ORIGINAL ARTICLE GA and ICA approaches to job rotation scheduling problem: considering employee’ s boredom Ashkan Ayough & M. Zandieh & H. Farsijani Received: 8 September 2010 / Accepted: 13 September 2011 # Springer-Verlag London Limited 2011 Abstract This paper presents a new model dealing with the job rotation scheduling problem, which is less studied, focusing on human characteristics such as boredom. Existing literature on conceptualizing boredom shows that researchers evaluate boredom in terms of exposure to the same tasks. We developed it to “exposure to similar tasks” and defined its functionality based on the need of assigning jobs with more similarity to each worker in the smallest period of planning which lowers the external interruption effect on worker ’ s concentration. To address the imbalance between number of jobs and that of workers in many industrial settings, we developed a multi-period imbalance assignment model. The proposed model is to rotate workers during a given planning horizon such that the total cost including assignment and boring cost will be minimized. The applicability of the model is described by presenting some real cases and validated through solving several randomly produced test problems by using Lingo software. Two search algorithms, genetic algorithm (GA) and imperialist competitive algorithm (ICA), designed to con- quer the algorithmic complexity of model and their parameters adjusted using Taguchi’ s method were used. The efficiency of algorithms is shown, comparing it with Lingo computation times, and it is shown that ICA solutions have better quality than GA solutions as well. Keywords Job rotation scheduling . Functional and dysfunctional boredom . Nonlinear integer programming . Genetic algorithm . Imperialist competitive algorithm . Taguchi’ s design of experiments 1 Introduction Job rotation is one of the strategies used to motivate employees assigned to repetitive tasks. Many organizations make use of this strategy to have multi-skilled and cross- functional workers. However, as some researchers reported, it is likely to gain no improvement in employee’s performance [6]. According to Bhadury and Radovilsky [6], applying rules without purposeful measures do not result in improving performance. Therefore, it is required to develop models based on more useful rules to enhance the effectiveness of job rotation through modifying the way of scheduling what jobs are to be assigned to certain employ- ees [6]. Job rotation scheduling problem (JRSP) is generally structured as a multi-period assignment model, which has a great deal of feasible rotations impossible to be enumerated and evaluated for optimality by mathematical programming approaches particularly for large-size problems. Thus, developing heuristic approaches to it is necessary [28]. In this article, we present a nonlinear integer model, which gives new idea to calculate the boredom cost through introducing functional and dysfunctional boredom caused by similarities of the jobs assigned, so that boredom costs will be incorporated into job rotation scheduling as well as assignment costs, and the effectiveness of managerial decisions will be improved accordingly. Furthermore, two metaheuristics, genetic and imperialist competitive algo- rithms (ICAs), are developed to find solutions that are more efficient, and the quality of their best solutions has been compared. A. Ayough : M. Zandieh (*) : H. Farsijani Management and Accounting Faculty, Department of Industrial Management, Shahid Beheshti University, G.C., Tehran, Iran e-mail: [email protected]Int J Adv Manuf Technol DOI 10.1007/s00170-011-3641-7
Transcript
ORIGINAL ARTICLE
GA and ICA approaches to job rotation scheduling problem:considering employee’s boredom
Ashkan Ayough & M. Zandieh & H. Farsijani
Received: 8 September 2010 /Accepted: 13 September 2011# Springer-Verlag London Limited 2011
Abstract This paper presents a new model dealing with thejob rotation scheduling problem, which is less studied,focusing on human characteristics such as boredom.Existing literature on conceptualizing boredom shows thatresearchers evaluate boredom in terms of exposure to thesame tasks. We developed it to “exposure to similar tasks”and defined its functionality based on the need of assigningjobs with more similarity to each worker in the smallestperiod of planning which lowers the external interruptioneffect on worker’s concentration. To address the imbalancebetween number of jobs and that of workers in manyindustrial settings, we developed a multi-period imbalanceassignment model. The proposed model is to rotate workersduring a given planning horizon such that the total costincluding assignment and boring cost will be minimized.The applicability of the model is described by presentingsome real cases and validated through solving severalrandomly produced test problems by using Lingo software.Two search algorithms, genetic algorithm (GA) andimperialist competitive algorithm (ICA), designed to con-quer the algorithmic complexity of model and theirparameters adjusted using Taguchi’s method were used.The efficiency of algorithms is shown, comparing it withLingo computation times, and it is shown that ICAsolutions have better quality than GA solutions as well.
Job rotation is one of the strategies used to motivateemployees assigned to repetitive tasks. Many organizationsmake use of this strategy to have multi-skilled and cross-functional workers. However, as some researchers reported,it is likely to gain no improvement in employee’sperformance [6]. According to Bhadury and Radovilsky[6], applying rules without purposeful measures do notresult in improving performance. Therefore, it is required todevelop models based on more useful rules to enhance theeffectiveness of job rotation through modifying the way ofscheduling what jobs are to be assigned to certain employ-ees [6]. Job rotation scheduling problem (JRSP) is generallystructured as a multi-period assignment model, which has agreat deal of feasible rotations impossible to be enumeratedand evaluated for optimality by mathematical programmingapproaches particularly for large-size problems. Thus,developing heuristic approaches to it is necessary [28].
In this article, we present a nonlinear integer model,which gives new idea to calculate the boredom cost throughintroducing functional and dysfunctional boredom causedby similarities of the jobs assigned, so that boredom costswill be incorporated into job rotation scheduling as well asassignment costs, and the effectiveness of managerialdecisions will be improved accordingly. Furthermore, twometaheuristics, genetic and imperialist competitive algo-rithms (ICAs), are developed to find solutions that are moreefficient, and the quality of their best solutions has beencompared.
A. Ayough :M. Zandieh (*) :H. FarsijaniManagement and Accounting Faculty, Department of IndustrialManagement, Shahid Beheshti University, G.C.,Tehran, Irane-mail: [email protected]
Int J Adv Manuf TechnolDOI 10.1007/s00170-011-3641-7
2 Literature review
JRSP is a subset of human resources scheduling problem,which aims to assign jobs to operators during a specifiedperiod so that the cost of assignment including workforceand opportunity costs will be minimized. Here, opportunitycosts mean any costs incurred by reduction in individualproductivity, ergonomic or safety issues, etc. Some exam-ples of individual productivity are learning, elaboratingskills, motivation and job satisfaction, and risks in exposureto dangerous cases in work environment, machine–operatoroperations, and material are instances of ergonomic andsafety issues [7, 28]. Thus, incorporating human factorsinto human scheduling problems is clearly essential [21].
Job rotation is defined as a strategy to diversify the tasksassigned to individuals as well as developing associatedskills [11, 20]. The main determinant of adopting jobrotation formerly was job specialization, and the purposepursued was to minimize the degree of monotony,boredom, and fatigue [15]. However, there exist someother determinants to the adoption of job rotation such asfirm and workforce characteristics, HRM practices [12], jobcomplexity, variety of products, and multi-skilling policies[15] whereas theories encourage adopting job rotationalmost always, supported by learning, motivation, andgenerally human factors. Recently, dynamic and autono-mous nature of jobs in modern Japanese companiesencourage them to rotate workers frequently, adapting morewith work teams to develop organizational learning as wellas human learning [29]. Job rotation is also applied toenhance problem-solving skills in lean production systems[1]. Job rotation is applied in a variety of manufacturingcompanies, advanced industrial systems such as cellularmanufacturing systems, and service organizations likehospital, police department, fire-fighting center, travelingcompanies, etc. [7, 28]. However, advantages of jobrotation practice in performance improvement are certainlynot shown [6]. Wilkinson and Edwards, providing the firststudy on job rotation, showed that the system with twooperators and rotating jobs had the better performance thanthe system with three operators and no rotating jobs [28].Paul et al. [26] concluded a decrease in operator’s workloadby using job rotation. In Griffin’s discussion on someimplementation case studies, it was posited that job rotationhas not been successful in improving either by motivatingor satisfying employees [17]. In contrary to that, somestudies reported successful improvements in employee’ssatisfaction through rotating jobs [6]. Desai et al. [10]reported that ergonomic job rotation strategy led to morepositive effects on cumulative trauma than the strategy withno ergonomic considerations.
