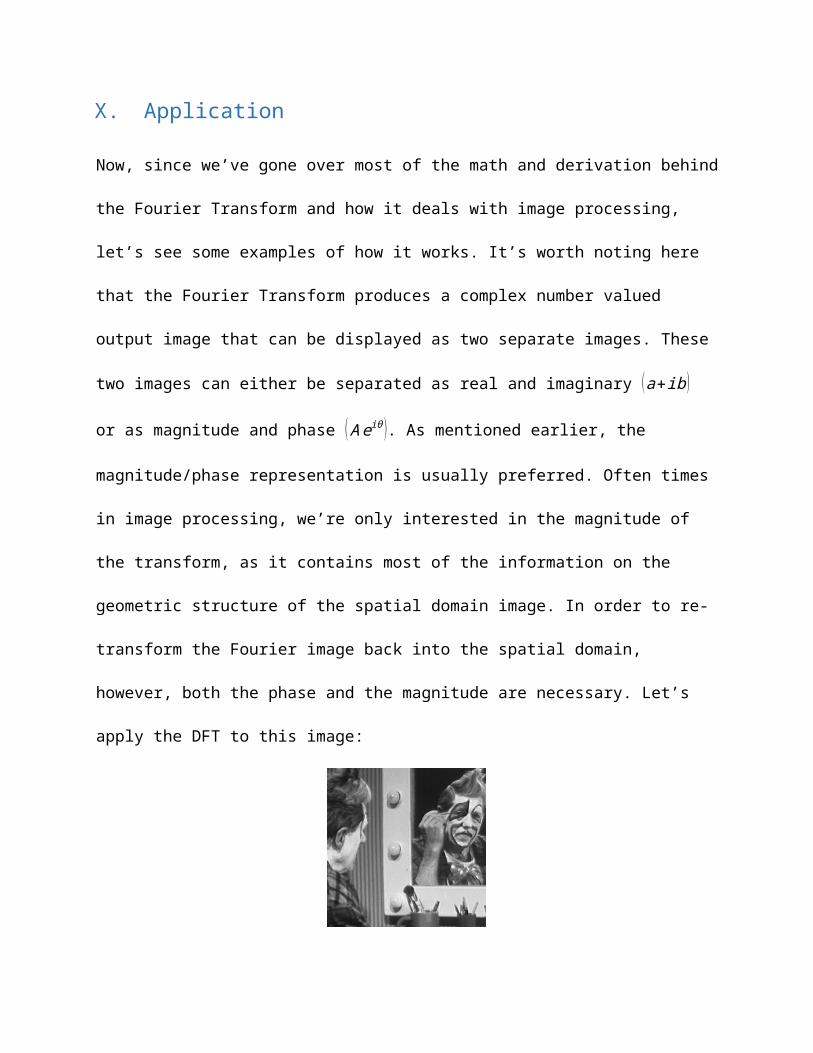
X. Application
Now, since we’ve gone over most of the math and derivation behind the Fourier Transform and
how it deals with image processing, let’s see some examples of how it works. It’s worth noting
here that the Fourier Transform produces a complex number valued output image that can be
displayed as two separate images. These two images can either be separated as real and
imaginary (a+ ib) or as magnitude and phase ( Ae iθ ). As mentioned earlier, the magnitude/phase
representation is usually preferred. Often times in image processing, we’re only interested in the
magnitude of the transform, as it contains most of the information on the geometric structure of
the spatial domain image. In order to re-transform the Fourier image back into the spatial
domain, however, both the phase and the magnitude are necessary. Let’s apply the DFT to this
image:
With the magnitude spectrum of its transform:
With F (0,0 ) (the DC term) shown in the center of the image. The DC value is by far the largest
component of the image. The intensity values of the Fourier coefficients is too large to be
displayed on the screen, so all other values are shown as black.
