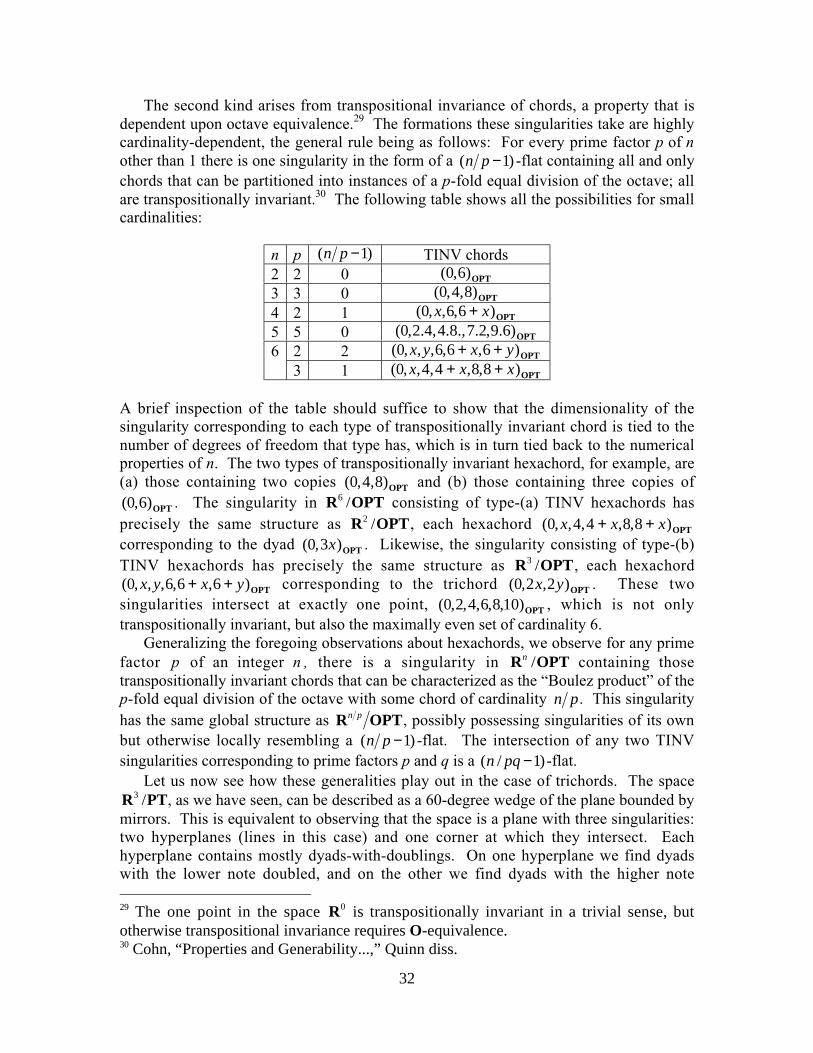
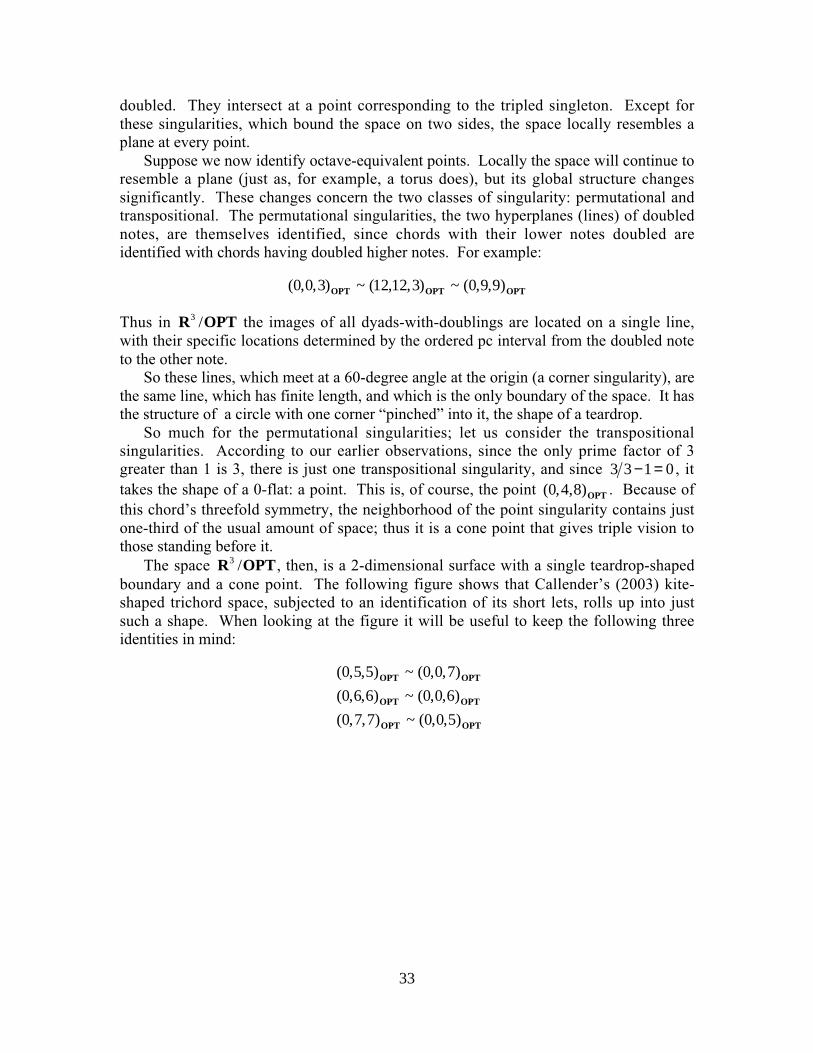
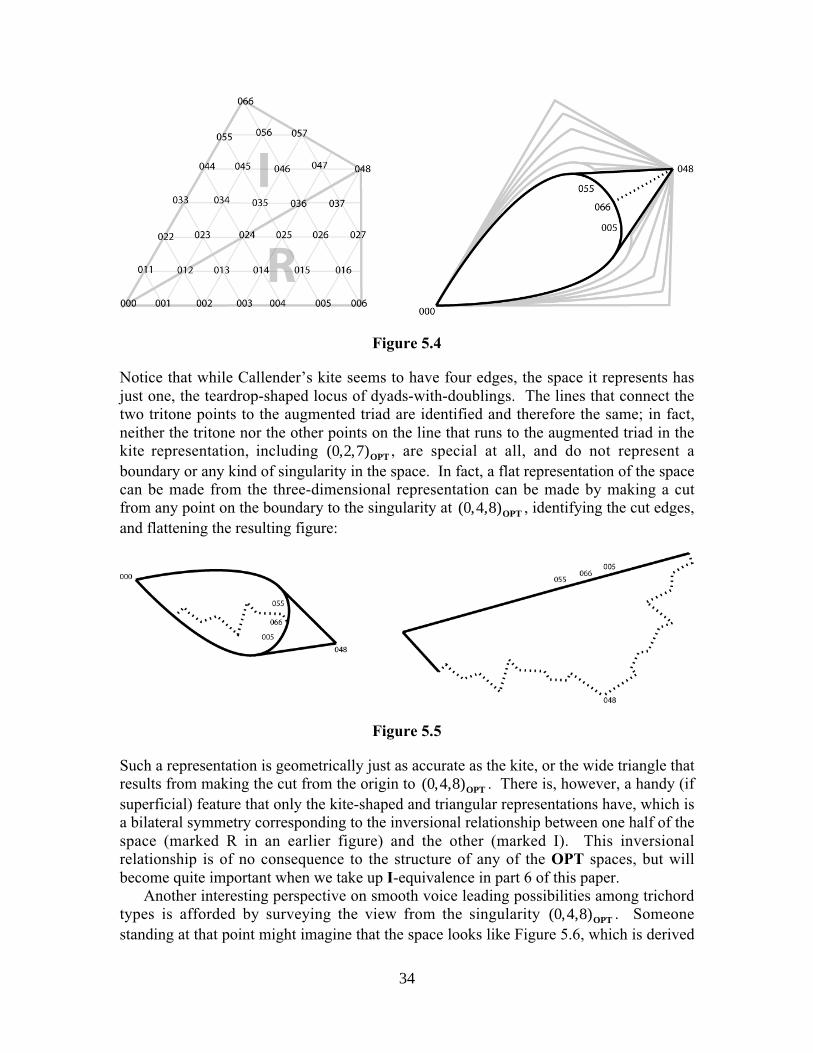
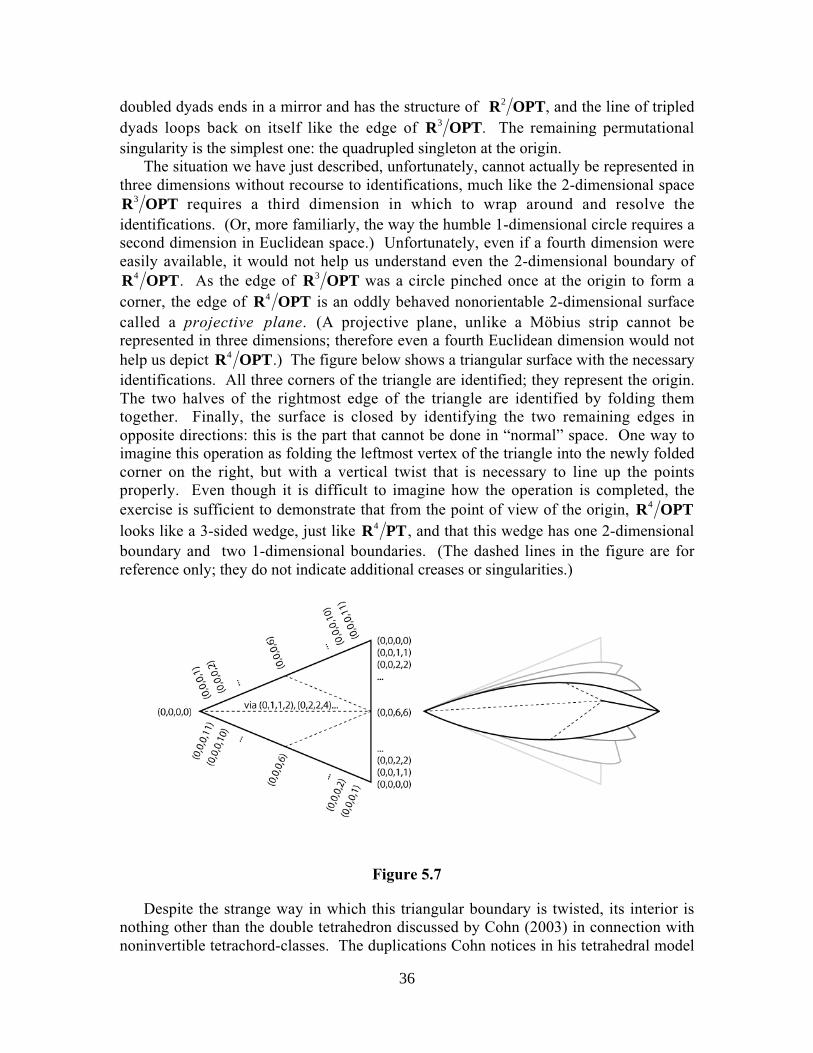
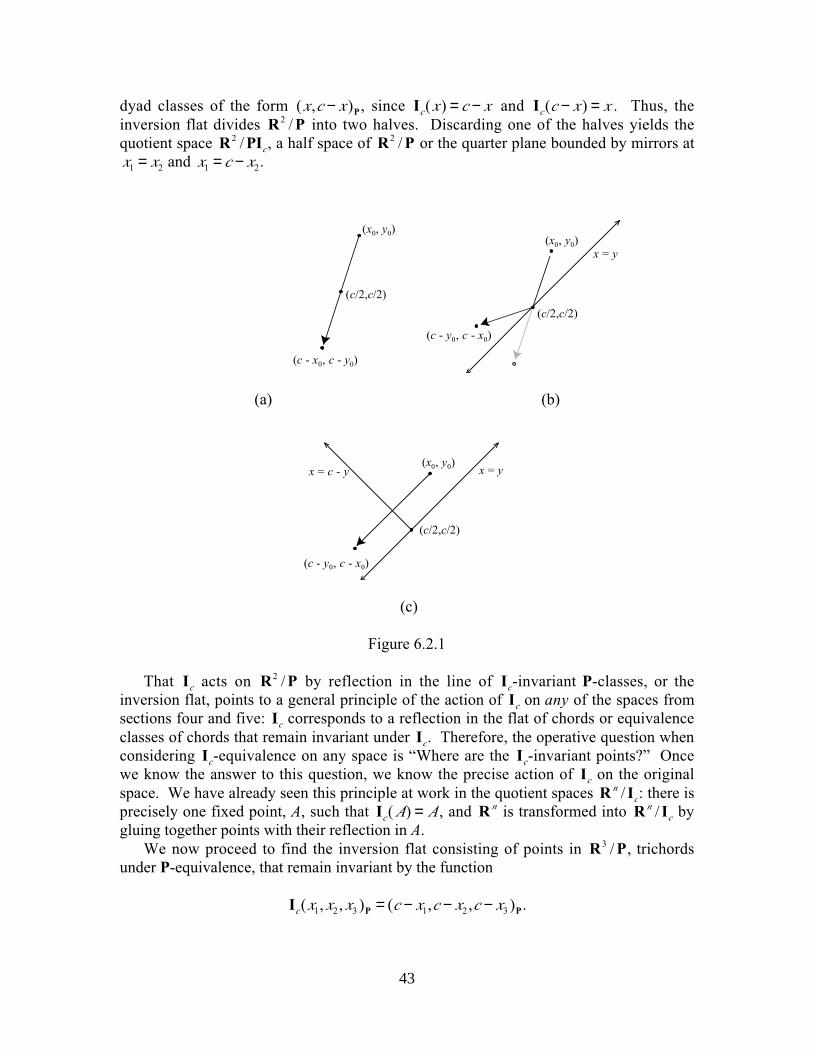
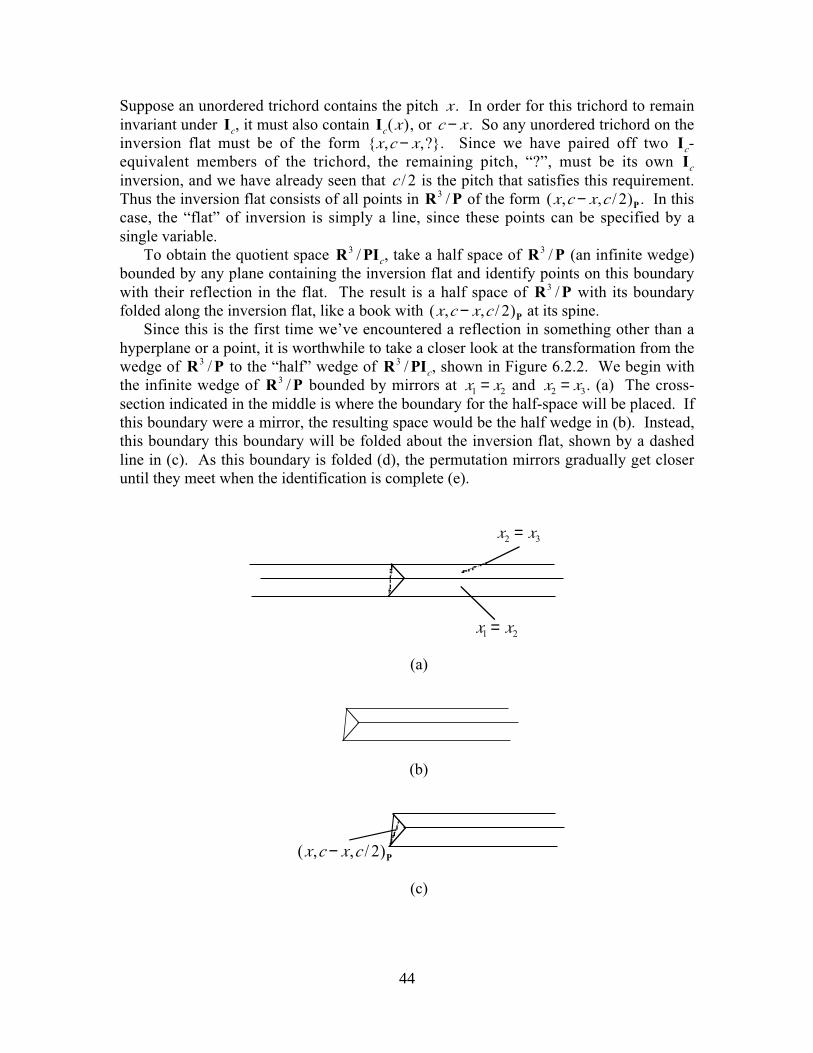
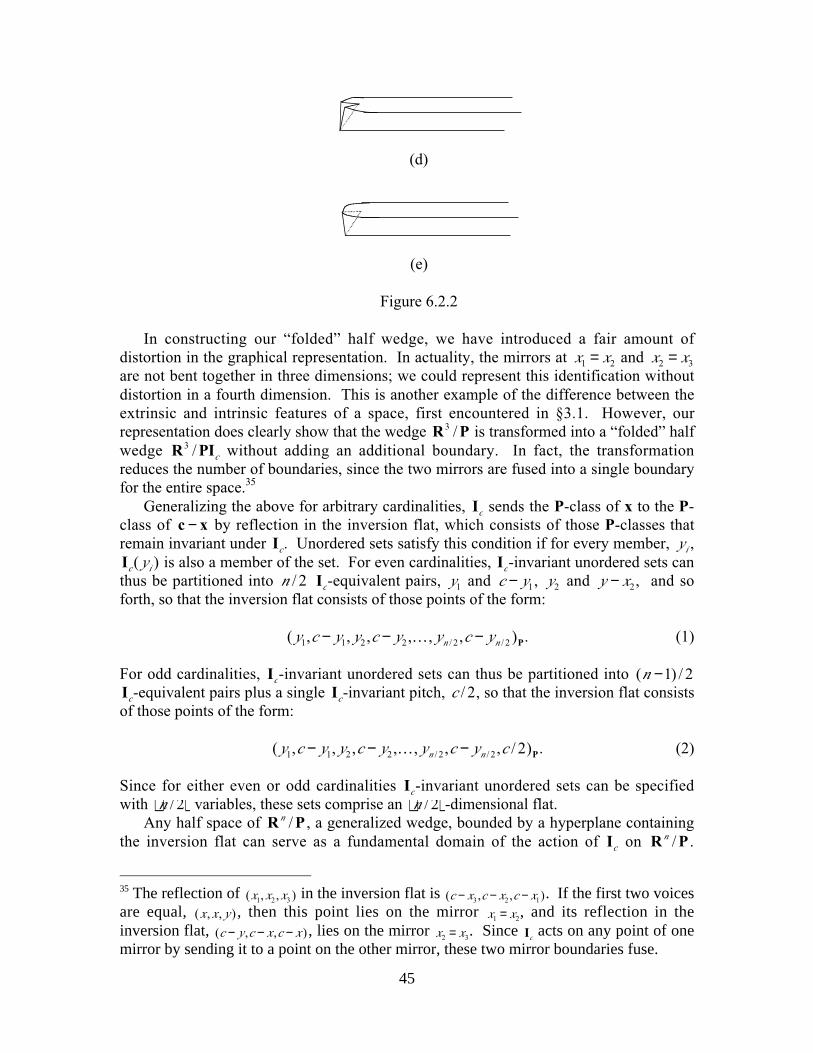
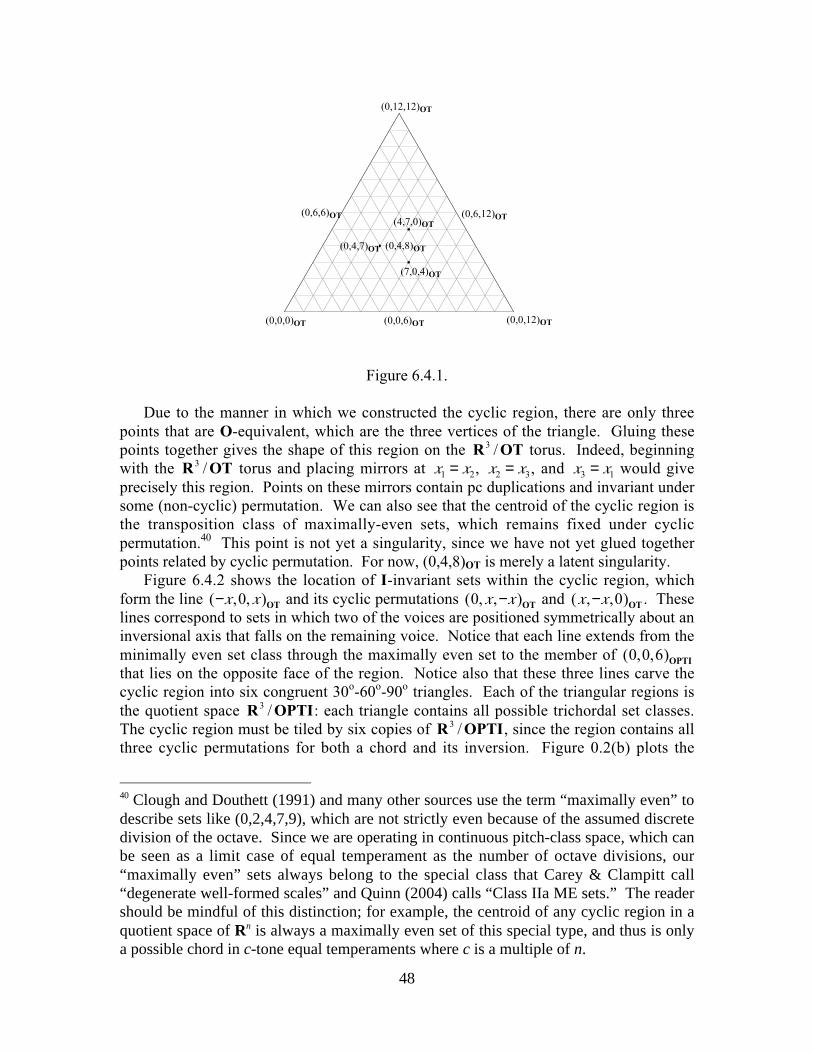
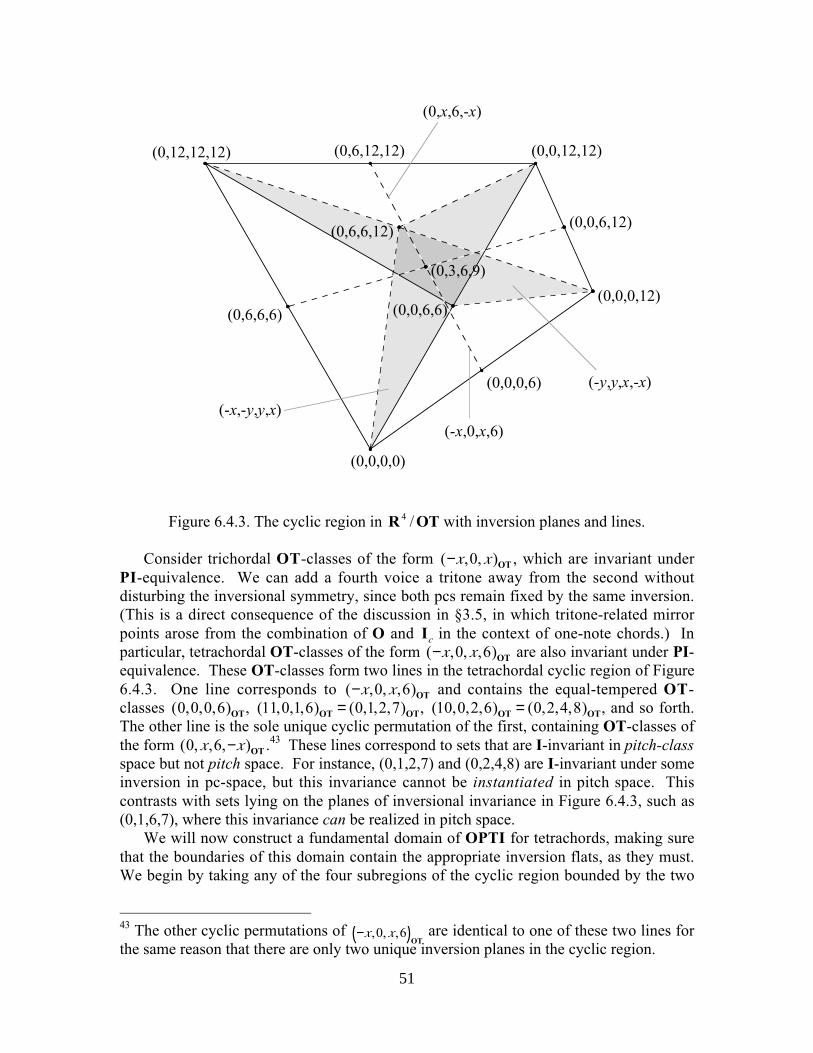
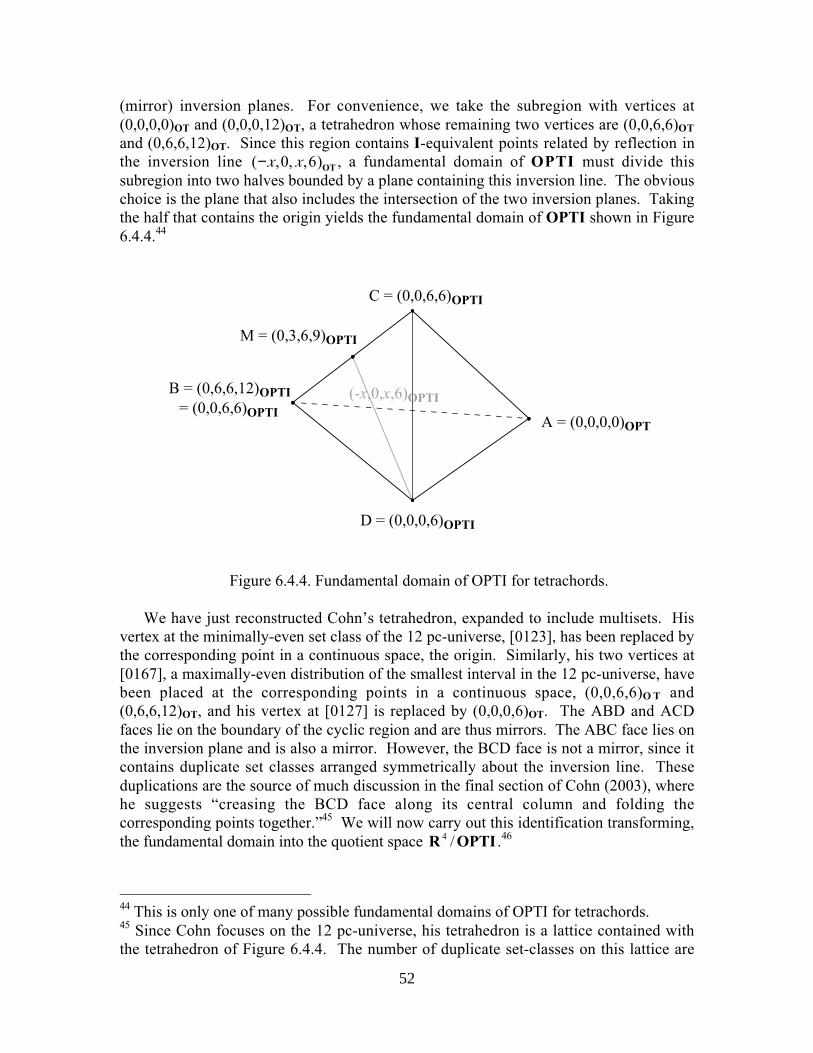
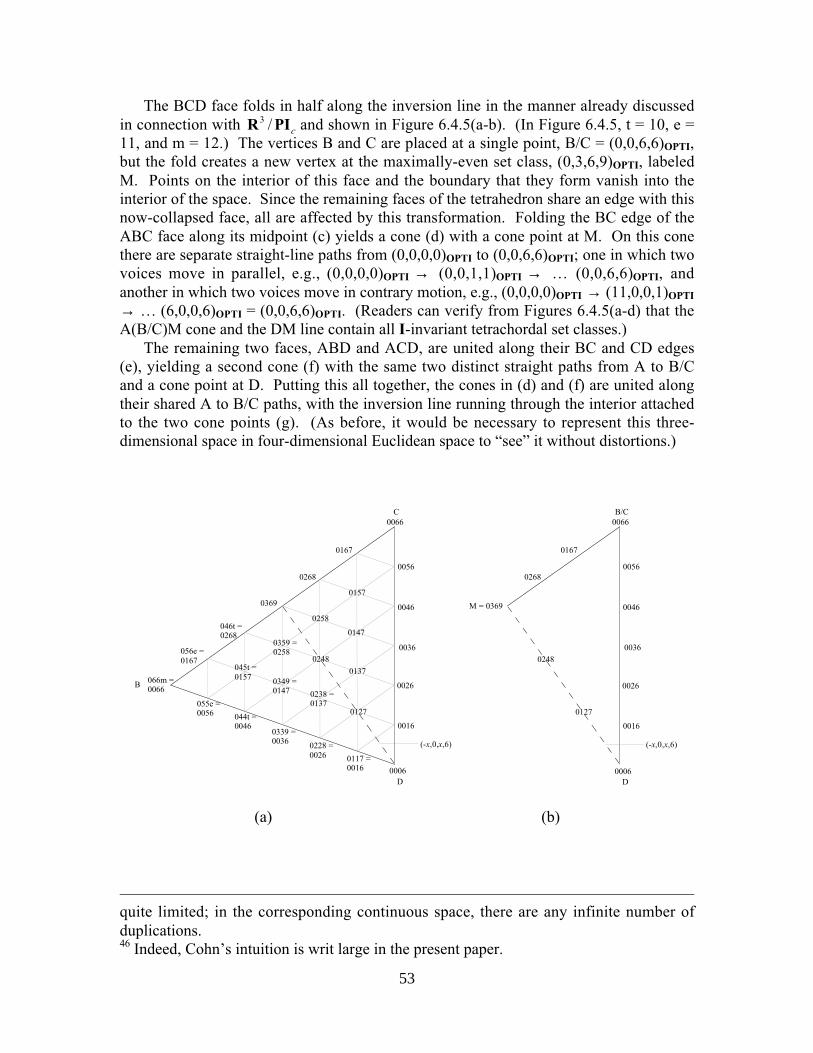
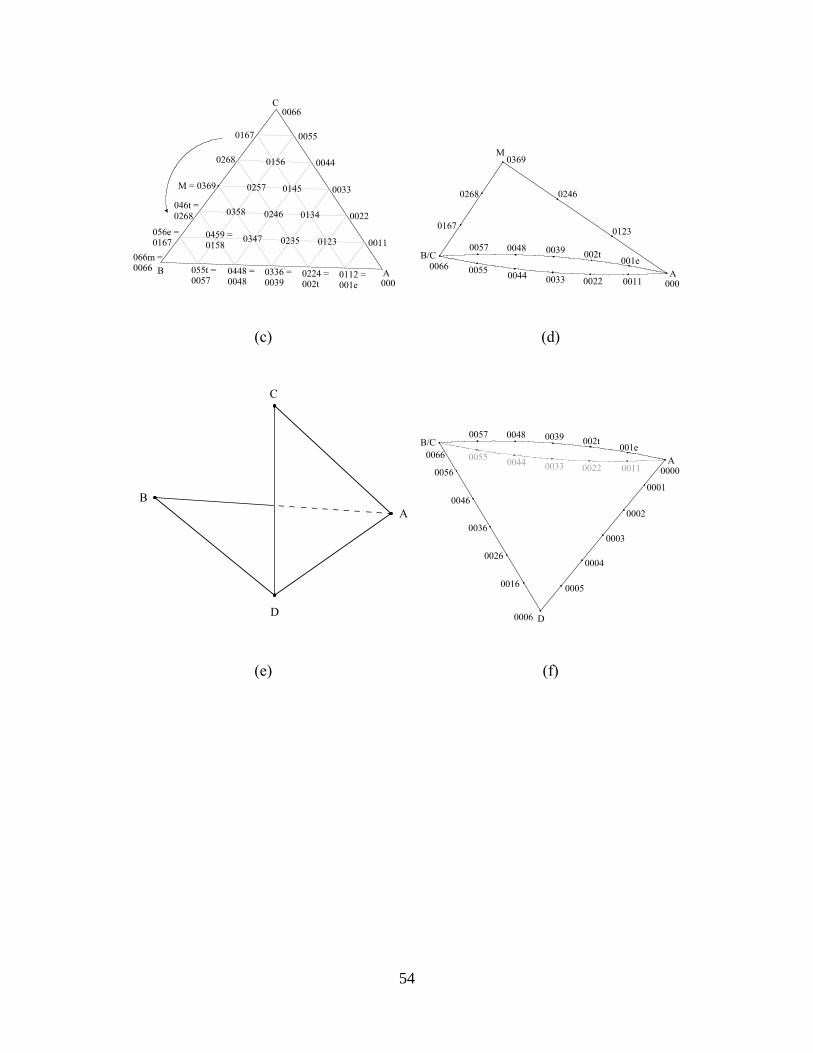
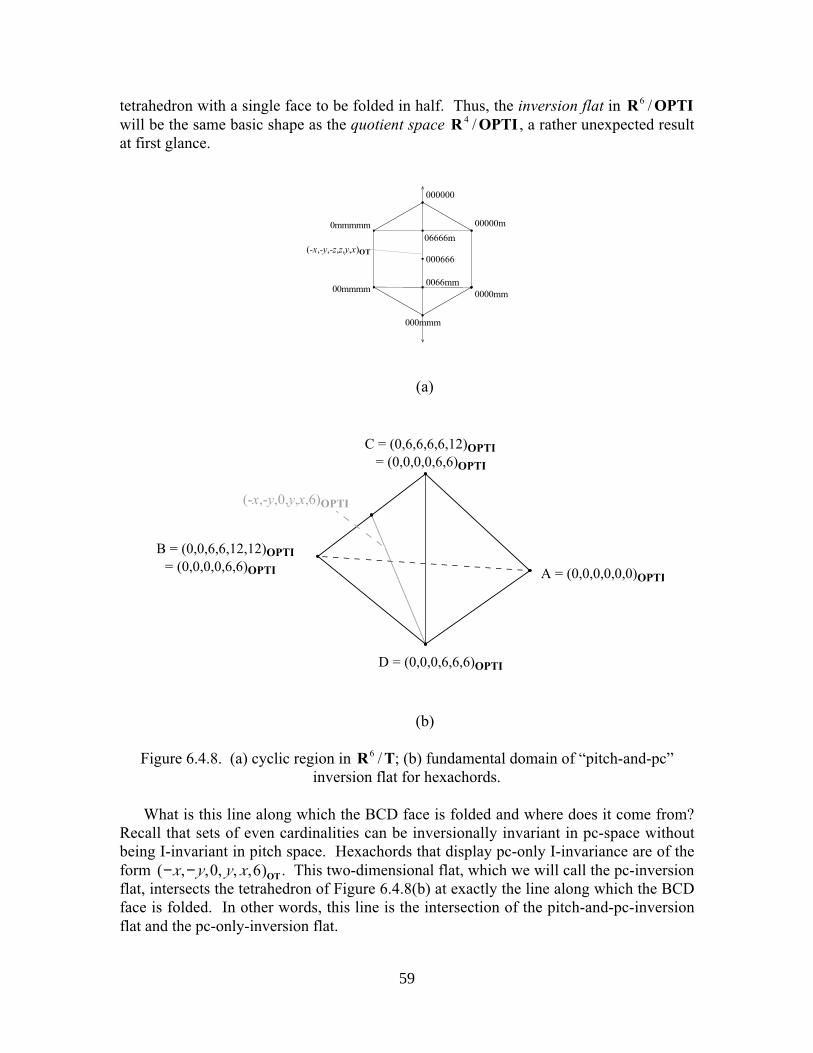
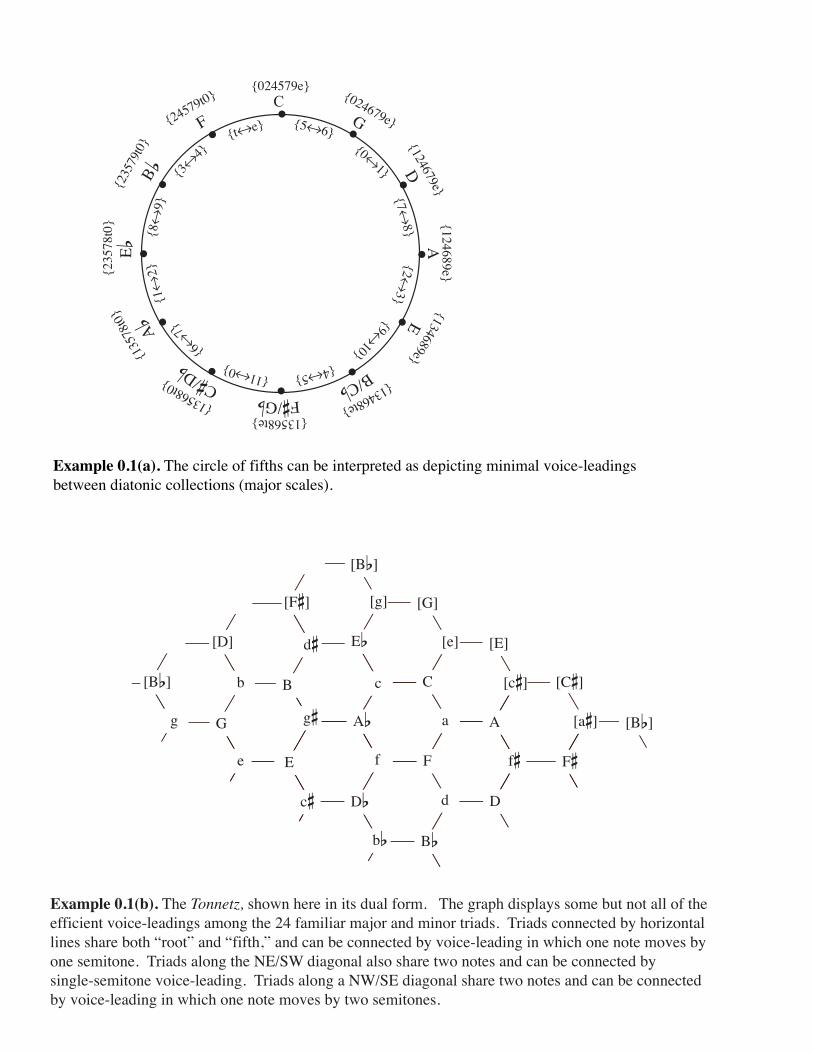
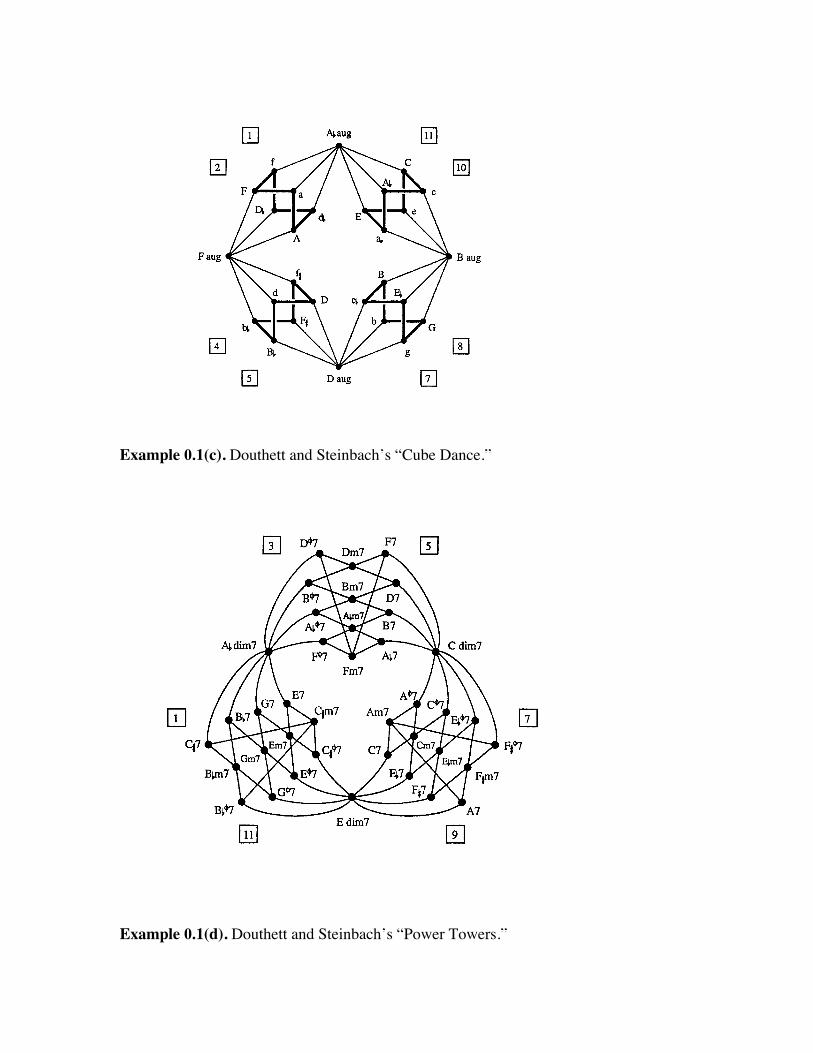
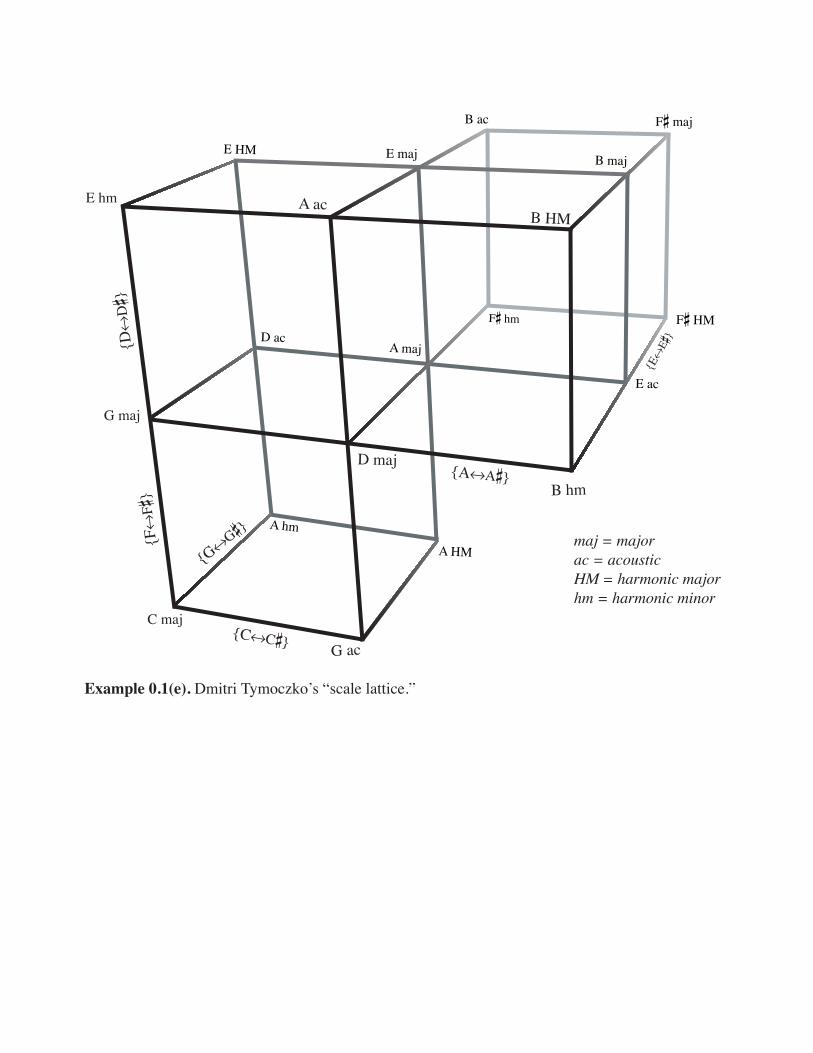
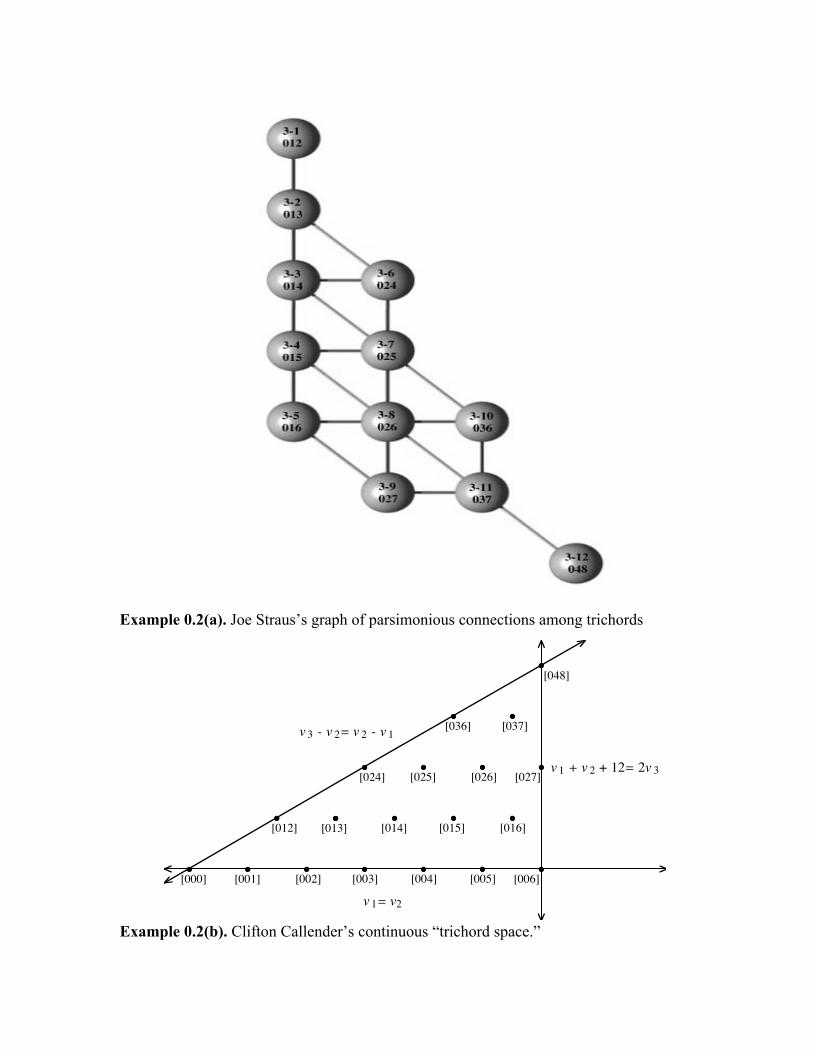
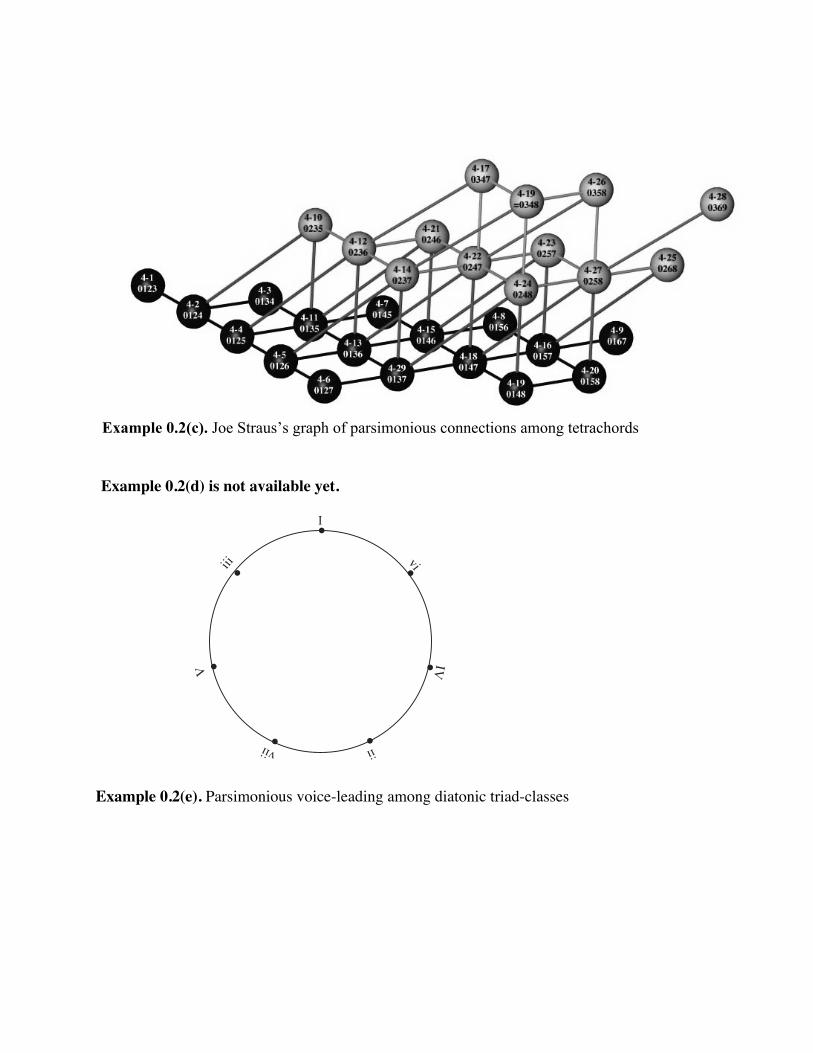
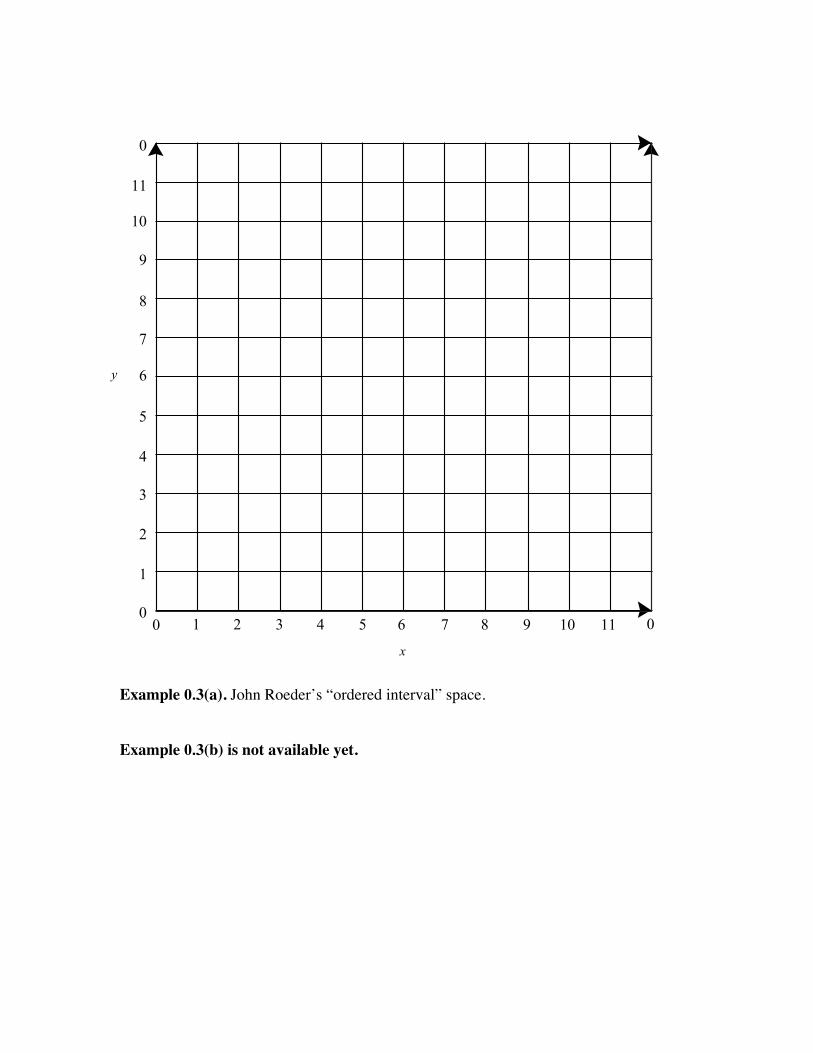
GENERALIZED CHORD SPACES Clifton Callender, Florida State University Ian Quinn, Yale University Dmitri Tymoczko, Princeton University Draft of 20 June 2005. This is a work in progress. Music theorists have been using geometrical models to explore voice-leading for almost three hundred years. These models come in a wide variety of seemingly unrelated forms. Some model the voice-leading possibilities between individual chords: the familiar circle of fifths (Example 0.1[a]), the Oettingen/Riemann Tonnetz (Example 0.1[b]), Jack Douthett and Peter Steinbach’s “Cube Dance” (Example 0.1[c]) and “Power Towers” (Example 0.1[d]), and Dmitri Tymoczko’s “scale lattice” (Example 0.1[e]). Others model voice-leading possibilities between set-classes: Joe Straus’s discrete model of trichord space (Example 0.2[a]); Clifton Callender’s triangular model of continuous trichord-space (Example 0.2[b]); Straus’s 2D model of discrete tetrachordal set-class space (Example 0.2[c]); Richard Cohn’s 3D tetrahedral model of tetrachordal set-class space (Example 0.2[d]); and the familiar model of diatonic triad-classes shown in Example 0.2(e). Still other geometrical models depict voice-leading possibilities between ordered sets and set-classes: most notably, John Roeder’s “ordered interval space” (Example 0.3[a]), which has been further explored and developed by Clifton Callender (Example 0.3[b]). [Examples 0.1-0.3 will be found in a separate file.] The great diversity of these geometrical models raises a host of difficult theoretical questions. First, how do these models relate to one another? Are they like maps of different continents, or do they offer alternate perspectives on the same underlying terrain? Second, can we generalize these models, so that they are as complete and comprehensive as possible? Many of the above models deal with only a restricted range of sets and set-classes: for instance, the models in Example 0.1 treat only a small set of familiar scales and chords; while those in Example 0.2(a) and (c) deal only with the equal tempered set-classes—themselves a small subset of the available harmonic resources. Is it possible to generalize these maps so that they include all possible n-note chords or chord-types? Finally, what are the music-theoretical consequences of thinking geometrically about harmonic objects? Theorists are accustomed to describing music in discrete terms, using combinatorics and finite groups. Yet the notion of geometry essentially involves mathematical concepts that go beyond those that are used in discrete mathematics—notions such as continuity, “straight line,” and distance. Does a mature geometrical perspective require music theorists to master a new set of tools, and do these new tools shed new light on familiar musical concepts such as “interval” and “chord”? In this paper we attempt to answer all these questions. We show that the various structures in Examples 0.1-0.3 are in fact deeply interrelated—different perspectives on, or regions of, the same underlying geometrical space. We show how to extend these geometrical models so that they describe all the voice-leading possibilities between all possible sets and set-classes, both unordered and ordered. We show that understanding these voice-leading spaces requires music theorists to absorb new mathematical tools—
Transcript
GENERALIZED CHORD SPACES
Clifton Callender, Florida State UniversityIan Quinn, Yale University
Dmitri Tymoczko, Princeton University
Draft of 20 June 2005. This is a work in progress.
