13
Fundamentals of Computational Neuroscience 2e Thomas Trappenberg March 28, 2009 Chapter 10: The cognitive brain

Fundamentals of ComputationalNeuroscience 2e
Thomas Trappenberg
March 28, 2009
Chapter 10: The cognitive brain

Hierarchical maps and attentive vision
Posterior
Inferior
V4
V2
V1
LGN
temporal cortex
ocipital cortex
thalamus
}
A. Ventral visual pathway B. Layered cortical maps
Eccentricity / deg
Rec
eptiv
e Fi
eld
Size
/ de
g
50
20
8.0
3.2
1.3
50208.03.21.30
Layer 4
Layer 3
Layer 2
Layer 1Layer 1
Layer 4
Layer 2
Layer 3

Attention in visual search and object recognition
Given :
Particular Features ( Target Object )
Function :
Scanning ( Attentional Window Scanns the
Entire Scene )
WHERE
Visual search
Given :
Particular features ( target object )
Function :
Scanning ( attentional window scans the
entire scene )
WHERE
Object Recognition
Given :
Particular Spatial Location ( Target Position)
Function :
Binding ( Attentional Windo Bind Features
for Identification )
WHAT
Object recognition
Given :
Particular spatial location ( target position)
Function :
Binding ( attentional window binds features
for identification )
WHAT
Gustavo Deco

Model
Inhibitory pool
Inhibitory pool
....
....
Visual field
Inhibitory Pool
Inhibitory pool
( )
„ “
„ “
Locus attentional preferred
Gabor jets
IT ( Object recognition )
PP Spatial location
V1 V4 (Feature
extraction )
LGN
Where
What
Top down bias ( Object specific ) Top down bias
( Location specific )

Example results
E X
X
Time
Number of items 1 2 3
PP
Number of items 1 2 3
PP
E F F
E F F
Time
Act
ivity
2 3
Act
ivity
A. “Parallel search” B. “Serial search”

The interconnecting workspace hypothesis
Globalworkspace
Evaluativesystem
(VALUE)
Long-termmemory(PAST)
Attentionalsystem
(Focusing)
Perceptual system (PRESENT)
Motorsystem
(FUTURE)

Stroop task modelling
A. Stroop task B. Workspace model for stroop task
grey
black
word naming
colournaming
image
task
grey
greyblack
black
COLOURblack
NAMING RESPONSE black
INPUTS & OUTPUTS
SPECIALIZED PROCESSORS
WORKSPACE NEURONS
REWARD(error signal)
VIGILANCE
attentionalsupression
of word
attentionalamplification
of colour
WORDgrey

The anticipating brain
1. The brain can develop a model of the world, which can be usedto anticipate or predict the environment.
2. The inverse of the model can be used to recognize causes byevoking internal concepts.
3. Hierarchical representations are essential to capture the richnessof the world.
4. Internal concepts are learned through matching the brain’shypotheses with input from the world.
5. An agent can learn actively by testing hypothesis throughactions.
6. The temporal domain is an important degree of freedom.
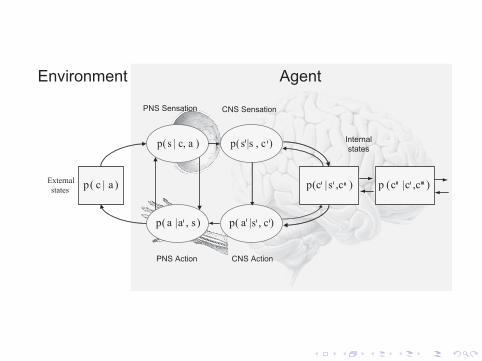
Agent Environment
) | c, a ( s p
) | ( a , s p a
,c ) | ( s p c ) | ( a c p External states
PNS Sensation
PNS Action
) |s , c ( s p
) ( p a
CNS Action
Internal states
c ,c ) | ( p c
CNS Sensation
|s , c

Recurrent networks with hidden nodes
The Boltzmann machine:
Hiddennodes
Visiblenodes
Energy: Hnm = − 12
∑ij wijsn
i smj
Probabilistic update: p(sni = +1) = 1
1+exp(−βP
j wij snj )
Boltzmann-Gibbs distribution: p(sv ; w) = 1Z
∑m∈h exp(−βHvm)

Training Boltzmann machine
Kulbach-Leibler divergence
KL(p(sv ),p(sv ; w)) =v∑s
p(sv ) logp(sv )
p(sv ; w)
=v∑s
p(sv ) log p(sv )−v∑s
p(sv ) log p(sv ; w)
Minimizing KL is equivalent to maximizing the average log-likelihoodfunction
l(w) =v∑s
p(sv ) log p(sv ; w) = 〈log p(sv ; w)〉.
Gradient decent→ Boltzmann Learning∆wij = η ∂l
∂wij= η β2
(〈sisj〉clamped − 〈sisj〉free
).

The restricted Boltzmann machine
Hidden nodes
Visible nodes
Boltzmann machine Restricted Boltzmann machine
Contrastive Hebbian learning: Alternating Gibbs sampling
t=1 t=2 t=3 t= 8

Model retina
RBM layers
Recognition readout and stimulation
Image input
Concept input

