In spite of researcher’s interest in studying the effects ofjob rotation, few research were carried out to develop and
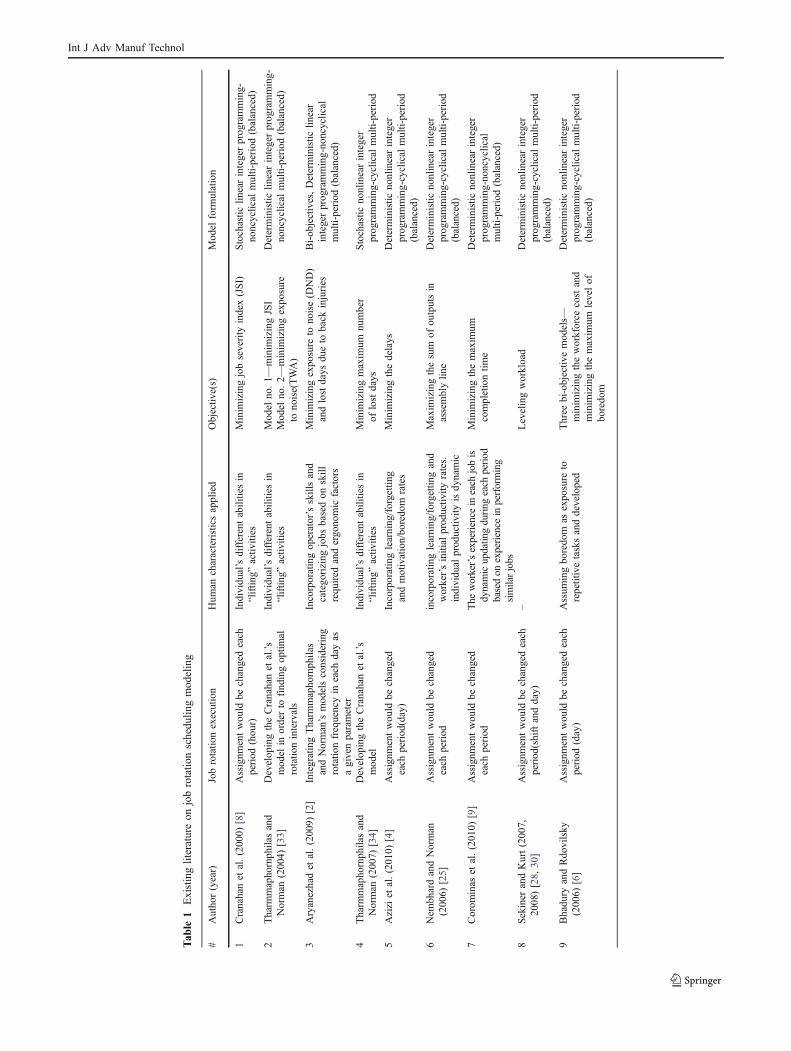
solve job rotation scheduling models. Table 1 summarizesour exhaustive review of literature in modeling JRSP. Asshown, majority of authors have studied adopting jobrotation regarding ergonomic concerns and little researchaddressed human behavior, which is likely to be influencedby scheduling decisions [21] and consequently could affecthuman performance.
Since Table 1 presents the complete descriptions onprevious studies, only the authors’ evaluation of relevantstudies will be briefly discussed. Tharmmaphornphilas andNorman [33] reported that there are existing studies whichhave not addressed adequately the details (jobs to berotated, rotation intervals, and human-task sequence) to bedetermined for job rotation scheduling. They proposedconsidering human productivity as well as ergonomicmeasures and developing unbalanced assignment models.Nembhard and Norman [25] argued that no clear guidelineexists for human-task sequencing problem so they sup-ported modeling worker’s productivity as the function ofhuman learning and forgetting. Aryanezhad et al. [2]highlighted the cogency of applying multi-objective modelsto match more with real settings. One of the most importanthuman behavior aspects is boredom. Boredom is definedaccording to Fisher’s review (1993, p. 396) as “anunpleasant, transient affective state in which the individualfeels a pervasive lack of interest in and difficultyconcentrating on the current activity … [and] feels that ittakes conscious effort to maintain or return attention to thatactivity.” Many surveys found a significant correlationbetween repetitive tasks and boredom as reported by Aziziet al. [4], Bhadury and Radovilsky [6], Fisher [13],Loukidou et al. [22], Vodanovich [35], etc.
However, worker’s boredom has seemingly beenneglected from consideration, in both organizational be-havior and production management fields of study [4, 13,22]. Lodree et al. [21] in their comprehensive literaturereview proposed considering boredom in modeling human-task sequencing problems. It is in line with what Bhaduryand Radovilsky [6] reported as the main challenge indeveloped models of job rotation scheduling such that it hasproper effect on improving employee’s productivity. Aziziet al. [4] and Bhadury and Radovilsky [6] addressed thelack of developing any model for boredom to be used inJRSP. Azizi et al. [4] assumed that like many other naturalphenomena, boredom might behave exponentially anddeveloped a model in which the worker’s boredom relatedto delays with linear estimation. The model incorporates theeffect of learning/forgetting and motivation/boredom ondelays independently and requires many input parameters,and estimating each of them is not straightforward. Bhaduryand Radovilsky [6] assumed boredom as exposure torepetitive tasks and developed three bi-objective modelsclaiming to be more effective and realistic than the previous
Int J Adv Manuf Technol
Tab
le1
Existingliteratureon
jobrotatio
nschedu
lingmod
eling
#Author(year)
Jobrotatio
nexecution
Hum
ancharacteristicsapplied
Objectiv
e(s)
Model
form
ulation
1Cranahanet
al.(200
0)[8]
Assignm
entwou
ldbe
changedeach
period
(hou
r)Individu
al’sdifferentabilitiesin
“liftin
g”activ
ities
Minim
izingjobseverity
index(JSI)
Stochastic
linearintegerprogramming-
noncyclical
multi-period
(balanced)
2Tharm
mapho
rnphilasand
Norman
(2004)
[33]
DevelopingtheCranahanet
al.’s
mod
elin
orderto
findingop
timal
rotatio
nintervals
Individu
al’sdifferentabilitiesin
“liftin
g”activ
ities
Mod
elno
.1—
minim
izingJSI
Deterministic
linearintegerprogramming-
noncyclical
multi-period
(balanced)
Mod
elno
.2—
minim
izingexposure
tono
ise(TWA)
3Aryanezhadet
al.(2009)
[2]
IntegratingTharm
mapho
rnphilas
andNorman’smod
elsconsidering
rotatio
nfrequencyin
each
dayas
agivenparameter
Incorporatingoperator’sskillsand
categorizing
jobs
basedon
skill
required
andergonomic
factors
Minim
izingexpo
sure
tono
ise(D
ND)
andlostdays
dueto
back
injuries
Bi-objectives,Deterministic
linear
integerprogramming-noncyclical
multi-period
(balanced)
4Tharm
mapho
rnphilasand
Norman
(2007)
[34]
DevelopingtheCranahanet
al.’s
mod
elIndividu
al’sdifferentabilitiesin
“liftin
g”activ
ities
Minim
izingmaxim
umnu
mber
oflostdays
Stochastic
nonlinearinteger
programming-cyclical
multi-period
5Azizi
etal.(201
0)[4]
Assignm
entwou
ldbe
changed
each
period
(day)
Incorporatinglearning/forgetting
andmotivation/bo
redo
mrates
Minim
izingthedelays
Deterministic
nonlinearinteger
programming-cyclical
multi-period
(balanced)
6Nem
bhardandNorman
(2006)
[25]
Assignm
entwou
ldbe
changed
each
period
incorporatinglearning/forgetting
and
worker’sinitial
productiv
ityrates.