a. Logarithmic Scaling
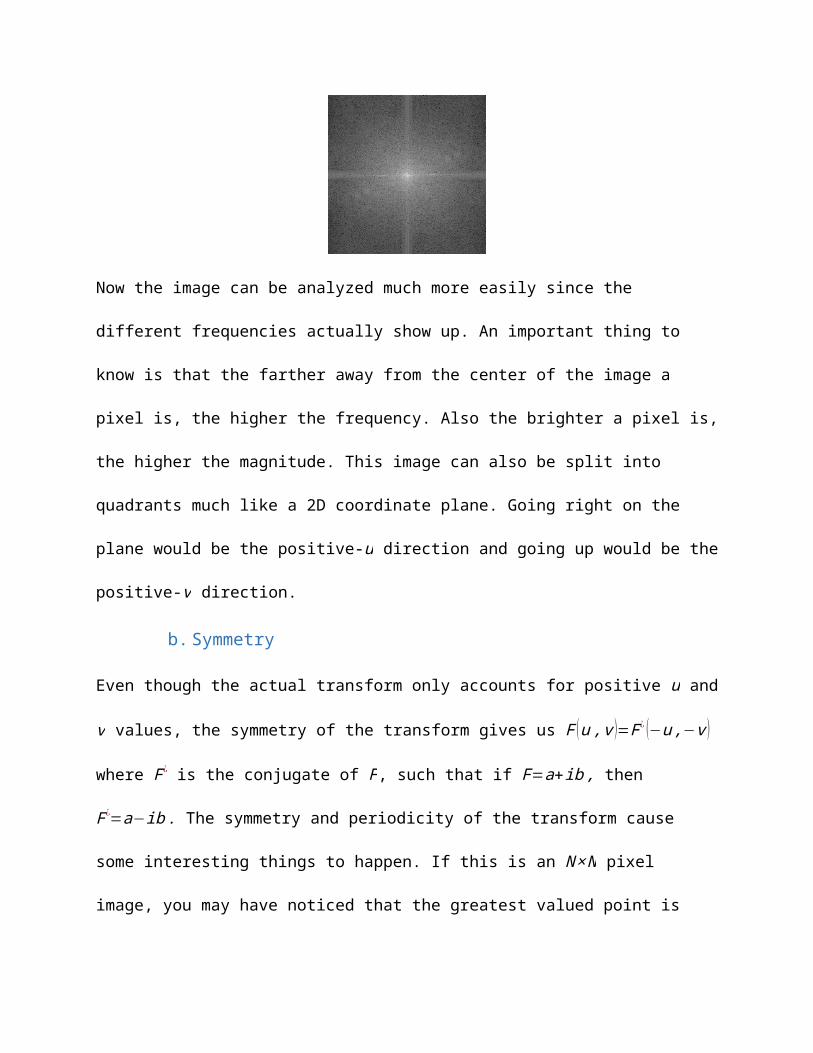
In order for us to see the actual magnitude spectrum of the transform, it is necessary to apply a
logarithmic transformation to it. We can define a new form of the image as
Q (u , v )=c log (1+|F (u , v )|), where c is a scaling constant and is chosen depending on how many
different gray levels are available. The result of this transformation basically compresses the high
magnitude values into a relatively small range and at the same time, enhances the low magnitude
values. After the log transform of the above image, we obtain:
Now the image can be analyzed much more easily since the different frequencies actually show
up. An important thing to know is that the farther away from the center of the image a pixel is,
the higher the frequency. Also the brighter a pixel is, the higher the magnitude. This image can
also be split into quadrants much like a 2D coordinate plane. Going right on the plane would be
the positive-u direction and going up would be the positive-v direction.
b. Symmetry
Even though the actual transform only accounts for positive u and v values, the symmetry of the
transform gives us F (u , v )=F¿ (−u ,−v ) where F ¿ is the conjugate of F, such that if F=a+ib ,
then F ¿=a−ib . The symmetry and periodicity of the transform cause some interesting things to
happen. If this is an N ×N pixel image, you may have noticed that the greatest valued point is
roughly ( N2 ,N2 ), while the lowest valued point is (−N
2,−N
2 ). It turns out that, in the transform,
once we get past u=N2
and v=N2
, we start calculating the negative u and v values in the Fourier
domain. For instance, if N=16 , the frequency found at F (10,3) is actually the exact same value
of the frequency that would be found at F (−6 ,3), where a frequency with the same magnitude,
but an inverted shift (phase) would be found at F (6 ,−3). For this reason, any frequency F (u , v )
in the Fourier domain will have an identical looking frequency reflected over the origin of the
magnitude spectrum. As a result, this means that calculating F (10 ,3 ) automatically gives us the
magnitude of F (6 ,13 ) with an inverted phase, or F (u , v )=F¿ (N−u ,N−v ) . This is how
symmetry can be used to speed up the calculation process. To make sure this piece of
information is understood, let’s look at another transform:
The image on the right is the Fourier transformed image of the image on the left. Notice how the
origin is in the top left corner of both images. Due to the periodicity of the frequency domain,
any point beyond the line u=N2
or v=N2
(or both) is actually identical to a point on the opposite
side of the origin. This is why a a “quadrant swap” can be done to obtain:
This is the desired form of the transform since it displays an entire period with the origin at the
center of the image.