Music theorists have been using geometrical models to explore voice-leading foralmost three hundred years. These models come in a wide variety of seemingly unrelatedforms. Some model the voice-leading possibilities between individual chords: thefamiliar circle of fifths (Example 0.1[a]), the Oettingen/Riemann Tonnetz (Example0.1[b]), Jack Douthett and Peter Steinbach’s “Cube Dance” (Example 0.1[c]) and “PowerTowers” (Example 0.1[d]), and Dmitri Tymoczko’s “scale lattice” (Example 0.1[e]).Others model voice-leading possibilities between set-classes: Joe Straus’s discrete modelof trichord space (Example 0.2[a]); Clifton Callender’s triangular model of continuoustrichord-space (Example 0.2[b]); Straus’s 2D model of discrete tetrachordal set-classspace (Example 0.2[c]); Richard Cohn’s 3D tetrahedral model of tetrachordal set-classspace (Example 0.2[d]); and the familiar model of diatonic triad-classes shown inExample 0.2(e). Still other geometrical models depict voice-leading possibilities betweenordered sets and set-classes: most notably, John Roeder’s “ordered interval space”(Example 0.3[a]), which has been further explored and developed by Clifton Callender(Example 0.3[b]). [Examples 0.1-0.3 will be found in a separate file.]
The great diversity of these geometrical models raises a host of difficulttheoretical questions. First, how do these models relate to one another? Are they likemaps of different continents, or do they offer alternate perspectives on the sameunderlying terrain? Second, can we generalize these models, so that they are as completeand comprehensive as possible? Many of the above models deal with only a restrictedrange of sets and set-classes: for instance, the models in Example 0.1 treat only a smallset of familiar scales and chords; while those in Example 0.2(a) and (c) deal only with theequal tempered set-classes—themselves a small subset of the available harmonicresources. Is it possible to generalize these maps so that they include all possible n-notechords or chord-types? Finally, what are the music-theoretical consequences of thinkinggeometrically about harmonic objects? Theorists are accustomed to describing music indiscrete terms, using combinatorics and finite groups. Yet the notion of geometryessentially involves mathematical concepts that go beyond those that are used in discretemathematics—notions such as continuity, “straight line,” and distance. Does a maturegeometrical perspective require music theorists to master a new set of tools, and do thesenew tools shed new light on familiar musical concepts such as “interval” and “chord”?
In this paper we attempt to answer all these questions. We show that the variousstructures in Examples 0.1-0.3 are in fact deeply interrelated—different perspectives on,or regions of, the same underlying geometrical space. We show how to extend thesegeometrical models so that they describe all the voice-leading possibilities between allpossible sets and set-classes, both unordered and ordered. We show that understandingthese voice-leading spaces requires music theorists to absorb new mathematical tools—
2
notions from geometry and topology, including the concept of a “quotient space.” Andwe will argue that these new tools provide interesting new perspectives on some basicmusic theoretical concepts, including the notion of “interval,” “interval class,” and“transformation.” Our ultimate goal is to attempt to move geometrical ideas to the centerof music theory, displacing—or at least complementing—the finite, combinatorialparadigm that has dominated the field for the last few decades.
More specifically, we will argue that the spaces in Examples 0.1-0.3 belong to alarger family of geometrical spaces that share a few essential features. A point in thesespaces corresponds to a harmonic object such as a “chord” or “set-class.” A straight pathbetween two points corresponds to a voice-leading between them, with the length of thepath equal to the “size” of the voice-leading it represents. Consequently, the distancebetween two points corresponds to the size of the minimal voice-leading between the twoharmonic objects. These features together imply that the graphs in Examples 0.1-0.3 canbe treated in a unified way: they are all quotients of the same fundamental type of space,or spaces that result from “gluing together” points in a larger “parent space.” We willbegin, in §§1-2, by introducing showing how to translate traditional music theoreticalideas into the language of geometry. In §3-6 we use geometrical concepts to demonstratethe essential unity of the graphs in Examples 0.1-0.3. In §§7-9 we begin to take up someof the larger theoretical issues raised by the discussion.
§1. Sixteen ways of looking at a warhorse
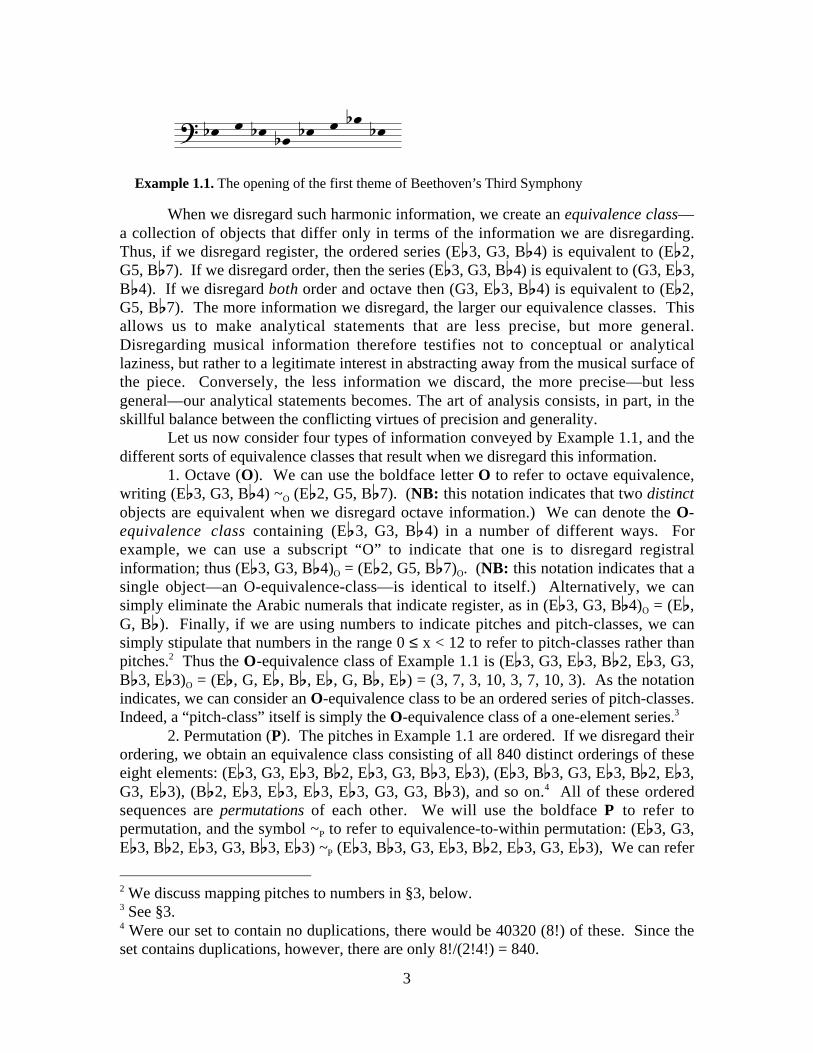
1.0. Example 1.1 presents the beginning of the main theme of the first movementof Beethoven’s Eroica symphony, suppressing all information about rhythm, tempo,timbre, and instrumentation. What remains is an abstract notation encoding various typesof harmonic information—information about the order, register, absolute transpositionallevel, absolute direction of intervallic motion, and cardinality of the notes in thispassage. Depending on our musical interests, we may wish to disregard some of or all ofthis information. We can, for example, describe Example 1.1 as an ordered series ofpitches (Ef3, G3, Ef3, Bf2, Ef3, G3, Bf3, Ef3)1, as an unordered collection of pitch-classes {Ef, Ef, Ef, Ef, G, G, Bf, Bf}, as an “Ef major triad,” as a “major triad,” or—perhaps most generally or all—a “consonant triad” or member of set-class 3-11[037].These descriptions are all equally correct, though they involve different degrees ofprecision. They therefore suggest different analytical consequences: under somedescriptions the harmonic object shown Example 1.1 is “the same” as the chord stated atthe opening of the movement; but under others it is not. Likewise, under somedescriptions it is “the same” as the chord that opens the Symphony of Psalms, while underothers it is not.
1 In this paper, regular parentheses denote ordered series, so that (a, b, c) ≠ (b, c, a).Curly braces denote unordered sets. Thus {a, b, c} = {b, c, a}.
3
? œbœœb
œb
œbœœb
œb
Example 1.1. The opening of the first theme of Beethoven’s Third Symphony
When we disregard such harmonic information, we create an equivalence class—a collection of objects that differ only in terms of the information we are disregarding.Thus, if we disregard register, the ordered series (Ef3, G3, Bf4) is equivalent to (Ef2,G5, Bf7). If we disregard order, then the series (Ef3, G3, Bf4) is equivalent to (G3, Ef3,Bf4). If we disregard both order and octave then (G3, Ef3, Bf4) is equivalent to (Ef2,G5, Bf7). The more information we disregard, the larger our equivalence classes. Thisallows us to make analytical statements that are less precise, but more general.Disregarding musical information therefore testifies not to conceptual or analyticallaziness, but rather to a legitimate interest in abstracting away from the musical surface ofthe piece. Conversely, the less information we discard, the more precise—but lessgeneral—our analytical statements becomes. The art of analysis consists, in part, in theskillful balance between the conflicting virtues of precision and generality.
Let us now consider four types of information conveyed by Example 1.1, and thedifferent sorts of equivalence classes that result when we disregard this information.
1. Octave (O). We can use the boldface letter O to refer to octave equivalence,writing (Ef3, G3, Bf4) ~O (Ef2, G5, Bf7). (NB: this notation indicates that two distinctobjects are equivalent when we disregard octave information.) We can denote the O-equivalence class containing (Ef3, G3, Bf4) in a number of different ways. Forexample, we can use a subscript “O” to indicate that one is to disregard registralinformation; thus (Ef3, G3, Bf4)O = (Ef2, G5, Bf7)O. (NB: this notation indicates that asingle object—an O-equivalence-class—is identical to itself.) Alternatively, we cansimply eliminate the Arabic numerals that indicate register, as in (Ef3, G3, Bf4)O = (Ef,G, Bf). Finally, if we are using numbers to indicate pitches and pitch-classes, we cansimply stipulate that numbers in the range 0 ≤ x < 12 to refer to pitch-classes rather thanpitches.2 Thus the O-equivalence class of Example 1.1 is (Ef3, G3, Ef3, Bf2, Ef3, G3,Bf3, Ef3)O = (Ef, G, Ef, Bf, Ef, G, Bf, Ef) = (3, 7, 3, 10, 3, 7, 10, 3). As the notationindicates, we can consider an O-equivalence class to be an ordered series of pitch-classes.Indeed, a “pitch-class” itself is simply the O-equivalence class of a one-element series.3
2. Permutation (P). The pitches in Example 1.1 are ordered. If we disregard theirordering, we obtain an equivalence class consisting of all 840 distinct orderings of theseeight elements: (Ef3, G3, Ef3, Bf2, Ef3, G3, Bf3, Ef3), (Ef3, Bf3, G3, Ef3, Bf2, Ef3,G3, Ef3), (Bf2, Ef3, Ef3, Ef3, Ef3, G3, G3, Bf3), and so on.4 All of these orderedsequences are permutations of each other. We will use the boldface P to refer topermutation, and the symbol ~P to refer to equivalence-to-within permutation: (Ef3, G3,Ef3, Bf2, Ef3, G3, Bf3, Ef3) ~P (Ef3, Bf3, G3, Ef3, Bf2, Ef3, G3, Ef3), We can refer
2 We discuss mapping pitches to numbers in §3, below.3 See §3.4 Were our set to contain no duplications, there would be 40320 (8!) of these. Since theset contains duplications, however, there are only 8!/(2!4!) = 840.
4
to the P-equivalence class containing an ordered set either with the subscript “P” or(somewhat more traditionally) using curly braces. Thus the equivalent notations {Bf2,Ef3, Ef3, Ef3, Ef3, G3, G3, Bf3} and (Ef3, G3, Ef3, Bf2, Ef3, G3, Bf3, Ef3)P refer tothe class containing all 840 orderings of the 8 elements Bf2, Ef3, Ef3, Ef3, Ef3, G3, G3,and Bf3.
3. Transposition (T). We can also disregard the specific notes in Example 1.1,considering only the intervallic content of the passage. That is, we disregard thetranspositional level at which the pattern of Example 1.1 is stated. We will use aboldface T to refer to equivalence-under-transposition, writing: (Ef3, G3, Ef3, Bf2, Ef3,G3, Bf3, Ef3) ~T (D4, Fs4, D4. A3. D4, Fs4, A4, D4). Similarly, we can use thesubscript “T” to indicate equivalence-classes under transposition. Thus (Ef3, G3, Bf3)Trefers to the T-equivalence class containing (Ef3, G3, Bf3).
4. Inversion (I). Finally, we can abstract from the absolute direction of theintervals in Example 1.1. That is, we could consider the sequence (Ef3, G3, Ef3, Bf2,Ef3, G3, Bf3, Ef3) to be equivalent to one of its inversions in pitch-space, such as (Ef3,Cf2, Ef3, Af3, Ef3, Cf2, Af2, Ef3). Here, ascending intervals have been replaced bydescending intervals and vice versa. I-equivalence, described in this way, is a good dealless familiar than O, P, and T, equivalence. This is largely because music theorists areaccustomed to combining I-equivalence with T-equivalence.5 The details here aresomewhat subtle, and will be explored in depth below. For now, however, we willsimply declare that an inversion-class consists of two sequences of pitches (a1, a2, …, an)and (Ix(a1), Ix(a2), …, Ix(an)), where Ix is some absolute (non-contextual) inversion inpitch-space.
Naturally enough, the equivalence-classes generated by O, P, T, and I can becombined to form larger equivalence classes. Thus, for example, we could disregard bothoctave and order information, considering all objects that are OP-equivalent to the oneshown in Example 1.1. This OP-equivalence class is the set of all possible orderings ofthe pitch-classes {Ef, Ef, Ef, Ef , G, G, Bf, Bf}. This equivalence-class is morefamiliarly described as a multiset of pitch-classes—a collection in which cardinality butnot order is significant. In the same way, we could consider the equivalence-class of allordered pitch-series equivalent to Example 1.1 under transposition or inversion. Wemight call this equivalence-class the ordered TI-class of pitches containing Example 1.1.There are 16 (= 21.1) possible ways to combine of the equivalence-classes generated by O,P, T, and I, many of which have familiar music-theoretical names.
We will now briefly describe these 16 ways of looking at the harmonic content ofExample 1.1. Each corresponds to a different level of “abstraction” from the musicalsurface of the piece, and hence suggests a different level of analytical generality. Someof these ways of abstracting correspond to very familiar music-theoretical objects, whileothers are much less familiar.
1. (No equivalences) Without any equivalences, Example 1.1 is an ordered seriesof pitches: (Ef3, G3, Ef3, Bf2, Ef3, G3, Bf3, Ef3).
5 To make matters worse, there seem to be two different sorts of inversion: “absolute”inversions and “contextual inversions.” We discuss these later in the paper.
5
2. O. An ordered series of pitch-classes: (Ef, G, Ef, Bf, Ef, G, Bf, Ef) or (Ef3,G3, Ef3, Bf2, Ef3, G3, Bf3, Ef3)O.3. P. An unordered collection of pitches in which cardinality is important, or amultiset of pitches: {Bf2, Ef3, Ef3, Ef3, Ef3, G3, G3, Bf3}.4. T. An ordered transposition-class of pitches (Ef3, G3, Ef3, Bf2, Ef3, G3,Bf3, Ef3)T = (D4, Fs4, D4. A3. D4, Fs4, A4, D4)T.5. OP. A multiset of pitch-classes: {Ef, Ef, Ef, Ef, G, G, Bf, Bf}.6. OPT. A transpositional multiset-class. {0, 0, 0, 0, 4, 4, 7, 7}T, in “normalform.”7. OPTI. A transpositional and inversional multiset-class. In “normal form,”{0, 0, 0, 0, 3, 3, 7, 7}TI.8. OT. An ordered transposition-class of pitch-classes, consisting of all sequencesof pitch-classes transpositionally equivalent to (Ef, G, Ef, Bf, Ef, G, Bf, Ef).9. OTI. An ordered transposition-and-inversion class of pitch-classes, consistingof all sequences of pitch-classes transpositionally or inversionally equivalent to(Ef, G, Ef, Bf, Ef, G, Bf, Ef).10. PT. An unordered transposition-class of pitches, consisting of every differentordering of every collection of pitches that is transpositionally equivalent to {Bf2,Ef3, Ef3, Ef3, Ef3, G3, G3, Bf3}.11. PTI. An unordered transposition-and-inversion class of pitches, consisting ofevery different ordering of every collection of pitches that is transpositionally orinversionally equivalent to {Bf2, Ef3, Ef3, Ef3, Ef3, G3, G3, Bf3}.12. TI. An ordered transposition-and-inversion class of pitches, consisting of allsequences of pitches transpositionally or inversionally equivalent to (Ef3, G3,Ef3, Bf2, Ef3, G3, Bf3, Ef3).13. I. An ordered inversion-class of pitches, consisting of (Ef3, G3, Ef3, Bf2,Ef3, G3, Bf3, Ef3) and one ordered sequence of pitches equivalent to it underinversion, such as (Ef3, Cf2, Ef3, Af3, Ef3, Cf2, Af2, Ef3).14. OI. An ordered inversion class of pitch-classes, consisting of (Ef, G, Ef, Bf,Ef, G, Bf, Ef) and one ordered sequence of pitch-classes equivalent to it underinversion, such as (Ef, Cf, Ef, Af, Ef, Cf, Af, Ef).15. PI. An unordered inversion-class of pitches, consisting of {Bf2, Ef3, Ef3,Ef3, Ef3, G3, G3, Bf3} and one unordered sequence of pitches equivalent to itunder inversion, such as {A4, E4, E4, E4, E4, C4, C4, A5},16. OPI. An unordered inversion-class of pitch-classes, consisting of {Ef, Ef, Ef,Ef, G, G, Bf, Bf} and one unordered sequence of pitches equivalent to it underinversion, such as {A, A, C, C, E, E, E, E},
Consider now the different geometrical models shown in Examples 0.1-0.3. Eachof these models can be interpreted as displaying the voice-leading relationships amongequivalence classes generated by some combination of O, P, T, and I. Those in Example0.1 depict voice-leading relationships among “chords,” or—in our terminology—OP-equivalence classes. Those in Example 0.2 depict voice-leading relationships among “setclasses,” or in our terminology OPTI-equivalence classes. Finally, those in Example 0.3depict voice-leading relationships among ordered transposition-classes, or T-equivalence
6
classes.6 The essential idea of the present paper is to provide a geometricalcharacterization of the notions of O, P, T , and I equivalence, thereby specifying therelation between the models shown in Examples 0.1-0.3. We show that in disregardinginformation about octave, order, transposition level, or the “direction” of motion in pitch-class space, we are identifying, or “gluing together,” points in a geometrical space. Thisintuitive notion of “gluing together” is captured by the mathematical notion of a quotient-space. Thus the different geometrical models in Example 0.1-0.3 represent differentquotient-spaces that can be formed from the same underlying space.