individu
alprod
uctiv
ityisdy
namic
Maxim
izingthesum
ofou
tputsin
assemblylin
eDeterministic
nonlinearinteger
programming-cyclical
multi-period
(balanced)
7Corom
inas
etal.(201
0)[9]
Assignm
entwou
ldbe
changed
each
period
The
worker’sexperience
ineach
jobis
dynamicupdatin
gduring
each
period
basedon
experience
inperforming
similarjobs
Minim
izingthemaxim
umcompletiontim
eDeterministic
nonlinearinteger
programming-noncyclical
multi-period
(balanced)
8Sekiner
andKurt(200
7,20
08)[28,
30]
Assignm
entwou
ldbe
changedeach
period(shiftandday)
–Levelingworkload
Deterministic
nonlinearinteger
programming-cyclical
multi-period
(balanced)
9Bhadury
andRdo
vilsky
(2006)
[6]
Assignm
entwou
ldbe
changedeach
period
(day)
Assum
ingbo
redom
asexpo
sure
torepetitivetasksanddeveloped
Three
bi-objectiv
emod
els—
minim
izingtheworkforce
costand
minim
izingthemaxim
umlevelof
boredom
Deterministic
nonlinearinteger
programming-cyclical
multi-period
(balanced)
Int J Adv Manuf Technol
models. The models are to minimize the workforce cost andthe maximum level of boredom due to assigning the samejobs to the operator during the planning horizon. Recently,there has been an interest in studying the similarity of jobsand its relevance to human behaviors and job rotation [9,36]. In this article, we develop the concept of boredom andthe job rotation scheduling model presented by Bhaduryand Radovilsky [6] and present efficient metaheuristicalgorithms to solve that. As shown in Table 1, modelingJRSP generally requires the multi-period assignment struc-ture with integer variables and nonlinear statements. Thus,developing efficient algorithms is addressed by Aryanezhadet al. [2] and Azizi et al. [4]. Sekiner and Kurt [30] usedsimulated annealing (SA) and ant colony optimization(ACO) approaches to solve their proposed model moreefficiently. Azizi et al. [4] developed a search algorithmcalled SAMED-JR to solve large job rotation problems andshow its efficiency as compared with genetic algorithm(GA) and SA.
In the next section, our proposed model will beexplained in details, and Section 4 presents the modelvalidation. Thereafter, the designing of developed GA andICA, tuning of parameters, computation results, and otherfindings are discussed in Section 6. Finally, Section 7 givesthe conclusion and future research guidelines.
3 Problem modeling
We are to present a new multi-period imbalance assignmentmodel to JRSP considering employee’s boredom. Inaddition, to conceptualize boredom, its functionality isdefined to match more with industrial settings in whichimbalance between the number of operators and jobs forcesthe decision maker to assign at least one job to eachoperator per each planning period. The model rotates jobsamong operators during planning horizon so that the totalcost including assignment and boredom costs will beminimized.
3.1 Assumptions
The assumptions used to build our model are listed below:
1. The number of jobs is larger than the number ofoperators so at least one job will be assigned to eachoperator in each period.
This assumption states that the assignment model isimbalance. In many real settings, especially in modernproduction systems, there is an imbalance between thenumber of certain workers and tasks to be performedas Malhotra et al. [23] indicated. However, as oursummarized review of literature in Table 1 shows,
researchers’ tendency has been focused on the balancesystems. The match between this assumption andsome industrial settings will be further discussed inSubsection 4.1.
2. Each job assigned to each operator must be completedby him/her.
This assumption refers to one of the classicconstraints in the assignment problem.
3. Each job is only assigned at one time in each period.This assumption refers to one of the classic
constraints in the assignment problem.4. The number of periods is known in advance and
planning horizon at least includes two periodsThis assumption assumed to construct any deter-
ministic multi-period model.5. The number of jobs and operators is constant and
cannot be changed during the planning horizon.This assumption states that absenteeism is not
considered and no new job is entered to the shopdue to any design changes or new orders. Accordingto Corominas et al. [9], this assumption supports thatchanges in assignment during a given planning periodare not possible and facilitates the formalization of theproblem.
6. The number of available operators is sufficient forassigning to jobs during the planning horizon.
This assumption states that understaffing is notallowed, and existing employees obviate the requiredwork during planning horizon. It is necessary to notethat personnel scheduling problems almost alwaysrequire the number of employees as a given output.This assumption is in line with other studies listed inTable 1.
7. All jobs must be done in the planning horizon andcannot be postponed.
This assumption assumed that shortages in aplanning horizon (cycle) is not allowed.
8. There is no available time limitation in each period foreach operator to perform assigned jobs.
It is assumed that the length of a period is enoughto make this possibly assigning several jobs to eachoperator by itself or because of allowed overtime. Theupper limit for the length of a period operationalizedthrough the assumption 10.
9. There is no limitation for each operator’s availabilityin each period.
This assumption states that the operators arededicated to the cell during the planning horizon.
10. Assigning similar jobs assumed to be favorable ineach period and unfavorable during more than oneperiod.
This assumption supports the functionality ofboredom introduced for the first time in this article.
Int J Adv Manuf Technol
It is supposed that a period has to be short enough toprevent operators from internal interrupting. Internalinterruption according to Fisher [13] causes theoperator to have attentional difficulties performinghis (her) repetitive assignments. Thus, the effect ofinternal interruption in any period is neutralized bysetting proper length of periods and external interrup-tion plays the main role in giving rise to attentionaldifficulties for each operator. External interruptionhappens whenever the operator shifts from one job toanother during a period and thereupon needs to adjusthis (her) concentration. So assigning similar jobs willbe favorable in each period. Since we will measureboredom in terms of exposure to the similar tasks,boredom is evaluated favorable during each period.On the other hand, for the time profile greater than aperiod, the internal interruption is not automaticallycontrolled anymore. Thus, boredom or exposure to thesimilar tasks will not be functional so we labeled it asdysfunctional.
11. All parameters of model are deterministic and constantduring planning horizon.
These assumptions can be categorized as follows:
(a) Classic assumptions required to model an assignmentproblem (1, 3)
(b) General assumptions required to model a multi-periodassignment problem (4, 5, 6, 7, and 9).
(c) General assumptions required to model an imbalanceassignment problem (1, 8).
(d) Assumptions for modeling and conceptualizing bore-dom (8, 10).
(e) General assumptions required to construct determinis-tic model (11).
Almost all except assumptions 1, 8, and 10 are appliedby other authors as listed in Table 1 to model theirdeterministic multi-period-structured JRSPs. These authorsdiscussed mentioned assumptions either explicitly orimplicitly.
Assumption 1 directly refers to the novelty of ourproposed model addressing an imbalance between thenumber of certain workers and tasks to be performedas Malhotra et al. [23] indicated. We also assume that thelength of periods is given in line with assumptions 8and 10.
3.2 Definitions and model symbols
Let the number of periods (without losing generality,thereafter each period assumed as one working day),operators and jobs be equal to K, I and J, respectively.