c. Magnitude and Phase
So, going back to the magnitude spectrum of the image with the clown,
Clearly, the image contains components of most frequencies, but the pixels get darker along the
edge of the image, indicating that the magnitude of higher frequencies is smaller than the
magnitude of lower frequencies. This tells us that most of the original image information is
defined by lower frequency components. At this point, the reader may be wondering what the
phase spectrum is used for, and what its significance is. The answer to that question is that,
although the phase spectrum can tell us a lot about the position of the frequencies in the original
image, it is hardly ever used in image processing since we’re mostly interested in the geometrical
structure. The significance of the phase spectrum comes into play when performing the inverse
DFT because both the magnitude and phase information are required to bring us back to the
original spatial domain. Here is what just the phase spectrum of the clown image looks like:
And here’s what the inverse of just the magnitude spectrum looks like:
This second image contains exactly the same frequencies and number of frequencies as the
original image, but it is obviously unrecognizable. This brings us to the conclusion that, while
the phase spectrum can be ignored in the Fourier domain, it can’t be completely ignored in image
processing because it does contain crucial information.
d. Convolution
To actually edit pictures in the Fourier domain, we can utilize a property of the Fourier
Transform that says it is distributive over addition. Due to this property, we can add the Fourier
domain magnitude spectra of two different images to produce a single image, and perform the
inverse DFT to yield an image that would be the same as if we had added the two spatial domain
images together directly. To illustrate this, let’s use an example.
Where the image on the left is the spatial domain image and the image on the right is the shifted
and scaled Fourier domain image. By the way, this is just a simple example, but the Fourier
domain image shows magnitudes going along the diagonal because that’s where the image
intensity changes the most in the spatial domain image. Let’s use another image to add to this
one.
Now let’s see what happens when we perform the inverse DFT on the addition of the two Fourier
domain images:
As you can see, the spatial domain image corresponding to the addition of the two Fourier
domain images shows the two spatial domain images added together. In fact, according to the
distributivity law, the final image is the same as if we had directly added the two spatial domain
images together in the first place. Therefore we could have done this operation in the spatial
domain first to yield the added Fourier domain image, however there is usually no practical
application to doing it in that order.
Mathematically speaking, this isn’t actually addition, but multiplication in the Fourier domain.
The property mentioned deals with convolution: convolution in the spatial domain is equivalent
to multiplication in the Fourier domain. The convolution operation of two functions (spatial
domain images in this case) yields a third function that expresses how the graph of one is
modified by the other. This is one of the most important properties of the Fourier Transform. The
Convolution Theorem sates that
F {f∗g }=k ∙F {f }∙ F {g }
Where F {f } is the Fourier Transform of f , ¿ is the convolution operator, and k is a constant that
depends on the normalization constant used in the Fourier Transform. In the above example, the
multiplication of the Fourier domain images could be represented as F {f } ∙F {g } where taking its
inverse would give f∗g, the two spatial domain images added together.
e. Filtering
Extending this idea, we can filter out unwanted frequencies from images in a relatively simple
way. Instead of using the convolution operator in the spatial domain, we can just multiply in the
Fourier domain. A few examples I will go over are low pass filtering, high pass filtering, and
noise removal.
i. Low Pass Filtering
Low pass filtering can be used to blur an image. It will simply define a circle of a certain radius
centered at the origin where only frequencies inside the circle will “pass” through it.