However, the geometrical approach works best if we restrict the range ofacceptable equivalence classes to those that give rise to consistent geometricalinterpretations. This requirement leads to several important (and somewhat surprising)departures from music-theoretical tradition. Perhaps the least surprising of thesedepartures is the suggestion that P-equivalence is very closely analogous to O-, T-, and I-equivalence: from the geometrical perspective, unordered harmonic objects are simplyequivalence classes of ordered harmonic objects, just as multisets of pitch-classes areequivalence-classes of multisets of pitches. By contrast, the traditional approach tend tomake a much stronger distinction between unordered and ordered objects.7 Rather moresurprising, however, is the fact that the geometrical approach leads us to ignore threetypes of equivalence-class that are very important to traditional music-theory:equivalence to within pitch-class duplication, equivalence under intervallicmultiplication, and “Z-equivalence,” or equivalence to within total intervallic content.We end this section by briefly considering these three types of equivalence class, andsketching how they conflict with the geometrical approach of the present paper.
5. Cardinality (C). Equivalence to within duplication of pitches and pitch-classesis central to the traditional music-theoretical notions of “set” and “set-class.” Accordingto the traditional view, the unordered collections of pitch-classes {Ef, G, Ef, Bf} and{Ef , G, Bf} both instantiate the same pitch-class set, namely {Ef , G, Bf}. Ourgeometrical approach suggests that we depart from tradition in this regard. For us, theunordered collections {Ef, G, Ef, Bf} and {Ef, G, Bf} are not equivalent, because theformer has two instances of pitch-class Ef, while {Ef, G, Bf} has only one. We willexplore the reasons for this in detail below; in essence, however, the problem is that inour geometrical models, the number of notes in a chord corresponds to the dimension ofthe underlying space. In identifying, say, the three-note set {0, 0, 4} with the two-noteset {0, 4} we are attempting to glue together a point in 3D-space with a point in 2D-space. As we will see, this sort of identification prevents us from conceiving of the sizeof a voice-leading as a “distance.”8 It is interesting to reflect that such a central aspect of
6 More specifically, Roeder’s spaces are OT-spaces, while Callender’s are O-spaces.Both authors further investigate regions of their spaces containing no chords equivalentunder P and I. This amounts to identifying a fundamental domain of the appropriategroup action. For an explanation of these concepts, see below.7 Examples?8 To get a feel for the problem, note that we would intuitively like the distance betweenthe ordered chords (0, 4, 4) and (0, 4, 5) to be 1, and similarly for the distance between(0, 0, 4) and (11, 0, 4). However, we would presumably like the distance between (0, 4,5) and (11, 0, 4) to be greater than 2, since the minimal voice-leading between these two
7
music-theoretical thinking—treating cardinality as inessential—is in conflict with thegeometrical approach to voice-leading. We hypothesize that this conflict with C-equivalence is what prevented the earlier emergence of a comprehensive geometricalapproach to voice-leading spaces.
6. Multiplication (M). Another traditional equivalence concerns equivalenceunder multiplication by x semitones or Mx-equivalence. The pitch-class sets {0, 1, 2}and {0, 5, 10} are M5-equivalent because {0 * 5, 1 * 5, 2 * 5} = {0, 5, 10}. We will findthat Mx-equivalence is again incompatible with the geometrical approach to voice-leadingspaces. Here the issue is that Mx-equivalence produces counter-intuitive results whencombined with O-equivalence in the context of continuous geometrical spaces. Take, forexample, the OM5-class containing the pitch-class C (= 0) and its “just fifth,” the pitch-class 12log2 3 - 12. Since 12log2 3 – 12 is irrational, its M5-equivalence class is infinitelylarge; furthermore, it contains elements arbitrarily close to every other pitch-classinterval containing C.9 Thus OM5-equivalence implies that every pitch-class interval isalmost equal to the acoustically pure fifth! Though this result does not involve outrightmathematical inconsistency, it is extremely counter-intuitive, leading to radicallynonstandard geometries of dubious musical utility. For this reason, we will not considerMx-equivalence in this paper.
7. Interval-class equivalence (Z). Two set-classes are Z-related (or Z-equivalent)if they share the same total interval-class content. Thus the set-classes {0, 1, 4, 6}OPTI and{0, 1, 3, 7}OPTI are Z-related since they both contain exactly one interval from eachinterval-class. (These are in fact the only four-element, Z-related set-classes.) However,Z-related set-classes do not, in general, have the same voice-leading capabilities: a chordbelonging to {0, 1, 4, 6}OPTI can be connected by single-semitone voice-leading to achord belonging to {0, 2, 4, 6}OPTI, while a chord belonging to {0, 1, 3, 7}OPTI cannot. Aswe will see, this means that the most reasonable definitions of “voice-leading size” areinconsistent with the notion of Z-equivalence: we can generate geometrical models inwhich points represent Z-equivalence classes, and we can generate geometrical models inwhich distances correspond to the size of minimal voice-leadings, but not both.10 We willexplore this matter further, below.
chords involves at least six semitones of motion. But this is extremely problematic if thedistance between (0, 0, 4) and (0, 4, 4) is 0, as it needs to be if these two chords arerepresented by a single point.9 This notion of “closeness” implies a concept of “distance” or a metric. For more onthis, see below.10 Suppose—as seems reasonable—the voice-leading distance between {0, 1, 4, 6}OPTI
and {0, 2, 4, 6}OPTI is 1, the distance between {0, 1, 2, 7}OPTI and {0, 1, 3, 7}OPTI is 1, andthe distance between {0, 1, 2, 7}OPTI and {0, 2, 4, 6}OPTI is greater than 2. We canrepresent Z-equivalence by letting the distance between {0, 1, 3, 7}OPTI and {0, 1, 4,6}OPTI be 0. But then the resulting assignments violate the triangle inequality, and cannotrepresent true “distances.”
8
§2. Quotient spaces, metrics, and group actions
We will now start to translate these familiar music-theoretical ideas intogeometrical terms. We begin by introducing four important mathematical concepts:space, metric, quotient space, and group action.
A space is simply be a collection of objects without any further structure. Thuswe can consider the space of all integers, or of all ordered pairs of real numbers, or ofpitch-classes, or indeed of almost anything else. The important point is that in defining aspace, we simply list the set of objects it contains, without saying anything at all abouthow they relate. Mathematicians typically use the term “space” to refer to topologicalspaces, which have slightly more structure than our minimalist “spaces.”11 For ourpurposes, we can think of topology as providing a very general sense in which twodistinct spaces can equivalent (or homeomorphic).12 As we will see, some familiarmusical spaces are topologically—but not geometrically—equivalent.
A metric gives us a way to measure “distances” in a space. Formally, a metric fora space S is a function d(x,y), from points in S to real numbers, that possesses fourproperties:
1. (Non-negativity) d(x,y) ≥ 0.2. (Identity of indiscernables) if d(x, y) = 0, then x = y.3. (Symmetry) d(x,y) = d(y,x).4. (Triangle inequality) d(x,z) ≤ d(x,y) + d(y,z), for all x, y, z in S.
A metric space consists of a space, along with a metric for that space.A quotient space, intuitively, is the result of “dividing” a space by an equivalence
relation: given a space S and an equivalence relation ~ over S, the quotient space S/~(pronounced “S modulo ~” or “S mod ~”) is the space consisting of the equivalenceclasses of ~. We can think of the quotient space S/~ as mapping all points in S to theirequivalence classes under ~. Equivalently, we can think of the quotient space S/~ ascreating a new space by identifying or “gluing together” all those points of S that areequivalent under the relation ~.
Note that a metric for a space will not necessarily give rise to a metric for thequotients of that space. Let S be a space, with metric d, and let ~ be an equivalencerelation over S. There is a natural way to extend d to the elements of S/~: define D(A,B), for all A, B in S/~, as the smallest value d(a, b) such that a ∈ A, b ∈ B. The functionD assigns to each pair of equivalence classes a number corresponding to the minimum ofthe distances between their elements. However, D does not always define a metric forS/~. (We will provide a practical illustration at the end of §3, below.) A metric on Sgenerates a metric on S/~ only when the metric and the equivalence relation are well-matched; in such cases, we say that the quotient space inherits a metric from its parent
11 A topological space is a space S, along with a set O of subsets of S. The elements of Oare called the open sets of S, and must satisfy four axioms: the empty set ∅ is in O; Sitself is in O; the union of an arbitrary number of elements of O is in O; and theintersection of a finite number of elements of O is in O. A set O satisfying these axiomsis called a topology for S, and can be used to define the notion of continuity.12 Two topological spaces A and B are topologically equivalent, or homeomorphic, ifthere is a bijective function A→B that sends only open sets in A to open sets in B.
9
space. As we will see, it is highly desirable to work with such spaces, since they allow usto use a single notion of “voice-leading size” to measure distances between a variety ofrelated harmonic objects, including ordered chords, unordered chords, and multiset-classes.
Next, we consider quotient spaces that are formed by the action of a group on aset. We will say that the group Γ acts on space S, if, for every group element g ∈ Γ, andevery point x ∈ S, we can assign a unique point gx ∈ S, such that the following conditionsobtain:
1. ex = x, for all x ∈ S, where e is the identity element of Γ; and2. g(h(x)) = (gh)x, for all x ∈ S, and all g, h ∈ Γ.
A group action of Γ on S is therefore a function Γ × S→S.13 The orbit of a point x underthe group action is the set of points {gx}, for all g ∈ Γ. It is readily checked that grouporbits are equivalence classes. Consequently, any group action of Γ on S defines anequivalence relation: x ~ y only if there exists some g ∈ Γ such that gx = y. We cantherefore take the quotient of S by a group action, notated S/Γ. Note that since a group Γcan act on a space S in a variety of ways, it is important, when discussing a quotient S/Γ,to specify the intended action.
We are now able to introduce the basic geometrical model of harmonic objectsthat we will use for the rest of the paper. To begin, we associate pitches with realnumbers R by stipulating that middle C corresponds to the number 60 and that ascendingby semitone corresponds to addition by 1. Thus B3 = 59, C4 = 60, Cs4 = 61, D = 62, D“quarter-tone-sharp” = 62.5 and so on. Note that since the real numbers are continuous,there is a real number corresponding to every conceivable pitch: every microtone andevery tone in every tuning system. (For example, the pitch a just fifth above middle Ccorresponds to the number 48 + 12log2 3.) We will interpret an ordered n-note series ofpitches as a point in the space Rn, the n-fold Cartesian product of real numbers. Givenany ordered pair of points in Rn, (x1, x2, …, xn) and (y1, y2, …, yn) we can associate aunique voice-leading between them, one that maps xn to yn, for all n. A metric for Rn canbe interpreted as measuring the size of these voice-leadings. As we will see, musictheorists have developed a variety of methods of measuring voice-leading size, almost allof which can be interpreted as metrics.
The central thesis of this paper is that the graphs in Examples 0.1-0.3 all belong toa family of quotients of the same space under different equivalence relations, andinheriting a single metric from the parent space. The underlying spaces are simply Rn,containing all possible ordered n-note series of pitches. The equivalence relations are thesixteen possible combinations of T, P, I, and O discussed in the previous section. Ametric for Rn corresponds to a method of measuring voice-leading size. What is specialabout T, P, I, and O is that they can be represented by groups of isometries of Rn: that is,groups that act so as to preserve the distances between any two points, according to any“reasonable” metric of voice-leading size. (We discuss the notion of a “reasonable”metric in Section 000, below.) As we will see, this means that these quotient spacesinherit metrics from their parent spaces. They therefore comprise a powerful andmutually consistent set of geometrical models of voice-leading, in which one and the
13 The notation A × B refers to the Cartesian product of A and B, or the set of all orderedpairs (a, b), such that a ∈ A, and b ∈ B.
10
same notion of “voice-leading size” can be used to describe the relation between a varietyof harmonic objects. (Some of these models are shown in Examples 0.1-0.3; others willbe described below.) By contrast C, Mx, and Z do not correspond to isometries of Rn,and the quotient spaces they generate do not inherit the standard metrics of voice-leadingsize. Consequently, these operations do not generate well-behaved geometrical modelssuch as those shown in Examples 0.1-0.3.
§3. One-note spaces
To illustrate these ideas, let us consider the various spaces associated with one-note “chords.” Although one-note spaces are not intrinsically very interesting, ourdiscussion will allow us to introduce some additional geometrical concepts that will beimportant in the remainder of the paper.
We begin by defining pitch-space, the space of all possible pitches. As explainedin §2, this is simply R, the space of all real numbers. Next, we choose a metric for R thatidentifies the distance between pitches. Equivalently, our metric represents a method ofmeasuring the size of the (one-voice) “voice-leadings” connecting one pitch to another.In general, it is quite difficult to choose a metric for the higher-dimensional spaces Rn.14
However, there is an extremely natural notion of “distance” in one-dimensional pitch-space: we can simply take the distance between two pitches to be determined by thefunction d(x,y) = |x – y|.15 Musically, this metric asserts that the distance between twopitches corresponds to the number of semitones between them.16 The metric thuscaptures the intuitively appealing idea that a “semitone” is a unit of distance.17 It is easilychecked that the metric |x – y| satisfies the four axioms in §2.
We will now describe the spaces that result from taking the quotient of the realline R, with the natural metric, by the equivalence-classes T, P, I, and O.
1. One-note O-space. Octave equivalence is modeled by the identification
O : x ~O x + 12
14 The difficulty is exacerbated if we want to find a metric that accurately reflects ourperceptual judgments. Indeed, it is not even clear that any metric is consistent with ourintuitive perceptual judgments about voice-leading. However, there are numerousalternative criteria for measuring voice-leading size, including logical consistency. See§000 for more discussion.15 This represents the “natural” metric for R. The most commonly-used mathematicalmetrics agree with this definition of one-dimensional distances. A key consideration hereis that, given some other metric d1 for R, we can often relabel the elements of R so as tosatisfy d1(x,y) = |x – y|. In effect, this sort of “relabeling” is what occurs when we use thelogarithm of a pitch’s fundamental frequency to generate the standard numerical model ofpitches.16 Note that this number need not be an integer, since we are considering continuouspitch-space.17 Indeed, we are virtually required to use this metric, or some trivial variant thereof, if wewant to consider a “semitone” to be a musical distance.
11
We can represent this equivalence relation as an action of the group 12Z of integermultiples of 12 on the space R of real numbers. The group 12Z acts on R by ordinaryaddition. Thus, the equivalence classes of R/O consist of the sets {…, x – 36, x – 24, x –12, x – 0, x +12, x + 24, x + 36, …}. These are simply the pitch-classes. A metric forR/O (or pitch-class space) can be defined by taking the distance between two pitch-classes A and B to be the smallest of the distances between elements of A and elementsof B. Thus R/O inherits a metric from R. This metric corresponds to the familiar music-theoretical notion of the “interval class” between two pitch-classes.
1 2 3 4 5 6
7
8 9
1
0
11
Example 3.1(a). Pitch-class space, represented as a circle
Example 3.1(b). Pitch-class space, represented as a line segment with endpoints identified
...
..
. . ..
.
. . . . . . . . . . . . .
..
0
0 1 2 3 4 5 6 7 8 9 10 11 [0]
Examples 3.1(a) and 3.1(b) depict the quotient space R/O in two different ways.Example 3.1(a) shows R/O as a familiar circle. This circle appears to be curved and two-dimensional. These, however, are extrinsic features of the representation, products of theway it R/O has been embedded in higher-dimensional Euclidean space, rather thanfeatures of the space itself. If one considers the circle R/O as a space unto itself, and notembedded in any higher-dimensional space, then it is flat (uncurved) and one-dimensional. (It is one-dimensional, roughly, because at any point there are only twodirections to move; it is flat, roughly, because it inherits the “natural”metric from R.) Example 3.1(b) removes any temptation to regard R/O as curved andtwo-dimensional, depicting the quotient space as a line segment whose endpoints areidentified. Unfortunately, Example 3.1(b) is misleading in a different way: althoughrepresented by distinct points in Euclidean space, the two endpoints of Example 3.1(b)
12
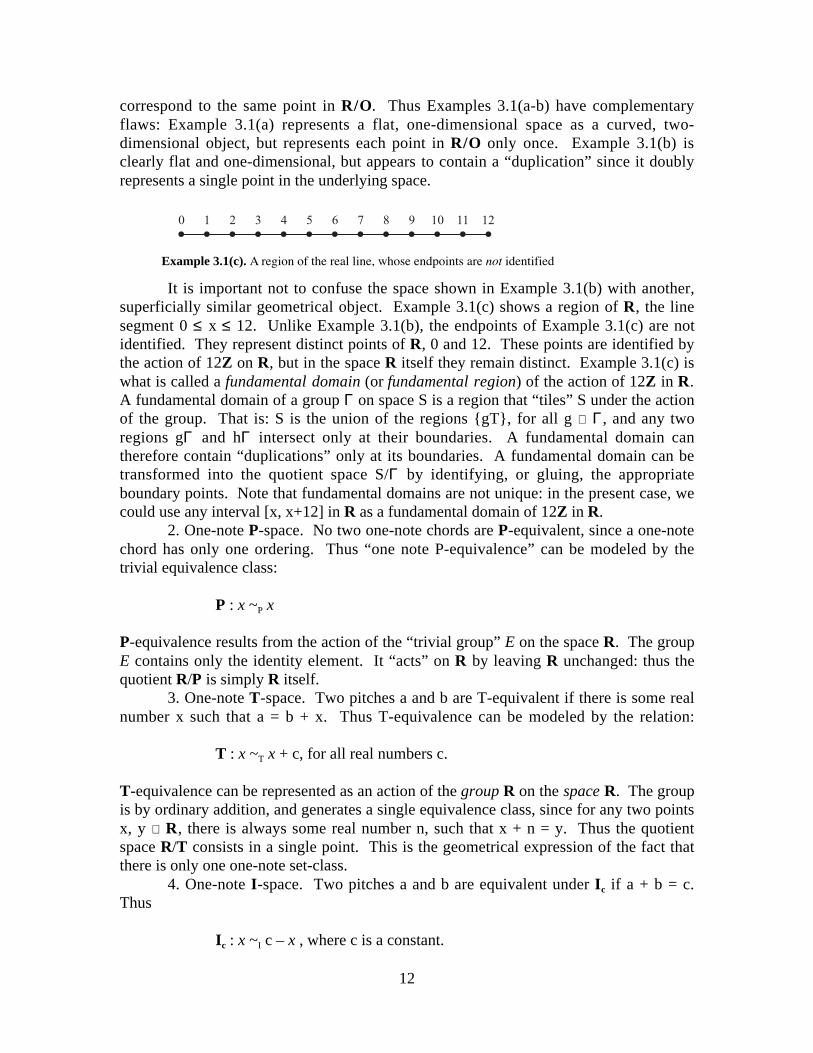
correspond to the same point in R/O. Thus Examples 3.1(a-b) have complementaryflaws: Example 3.1(a) represents a flat, one-dimensional space as a curved, two-dimensional object, but represents each point in R/O only once. Example 3.1(b) isclearly flat and one-dimensional, but appears to contain a “duplication” since it doublyrepresents a single point in the underlying space.
Example 3.1(c). A region of the real line, whose endpoints are not identified
It is important not to confuse the space shown in Example 3.1(b) with another,superficially similar geometrical object. Example 3.1(c) shows a region of R, the linesegment 0 ≤ x ≤ 12. Unlike Example 3.1(b), the endpoints of Example 3.1(c) are notidentified. They represent distinct points of R, 0 and 12. These points are identified bythe action of 12Z on R, but in the space R itself they remain distinct. Example 3.1(c) iswhat is called a fundamental domain (or fundamental region) of the action of 12Z in R.A fundamental domain of a group Γ on space S is a region that “tiles” S under the actionof the group. That is: S is the union of the regions {gT}, for all g ∈ Γ , and any tworegions gΓ and hΓ intersect only at their boundaries. A fundamental domain cantherefore contain “duplications” only at its boundaries. A fundamental domain can betransformed into the quotient space S/Γ by identifying, or gluing, the appropriateboundary points. Note that fundamental domains are not unique: in the present case, wecould use any interval [x, x+12] in R as a fundamental domain of 12Z in R.
2. One-note P-space. No two one-note chords are P-equivalent, since a one-notechord has only one ordering. Thus “one note P-equivalence” can be modeled by thetrivial equivalence class:
P : x ~P x
P-equivalence results from the action of the “trivial group” E on the space R. The groupE contains only the identity element. It “acts” on R by leaving R unchanged: thus thequotient R/P is simply R itself.
3. One-note T-space. Two pitches a and b are T-equivalent if there is some realnumber x such that a = b + x. Thus T-equivalence can be modeled by the relation:
T : x ~T x + c, for all real numbers c.
T-equivalence can be represented as an action of the group R on the space R. The groupis by ordinary addition, and generates a single equivalence class, since for any two pointsx, y ∈ R, there is always some real number n, such that x + n = y. Thus the quotientspace R/T consists in a single point. This is the geometrical expression of the fact thatthere is only one one-note set-class.
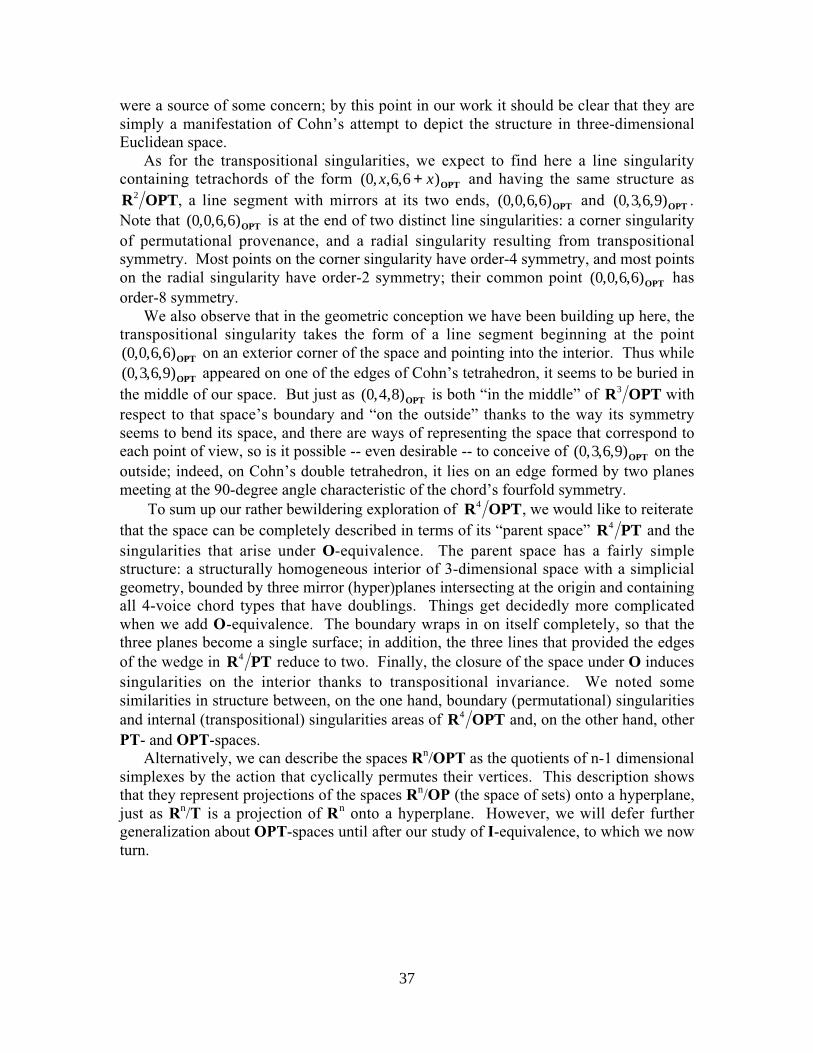
4. One-note I-space. Two pitches a and b are equivalent under Ic if a + b = c.Thus
Ic : x ~I c – x , where c is a constant.