Indices, parameters, and decision variables of model aredefined as follows:
Indices:
i The index of operators (i=1, 2, ⋯,I)
j The index of jobs (j=1, 2, ⋯,J)
k The index of days (k=1, 2, ⋯,K)
Parameters:
ckij Cost of performing job j by operator i inthe period (working day) k
Pj′j Similarity degree of jobs j and j′ such that8j; j0 : pj0j ¼ pj0j; 0 � pj0j � 1
Days-of-ROTN(DOR)
Time profile including two or moresuccessive periods in which the totalsimilarity of jobs assigned to each operatoris calculated. Namely, to control the totalsimilarity of jobs assigned to operator i upto the dayk, the days from k � DORþ 1to k must be included in the calculations.
ai The cost of boredom felt by operator idue to similarity of jobs assigned duringthe planning horizon.
Decision variables:
xkij If job j assigned to operator i in the period k will beequal to one, otherwise zero.
zi If the total calculated boredom for operator i is calculatedequal to any negative value, will be equal to zero, elseone.
To calculate the cost of boredom caused by assigningsimilar jobs to each operator during the planning horizon,some definitions presented as follows:
Definition (1) The similarity of every two jobs: thesimilarity of every two jobs is thedegree to which two jobs are similar toeach other. Obviously, it is a numberbetween zero (in the case of no similar-ity) and one (in the case of the samejobs). Similarity is a general term, whichmay pertain to different purposes and inour definition; it can be used as varietyof practical cases. For instance, a plantmanager might be concerned about theergonomic issues related to the static anddynamic tasks assignable to operators. Thus,he (she) may aim to categorize the tasksbased on the degree of being static ordynamic and define the similarity of eachtwo tasks considering its categories and as a
Int J Adv Manuf Technol
percentage, finding a way to assign tasks toeach operator in balance. Wells et al. [36]presented an approach to quantifying thefunctional similarity of manual tasks withapplication in preventing musculoskeletaldisorders. In addition, similarity can beestimated according to working with familyof machines, procedure of performingduties, exposure to dangerous environ-ments, required precision and mental worketc. in our point of view, the possible degreeof freedom in defining and calculatingsimilarity would add flexibility and appli-cability to the model presented. Applyingthe similarity degree of jobs is the mainnovelty of this article. After estimating thesimilarity of each two jobs, the similaritymatrix, PJ×J will be prepared.
Definition (2) Functional (positive) boredom:
A. Operator i’s functional boredom in period k �Bþ i; kð Þ� is felt due to the favorable similarityrequired to concentrate on the tasks during eachperiod. If only one job assigned to operator ina given day, functional boredom will be equalto one. Equation 1 operationalizes mentioneddefinition.
Bþ i; kð Þ ¼XJ�1
j¼1
XJ�j
u¼1
xijðkÞxijþu
ðkÞPjjþu
8k ¼ 1; 2; . . . ;K; 8 i ¼ 1; 2; . . . ; I
ð1Þ
B. Operator i’s functional boredom during theplanning horizon—BþðiÞ—is equal to the mini-mum of operator i’s functional boredom during allperiods included in the planning horizon as statedin Eq. 2.
A. Operator i’s dysfunctional boredom in periodk—B� i; kð Þ—is calculated based on the similarityof jobs assigned to operator i from period k �DORþ 1 to period k. This boredom is unfavor-able because the operator feels repetition throughperforming similar jobs during DOR periods. As
explained before, this is caused by internalinterruption. Therefore, we formulate it as Eq. 3.
B� i; kð Þ ¼Xmin k�1;DOR�1f g
t¼1
XJj¼1
XJ�j
u¼0
xijðkÞxijþu
k�tð ÞPjjþu
8k ¼ 1; 2; :::;K 8 i ¼ 1; 2; :::; I
ð3Þ
Thus, to calculate the dysfunctional boredomfor each operator in period k, the range ofseveral successive periods must be included asfollows:
If k � DOR ) periods in the range : k � DORþ 1;k � DOR; :::; k
Otherwise periods in the range : 1; 2; :::; k
B. Operator i’s dysfunctional boredom during theplanning horizon—B�ðiÞ—is equal to the maxi-mum of operator i’s dysfunctional boredom duringall periods included in the planning horizon asstated in Eq. 4.
B�ðiÞ ¼ Maxk¼1;2;:::;K B� i; kð Þf g 8i ¼ 1; 2; :::; I
ð4Þ
Definition (4) Operator’s total boredom (B(i)): is the totalboredom felt by each operator during theplanning horizon. It is calculated byextracting operator’s functional boredomfrom daily average of operator’s dysfunctionalboredom during the planning horizon, whichcan be presented as (Eq. 5):
BðiÞ ¼ B�ðiÞDOR
� BþðiÞ
8k ¼ 1; 2; :::;K 8i ¼ 1; 2; :::; I
ð5Þ
If BðiÞ � 0, no boredom costs will becalculated in the model.
3.3 The proposed model
Here, assumptions and definitions presented in the previoussubsections are applied to develop the multi-period imbal-ance assignment structure formulating JRSP as followingEqs. 6–12. The objective function of the model Eq. 6includes two expressions. The first one is the cost ofassignments or workforce costs and the second one is the
Int J Adv Manuf Technol
cost of total boredom felt by operators during the planninghorizon due to assigning similar jobs.
zi ¼ 0; 1 8i ¼ 1; 2:::; I 8j ¼ 1; 2:::; J 8k ¼ 1; 2:::;K ð10Þ
1� zið ÞM þ BðiÞ � 0 8i ¼ 1; 2:::; I ð11Þ
�ziM þ BðiÞ � 0 8i ¼ 1; 2:::; I ð12Þ
Equation 7 is expressed in accordance with the assump-tion (2) and non-equation (8) directly satisfies the assump-tion (1). Equations 9 and 10 explain that the model isformulated by integer (binary) variables. Equations 11 and12 operationalize the calculating of boredom cost for thepositive values of B(i).
4 Model applicability and validation
In this section, first, we discuss some applications of themodel in the industrial settings, and then the model isvalidated by solving some sample test problems.
4.1 Application in the industrial settings
With regard to the application of proposed model, we prefer topresent two industrial settings by which the idea to constructsuch a model originated. However, it is necessary to note thatits application is not restricted to these cases. The authorsexperienced the problem for the first time in an engineeringdiscipline of one consulting company. The head was to assignpreparing and reviewing of detail engineering documents anddrawings to the fellow engineers. The number of tasks wasgenerally much greater than that of engineers due to variety ofengineering works defined in different projects of company.So, an engineer may be assigned to one or often more tasks a
day. The head was to assign tasks so that any engineer’sconcentration during a day not be interrupted by working onto some extent different (unsimilar) tasks such as preparing adatasheet and commenting on a single line diagram. It must benoted that maintaining concentration of engineers is one of themain concerns in such companies. On the other hand, the headwas to keep the assignment variety for each engineer all weeklong to prevent him (her) from feeling boredom that wouldlead to noncompensable engineering mistakes as well asinfeasible man hours. For the setting simply explained above,there is no guiding instruction in the industry for the head todeal with a satisfactory plan. The second case refers toauthors’ experience in a switchboard manufacturing company.The production manager is required to rotate workersthorough the overall production process to enhance companyflexibility forced by making-to-order strategy of the company.Thus, the manager is tasked to assign a group of workers to themechanical department and another to the electrical depart-ment every week, which supports performing similar tasks,rotating each worker in each department during a week. Forthe following week, the manager should plan to assign eachgroup of workers to a different department, which supportsperforming unsimilar tasks. Tasks within each department arenot necessarily similar. For instance, in the electrical depart-ment some tasks are performed inside the electrical cell andsome done outside on the tray. Manager should considersimilarities because of the serious ergonomic risks (disorders)in exposure to similar tasks, particularly in electrical depart-ment. Production manager so far applied his rule-of-thumband needs to have a clear model to help him to make properdecisions on every month production plans.