Here is another example of an image with its Fourier transformed image. We can filter out the
higher frequencies with a Fourier domain circle like this:
Multiplying this filter image by the Fourier domain image will produce another Fourier image
like this:
Then, applying the inverse transform on the new Fourier image will produce a new, blurred
spatial domain image:
Filtering out the higher frequencies from the Fourier domain image effectively gets rid of a lot of
the sharp edges in the picture, preserving only the broad, smooth regions. A smaller circle will
produce an image with more blur, and a larger circle will produce an image with less blur.
ii. High Pass Filtering
The converse of a low pass filter is called a high pass filter. This filter can be used for edge
detection in certain applications. Using the same Fourier domain image as with the low pass
filter example, we can choose to filter out smaller frequencies, and thus preserve only edges
where the brightness change is the greatest.
iii. Noise Removal
Noise removal works in a very similar way, only we need to know where the noise is at before
we filter it out.
In this example, the noise appears as the four star-like dots with one in each quadrant. We can
mask out these spikes of unwanted frequencies to obtain:
There are a plethora of more advanced uses for the Fourier Transform when it comes to image
processing, but these last three examples are just some of the basics so that the reader can get a
good understanding of what is actually happening.
XI. Conclusion
In conclusion, Jean-Baptiste Joseph Fourier used sines and cosines to represent continuous,
periodic functions to come up with a solution to the general heat equation. Since his discovery,
that idea has been expanded to represent non-periodic functions with what has come to be known
as the Fourier Transform. Even though the Continuous Fourier Transform works perfectly fine
for continuous signals, the Discrete Fourier Transform is preferred in image processing because
its input is a discrete signal which is represented with an image of pixels. Furthermore, the
DFT’s symmetrical properties can be utilized to yield the Fast Fourier Transform algorithm
which drastically reduces computation times in computers. With the magnitude/phase
representation of the DFT, we can separate their spectra to analyze the results. Shifting and
scaling the magnitude spectrum of the transform allows one full period centered at the origin to
be displayed in a single image. This new Fourier domain image can be edited and filtered in
certain ways to remove unwanted frequencies, which can be understood with the Convolution
Theorem. There exist many papers and websites describing Fourier Analysis in deeper detail,
and go beyond the scope of this paper. The interested reader should be directed to the references
page to find just a few of such sources.
References(2014, October 27). Retrieved from Dictionary.com: dictionary.reference.com
Acharya, T., & Ray, A. K. (2005). ImageProcessing:PrinciplesandApplications. John Wiley & Sons.
ComplexFormofFourierSeries. (2014). Retrieved from Math24.net: www.math24.net/complex-form-of-fourier-series.html
Fisher, R., Perkins, S., Walker, A., & Wolfart, E. (2003). FourierTransform. Retrieved from HIPR2: http://homepages.inf.ed.ac.uk/rbf/HIPR2/fourier.htm
Glynn, E. F. (2007, February 14). FourierAnalysisandImageProcessing. Retrieved from http://research.stowers-institute.org/efg/Report/FourierAnalysis.pdf
Hel-Or, Y. (2010, Spring). Image Processing (PowerPoint).
Konttinen, J., Pyka, P., & Kangas, M. (Retrieved 2014). Fourier Transform in Image Processing. Lappeenranta University of Technology.
Lehar, S. (n.d.). AnIntuitiveExplanationofFourierTheory. Retrieved from http://cns-alumni.bu.edu/~slehar/fourier/fourier.html
Smith, J. O. (n.d.). MathematicsoftheDiscreteFourierTransform(DFT). Retrieved from DSP Related: www.dsprelated.com/dspbooks/mdft/
Tanja, H. C. (2007). AdvancedEngineeringMathematics:Volume2. I. K. International Pvt Ltd.
Vanderplas, J. (2013, August 28). UnderstandingtheFFTAlgorithm. Retrieved from Pythonic Perambulations: https://jakevdp.github.io/blog/2013/08/28/understanding-the-fft/
Wang, R. (2007, November 15). FourierAnalysisandImageProcessing. Retrieved from fourier.eng.hmc.edu: fourier.eng.hmc.edu/e101/lectures/image_processing/Image_Processing.html
Weinhaus, F. (2011, October 27). ImageMagickv6Examples--FourierTransforms. Retrieved from imagemagick.org: http://www.imagemagick.org/Usage/fourier/
Young, I. T., Gerbrands, J. J., & van Vliet, L. J. (2007). Fundamentals of Image Processing. Delft University of Technology.