13
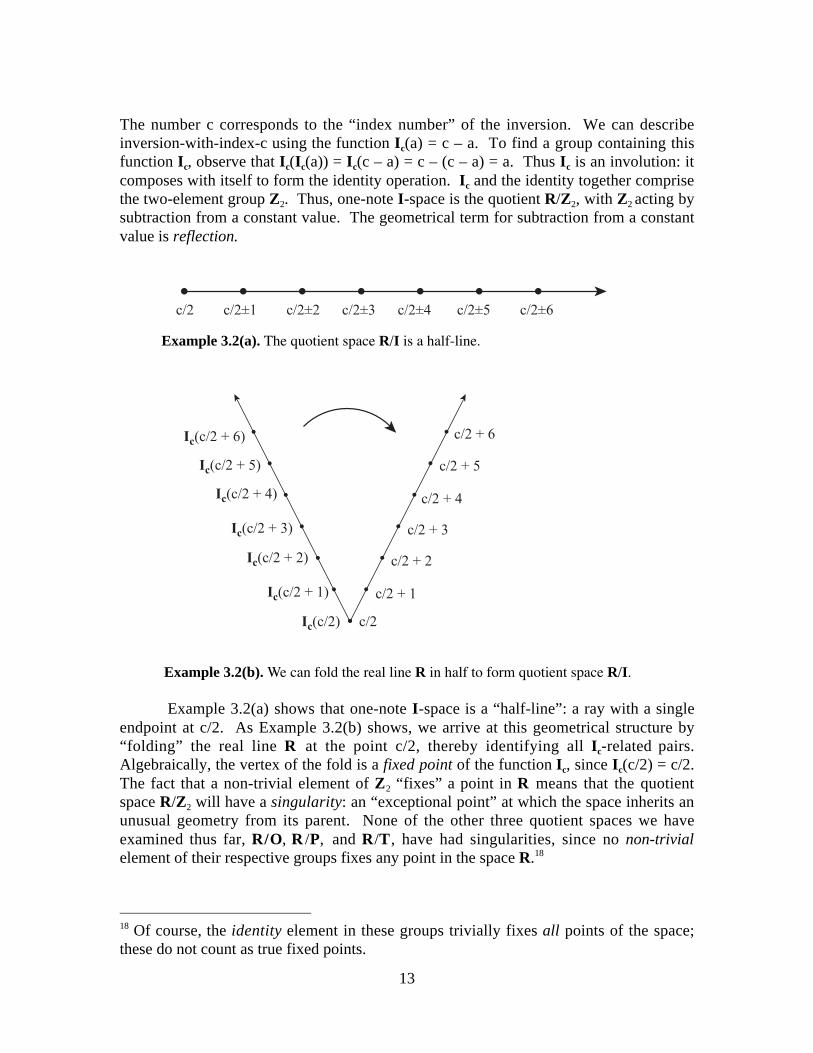
The number c corresponds to the “index number” of the inversion. We can describeinversion-with-index-c using the function Ic(a) = c – a. To find a group containing thisfunction Ic, observe that Ic(Ic(a)) = Ic(c – a) = c – (c – a) = a. Thus Ic is an involution: itcomposes with itself to form the identity operation. Ic and the identity together comprisethe two-element group Z2. Thus, one-note I-space is the quotient R/Z2, with Z2 acting bysubtraction from a constant value. The geometrical term for subtraction from a constantvalue is reflection.
Example 3.2(a). The quotient space R/I is a half-line.
Example 3.2(b). We can fold the real line R in half to form quotient space R/I.
Example 3.2(a) shows that one-note I-space is a “half-line”: a ray with a singleendpoint at c/2. As Example 3.2(b) shows, we arrive at this geometrical structure by“folding” the real line R at the point c/2, thereby identifying all Ic-related pairs.Algebraically, the vertex of the fold is a fixed point of the function Ic, since Ic(c/2) = c/2.The fact that a non-trivial element of Z2 “fixes” a point in R means that the quotientspace R/Z2 will have a singularity: an “exceptional point” at which the space inherits anunusual geometry from its parent. None of the other three quotient spaces we haveexamined thus far, R/O, R /P, and R/T, have had singularities, since no non-trivialelement of their respective groups fixes any point in the space R.18
18 Of course, the identity element in these groups trivially fixes all points of the space;these do not count as true fixed points.
14
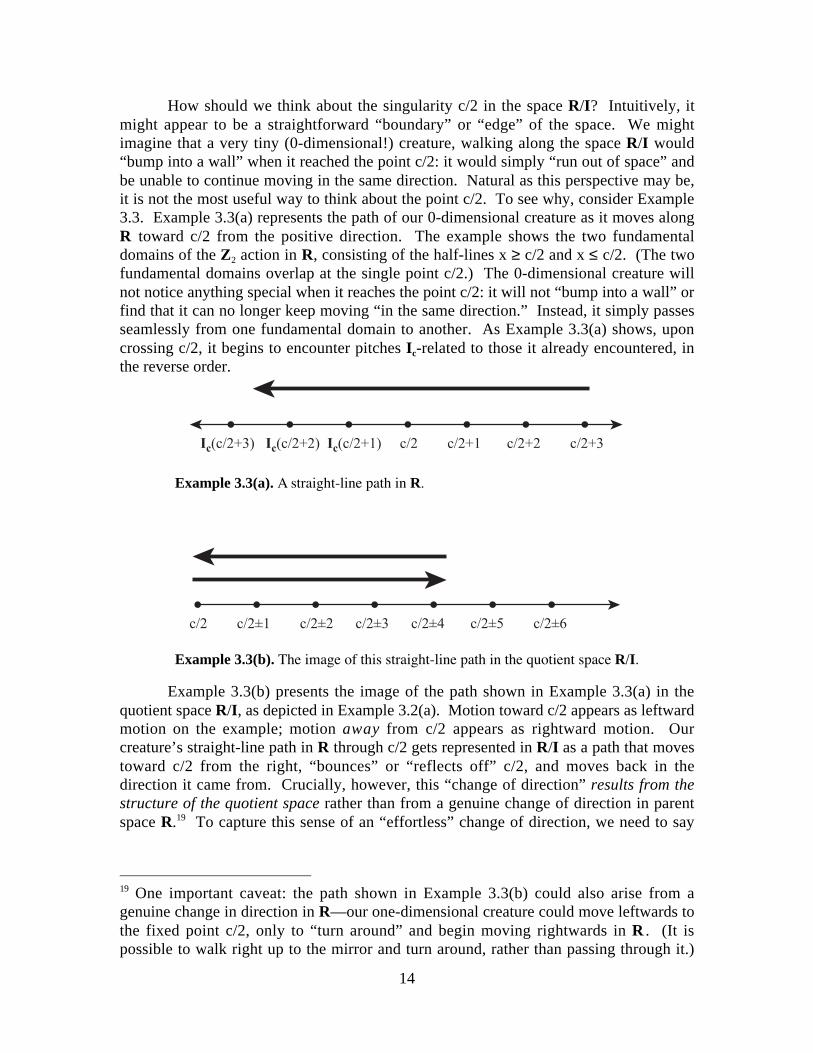
How should we think about the singularity c/2 in the space R/I? Intuitively, itmight appear to be a straightforward “boundary” or “edge” of the space. We mightimagine that a very tiny (0-dimensional!) creature, walking along the space R/I would“bump into a wall” when it reached the point c/2: it would simply “run out of space” andbe unable to continue moving in the same direction. Natural as this perspective may be,it is not the most useful way to think about the point c/2. To see why, consider Example3.3. Example 3.3(a) represents the path of our 0-dimensional creature as it moves alongR toward c/2 from the positive direction. The example shows the two fundamentaldomains of the Z2 action in R, consisting of the half-lines x ≥ c/2 and x ≤ c/2. (The twofundamental domains overlap at the single point c/2.) The 0-dimensional creature willnot notice anything special when it reaches the point c/2: it will not “bump into a wall” orfind that it can no longer keep moving “in the same direction.” Instead, it simply passesseamlessly from one fundamental domain to another. As Example 3.3(a) shows, uponcrossing c/2, it begins to encounter pitches Ic-related to those it already encountered, inthe reverse order.
Example 3.3(b). The image of this straight-line path in the quotient space R/I.
Example 3.3(b) presents the image of the path shown in Example 3.3(a) in thequotient space R/I, as depicted in Example 3.2(a). Motion toward c/2 appears as leftwardmotion on the example; motion away from c/2 appears as rightward motion. Ourcreature’s straight-line path in R through c/2 gets represented in R/I as a path that movestoward c/2 from the right, “bounces” or “reflects off” c/2, and moves back in thedirection it came from. Crucially, however, this “change of direction” results from thestructure of the quotient space rather than from a genuine change of direction in parentspace R.19 To capture this sense of an “effortless” change of direction, we need to say
19 One important caveat: the path shown in Example 3.3(b) could also arise from agenuine change in direction in R—our one-dimensional creature could move leftwards tothe fixed point c/2, only to “turn around” and begin moving rightwards in R . (It ispossible to walk right up to the mirror and turn around, rather than passing through it.)
15
that there is something about the structure of the space R/I that causes straight lines toretrace their steps when they reach the point c/2. The metaphor of a mirror or reflectingboundary allows us to do just that. Most, but not all of the singularities we will encounterin this paper act like mirrors.20 Singularities result when we import the geometricalstructure of the parent space—including its “angles” and “straight lines”—into thequotient space. The mathematical term orbifold describes a quotient space that inherits ageometry from its parent space, including its angles, straight-lines, and distances.Singularities are a characteristic feature of orbifolds.
These concepts have very natural musical interpretations. We could reframe ournarrative about the “0-dimensional creature” as a narrative about a musical voice thatglissandos continuously in register through the point c/2. From a phenomenologicalperspective, we would not notice a dramatic “change in direction” as the voice passedthrough the fixed point c/2. Analytically, however, we might wish to assert that themusical voice retraces familiar harmonic territory once it passes through c/2. Here, the“harmonic objects” are given by the equivalence classes of Ic—the points of the quotientspace R/I. Our perceptual notion of “moving in a straight line,” however, derives fromthe parent space R. These two notions unite when we describe R/I as an orbifold thatinherits its geometry from R.
Finally, note that Example 3.3 shows that the quotient R/I inherits a metric fromR. As before, we define the “distance” between two equivalence classes in R/I as theminimum of the distances between any element of the first class and any element of thesecond. This definition simply reproduces the standard metric |x – y| on the half-line x ≥c/2. Note that it is a consequence of this definition that the shortest path between twopoints in R/I never passes through the mirror point c/2. This is a straightforwardconsequence of the triangle inequality. As we will see, this idea is closely connected tothe traditional contrapuntal principle that one should avoid “voice-crossings” betweensuccessive chords.
We conclude this section by considering two more spaces: the combined OPspace, and a “nonstandard” quotient space that does not inherit a metric from R.
5. We have seen that one-dimensional P space is the real line R, while one-dimensional T space is a single point. One of these spaces is “too big,” in the sense thatit is equivalent to the parent space R; the other is “too small” in the sense that consistsonly of a single point. Consequently, we do not expect P or T to combine with the otherequivalence classes to form interesting spaces. The two equivalence relations O and I,however, can be combined. We define OIc-equivalence as follows:
Thus, two paths in R, one “kinked” and one “straight” are mapped to the same “kinked”path in R/I.20 As we will see, the singularities in our spaces manifest themselves in two ways: by thefact that straight-lines passing through them “change direction,” and by the fact thatinfinitesimal circles surrounding them have an area less than πr2. Singularities having thefirst property invariably have the second property as well. Singularities having thesecond property need not have the first. These singularities manifest themselves solely inthe fact that circles surrounding them do not have the “correct” area—that is, that some ofthe space around the singularity is missing. We will encounter an example of this whenwe consider trichordal set-class space in §5, below
16
OIc : x ~OI x + 12 ~OI c – x, where c is a constant.
OI-equivalence can be represented as a group action of 12Z × Z2 on R, with 12Z and Z2
acting as before. To understand the space, consider the effect of reflection around pointc/2 on the circular space R/O, shown in Example 3.1(a). This reflection “folds” one halfof the circle onto the second half—just as we did in deriving Example 3.2(b). AsExample 3.4 shows “folding” a circle in half creates two fixed points: the expected fixedpoint c/2, and a second point halfway around the circle at c/2 + 6. This second point isalso a mirror point in R/OI. (NB: the fact that Example 3.4 is “curved” has no intrinsicsignificance, and merely illustrates the relation between Example 3.4 and Example 3.1;intrinsically, R/OI is a line-segment.)
c/2±1 c/2±2 c/2±3 c/2±4 c/2±5 c/2±6
Example 3.4. The quotient space R/OI is a line-segment with two mirror boundaries.
.
. ..
...
c/2
Where does this second mirror point come from? Consider ordinary pitchinversion around middle C. In pitch-space, this inversion has only one fixed point—theaxis of inversion, corresponding to the vertex of the “fold” shown in Example 3.2. Nowconsider the effect of this inversion on some pitches near middle C: E4, a major thirdabove middle C, is mapped onto Gs3, a major third below middle C; Fs4, a tritone abovemiddle C is mapped onto Fs3, a tritone below middle C. While E4 and Gs4 belong todifferent pitch-classes, Fs4 and Fs3 belong to the same pitch-class. In other words, in O-space, Fs3 and Fs4 are identified. Thus Ic has only one fixed point in pitch-space, buttwo fixed points in pitch-class space: one corresponding to the fixed point of the pitch-space inversion, the other resulting from the fact that inversion in pitch-space preservesthe pitch-class of pitches one or more tritones away from the inversional axis.
As we will see, the one-note OI space shown in Example 3.4 is isomorphic totwo-note OPT-space, more familiarly known as the voice-leading space of two-note set-classes.21 This represents our first encounter with an interesting phenomenon: a singlespace that has two different musical applications.
21 Strictly speaking, multiset classes.
17
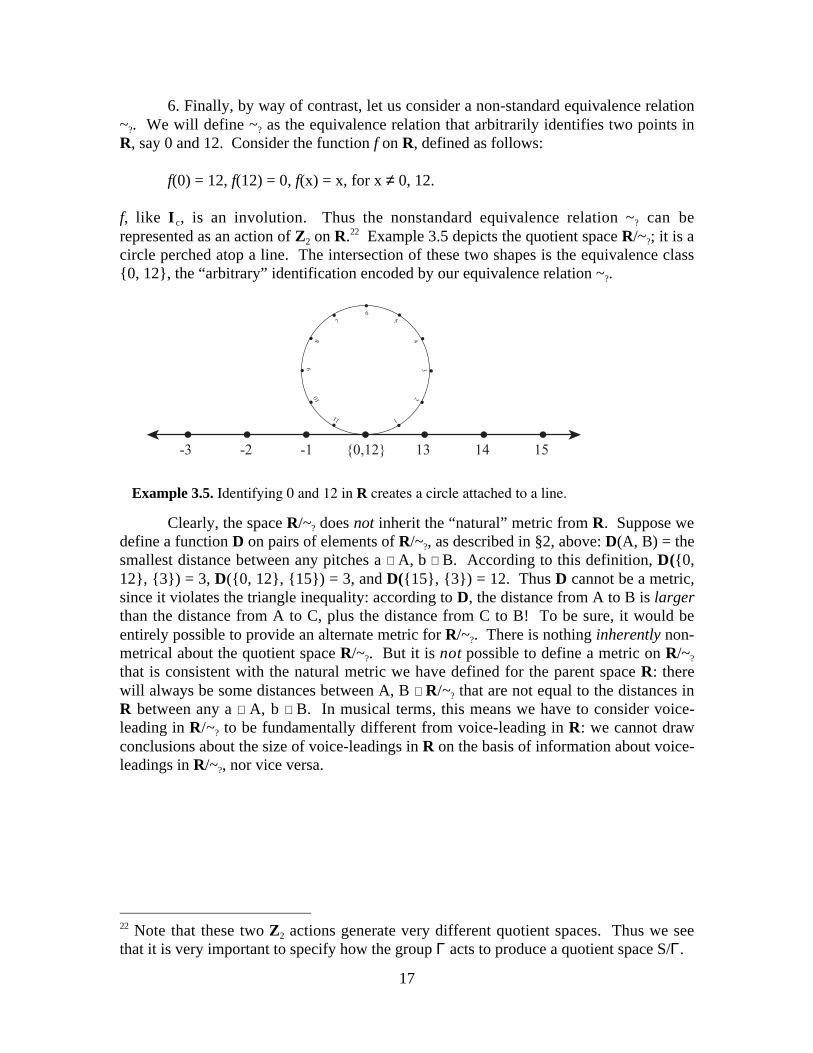
6. Finally, by way of contrast, let us consider a non-standard equivalence relation~?. We will define ~? as the equivalence relation that arbitrarily identifies two points inR, say 0 and 12. Consider the function f on R, defined as follows:
f(0) = 12, f(12) = 0, f(x) = x, for x ≠ 0, 12.
f, like I c, is an involution. Thus the nonstandard equivalence relation ~? can berepresented as an action of Z2 on R.22 Example 3.5 depicts the quotient space R/~?; it is acircle perched atop a line. The intersection of these two shapes is the equivalence class{0, 12}, the “arbitrary” identification encoded by our equivalence relation ~?.
Example 3.5. Identifying 0 and 12 in R creates a circle attached to a line.
. . . . . . . -3 -2 -1 {0,12} 13 14 15
6 5 4 3 2 1 1
1
10
9
8
7
...
..
. ..
...
Clearly, the space R/~? does not inherit the “natural” metric from R. Suppose wedefine a function D on pairs of elements of R/~?, as described in §2, above: D(A, B) = thesmallest distance between any pitches a ∈ A, b ∈ B. According to this definition, D({0,12}, {3}) = 3, D({0, 12}, {15}) = 3, and D({15}, {3}) = 12. Thus D cannot be a metric,since it violates the triangle inequality: according to D, the distance from A to B is largerthan the distance from A to C, plus the distance from C to B! To be sure, it would beentirely possible to provide an alternate metric for R/~?. There is nothing inherently non-metrical about the quotient space R/~?. But it is not possible to define a metric on R/~?
that is consistent with the natural metric we have defined for the parent space R: therewill always be some distances between A, B ∈ R/~? that are not equal to the distances inR between any a ∈ A, b ∈ B. In musical terms, this means we have to consider voice-leading in R/~? to be fundamentally different from voice-leading in R: we cannot drawconclusions about the size of voice-leadings in R on the basis of information about voice-leadings in R/~?, nor vice versa.
22 Note that these two Z2 actions generate very different quotient spaces. Thus we seethat it is very important to specify how the group Γ acts to produce a quotient space S/Γ.
18
§4. Classification of chord spaces I: R n, O- and P-equivalence.
4.0. We now turn to higher-dimensional spaces. In §4 we will consider spacesinvolving O- and P-equivalence. §5 considers T-equivalence, while §6 considers I-equivalence. Each of these sections concludes with a space central to music-theoreticalthinking: §4 concludes with OP-space, or the space of sets; §5 concludes with OPT-space, or the space of transpositional set-classes; and §6 concludes with OPTI-space, orthe space of TI-set-classes. These three types of space subsume the familiar music-theoretical graphs shown in Examples 0.1-0.3.
We begin by considering ordered chords of pitches. As noted above, we canrepresent such chords using Rn , the space of ordered n-tuples of real numbers. R1 is thereal number line itself, where each “number” is a point with a single coordinate. R2 isthe space of ordered pairs, with each element of the space having two coordinates( , )x x1 2 . Note that this space is not the familiar “Cartesian plane” since we do notpresuppose a Euclidean (or any other) metric; for this reason, we do not have theresources to say that R2 has “coordinate-axes” that are “orthogonal.” Similarly, R3 is notto be confused with the three-dimensional space of ordinary Euclidean geometry. Ourspaces Rn are simply spaces of ordered n-note series of real numbers ( , , , )x x xn1 2 L .
The elements of Rn describe ordered musical objects. This ordering can occur intime, as discussed in conjunction with Example 4 of §1 (the opening theme of the Eroicasymphony). It can also occur in register, as when we consider a chord to be ordered from“bottom to top.”23 Even more abstractly, we can use the ordering to identify instrumentsor musical voices. Here, while the consistent assignment of notes to voices, and of voicesto dimensions, is of significance, the particular assignment is not; there is no geometricalreason to choose an analysis of a four-voice chorale texture that consistently makes theassignment (S,A,T,B) over one that consistently makes the assignment (S,T,A,B). To besure, the former assignment ensures that order positions will typically also correspond toregistral position. But this is a mere curiosity: we can chose to use order to representregister, and we can chose to use order to represent instrumental voices, but we cannot doboth at the same time—at least if “voice-crossings” are a musical possibility.
Finally, it is worth reemphasizing that our use of real numbers to represent pitches isto some degree arbitrary. The decision to associate the distance 1 with the equal-tempered semitone is arbitrary, and proponents of other tuning systems might associatethe distance 1 with the octave, or the pure twelfth, or anything else. Similarly, thedecision to associate middle C with the number 60 is arbitrary. These arbitrary choices,however, do not fundamentally affect the geometry of the models we will be consideringhere: the spaces remain for all intents and purposes the same, no matter whether wemeasure distances in semitones, octaves, or otherwise, and no matter whether weassociate middle C with the number 60, 0, or any other number. Thus it is purely for thesake of familiarity that we adopt the convention that 60 means middle C (C4), 62 meansD4, 59 means B3, and so on.
23 Cf. John Roeder’s work.
19
4.1. We will refer to the order positions of points in Rn as “voices”—mindful of thefact that these “voices” can be manifested in a very wide range of musical ways.Between any two points in Rn, (x1, x2, …, xn) and (y1, y2, …, yn), we can associate aunique “voice-leading” between them, that sends x1 to y1, x2 to y2, and so on, for all n.The voice-leading therefore sends voice n (or order position n, or instrument n, or …) inchord X to voice n in chord Y. A metric for Rn measures the distance between any twopoints, and can be interpreted as measuring the “size” of the voice-leading between them.
Two common metrics are the Euclidean metric
δe n nx y x y x y x y( , ) ( ) ( ) ( )= − + − + + −1 12
1 12 2L
and the taxicab metric
δt n nx y x y x y x y( , ) = − + − + + −1 1 2 2 L .
Roughly speaking, the Euclidean metric measures distance “as the crow flies” (by meansof the generalized Pythagorean theorem), and the taxicab metric measures distance ineach dimension separately, summing the results. It is called the taxicab metric because itresembles the distance traveled by a taxicab taking the shortest possible route in a citywith a grid of two-way streets.