4.2 Model validation
Table 2 includes the characteristics of eight randomlyproduced small-size problems used as samples to evaluatethe validity of the model presented in this article. To do that,we applied Lingo optimization software addressed by WayneL. Winston [37]. This software finds the local or globalsolutions to non linear integer problems making use of branchand bound approach. Hence, many authors applied it to solvesuch problems, for instance Kokangul and Susuz [19]. It isnecessary to note that among the sample problems in ourgeneral sample bank, those solved by Lingo with localoptimum solution have been selected. The size of sampleproblems in Table 2, which reflects the number of feasiblesolutions to each problem, is calculated by using occupationtheory and permutation with repetition rule.
To check and verify the solutions calculated thorough thisarticle, finding a lower bound (LB) for the model is useful.Therefore, we consider the objective function as two parts.The part addressing the total boredom cost in the best situationwill be equal to zero regardless of being feasible and the other
Int J Adv Manuf Technol
part calculating the total workforce cost will be minimized byassigning the operator to the job finding the least cost in therelated column of the job in the cost matrix, cmj, regardless ofbeing feasible too. Mathematically speaking, we have
LB ¼XKk¼1
XJj¼1
cðkÞmj ð13Þ
In which cmj, the minimal cost for performing the job j inthe period k, is calculated as follows:
cðkÞmj ¼ Mini¼1;2;:::;I
cðkÞij 8j ¼ 1; 2; :::; J 8k ¼ 1; 2; :::;K ð14Þ
Table 3 summarizes Lingo software outputs:
The particular case in which cð1Þij ¼ cð2Þij ¼ :::: ¼ cðkÞij ;
8i ¼ 1; 2; :::; I 8j ¼ 1; 2; :::; J , results in
LB ¼ KXJj¼1
cmj ð15Þ
The right most column of Table 3 gives lower boundscalculated by using CI×J matrices in Table 2, Eqs. 14 and
15. For instance, the lower bound of sample problem no.8 is calculated as follows0:0
4� 58þ 110þ 124þ 134þ 154þ 162ð Þ ¼ 2; 968 ð16Þ
Table 2 Given data of sample problems to test the model validity
Table 3 Objective function value and computation time by Lingo forsample problems
Sample no. Local optimum Computation Lower boundZ ($) Time (s)
1 163.25 00:00:02 135
2 208.65 00:00:40 160
3 319.53 00:00:14 160
4 647.05 00:02:11 360
5 741.48 00:02:25 360
6 2,447.05 00:01:15 2,193
7 2,763.25 00:34:31 2,226
8 4,215.07 00:15:12 2,968
Int J Adv Manuf Technol
5 Proposed algorithms
JRSP developed in this article is an integer-nonlinearmodel, classified as NP-Hard according to Sekiner andKurt [30] and Bhadury and Radovilsky [6]. Because of itscombinatorial nature, it is impossible to solve it in areasonable time by classical mathematical programmingapproaches. So, to conquer the algorithmic complexity ofthe model and obtain near-optimal solutions in a reasonabletime, we designed genetic and ICAs, which are known asmetaheuristics or search algorithms.
5.1 Designing of genetic algorithm
As Glover and Kochenberger [16] reported, the successfulapplication of GAs to combinatorial optimization problemshas grown almost exponentially. Unlike the earlier evolu-tionary algorithms, which could be considered as simpledevelopments of hill-climbing methods, instead of search-ing from point to point as in neighbor search approaches,Holland’s GA reproduces the whole set of chromosome inorder to generate a new population. The recombination isdone using genetic operators, crossover, and mutation [16].The pseudo-code of GA developed to solve JRSP ispresented in Fig. 1. p(t) and c(t) represent parents andoffspring, respectively. In the rest of this section, geneticpresentation and operators will be discussed.
5.1.1 Solution representation scheme
Encoding procedure turns each point in the feasible spaceto a string called chromosome. The chromosome represent-ing the JRSP is a J×K matrix of integer numbers between 1and I generated randomly. The feasibility of each solution isreflected in its relevant chromosome by assigning each ofinteger numbers between 1 and I, namely I operators, at
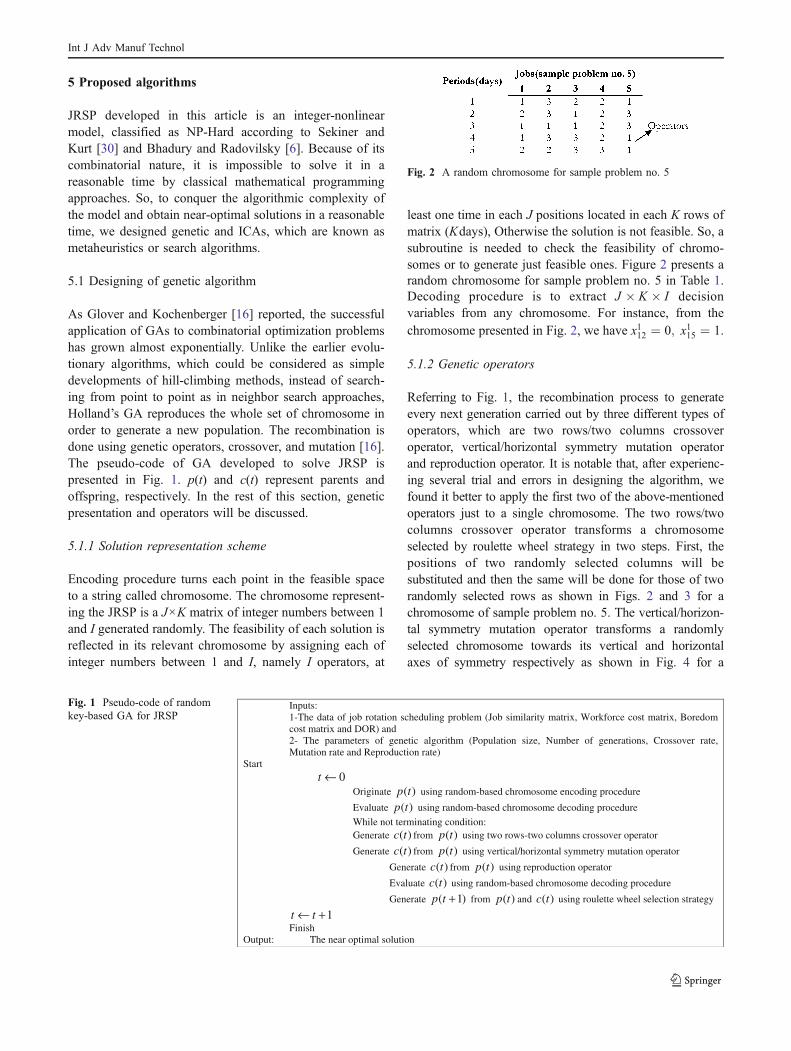
least one time in each J positions located in each K rows ofmatrix (Kdays), Otherwise the solution is not feasible. So, asubroutine is needed to check the feasibility of chromo-somes or to generate just feasible ones. Figure 2 presents arandom chromosome for sample problem no. 5 in Table 1.Decoding procedure is to extract J � K � I decisionvariables from any chromosome. For instance, from thechromosome presented in Fig. 2, we have x112 ¼ 0; x115 ¼ 1.
5.1.2 Genetic operators
Referring to Fig. 1, the recombination process to generateevery next generation carried out by three different types ofoperators, which are two rows/two columns crossoveroperator, vertical/horizontal symmetry mutation operatorand reproduction operator. It is notable that, after experienc-ing several trial and errors in designing the algorithm, wefound it better to apply the first two of the above-mentionedoperators just to a single chromosome. The two rows/twocolumns crossover operator transforms a chromosomeselected by roulette wheel strategy in two steps. First, thepositions of two randomly selected columns will besubstituted and then the same will be done for those of tworandomly selected rows as shown in Figs. 2 and 3 for achromosome of sample problem no. 5. The vertical/horizon-tal symmetry mutation operator transforms a randomlyselected chromosome towards its vertical and horizontalaxes of symmetry respectively as shown in Fig. 4 for a
Inputs:1-The data of job rotation scheduling problem (Job similarity matrix, Workforce cost matrix, Boredom cost matrix and DOR) and2- The parameters of genetic algorithm (Population size, Number of generations, Crossover rate, Mutation rate and Reproduction rate)
Start0←t
Originate )(tp using random-based chromosome encoding procedure
Evaluate )(tp using random-based chromosome decoding procedure
While not terminating condition:Generate )(tc from )(tp using two rows-two columns crossover operator
Generate )(tc from )(tp using vertical/horizontal symmetry mutation operator
Generate )(tc from )(tp using reproduction operator
Evaluate )(tc using random-based chromosome decoding procedure
Generate )1( +tp from )(tp and )(tc using roulette wheel selection strategy
1+← ttFinish
Output: The near optimal solution
Fig. 1 Pseudo-code of randomkey-based GA for JRSP
Fig. 2 A random chromosome for sample problem no. 5
Int J Adv Manuf Technol
random chromosome of sample problem no. 5. The bestchromosomes (based on fitness function) in each generationwill be conveyed to the next generation by reproductionoperator in order to mitigate the risk of missing goodchromosomes through crossover or mutation.
5.2 Designing of imperialist competitive algorithm
Atashpaz-Gargari and Lucas [3] originated a novel globalsearch heuristics, ICA, which inspired by socio-politicalprocess. ICA can be thought of as a social counterpart ofGA. Since, GA simulates biological evolution and ICAdoes the same for social evolution. The algorithm beginswith an initial population consisting of individuals calledcountry. Countries play a role either as a colony or as animperialist and all together form some empires. In general,the colonies to be dominated are directly related to therelative strength of imperialist. At the core of thisalgorithm, there are two processes, assimilation policy andimperialistic competition. Assimilation policy refers tomaking colonies of an imperialist to become more similarto it. This process executed regarding predetermined linearequation in the algorithm and could lead to colony andimperialist displacement whenever the colony achievesbetter position comparing the imperialist. Assimilation is acounterpart for crossover and possible deviations alongwith it is a counterpart for mutation. The main advantage ofICA is the mechanism to make colonies the same as itsimperialist, which means getting close to the better solutionthrough several channels. This mechanism could beadjusted by changing the number of imperialists andassimilation procedure. During imperialistic competition,weak empires collapse and powerful ones take possession
of their colonies. Imperialistic competition hopefully con-verges to a state in which there exists only one empire andits colonies are in the same position and have the same costas the imperialist [3]. Therefore, generally ICA convergesto better solutions comparing GA. However, ICA continuesto obtain the better solutions through deviation andassimilation processes after establishing the grandempire. Recently, studies in the field of productionmanagement reported satisfactory results applying thisalgorithm in terms of efficiency and quality of solutionobtained [5, 14, 18, 24, 31]. These studies predominantlymodified ICA to be applied for discrete solution spaces.The pseudo code of developed ICA for solving JRSP,presented in Fig. 5. Figure 6 illustrates the assimilationpolicy employed in our algorithm. The population used forICA is the same as GA, which has been explained ingenetic presentation subsection.
We have shown that applying a percentage ofcolonies to be involved in assimilation process resultsin more efficiency while getting the same quality ofsolutions. We found that if ICA continues up to thetime in which full assimilation thorough the grandempire happens, the quality of solutions obtained willbe efficiently improved. So, we have not terminatedthis algorithm whenever it was that the grand empireestablished. Instead, the termination time set to the timethe GA terminated its operations in order to performbetter comparison between two algorithms regarding thequality of their solutions. Another innovation indesigning ICA in our work is changing the assimilationprocess after establishing the grand empire. It is similarwith adjusting dynamic and intelligent operators forGA.
Fig. 3 Generating an offspringfrom a random chromosome forsample problem no. 5 bycrossover operator
Fig. 4 Generating a mutatedoffspring from a randomchromosome for sampleproblem no. 5
Int J Adv Manuf Technol
5.3 Taguchi’s design of experiments approach to adjustthe parameters of algorithms
In Taguchi’s quality engineering philosophy, he called forcontinually reduction in variations around target valueinstead of hitting the target first to maximize the robustness,which is defined as being immune to the influences ofuncontrolled factors. To do this, he developed his approachto design of experiments by constructing a special set oforthogonal arrays (OAs) by applying the same principles asthose of factorial design with a smaller number of experi-ments, which are more informative. He introduced thesignal-to-noise (S/N) ratio to express the response ofprocess in terms of mean square deviation and to calculatethe scatter around a target value [27, 32]. It serves to
maximize robustness by selecting the level of controlfactors giving the largest S/N ratio where noise factors arecompounded into one. The equation below gives the S/Nratio for “the-smallest-the-better” characteristic whichemployed in our design of experiments.
S
NðiÞ ¼ �10 log
1
n
Xj
Yij2
!ð17Þ
The above equation calculates S/N ratio of the ithexperiment ran n times j is an index for runs and Yijrepresents the result of experiment i in the jth run.
Before starting to adjust the parameters of algorithms, theparameters having determinant effect on the output ofalgorithms as well as their relevant levels must be determined
Inputs:1-Initial population2- Colonies3- The parameters of assimilation policy(Deviation rate during assimilation process- before establishing grand empire, Deviation rate during assimilation process- after establishing grand empire)Start
Select predetermined percent of colonies, randomly. Overwrite some randomly selected rows of selected colonies with those of relevant imperialist (transforming colonies into assimilated ones). Select predetermined percent of assimilated colonies, randomly.Select one of these bellows deviation strategies, randomly
*Substitute assimilated colony to its vertically symmetric counterpart*Overwrite one randomly selected row of colony with randomly generated feasible numbers
FinishOutput: Colonies assimilated into empire
Fig. 6 Assimilation policy employed in imperialist competitive algorithm for JRSP
Inputs:1-The data of job rotation scheduling problem (Job similarity matrix, Workforce cost matrix, Boredom costmatrix and DOR) and2- The parameters of imperialist competitive algorithm (Number of colonies, Number of initial empires, Deviation rate during assimilation process- before establishing grand empire, Deviation rate during assimilation process- after establishing grand empireStart
Originate initial population randomlyEstablishing initial empires randomlyWhile establishing the grand empire
Assimilation process in each empireImperialistic competition among empires
While full assimilation thorough the grand empireAssimilation process in each empire
FinishOutput: The near optimal solution
Fig. 5 Pseudo code of imperialist competitive algorithm for JRSP
Int J Adv Manuf Technol
as shown in Tables 4 and 5 for ICA and GA, respectively.Our Taguchi’s parameter adjustment process includes,selecting the appropriate design of orthogonal array, assign-ing factors to columns, carrying out trials on the testproblems and analysis, which is briefly explained below.