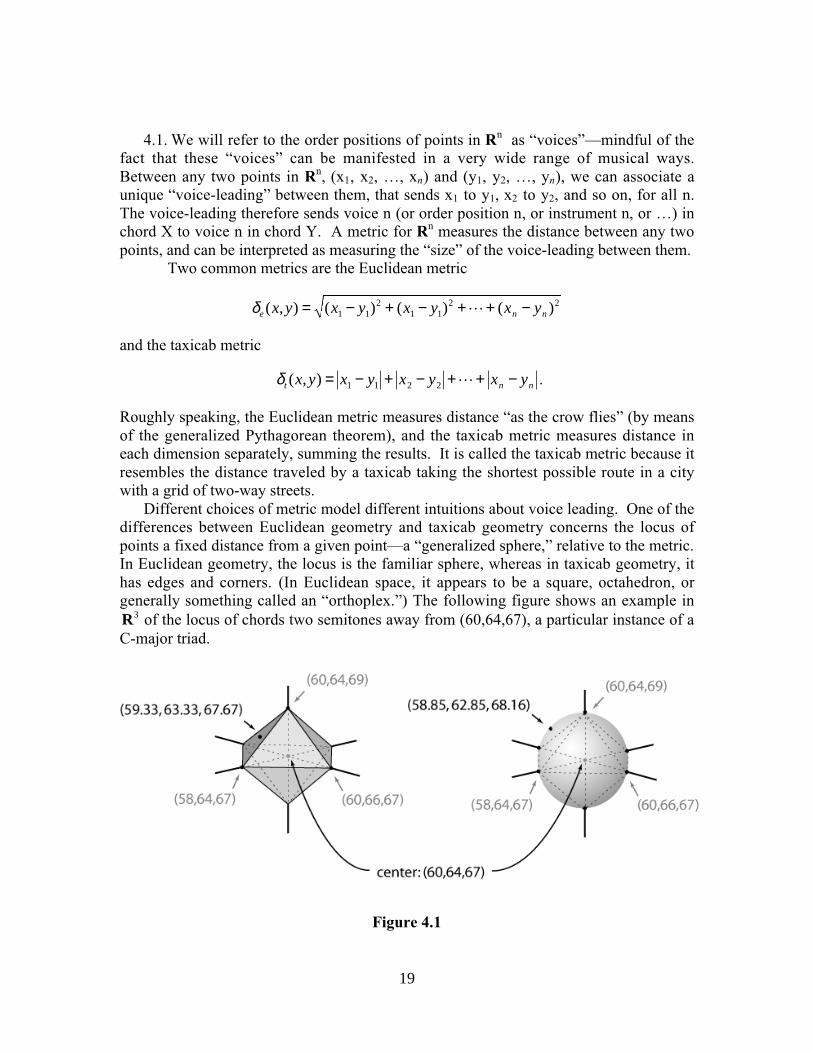
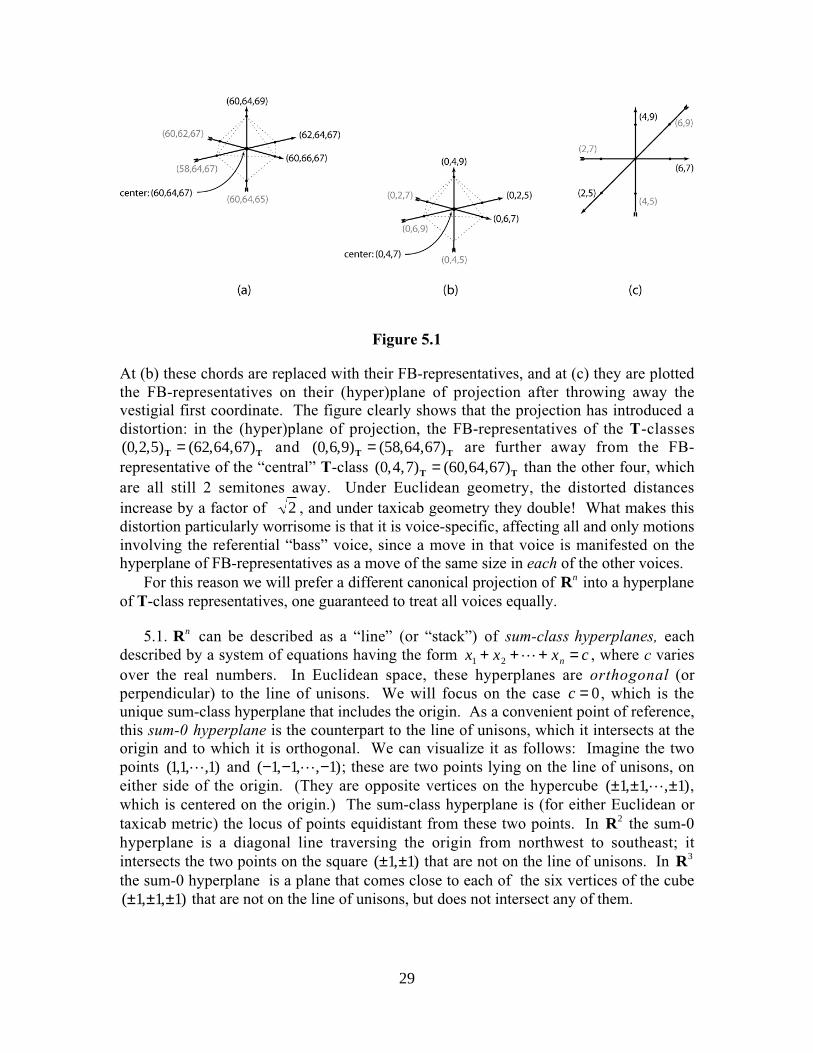
Different choices of metric model different intuitions about voice leading. One of thedifferences between Euclidean geometry and taxicab geometry concerns the locus ofpoints a fixed distance from a given point—a “generalized sphere,” relative to the metric.In Euclidean geometry, the locus is the familiar sphere, whereas in taxicab geometry, ithas edges and corners. (In Euclidean space, it appears to be a square, octahedron, orgenerally something called an “orthoplex.”) The following figure shows an example inR3 of the locus of chords two semitones away from (60,64,67), a particular instance of aC-major triad.
Figure 4.1
20
In taxicab geometry, this includes all chords that can be reached by moving one voicetwo semitones, two voices one semitone each, one voice 1.5 semitones and another 0.5semitones, and so on--the idea is something like “among the three voices, two semitones’worth of motion occurs.” These chords are found on the surface of a regular octahedronwith side 4 (in taxicab geometry) and with (60,64,67) at its center. In Euclideangeometry, on the other hand, the locus of chords two semitones away forms a sphere ofradius 2 (in Euclidean geometry), which is the smallest sphere that encloses theoctahedron just discussed. The two geometries agree about the six cases in which onlyone voice moves, located at the vertices of the octahedron, but in all other casesEuclidean geometry seems to allow “more” motion in most cases, at least relative totaxicab geometry. The discrepancy is maximal for cases in which all voices move anequal distance, an example of which is shown in the figure. Musically, the Euclideanmetric asserts that distances moved by individual voices do not add linearly: the morevoices are moving, the less each motion contributes to the calculation of overall distance.This feature has a natural perceptual interpretation: the more voices that are moving, theless each additional voice contributes to the overall sensation of motion.24
Different theorists have favored different ways of measuring voice-leading size.The issue is a complicated and subtle one. We will return to it in greater detail below.
4.2. Having explored the raw space Rn , let us take up the question of octaveequivalence. We have already seen that R1 has the structure of a line and that R O1 / hasthe structure of a circle whose circumference under our conventions, is 12; we have alsoseen that R O1 / is the quotient of an action of the group Z on R1 generated by theidentification x x~O +12.
Consider now the effect of octave equivalence on the plane R R R2 1= × . Twoidentifications generate this equivalence:
( , ) ~ ( , )
~ ( , )
x x x x
x x1 2 1 2
1 2
12
12O
O
++
These identifications correspond to an action of the group Z Z× (or Z2) on the space.The effect is to wrap the space around itself in each of its two dimensions. In three-dimensional space, we can represent a torus as the (curved) surface of a donut. Note,however, that the curvature of this space is an extrinsic feature. It is perfectly consistentto speak of a “flat” torus with Euclidean metric—even though these surfaces cannot beembedded in 3-dimensional Euclidean space.
At the beginning of the last paragraph we used a curious notation meant to highlight aparticular instance of the general fact that R R Rn n= ×−1 . A useful way to grasp themeaning of this and other product spaces is to read it as “ Rn is a Rn−1 of lines.” Forinstance, the plane (R2) is a line of lines, or the result of replacing every point in a linewith a line. Algebraically, this means that we add to Rn−1 a single linear coordinate.Thus, to form R3, we add a single linear coordinate to R2, expressing the fact that threedimensional space is a plane of lines.
24 For more on these issues, see Callender (unpublished).
21
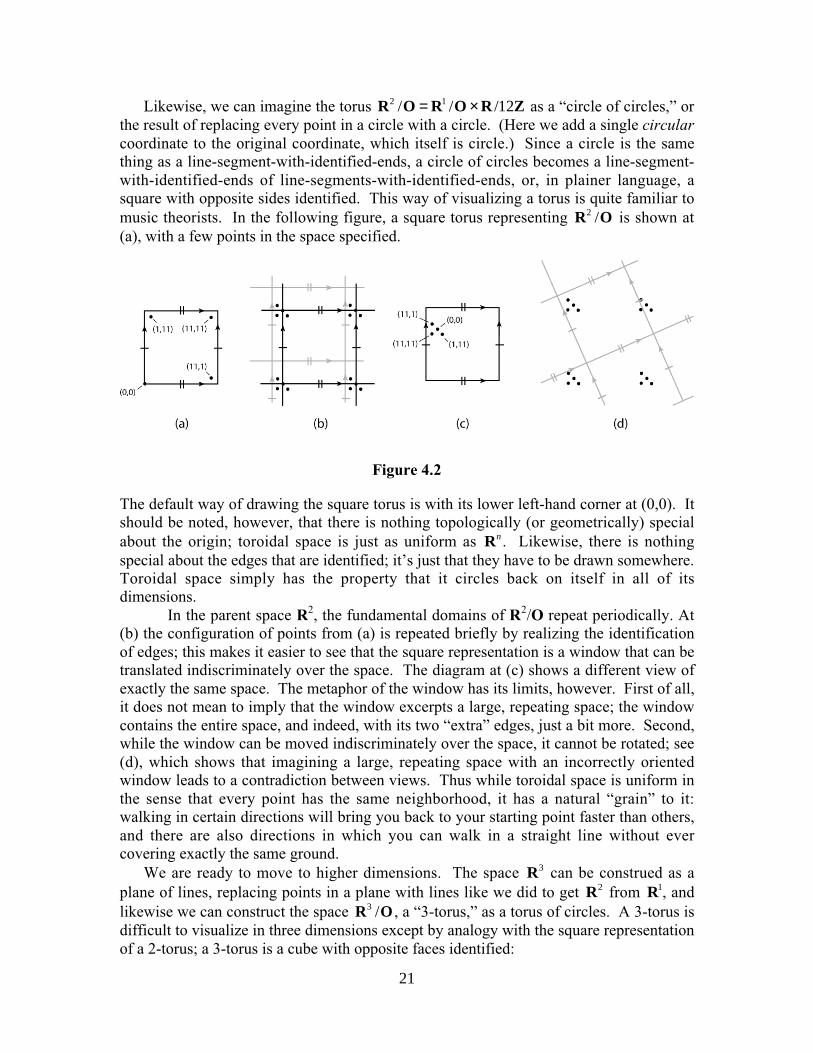
Likewise, we can imagine the torus R O R O R Z2 1 12/ / /= × as a “circle of circles,” orthe result of replacing every point in a circle with a circle. (Here we add a single circularcoordinate to the original coordinate, which itself is circle.) Since a circle is the samething as a line-segment-with-identified-ends, a circle of circles becomes a line-segment-with-identified-ends of line-segments-with-identified-ends, or, in plainer language, asquare with opposite sides identified. This way of visualizing a torus is quite familiar tomusic theorists. In the following figure, a square torus representing R O2 / is shown at(a), with a few points in the space specified.
Figure 4.2
The default way of drawing the square torus is with its lower left-hand corner at (0,0). Itshould be noted, however, that there is nothing topologically (or geometrically) specialabout the origin; toroidal space is just as uniform as Rn . Likewise, there is nothingspecial about the edges that are identified; it’s just that they have to be drawn somewhere.Toroidal space simply has the property that it circles back on itself in all of itsdimensions.
In the parent space R2, the fundamental domains of R2/O repeat periodically. At(b) the configuration of points from (a) is repeated briefly by realizing the identificationof edges; this makes it easier to see that the square representation is a window that can betranslated indiscriminately over the space. The diagram at (c) shows a different view ofexactly the same space. The metaphor of the window has its limits, however. First of all,it does not mean to imply that the window excerpts a large, repeating space; the windowcontains the entire space, and indeed, with its two “extra” edges, just a bit more. Second,while the window can be moved indiscriminately over the space, it cannot be rotated; see(d), which shows that imagining a large, repeating space with an incorrectly orientedwindow leads to a contradiction between views. Thus while toroidal space is uniform inthe sense that every point has the same neighborhood, it has a natural “grain” to it:walking in certain directions will bring you back to your starting point faster than others,and there are also directions in which you can walk in a straight line without evercovering exactly the same ground.
We are ready to move to higher dimensions. The space R3 can be construed as aplane of lines, replacing points in a plane with lines like we did to get R2 from R1, andlikewise we can construct the space R O3 / , a “3-torus,” as a torus of circles. A 3-torus isdifficult to visualize in three dimensions except by analogy with the square representationof a 2-torus; a 3-torus is a cube with opposite faces identified:
22
Figure 4.3
The group acting on R3 is Z Z Z× × , and the action O has the three generatingidentifications
( , , ) ~ ( , , )
~ ( , , )
~ ( , , )
x x x x x x
x x x
x x x
1 2 3 1 2 3
1 2 3
1 2 3
12
12
12
O
O
O
++
+
The general case should be clear enough by now: while Rn is the usual infinite (i.e.,topologically “noncompact”) n-dimensional space, R On / is finite and without-boundary(i.e., topologically “compact” or “closed”) version of that space having the form of an n-torus, which can be imagined either as a circle of circles of ... of circles or as an n-hypercube with opposite “faces” identified. The quotient space derives from an action of Z Z Z× × ×L generated by the identifications
( , , , ) ~ ( , , , )
~ ( , , , )
~ ( , , , )
x x x x x x
x x x
x x x
n n
n
n
1 2 1 2
1 2
1 2
12
12
12
L L
L
M
L
O
O
O
++
+
4.3. We now consider the effect of permutations--reassignments of notes to voices, inthe manner of a generalized voice exchange, on the spaces Rn . Permutationalequivalence (P) is different from octave equivalence (O) by virtue of having fixed points;that is, there are points in Rn that are unaffected by one or more group elements (otherthan the identity) in the action of P. These fixed points are exactly those correspondingto a chord with pitch doublings. For example, the Alberti-bass point (60,67,64,67) in R4
is fixed under one group element in the action of P, specifically the exchange of thesecond and fourth voices. The nearby point (60,67,67,67), on the other hand, is fixed bythe six group elements that do not affect the first voice. Points corresponding toquadrupled pitches, such as (67,67,67,67), are fixed by the entire action. (In general, wewill use the term “P-symmetries” to refer to doublings, triplings, quadruplings, etc.)
Since there are n! ways to assign n notes to n voices, every orbit (set of identifiedpoints) of Rn under the action of P that does not involve fixed points consists of n!distinct points. The fixed points (corresponding to P-symmetric chords) form boundariesbetween n! connected regions of Rn , each of which maps into the others under the actionof P and each of which can stand as a fundamental domain of the quotient space R Pn / .
23
Loosely speaking, then we can understand R Pn / as comprising 1/n! as much space as thecovering space Rn . (There are ways to make this statement mathematically reputable,though it would take us too far afield to discuss them here.) Any fundamental domain ofP can be characterized in terms of the contour of the ordered sets it contains; aparticularly convenient fundamental domain is the locus of ordered sets ( , , , )x x xn1 2 Lwhose notes simply appear in ascending order ( )x x xn1 2≤ ≤ ≤L . This fundamentaldomain is bounded by the n −1 hyperplanes having equations of the form x xi i= +1.
Before considering the quotient spaces modulo P in detail, we need to make somepreliminary definitions. A line of transposition is defined as any of the infinite number ofparallel diagonal lines in Rn comprising voicewise pitch transpositions, and the line ofunisons as the particular line of transposition that passes through the origin (so calledbecause it consists of exactly those points corresponding to “chords” in which everyvoice has the same pitch). The system of equations defining the line of unisons in Rn issimply x x xn1 2= = =L .
Now consider the case n = 2; our formula says that R P2 / consists of 1 1 2n! = asmuch space as R2. The relevant group of permutations is the symmetric group S2, whichis isomorphic to the cyclic group Z2 and every other group of order 2. Since R2 is aplane, the line of unisons (like any line) divides it into two half-planes. These two half-planes are the fundamental domains of the S2 action on R2. That is, the nonidentityelement of S2 under the action P moves every point in one half-plane into the other.Specifically, the motion carried out by that permutation is equivalent to a reflection in theline of unisons. We may therefore construct a model of the space R P2 / by throwingaway either of the half-planes into which the line of unisons divides R2 (it doesn’t matterwhich), and placing a mirror at the line of unisons.
Our next step is the case n = 3; now our formula tells us that R P3 / consists of1 1 6n! = as much space as R3. The figure below shows that the canonical fundamentalregion, bounded by two (hyper)planes intersecting at the line of unisons, takes the formof a wedge when viewed along the line of unisons. Points close to the thin edge of thewedge correspond to chords with notes packed closely together.
Figure 4.4
The relevant group of permutations is the symmetric group S3, which is of order 6 but isnot cyclic; thus the action of the group on R3 corresponds not to sixfold rotation aboutthe line of unisons, but reflection in each of the hyperplane mirrors. One of these
24
reflections exchanges a point’s first and second co-ordinates; the other exchanges itssecond and third coordinates. The two reflections combine to form the full set ofpermutations of three objects, including the two circular permutations, which correspondto 120-degree rotations around the line x1 = x2 = x3. Thus, from the standpoint of P-equivalence, R3 has a threefold rotational symmetry, each section of which has bilateralsymmetry.
The general case follows a pattern that readily suggests itself. The quotient spaceR Pn has the form of an n-dimensional wedge bounded by n −1 hyperplane mirrorsintersecting in n n-flats (1 line, 2 planes, and so on). The wedge’s thin edge runs alongthe line of unisons, and points close to this edge correspond to cluster-type chords.
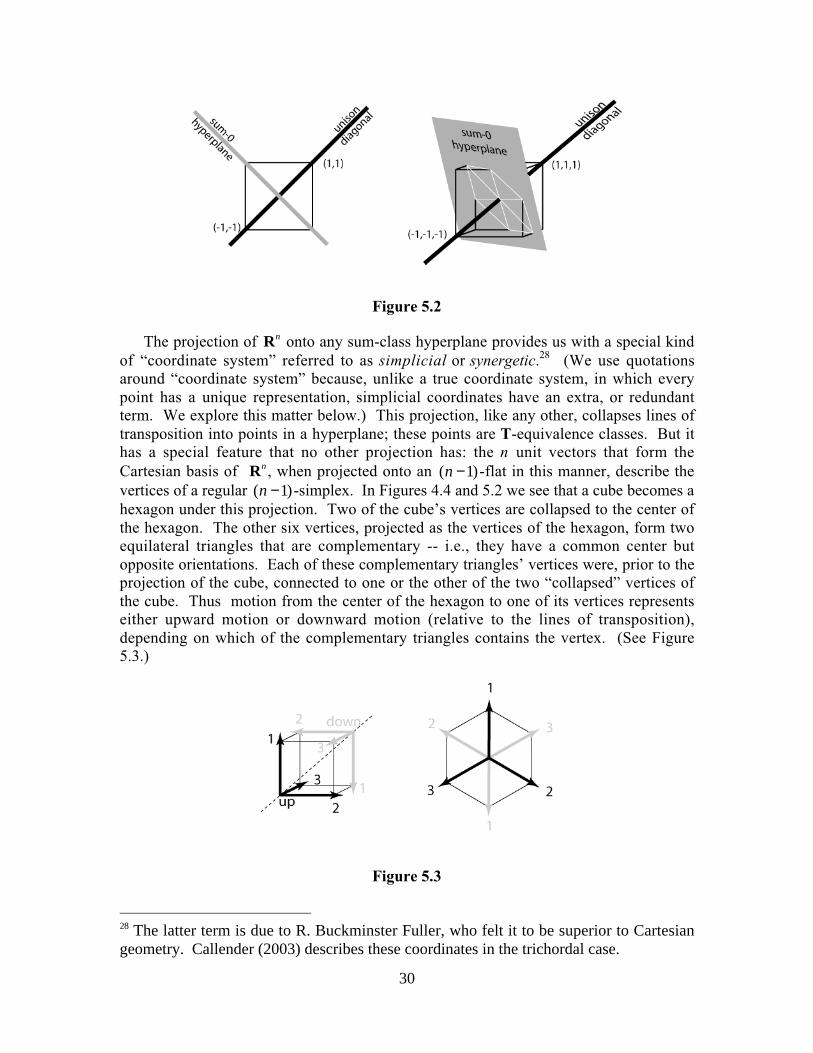
We have seen the effects of O- and P-equivalence individually on Rn ; now let usconsider the question of how they interact to form equivalence classes of unorderedpitch-class sets. The resulting space is very important from a music-theoreticalperspective, as it represents the space of multisets, or unordered chords of pitch-classes.The geometrical models shown in Example 1, including the familiar circle of fifths, thetonnetz, and many others, all represent subsets of these spaces.
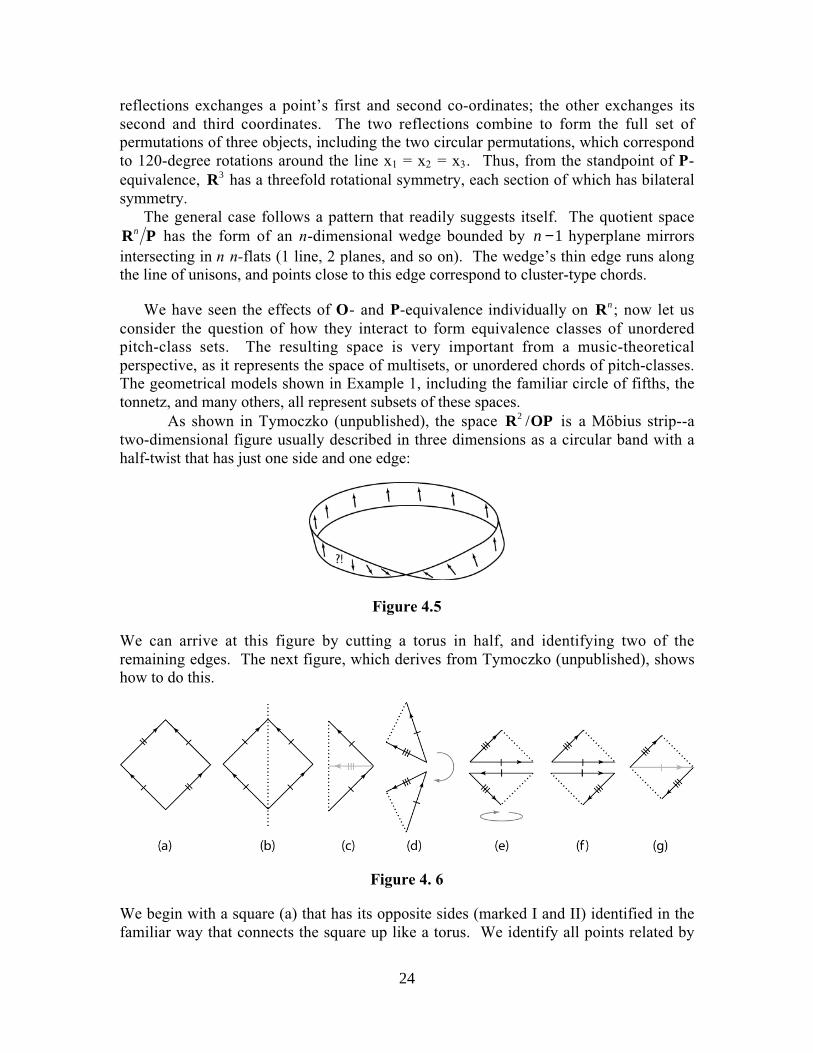
As shown in Tymoczko (unpublished), the space R OP2 / is a Möbius strip--atwo-dimensional figure usually described in three dimensions as a circular band with ahalf-twist that has just one side and one edge:
Figure 4.5
We can arrive at this figure by cutting a torus in half, and identifying two of theremaining edges. The next figure, which derives from Tymoczko (unpublished), showshow to do this.
Figure 4. 6
We begin with a square (a) that has its opposite sides (marked I and II) identified in thefamiliar way that connects the square up like a torus. We identify all points related by
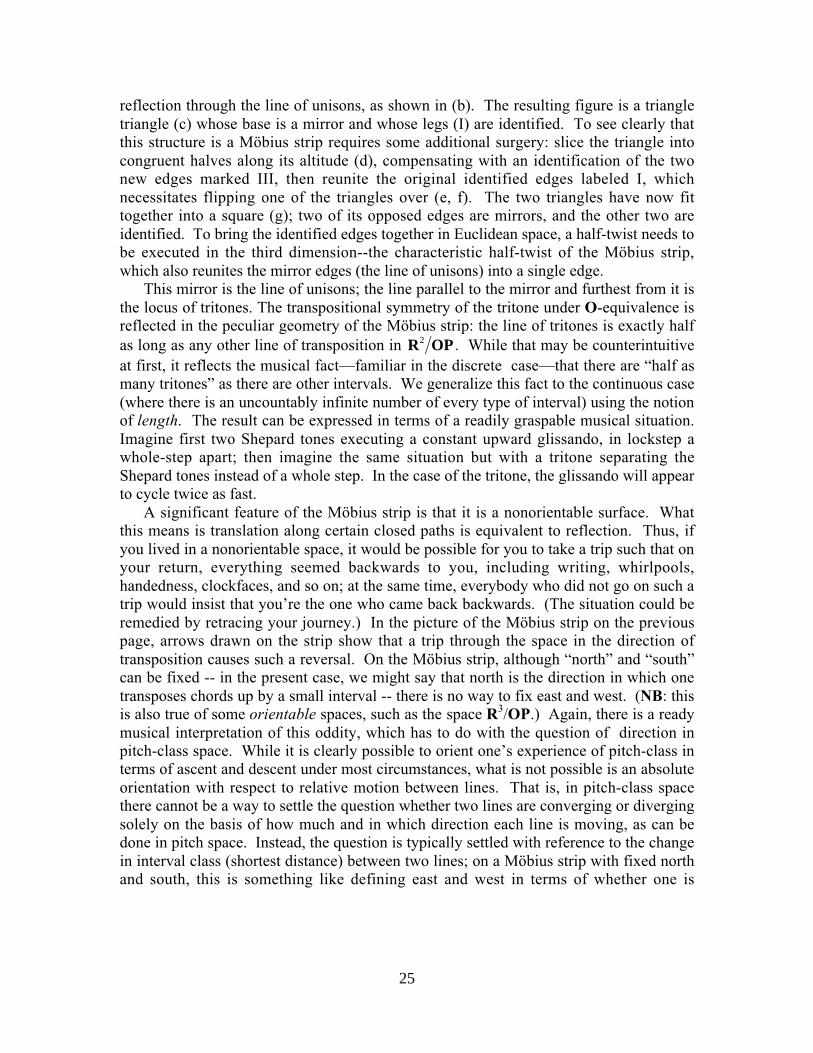
25
reflection through the line of unisons, as shown in (b). The resulting figure is a triangletriangle (c) whose base is a mirror and whose legs (I) are identified. To see clearly thatthis structure is a Möbius strip requires some additional surgery: slice the triangle intocongruent halves along its altitude (d), compensating with an identification of the twonew edges marked III, then reunite the original identified edges labeled I, whichnecessitates flipping one of the triangles over (e, f). The two triangles have now fittogether into a square (g); two of its opposed edges are mirrors, and the other two areidentified. To bring the identified edges together in Euclidean space, a half-twist needs tobe executed in the third dimension--the characteristic half-twist of the Möbius strip,which also reunites the mirror edges (the line of unisons) into a single edge.