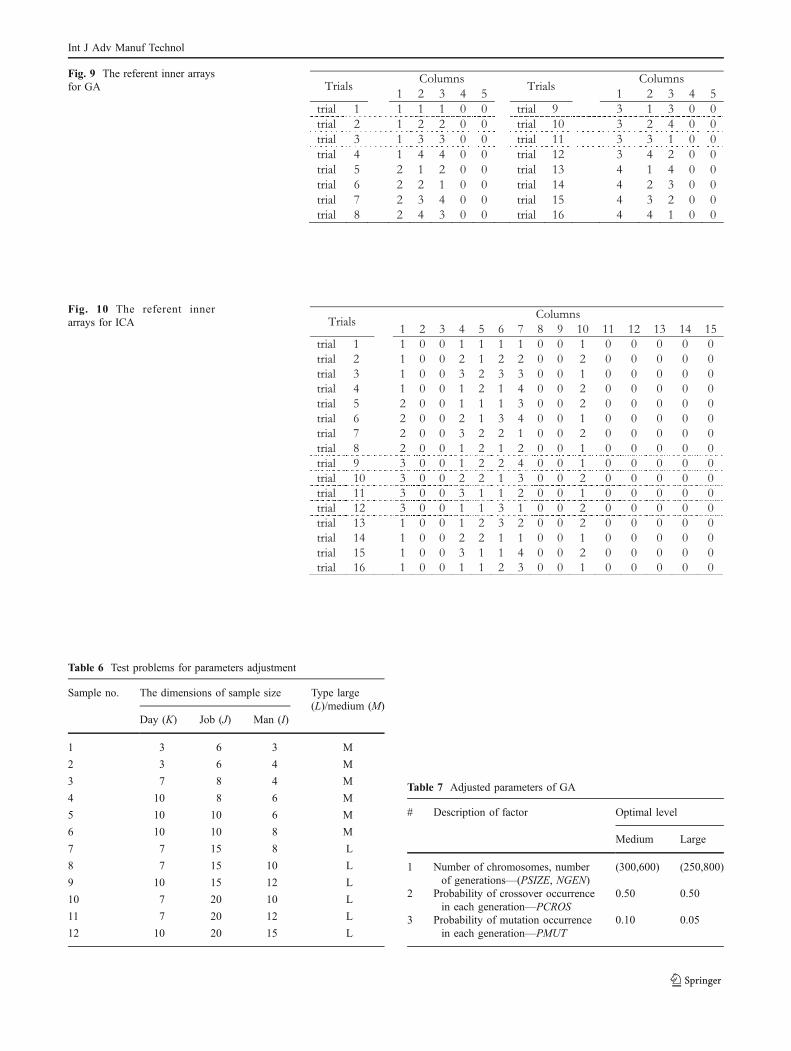
In the first and second steps, since the smallest four levelOA is L16 which has five four level factors, this design willbe matched to our GA, leaving the fourth and fifth columnsunused (Fig. 7). Among the mixed level designs, there is noappropriate design including four-, three-, and two-levelfactors together, so we applied two-level L16 with 15columns and upgraded nine columns to be matched to ourICA as shown in Fig. 8. The referent inner arrays afterrequired modifications are presented in Figs. 9 and 10.
Table 6 includes the characteristics of 12 randomlyproduced medium and large size problems used to run thetrials for adjusting the parameters of algorithms. Weclassified our test problems to medium and large sizes todetect and control any probable difference in value ofparameters due to characteristic changes. We realized thatthe number of jobs is the key determinant of algorithmiccomplexity and classified the problem with less than tenjobs as medium (M) and more than of that as large (L) one.
We did 1,536 runs—16 (number of trials in L16orthogonalarray design)×12 (number of test problems)×4 (frequenciesfor doing each trial)×2 (number of algorithms)—of ourdeveloped genetic and ICAs in Matlab 2008 environment ontwo Pentium IV 2.2 GHZ (1 GIG RAM) computers andrecorded the results for each test problem separately. Theresults were entered as inputs to the Qualitek-4 (QT4)software, which is developed by Nutek and addressed byRanjit [27] for design and analysis of Taguchi’s experiments.Tables 7 and 8 give the results of analyses done by QT4.
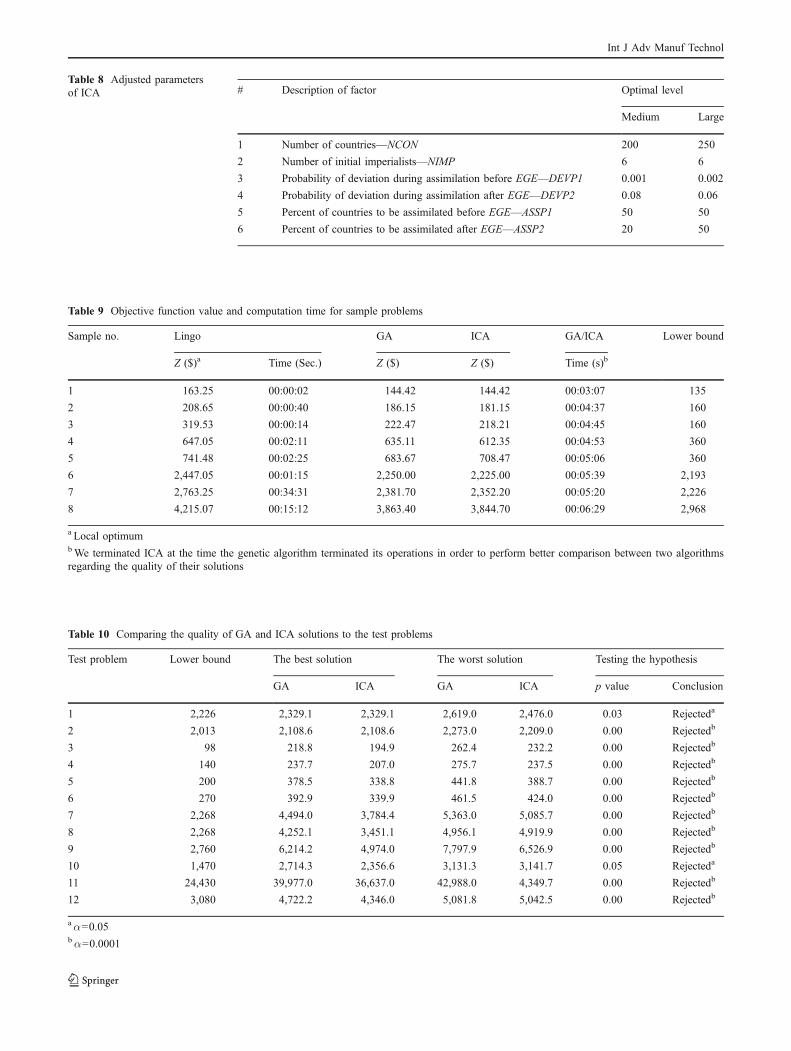
6 Computational results
The computation results of our developed GA and ICA foreight sample problems of Table 2 are summarized in Table 9.Comparing the results it can be concluded that the quality ofICA solutions are better than GA for all sample problemsand those of GA are better than Lingo solutions as well.
To have further comparisons between two developedalgorithms, we made use of our data bank including 1,536results of computations generated during carrying out trials on12 test problems. The null hypothesis, H0, “the mean of twoalgorithms are equal” was tested against the alternate, Ha, “themean of GA are greater than that of ICA” for each of testproblems. The results of analysis done by MINITAB 15.1using “two-sample Mann–Whitney U test”, shown in the rightmost column of Table 10, lead us to the decisive rejection ofthe null hypothesis. Therefore, we can conclude that the qualityof ICA is better than that of GA for our proposed JRSP.
a Local optimumbWe terminated ICA at the time the genetic algorithm terminated its operations in order to perform better comparison between two algorithmsregarding the quality of their solutions
Table 10 Comparing the quality of GA and ICA solutions to the test problems
Test problem Lower bound The best solution The worst solution Testing the hypothesis
Several convergence curves that show the perfor-mance of developed algorithms versus time, for sometest problems of Table 6 are presented in Figs. 11, 12, 13,and 14.
Considering Figs. 11, 12, 13, and 14, simply supportslabeling samples 7–12 as large problems. According to thesefigures, the algorithms ran for relatively long computationtimes. For instance, about 2,500 s has been spent for sampleno. 12. We can also conclude that
1. ICA continues the decreasing trend during itscomputation time, while GA continues like ahorizontal line during a major percentage of itscomputation time (50 to 85%), which means gainingno improvement.
2. The greater size of the problem results in the betterperformance (in terms of continuing decreasingly) foreach algorithm.
7 Conclusions and future research
In this article, we found the matter addressed by Bhaduryand Radovilsky [6] as a critical issue to make job rotationmore beneficial to improve employee’s performance.Motivated by moving from simplistic rules for rotatingjobs to more creative ones, the concept of boredom wasdeveloped and the similarity of jobs assigned, considered asthe source of boredom. Furthermore, the favorable similar-ity required to concentrate on an assigned task wasdifferentiated from unfavorable similarity due to repetitionthrough performing similar jobs. The model to cover theseconcepts structured as an integer-nonlinear multi-periodmodel. Thus, efficient GA and ICA designed to conquer itsalgorithmic complexity. The better quality of ICA compar-ing with that of GA shown in this article would encourageother researchers to apply it in their optimization efforts, atleast in the case of optimizing multi-period assignment
Fig. 11 Convergence curve of ICA and GA for test problem no. 8 Fig. 13 Convergence curve of ICA and GA for test problem no. 10
Fig. 12 Convergence curve of ICA and GA for test problem no. 9 Fig. 14 Convergence curve of ICA and GA for test problem no. 12
Int J Adv Manuf Technol
models, which have variety of real applications. Redefiningthe concepts presented in this article such as jobs similarity,cost of boredom, and so forth would increase theapplicability of model in real settings.
One of the limitations of this article is the mere focus oncosts while other objectives which are not necessarily stated interms of costs such as leveling the workload of operators, andso on could be considered. So developing the model presentedin this article to multi-objective one could be the generalguideline for the future researches. Relaxing some assumptions,especially one to have no limitation of working time in eachperiod, could be applied to link job rotation scheduling and tourscheduling problems, which help managers to decide on dailyshifts, overtimes as well as rotating jobs. Entering the effects ofboredom on standard times employing learning curves in themodel, make the workforce cost more real and feasibility ofscheduling subject to working time and due dates, consideredmore exactly. Since other researchers reported acceptableresults applying ACO and SA with respect to solve JRSPefficiently, developing this algorithms to solve the modelssimilar to the model presented in this article could be useful.
References
1. Allwood JM, Lee WL (2004) The impact of job rotation onproblem solving skills. Int J Prod Res 42(5):865–881
3. Atashpaz-Gargari E, Lucas C (2007) “Imperialist competitivealgorithm: an algorithm for optimization inspired by imperialisticcompetition”. In: IEEE Congress on Evolutionary Computation(CEC 2007): pp 4661–4667
4. Azizi N, Zolfaghari S, Liang M (2010) Modeling job rotation inmanufacturing systems: The study of employee’s boredom andskill variations. Int J Prod Econ 123:69–85
5. Bagher M, Zandieh M, Farsijani H (2010) Balancing of stochasticU-type assembly lines: an imperialist competitive algorithm. Int JAdv Manuf Technol. doi:10.1007/s00170-010-2937-3
6. Bhadury J, Radovilsky Z (2006) Job rotation using the multi-period assignment model. Int J Prod Res 44(20):4431–4444
7. Burke L, Moore JE (2000) The reverberating effects of jobrotation: a theoretical exploration of nonrotaters’ fairness percep-tions”. Hum Resour Manag Rev 10(2):127–152
8. Carnahan BJ, Redfern MS, Norman B (2000) Designing safe jobrotation schedules using optimization and heuristic search.Ergonomics 43(4):543–560
9. Corominas A, Olivella J, Pastor R (2010) A model for theassignment of a set of tasks when work performance depends onexperience of all tasks involved. Int J Prod Econ 126:335–340
10. Desai D, Carnahan B, Davis J, Maghsoodloo S (2005)Development and validation of an ergonomic job rotationschedule at a manufacturing facility. IIE annual conferenceproceedings, Norcross: p. 1
11. Drago R, Garvey GT (1998) Incentives for helping on the job:theory and Evidence. J Labor Econ 16(1):1–25
12. Eriksson T, Ortega J (2006) The adoption of job rotation: testingthe theories. Ind Labor Relat Rev 59(4):653–666
13. Fisher CD (1998) Effects of external and internal interruptions onboredom at work: two studies. J Organ Behav 19:503–522
14. Forouharfard S, Zandieh M (2010) An imperialist competitivealgorithm to schedule of receiving and shipping trucks in cross-docking systems. Int J Adv Manuf Technol 51(9–12):1179–1193
15. Hsieh A, Chao H (2004) A reassessment of the relationshipbetween job specialization, job rotation, and job burnout: exampleof Taiwan’s high-technology industry. Int J Human Resour Manag15(6):1108–1123
16. Glover F, Kochenberger GA (2003) Handbook of metaheuristics.Kluwer Academic Publisher, Boston, pp 55–82
17. Griffin RW (2006) Management. Houghton Mifflin, Boston18. Karimi N, Zandieh M (2010) Group scheduling in flexible flow
shops: a hybridised approach of imperialist competitive algorithmand electromagnetic-like mechanism. Int J Prod Res 49:4965–4977
19. Kokangul A, Susuz Z (2009) Integrated analytical hierarchprocess and mathematical programming to supplier selectionproblem with quantity discount. Appl Math Model 33:1417–1429
20. Lincoln JR, Kalleberg AL (1990) Culture, control, and commitment.Cambridge University Press, New York
21. Lodree JEJ, Geiger CD, Jiang X (2009) Taxonomy for integratingscheduling theory and human factors: review and researchopportunities. Int J Ind Ergon 39:39–51
22. Loukidou L, Loan-Clarke J, Daniels K (2009) Boredom in theworkplace: more than monotonous tasks. Int J Manag Rev 11(4):381–405
23. Malhotra R, Lalitha CS, Gupta P, Mehra A (2007) Combinatorialoptimization: some aspects. Narosa Publishing House, New Delhi
24. Nazari-Shirkouhi S, Eivazy H, Ghodsi R, Rezaie K, Atashpaz-Gargari E (2010) Solving the integrated product mix-outsourcingproblem by a novel meta-heuristic algorithm: imperialist competitivealgorithm. Expert Syst Appl 37(12):7615–7626
25. Nembhard DA, Norman BA (2006) “Cross-training in productionsystems with human learning and forgetting”, chapter 16. In:Badiru AB (ed) Handbook of industrial and systems engineering.CRC Press, New York, pp 1–13
26. Paul P, Kuijer FM, Visser B, Kemper HCG (1999) Job rotation asa factor in reducing physical workload at a refuse collectingdepartment. Ergonomics 42(9):1167–1178
27. Ranjit R (1990) A primer on the Taguchi method, 1st edn. VanNostard Reinhold, USA
28. Sekiner SU, Kurt M (2007) A simulated annealing approach to thesolution of job rotation scheduling problems. Appl Math Comput188:31–45
29. Sekiguch T (2006) How organizations promote person-environmentfit: using the case of Japanese firms to illustrate institutional andcultural influences. Asia Pacific J Manage 23:47–69
30. Sekiner SU, Kurt M (2008) Ant colony optimization for the jobrotation scheduling problem. Appl Math Comput 201:149–160
31. Shokrollahpour E, Zandieh M, Dorri B (2010) A novel imperialistcompetitive algorithm for bi-criteria scheduling of the assemblyflow shop problem. Int J Prod Res 49(11):3087–3103
32. Taguchi G, Wu Y, Chowdhury S (2004) Taguchi’s qualityengineering handbook. Wiley, Hoboken
33. Tharmmaphornphilas W, Norman B (2004) A quantitative method fordetermining proper job rotation intervals. Ann Oper Res 128:251–266
34. Tharmmaphornphilas W, Norman B (2007) A methodology tocreate robust job rotation schedules. Ann Oper Res 155:339–360
35. Vodanovich S (2003) Psychometrics measure of boredom: areview of the literature. J Psychol 137(6):569–595