This mirror is the line of unisons; the line parallel to the mirror and furthest from it isthe locus of tritones. The transpositional symmetry of the tritone under O-equivalence isreflected in the peculiar geometry of the Möbius strip: the line of tritones is exactly halfas long as any other line of transposition in R OP2 . While that may be counterintuitiveat first, it reflects the musical fact—familiar in the discrete case—that there are “half asmany tritones” as there are other intervals. We generalize this fact to the continuous case(where there is an uncountably infinite number of every type of interval) using the notionof length. The result can be expressed in terms of a readily graspable musical situation.Imagine first two Shepard tones executing a constant upward glissando, in lockstep awhole-step apart; then imagine the same situation but with a tritone separating theShepard tones instead of a whole step. In the case of the tritone, the glissando will appearto cycle twice as fast.
A significant feature of the Möbius strip is that it is a nonorientable surface. Whatthis means is translation along certain closed paths is equivalent to reflection. Thus, ifyou lived in a nonorientable space, it would be possible for you to take a trip such that onyour return, everything seemed backwards to you, including writing, whirlpools,handedness, clockfaces, and so on; at the same time, everybody who did not go on such atrip would insist that you’re the one who came back backwards. (The situation could beremedied by retracing your journey.) In the picture of the Möbius strip on the previouspage, arrows drawn on the strip show that a trip through the space in the direction oftransposition causes such a reversal. On the Möbius strip, although “north” and “south”can be fixed -- in the present case, we might say that north is the direction in which onetransposes chords up by a small interval -- there is no way to fix east and west. (NB: thisis also true of some orientable spaces, such as the space R3/OP.) Again, there is a readymusical interpretation of this oddity, which has to do with the question of direction inpitch-class space. While it is clearly possible to orient one’s experience of pitch-class interms of ascent and descent under most circumstances, what is not possible is an absoluteorientation with respect to relative motion between lines. That is, in pitch-class spacethere cannot be a way to settle the question whether two lines are converging or divergingsolely on the basis of how much and in which direction each line is moving, as can bedone in pitch space. Instead, the question is typically settled with reference to the changein interval class (shortest distance) between two lines; on a Möbius strip with fixed northand south, this is something like defining east and west in terms of whether one is
26
moving from the middle of the strip to its edge or vice versa. Many quotient spacesmodulo octave equivalence turn out to be nonorientable.25
Turning our attention now to the quotient of R3 modulo O and P, we recall that the 3-torus R O3 can be modeled as a cube with identifications (Figure 4.3). To take thequotient modulo P we can take the image of any wedge-shaped fundamental domain of Pin the torus. As Figure 4.4(b) suggests, this is a tetrahedron having two pairs ofcongruent faces. By reasoning analogous to that we undertook in the two-note case, themirrors that bound this tetrahedron reflect the identified walls of the cube onto each otherso that both pairs of faces of the tetrahedron are identified. The result, unlike the two-dimensional case, is an orientable surface,26 which again has a single circular edgeconsisting of the line of unisons. It also has a single face, on which all trichordal pitch-class sets with one degree of P-symmetry (one doubling) are located.
It is one thing to know that R OP3 is a tetrahedron with identifications; it is quiteanother to visualize the identification. The industrious reader who makes a number ofmodels of the tetrahedron and glues them together according to the indicated procedurewill find that the result is a prism whose section is an equilateral triangle. In fact, thetetrahedron itself can be sliced into three pieces and rearranged so as to produce a pieceof this prism, as Figure 4.7 shows.
Figure 4.7
(Alternatively, Tymoczko [unpublished] provides an algebraic proof.) Fanciful though itmay be, this exercise demonstrates, in connection with our earlier discussion of theMöbius strip, a general feature of the R OPn family of spaces. Figure 4.6 showed atriangle with identifications reassembled into a square with identifications; here we havea tetrahedron with identifications reassembled into a prism with identifications. As theidentifications in the Möbius strip require the half-twist that give it a peculiar geometry,so do the identifications on our prism require a one-third twist of the triangular facesbefore they can be joined. This twist is what gives the final product a single face and asingle edge: a path that traverses one edge of the prism will move to another edgefollowing the twisted identification, and to the third after the next twisted identification.Similar observations can be made about paths along the face of this space.
As we prepare to generalize, recall that an n-simplex is an n-dimensional figure withn +1 vertices in which each pair of vertices determine an edge, each triplet of verticesdetermine a face, and so on. A 1-simplex is a line segment; a 2-simplex is a triangle; a 3-
25 In this connection see, e.g., Peck 2003 (“Klein-Bottle Tonnetze”).26 More generally, the spaces Rn/OP are orientable only when n is odd.
27
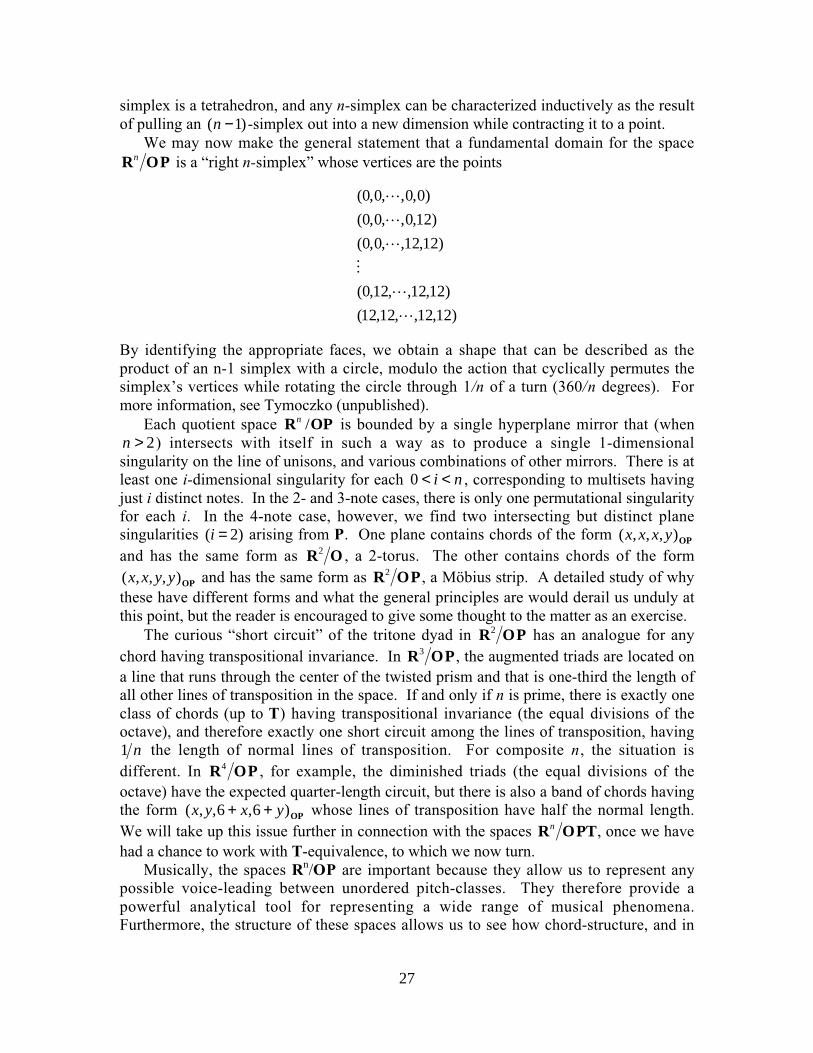
simplex is a tetrahedron, and any n-simplex can be characterized inductively as the resultof pulling an ( )n −1 -simplex out into a new dimension while contracting it to a point.
We may now make the general statement that a fundamental domain for the spaceR OPn is a “right n-simplex” whose vertices are the points
( , , , , )
( , , , , )
( , , , , )
( , , , , )
( , , , , )
0 0 0 0
0 0 0 12
0 0 1212
0 12 12 12
12 12 12 12
L
L
L
M
L
L
By identifying the appropriate faces, we obtain a shape that can be described as theproduct of an n-1 simplex with a circle, modulo the action that cyclically permutes thesimplex’s vertices while rotating the circle through 1/n of a turn (360/n degrees). Formore information, see Tymoczko (unpublished).
Each quotient space R OPn / is bounded by a single hyperplane mirror that (whenn > 2) intersects with itself in such a way as to produce a single 1-dimensionalsingularity on the line of unisons, and various combinations of other mirrors. There is atleast one i-dimensional singularity for each 0 < <i n , corresponding to multisets havingjust i distinct notes. In the 2- and 3-note cases, there is only one permutational singularityfor each i. In the 4-note case, however, we find two intersecting but distinct planesingularities ( )i = 2 arising from P. One plane contains chords of the form ( , , , )x x x y OP
and has the same form as R O2 , a 2-torus. The other contains chords of the form( , , , )x x y y OP and has the same form as R OP2 , a Möbius strip. A detailed study of whythese have different forms and what the general principles are would derail us unduly atthis point, but the reader is encouraged to give some thought to the matter as an exercise.
The curious “short circuit” of the tritone dyad in R OP2 has an analogue for anychord having transpositional invariance. In R OP3 , the augmented triads are located ona line that runs through the center of the twisted prism and that is one-third the length ofall other lines of transposition in the space. If and only if n is prime, there is exactly oneclass of chords (up to T) having transpositional invariance (the equal divisions of theoctave), and therefore exactly one short circuit among the lines of transposition, having1 n the length of normal lines of transposition. For composite n, the situation isdifferent. In R OP4 , for example, the diminished triads (the equal divisions of theoctave) have the expected quarter-length circuit, but there is also a band of chords havingthe form ( , , , )x y x y6 6+ + OP whose lines of transposition have half the normal length.We will take up this issue further in connection with the spaces R OPTn , once we havehad a chance to work with T-equivalence, to which we now turn.
Musically, the spaces Rn/OP are important because they allow us to represent anypossible voice-leading between unordered pitch-classes. They therefore provide apowerful analytical tool for representing a wide range of musical phenomena.Furthermore, the structure of these spaces allows us to see how chord-structure, and in
28
particular the symmetry or near-symmetry of a chord, produces smooth voice-leading.For further details, see Tymoczko (unpublished).
§5. Classification of chord spaces II: T-equivalence.
5.0. The next four classes of space we will study are the same as the first four, butwith the additional complications of transpositional equivalence (T). We saw that O andP represent structurally rather different types of actions--P actions have fixed points andmanifest themselves as mirror boundaries, while O actions have no fixed points andmanifest themselves by wrapping spaces in on themselves. The actions of T arestructurally different from both O and P actions in still another respect: since the basicstructure of Rn involves a continuous model of pitch space, the group of transpositions isitself continuous: for any two transpositions Tx and Ty there is another transposition thatlies “between” them. By contrast O, P, and I correspond to discrete (and in the case of Pand I, finite) groups.
The continuity of T means that whereas Rn modulo O and/or P are n-dimensionalspaces, any quotient space of Rn modulo T is at most ( )n −1 -dimensional. To see whythis is the case, recall our so-called lines of transposition, which are the lines parallel tothe diagonal line of unisons x x xn1 2= = =L . These lines fill the space Rn , and they arethe equivalence classes of T. The quotient space R Tn / , therefore, is such that (in theterminology of section 000) Rn is a “R Tn / of lines.” Since we also know that Rn isR R× −( )n 1 , or a “ R( )n−1 of lines ,” it must be the case that R Tn / has the same topologicalstructure as R( )n−1 .
A more intuitive way to state the same argument begins with the premise that the T-equivalence class of any chord x includes its ( )−x1 -transpose, whose coordinates are( , , , )0 2 1 1x x x xn− −L . Let this latter chord be called the FB-representative of theequivalence class, since it can be interepreted as a figured-bass-like collection of intervalsrelative to the referential “first” note. 27 Clearly every T-class has exactly one FB-representative. The set of all FB-representatives in Rn constitute a single hyperplane, bywhich we mean an instance of Rn−1 embedded “flatly” in Rn (i.e., a point in R1, a line inR2, a plane in R3, and so on). In other words, the mapping of points in Rn to therepresentatives of their T-classes constitutes a projection onto this hyperplane; thisprojection discards one dimension’s worth of information about the structure of Rn . Thediscarded dimension contains information about the specific “bass note” of our figured-bass structures.
While the connection with figured bass makes this particular way of projecting Rn
onto a hyperplane conceptually attractive, it has an unfortunate geometrical side effectthat bears exploration. The following figure shows the chord (60,64,67) and the sixchords that are 2 semitones away under both Euclidean and taxicab geometry (b).
27 Compare Morris (JMTP) and Roeder 1987 (JMT).
29
Figure 5.1
At (b) these chords are replaced with their FB-representatives, and at (c) they are plottedthe FB-representatives on their (hyper)plane of projection after throwing away thevestigial first coordinate. The figure clearly shows that the projection has introduced adistortion: in the (hyper)plane of projection, the FB-representatives of the T-classes( , , ) ( , , )0 2 5 6264 67T T= and ( , , ) ( , , )0 6 9 5864 67T T= are further away from the FB-representative of the “central” T-class ( , , ) ( , , )0 4 7 60 64 67T T= than the other four, whichare all still 2 semitones away. Under Euclidean geometry, the distorted distancesincrease by a factor of 2 , and under taxicab geometry they double! What makes thisdistortion particularly worrisome is that it is voice-specific, affecting all and only motionsinvolving the referential “bass” voice, since a move in that voice is manifested on thehyperplane of FB-representatives as a move of the same size in each of the other voices.
For this reason we will prefer a different canonical projection of Rn into a hyperplaneof T-class representatives, one guaranteed to treat all voices equally.
5.1. Rn can be described as a “line” (or “stack”) of sum-class hyperplanes, eachdescribed by a system of equations having the form x x x cn1 2+ + + =L , where c variesover the real numbers. In Euclidean space, these hyperplanes are orthogonal (orperpendicular) to the line of unisons. We will focus on the case c = 0, which is theunique sum-class hyperplane that includes the origin. As a convenient point of reference,this sum-0 hyperplane is the counterpart to the line of unisons, which it intersects at theorigin and to which it is orthogonal. We can visualize it as follows: Imagine the twopoints ( , , , )11 1L and ( , , , )− − −1 1 1L ; these are two points lying on the line of unisons, oneither side of the origin. (They are opposite vertices on the hypercube ( , , , )± ± ±1 1 1L ,which is centered on the origin.) The sum-class hyperplane is (for either Euclidean ortaxicab metric) the locus of points equidistant from these two points. In R2 the sum-0hyperplane is a diagonal line traversing the origin from northwest to southeast; itintersects the two points on the square ( , )± ±1 1 that are not on the line of unisons. In R3
the sum-0 hyperplane is a plane that comes close to each of the six vertices of the cube( , , )± ± ±1 1 1 that are not on the line of unisons, but does not intersect any of them.
30
Figure 5.2
The projection of Rn onto any sum-class hyperplane provides us with a special kindof “coordinate system” referred to as simplicial or synergetic.28 (We use quotationsaround “coordinate system” because, unlike a true coordinate system, in which everypoint has a unique representation, simplicial coordinates have an extra, or redundantterm. We explore this matter below.) This projection, like any other, collapses lines oftransposition into points in a hyperplane; these points are T-equivalence classes. But ithas a special feature that no other projection has: the n unit vectors that form theCartesian basis of Rn , when projected onto an ( )n −1 -flat in this manner, describe thevertices of a regular ( )n −1 -simplex. In Figures 4.4 and 5.2 we see that a cube becomes ahexagon under this projection. Two of the cube’s vertices are collapsed to the center ofthe hexagon. The other six vertices, projected as the vertices of the hexagon, form twoequilateral triangles that are complementary -- i.e., they have a common center butopposite orientations. Each of these complementary triangles’ vertices were, prior to theprojection of the cube, connected to one or the other of the two “collapsed” vertices ofthe cube. Thus motion from the center of the hexagon to one of its vertices representseither upward motion or downward motion (relative to the lines of transposition),depending on which of the complementary triangles contains the vertex. (See Figure5.3.)
Figure 5.3
28 The latter term is due to R. Buckminster Fuller, who felt it to be superior to Cartesiangeometry. Callender (2003) describes these coordinates in the trichordal case.
31
The advantage of this type of projection is that it preserves many distancerelationships, although there are quirks that result from the factoring-out of transposition.For example, equal motion in the same direction in all three voices is the same as nomotion at all, and equal motion in the same direction in two voices is equivalent to thesame amount of motion in the opposite direction in the third voice. The advantage ofthe resulting coordinate system is that we can use the n coordinates of Rn to label pointsin the ( )n −1 -dimensional R Tn / without working out the trigonometric details. The factthat there is a redundant coordinate can be dealt with by simply ignoring one of them.For example, we could label a trichordal T-equivalence class (0, x, x + y) using any of thecoordinates (x, x + y), (y, x + y), or (x, y). Figure 5.4 shows a small portion of R T3 / ,labeling points by the latter method.
5.2. We are now in a position to dispense relatively quickly with the quotient spacesof Rn modulo T and either O or P. The case of R OTn / is particularly easy, as it istopologically (but not geometrically) identical to R On−1 / . This space takes the form of a( )n −1 -torus, like R On−1 / , but it inherits the simplicial geometry of R Tn / .
R PTn / is only slightly more complicated. Recall that P is an action of Sn on Rn thateffectively slices it into a wedge bounded by n −1 hyperplane mirrors intersecting theline of unisons. In the case of R PTn / , P is still an action of Sn , but this time its domainis effectively R T Rn n/ ≅ −1, which it slices into a wedge bounded by n −1 hyperplanemirrors intersecting the line of unisons. R PT3 / , for example, is a 60-degree slice of theplane R T3 / . We could think of it as a triangle with two infinite sides; likewise, R PT4 /is a tetrahedron with three infinite faces, and R PTn / is an infinitely extended ( )n −1 -simplex. and The following table summarizes the relationships between R Pn / andR PTn / .
We now come to a second very important music-theoretical space: R OPTn / . Whatmakes this space important is the interpretation of its contents: equivalence classes ofchords up to permutation of voices, octave equivalence, and transposition. In otherwords, we have finally reached something like the pcset-class, although we have not yettackled the question of inversion.
Let us begin with some generalities. There are two kinds of singularities possible inthe quotient spaces R OPTn / . The first kind arises from doublings among voices, orpermutational symmetries. These lie on hyperplane mirrors and intersections of these,which are familiar as the boundaries of the wedge-shaped spaces R Pn / , R OPn / , andR PTn / .
32
The second kind arises from transpositional invariance of chords, a property that isdependent upon octave equivalence.29 The formations these singularities take are highlycardinality-dependent, the general rule being as follows: For every prime factor p of nother than 1 there is one singularity in the form of a ( )n p −1 -flat containing all and onlychords that can be partitioned into instances of a p-fold equal division of the octave; allare transpositionally invariant.30 The following table shows all the possibilities for smallcardinalities:
A brief inspection of the table should suffice to show that the dimensionality of thesingularity corresponding to each type of transpositionally invariant chord is tied to thenumber of degrees of freedom that type has, which is in turn tied back to the numericalproperties of n. The two types of transpositionally invariant hexachord, for example, are(a) those containing two copies ( , , )0 4 8 OPT and (b) those containing three copies of( , )0 6 OPT . The singularity in R OPT6 / consisting of type-(a) TINV hexachords hasprecisely the same structure as R OPT2 / , each hexachord ( , , , , , )0 4 4 8 8x x x+ + OPT
corresponding to the dyad ( , )0 3x OPT . Likewise, the singularity consisting of type-(b)TINV hexachords has precisely the same structure as R OPT3 / , each hexachord( , , , , , )0 6 6 6x y x y+ + OPT corresponding to the trichord ( , , )0 2 2x y OPT . These twosingularities intersect at exactly one point, ( , , , , , )0 2 4 6 8 10OPT , which is not onlytranspositionally invariant, but also the maximally even set of cardinality 6.
Generalizing the foregoing observations about hexachords, we observe for any primefactor p of an integer n , there is a singularity in R OPTn / containing thosetranspositionally invariant chords that can be characterized as the “Boulez product” of thep-fold equal division of the octave with some chord of cardinality n p. This singularityhas the same global structure as R OPTn p , possibly possessing singularities of its ownbut otherwise locally resembling a ( )n p −1 -flat. The intersection of any two TINVsingularities corresponding to prime factors p and q is a ( / )n pq −1 -flat.
Let us now see how these generalities play out in the case of trichords. The spaceR PT3 / , as we have seen, can be described as a 60-degree wedge of the plane bounded bymirrors. This is equivalent to observing that the space is a plane with three singularities:two hyperplanes (lines in this case) and one corner at which they intersect. Eachhyperplane contains mostly dyads-with-doublings. On one hyperplane we find dyadswith the lower note doubled, and on the other we find dyads with the higher note 29 The one point in the space R0 is transpositionally invariant in a trivial sense, butotherwise transpositional invariance requires O-equivalence.30 Cohn, “Properties and Generability...,” Quinn diss.
33
doubled. They intersect at a point corresponding to the tripled singleton. Except forthese singularities, which bound the space on two sides, the space locally resembles aplane at every point.
Suppose we now identify octave-equivalent points. Locally the space will continue toresemble a plane (just as, for example, a torus does), but its global structure changessignificantly. These changes concern the two classes of singularity: permutational andtranspositional. The permutational singularities, the two hyperplanes (lines) of doublednotes, are themselves identified, since chords with their lower notes doubled areidentified with chords having doubled higher notes. For example:
Thus in R OPT3 / the images of all dyads-with-doublings are located on a single line,with their specific locations determined by the ordered pc interval from the doubled noteto the other note.
So these lines, which meet at a 60-degree angle at the origin (a corner singularity), arethe same line, which has finite length, and which is the only boundary of the space. It hasthe structure of a circle with one corner “pinched” into it, the shape of a teardrop.
So much for the permutational singularities; let us consider the transpositionalsingularities. According to our earlier observations, since the only prime factor of 3greater than 1 is 3, there is just one transpositional singularity, and since 3 3 1 0− = , ittakes the shape of a 0-flat: a point. This is, of course, the point ( , , )0 4 8 OPT . Because ofthis chord’s threefold symmetry, the neighborhood of the point singularity contains justone-third of the usual amount of space; thus it is a cone point that gives triple vision tothose standing before it.
The space R OPT3 / , then, is a 2-dimensional surface with a single teardrop-shapedboundary and a cone point. The following figure shows that Callender’s (2003) kite-shaped trichord space, subjected to an identification of its short lets, rolls up into justsuch a shape. When looking at the figure it will be useful to keep the following threeidentities in mind:
( , , ) ~ ( , , )
( , , ) ~ ( , , )
( , , ) ~ ( , , )
0 5 5 0 0 7
0 6 6 0 0 6
0 7 7 0 0 5
OPT OPT
OPT OPT
OPT OPT
34
Figure 5.4
Notice that while Callender’s kite seems to have four edges, the space it represents hasjust one, the teardrop-shaped locus of dyads-with-doublings. The lines that connect thetwo tritone points to the augmented triad are identified and therefore the same; in fact,neither the tritone nor the other points on the line that runs to the augmented triad in thekite representation, including ( , , )0 2 7 OPT , are special at all, and do not represent aboundary or any kind of singularity in the space. In fact, a flat representation of the spacecan be made from the three-dimensional representation can be made by making a cutfrom any point on the boundary to the singularity at ( , , )0 4 8 OPT , identifying the cut edges,and flattening the resulting figure:
Figure 5.5
Such a representation is geometrically just as accurate as the kite, or the wide triangle thatresults from making the cut from the origin to ( , , )0 4 8 OPT . There is, however, a handy (ifsuperficial) feature that only the kite-shaped and triangular representations have, which isa bilateral symmetry corresponding to the inversional relationship between one half of thespace (marked R in an earlier figure) and the other (marked I). This inversionalrelationship is of no consequence to the structure of any of the OPT spaces, but willbecome quite important when we take up I-equivalence in part 6 of this paper.
Another interesting perspective on smooth voice leading possibilities among trichordtypes is afforded by surveying the view from the singularity ( , , )0 4 8 OPT . Someonestanding at that point might imagine that the space looks like Figure 5.6, which is derived
35
from the space’s extrinsically conic manifestation by viewing it from a point outside thespace above the cone point. In this perspective, ( , , )0 4 8 OPT is at the center of the action,and not sticking out on sime kind of point at the periphery of the space. Because( , , )0 4 8 OPT is a singularity having only 120 degrees of space around it, we have to bendthe lines to get them to join up as they are supposed to. But since the actions thatgenerate this space all preseve local distances, there is not any “real” curvature in theneighborhood of any point outside the singularity. Instead, an observer standing near asingularity like ( , , )0 4 8 OPT will see multiple copies of herself and of everything in herneighborhood. (In this space, she will ordinarily see two additional copies of herself suchthat all three of her are standing at the vertices of an equilateral triangle whose centroid isthe singularity.)
Close to the singularity are the triads ( , , )0 3 7 OPT and ( , , )0 4 7 OPT , whose proximity tothe nearby cone point is well known to be an important source of the properties studiedby neo-Riemannian theory. The line of “inversional symmetry” runs horizontallythrough the center of the figure. T-equivalence classes can be linked to themselves bysmooth voice-leading to the extent that they are close to either the maximally even set( , , )0 4 8 OPT or the mirror boundary containing duplications. (For example, a C-major triadcan be smoothly voice-led to an E-major or A-flat-major triad, and any chord containinga semitone can be smoothly voice-led to another instance of itself by exchanging thevoices that are a semitone apart.) T-equivalence classes close to the horizontal line ofinversional symmetry can be linked to their inversions by smooth voice-leading.31
Figure 5.6
The analogous space for tetrachords, R OPT4 , is as closely related to Cohn’s (2003)tetrahedral model as the trichord space is to Callender’s triangular model. Let us reviewthe structure we expect to find in this space. Locally, it ought to resemble 3-dimensionalspace with a simplicial geometry. It should be bounded by a single plane containingtetrachords-with-doublings, and this plane should wrap in on itself so as to intersect withitself at the origin, where it looks like a corner of three planes. What look like three linesof intersection at the origin are actually two, one for twice-doubled dyads of the form( , , , )x x y y OPT and one for tripled dyads of the form ( , , , )x x x y OPT . The line of twice- 31 For a generalized algebraic proof of these statements, see Tymoczko (unpublished).
36
doubled dyads ends in a mirror and has the structure of R OPT2 , and the line of tripleddyads loops back on itself like the edge of R OPT3 . The remaining permutationalsingularity is the simplest one: the quadrupled singleton at the origin.
The situation we have just described, unfortunately, cannot actually be represented inthree dimensions without recourse to identifications, much like the 2-dimensional spaceR OPT3 requires a third dimension in which to wrap around and resolve theidentifications. (Or, more familiarly, the way the humble 1-dimensional circle requires asecond dimension in Euclidean space.) Unfortunately, even if a fourth dimension wereeasily available, it would not help us understand even the 2-dimensional boundary ofR OPT4 . As the edge of R OPT3 was a circle pinched once at the origin to form acorner, the edge of R OPT4 is an oddly behaved nonorientable 2-dimensional surfacecalled a projective plane. (A projective plane, unlike a Möbius strip cannot berepresented in three dimensions; therefore even a fourth Euclidean dimension would nothelp us depict R OPT4 .) The figure below shows a triangular surface with the necessaryidentifications. All three corners of the triangle are identified; they represent the origin.The two halves of the rightmost edge of the triangle are identified by folding themtogether. Finally, the surface is closed by identifying the two remaining edges inopposite directions: this is the part that cannot be done in “normal” space. One way toimagine this operation as folding the leftmost vertex of the triangle into the newly foldedcorner on the right, but with a vertical twist that is necessary to line up the pointsproperly. Even though it is difficult to imagine how the operation is completed, theexercise is sufficient to demonstrate that from the point of view of the origin, R OPT4
looks like a 3-sided wedge, just like R PT4 , and that this wedge has one 2-dimensionalboundary and two 1-dimensional boundaries. (The dashed lines in the figure are forreference only; they do not indicate additional creases or singularities.)
Figure 5.7
Despite the strange way in which this triangular boundary is twisted, its interior isnothing other than the double tetrahedron discussed by Cohn (2003) in connection withnoninvertible tetrachord-classes. The duplications Cohn notices in his tetrahedral model
37
were a source of some concern; by this point in our work it should be clear that they aresimply a manifestation of Cohn’s attempt to depict the structure in three-dimensionalEuclidean space.
As for the transpositional singularities, we expect to find here a line singularitycontaining tetrachords of the form ( , , , )0 6 6x x+ OPT and having the same structure asR OPT2 , a line segment with mirrors at its two ends, ( , , , )0 0 6 6 OPT and ( , , , )0 3 6 9 OPT .Note that ( , , , )0 0 6 6 OPT is at the end of two distinct line singularities: a corner singularityof permutational provenance, and a radial singularity resulting from transpositionalsymmetry. Most points on the corner singularity have order-4 symmetry, and most pointson the radial singularity have order-2 symmetry; their common point ( , , , )0 0 6 6 OPT hasorder-8 symmetry.
We also observe that in the geometric conception we have been building up here, thetranspositional singularity takes the form of a line segment beginning at the point( , , , )0 0 6 6 OPT on an exterior corner of the space and pointing into the interior. Thus while( , , , )0 3 6 9 OPT appeared on one of the edges of Cohn’s tetrahedron, it seems to be buried inthe middle of our space. But just as ( , , )0 4 8 OPT is both “in the middle” of R OPT3 withrespect to that space’s boundary and “on the outside” thanks to the way its symmetryseems to bend its space, and there are ways of representing the space that correspond toeach point of view, so is it possible -- even desirable -- to conceive of ( , , , )0 3 6 9 OPT on theoutside; indeed, on Cohn’s double tetrahedron, it lies on an edge formed by two planesmeeting at the 90-degree angle characteristic of the chord’s fourfold symmetry.
To sum up our rather bewildering exploration of R OPT4 , we would like to reiteratethat the space can be completely described in terms of its “parent space” R PT4 and thesingularities that arise under O-equivalence. The parent space has a fairly simplestructure: a structurally homogeneous interior of 3-dimensional space with a simplicialgeometry, bounded by three mirror (hyper)planes intersecting at the origin and containingall 4-voice chord types that have doublings. Things get decidedly more complicatedwhen we add O-equivalence. The boundary wraps in on itself completely, so that thethree planes become a single surface; in addition, the three lines that provided the edgesof the wedge in R PT4 reduce to two. Finally, the closure of the space under O inducessingularities on the interior thanks to transpositional invariance. We noted somesimilarities in structure between, on the one hand, boundary (permutational) singularitiesand internal (transpositional) singularities areas of R OPT4 and, on the other hand, otherPT- and OPT-spaces.
Alternatively, we can describe the spaces Rn/OPT as the quotients of n-1 dimensionalsimplexes by the action that cyclically permutes their vertices. This description showsthat they represent projections of the spaces Rn/OP (the space of sets) onto a hyperplane,just as Rn/T is a projection of Rn onto a hyperplane. However, we will defer furthergeneralization about OPT-spaces until after our study of I-equivalence, to which we nowturn.
38
§6. Classification of chord spaces III: I-equivalence.
6.0. Having discussed O, P, and T, we now turn our attention to the eight spaces thatincorporate I. The first five spaces to be discussed in this section have been selected fortheir potential to explain the geometric nature of inversional equivalence and to set up themost abstract yet familiar of our spaces, R OPTIn / , the space of pcset-classes. Theremaining three spaces are rather esoteric and are reserved for the end of this section.
As we have seen in §3.4, the space of one-note chords under Ic-equivalence, R I1 / c,is a half line bounded by a single mirror point at c / 2. This space is the quotient of R1
modulo the action of Z2 generated by the identification x c xc
~I − . As we have alsoseen, this action is the function Ic x c x( ) = − .
From this one-dimensional space we can observe a property of Ic that generalizes tohigher-dimensional cases: the quotient of R1 modulo Ic is a half space. A half-space isobtained by discarding the space that lies to one side of a hyperplane. In the case of theaction of Ic on R1, the hyperplane is simply the point c / 2, which divides the infinite lineinto two rays, or half lines. Discarding one of these half-spaces yields the space R I1 / c.
This highlights an important difference between I and the other equivalences. Everypoint of R On / or R Tn / is an equivalence class that contains an infinite number ofmembers. One consequence of this is that given a fundamental region of either space,there are an infinite number of copies of this fundamental region in R n . For example, R2
can be tiled by an infinite number of 12 x 12 squares each of which can serve as afundamental domain of O in the plane. Likewise, R n contains an infinite number ofsum-class hyperplanes. In contrast, the typical P-equivalence class contains 1/n!members, corresponding to the number of permutations of n objects. R n is packed by n!copies of the fundamental region of R Pn / , which agrees with our intuition that R Pn /contains 1/n! as much space as R n (with the necessary caveat that this is, technicallyspeaking, merely a useful fiction). The typical Ic-equivalence class contains exactly twoelements: the original point, x, and it’s inversion, Ic x( ). In R I1 / c, every point c x/ 2 + isan equivalence class containing the pitches c x/ 2 + and c x/ 2 − ; the sole exception is thefixed point at c / 2, which contains only a single member. Thus in the general case, weexpect that the quotient R n modulo Ic will be in some sense half of R n .
This hypothesis is applicable to the other spaces of §4-5 modulo Ic. Let E be anequivalence class of some combination of O and/or P and/or T. The equivalence classxE (where x is any chord) is Ic-equivalent to one and only one E-equivalence class,namely, ( ( ))I x Ec . Since the vast majority of E-classes will not remain fixed by Ic, weagain expect that the quotient R En / modulo Ic will be in some sense half of R En / .
6.1. Ic acts on dyads by a combination of its action on the individual voices of thedyad:
I I Ic c cx x x x c x c x( , ) ( ( ), ( )) ( , )1 2 1 2 1 2= = − − .
Geometrically we can interpret this action as a reflection in the plane x c1 2= / , whichsends voice x1 to c x− 1, followed by a reflection in the plane x c2 2= / , which sends thevoice x2 to c x− 2. (See Figure 6.1.1(a).) However, the combination of these tworeflections lines in the plane is equivalent to a reflection in the point at which the lines
39
intersect. In this case, we can see that Ic acting on R2 corresponds to a reflection in thepoint ( / , / )c c2 2 , which we will refer to as the inversion point. The inversion point forany inversion will lie on the line of unisons.
y = c/2
x = c/2
(c/2, c/2)
(c - x 0, c - y 0)
(c - x 0, y 0)(x 0, y 0)
(c/2, c/2)
x = c/2
(a) (b)
(c)
Figure 6.1.1
Any half plane bounded by a line passing through the inversion point is afundamental domain of the action of Ic on R2. For example, take the half plane boundedby the line x c= / 2, shown in Figure 6.1.1(b). Clearly any point on the right of this linehas an Ic-equivalent mate on the left, since this was one of our two mirrors in Figure6.1.1(a). To obtain the quotient space R I2 / c from this fundamental domain, we mustidentify points on this line with their reflection in the inversion point, as indicated inFigure 6.1.1(b). Joining the two halves of the boundary line yields an infinite cone with acone point at the inversion point, the single fixed point for Ic. (See Figure 6.1.1(c).)Note that there is nothing special about the line x c= / 2. This line is transformed into ahalf line bounded by the inversion point just as every other line in R2 that passes through( / , / )c c2 2 . We simply choose one of these lines to serve temporarily as a boundary of ahalf plane. Once Ic-equivalent points on this line are identified, the temporary half spaceboundary vanishes. Try as we might, we cannot tell by examining Figure 6.1.1(c) exactlywhich line served this temporary, though useful, purpose.
40
That R I2 / c is a cone should not be surprising, since in two dimensions reflection in apoint is equivalent to a two-fold rotation about this point, and we have already seen thatR OPT3 / , which possesses three-fold rotational symmetry about the equivalence class ofmaximally-even sets, ( , , )0 4 8 OPT, is also a cone. The cone point of R I2 / c differs in twoimportant ways from that of R OPT3 / . First, since the former arises from a two-foldrotation and the latter a three-fold rotation, we intuitively suspect that the neighborhoodabout the former is in some sense “larger” than the latter. We can buttress this intuitionwith some precision: Take a disk of radius r centered on p, which has an area of A.32
Transforming this disk into a cone by two-fold rotation reduces the area by a factor oftwo, A/2. (See Figure 6.1.2(a) and (b).) A similar transformation by three-fold rotationreduces the area by a factor of three, and so on. It is in this sense that the neighborhoodabout the cone point of R I2 / c is 3/2 as large as the neighborhood about the cone point forR OPT3 / and half as large as the neighborhood about any other point in R I2 / c. In anydimension, neighborhoods about singularities arising from the action of I on a spacealways contain “half as much space,” or content, as these same points in the parent space.This corresponds to our understanding that a chord either possesses inversional symmetryor it does not; unlike transpositional and permutational symmetry, we do not speak ofdegrees of inversional symmetry.33
(a) (b)
Figure 6.1.2
Second, the cone point of R I2 / c is a 0-dimensional mirror, as can be verified bycomparing the path of any line that intersects this point with any path that does not passthrough the inversion point. (See Figure 6.1.3, which gives a “bird’s eye view” of thecone R I2
0/ from directly above the apex.) Any straight path that does not include theinversion point, no matter how close it comes to this point, will continue in a straight line.For example, observe the path (3,1) → (1,0) → (-1,-1) ~I 0
(1,1) → (3,2) as it curlsaround the inversion point. (Despite the curvature as depicted on the plane of the page,
32 Using Euclidean distance, A r= π 2. However, since we are eschewing any particularmetric for the time being, we simply say that the area of the circle under some metric isA.33 Of course, in pc-space there are many sets that remain invariant under multipleinversions. For example, (0,4,8) is invariant under Ix, where x is even. However, this isdue to the sets transpositional symmetry. If a set that possesses I-symmetry does not alsopossess T-symmetry, it will not remain invariant under more than one inversion.
41
this is a straight-line path on the surface of the cone.) Any straight path that does intersectthis point reflects back in the opposite direction in the same manner as any path in R I1 / c
that intersects c / 2. For example, observe the path (2,4) → (1,2) → (0,0) → (-1,-2) ~I 0
(1,2) → (2,4) and so forth, which retraces its steps after reflection off of the mirror point.Observing the behavior of this mirror point in combination with other equivalences isessential in understanding these more abstract spaces and explains much about why theI-spaces are generally less intuitive and more complicated than those spaces without I-equivalence.
x = yx + y = 0
y = 0
x = 0
(0,0)
(3,2)
(1,1)
(3,1)
(1,0)
(2,4)
(1,2)
Figure 6.1.3
Turning to trichords, any point ( , , )x x x1 2 3 in R3 is Ic-equivalent to( ( ), ( ), ( ))I I Ic c cx x x1 2 3 or
Ic x x x c x c x c x( , , ) ( , , )1 2 3 1 2 3= − − − .
We can interpret this as reflections in three different mirrors: x1 = c/2, x2 = c/2, and x3 =c/2, which send the voices x1, x2, and x3 to c – x1 , c – x2, and c – x3, respectively. Similarto the case for R2, the combination of reflections in any these three planes in R3 isequivalent to reflection in the point at which all three planes intersect. Thus, Ic sends anypoint in R3 to its reflection in the point ( / , / , / )c c c2 2 2 , the inversion point for trichords.
Any half space of R3 bounded by a plane passing through the inversion point canserve as a fundamental domain of R3 under Ic-equivalence. Identifying points on thebounding plane with their reflection in the inversion point yields R I3 / c. It is importantto remember that once we identify points on this plane, the boundary it representedvanishes. There are no boundaries in R I3 / c; there is only a single, exceptional point atthe fixed point of the inversion.
42
Generalizing the above for n-note chords, Ic sends any point x = ( , , )x xn1 K toI x I Ic c c nx x( ) ( ( ), , ( ))= 1 K or
I x c xc( ) = − , where c is ( , , )c cK .
This action corresponds to reflections in the hyperplanes x ci = / 2 , 1≤ ≤i n , thecombination of which is equivalent to reflection in the single point of their intersection,the inversion point ( / , , / )c c2 2K .34 We have just seen that R I3 / c consists of an infinitenumber of R I2 / c, which in turn consists of an infinite number of R I1 / c, a line folded inhalf at a single point. The quotient space R In
c/ follows in a similarly recursive fashion:R In
c/ is a half space of R n bounded by a hyperplane containing the inversion point andidentified in the manner of R In
c−1 / , which in turn may be described as a half space of
R n−1 with its boundary identified in the manner of R Inc
−2 / , and so forth. In everyinstance, there is a sole singularity at the inversion point which contains half as muchspace about it as every other point. The oddities of R In
c/ arise largely from this deficitof space about the inversion point.
6.2. We next consider the combination of inversional and permutational equivalenceby observing the action of Ic on R Pn / . This action gives rise to reflection in a particularkind of flat, which, as we shall see, is an important part of the geometry of R OPTIn / ,since it coincides with inversionally-invariant set classes. It is therefore useful to studythese flats in the simplest space in which they arise.
Recall that the space of unordered dyads, R P2 / , is a half plane bounded by a mirrorat x x1 2= , the unison diagonal. The action of Ic on R P2 / glues together points accordingto the identification
( , ) ~ ( , )x x c x c xc1 2 1 2P I P− − .
That is, any member of the first P-class is Ic-equivalent to some member of the second P-class and vice versa. The geometric interpretation of this action is shown in Figure 6.2.1:(a) As we have seen, Ic acts on any ordered dyad by reflection in the inversion point,( / , / )c c2 2 , taking the point ( , )x x1 2 to ( , )c x c x− −1 2 . (b) However, in R P2 / this pathreflects off of the mirror at x x1 2= , which has the effect of permuting the voices of thedyad. This reflection yields the “V”-shaped path leading to ( , )c x c x− −2 1 , the solepermutation of ( , )c x c x− −1 2 . (c) This reflected path is equivalent to the direct (straight)path between these two points, which corresponds to reflection in the line x c x1 2= − orx c x2 1= − (we simply substitute c x− 2 for x1 and c x− 1 for x2), which we will call theinversion flat. (For dyads, the inversion flat is also the sum-c hyperplane, x x c1 2+ = .)Since any point in R P2 / is Ic-equivalent to its reflection in this line, any point on thisline must remain fixed under this reflection, and the inversion flat consists of all and onlythose points in R P2 / that are invariant under Ic-equivalence. These are precisely those
34 Reflection in a point that does not lie on the unison diagonal corresponds to a splittransformation, as discussed by O’Donnell. For example, reflecting (1,2,4,7,9,10) aboutthe point (2,2,2,9,9,9) is equivalent to inverting the first three voices about 2 and the lastthree voices about 9 yielding (0,2,3,8,9,11).
43
dyad classes of the form ( , )x c x− P , since Ic x c x( ) = − and Ic c x x( )− = . Thus, theinversion flat divides R P2 / into two halves. Discarding one of the halves yields thequotient space R PI2 / c, a half space of R P2 / or the quarter plane bounded by mirrors atx x1 2= and x c x1 2= − .
(c - x0, c - y0)
(c/2,c/2)
(x0, y0)
(c - y0, c - x0)
(c/2,c/2)
(x0, y0)x = y
(a) (b)
(c/2,c/2)
(c - y0, c - x0)
(x0, y0)x = c - y x = y
(c)
Figure 6.2.1
That Ic acts on R P2 / by reflection in the line of Ic-invariant P-classes, or theinversion flat, points to a general principle of the action of Ic on any of the spaces fromsections four and five: Ic corresponds to a reflection in the flat of chords or equivalenceclasses of chords that remain invariant under Ic. Therefore, the operative question whenconsidering Ic-equivalence on any space is “Where are the Ic-invariant points?” Oncewe know the answer to this question, we know the precise action of Ic on the originalspace. We have already seen this principle at work in the quotient spaces R In
c/ : there isprecisely one fixed point, A, such that Ic A A( ) = , and R n is transformed into R In
c/ bygluing together points with their reflection in A.
We now proceed to find the inversion flat consisting of points in R P3 / , trichordsunder P-equivalence, that remain invariant by the function
I P Pc x x x c x c x c x( , , ) ( , , )1 2 3 1 2 3= − − − .
44
Suppose an unordered trichord contains the pitch x . In order for this trichord to remaininvariant under Ic, it must also contain Ic x( ), or c x− . So any unordered trichord on theinversion flat must be of the form { , ,?}x c x− . Since we have paired off two Ic-equivalent members of the trichord, the remaining pitch, “?”, must be its own Ic
inversion, and we have already seen that c / 2 is the pitch that satisfies this requirement.Thus the inversion flat consists of all points in R P3 / of the form ( , , / )x c x c− 2 P . In thiscase, the “flat” of inversion is simply a line, since these points can be specified by asingle variable.
To obtain the quotient space R PI3 / c, take a half space of R P3 / (an infinite wedge)bounded by any plane containing the inversion flat and identify points on this boundarywith their reflection in the flat. The result is a half space of R P3 / with its boundaryfolded along the inversion flat, like a book with ( , , / )x c x c− 2 P at its spine.
Since this is the first time we’ve encountered a reflection in something other than ahyperplane or a point, it is worthwhile to take a closer look at the transformation from thewedge of R P3 / to the “half” wedge of R PI3 / c, shown in Figure 6.2.2. We begin withthe infinite wedge of R P3 / bounded by mirrors at x x1 2= and x x2 3= . (a) The cross-section indicated in the middle is where the boundary for the half-space will be placed. Ifthis boundary were a mirror, the resulting space would be the half wedge in (b). Instead,this boundary this boundary will be folded about the inversion flat, shown by a dashedline in (c). As this boundary is folded (d), the permutation mirrors gradually get closeruntil they meet when the identification is complete (e).
x x1 2=
x x2 3=
(a)
(b)
( , , / )x c x c− 2 P
(c)
45
(d)
(e)
Figure 6.2.2
In constructing our “folded” half wedge, we have introduced a fair amount ofdistortion in the graphical representation. In actuality, the mirrors at x x1 2= and x x2 3=are not bent together in three dimensions; we could represent this identification withoutdistortion in a fourth dimension. This is another example of the difference between theextrinsic and intrinsic features of a space, first encountered in §3.1. However, ourrepresentation does clearly show that the wedge R P3 / is transformed into a “folded” halfwedge R PI3 / c without adding an additional boundary. In fact, the transformationreduces the number of boundaries, since the two mirrors are fused into a single boundaryfor the entire space.35
Generalizing the above for arbitrary cardinalities, Ic sends the P-class of x to the P-class of c x− by reflection in the inversion flat, which consists of those P-classes thatremain invariant under Ic. Unordered sets satisfy this condition if for every member, yi ,Ic iy( ) is also a member of the set. For even cardinalities, Ic-invariant unordered sets canthus be partitioned into n / 2 Ic-equivalent pairs, y1 and c y− 1, y2 and y x− 2, and soforth, so that the inversion flat consists of those points of the form:
( , , , , , , )/ /y c y y c y y c yn n1 1 2 2 2 2− − −K P. (1)
For odd cardinalities, Ic-invariant unordered sets can thus be partitioned into ( ) /n −1 2Ic-equivalent pairs plus a single Ic-invariant pitch, c / 2, so that the inversion flat consistsof those points of the form:
( , , , , , , , / )/ /y c y y c y y c y cn n1 1 2 2 2 2 2− − −K P. (2)
Since for either even or odd cardinalities Ic-invariant unordered sets can be specifiedwith n / 2 variables, these sets comprise an n / 2 -dimensional flat.
Any half space of R Pn / , a generalized wedge, bounded by a hyperplane containingthe inversion flat can serve as a fundamental domain of the action of Ic on R Pn / .
35 The reflection of ( , , )x x x1 2 3
in the inversion flat is ( , , )c x c x c x− − −3 2 1. If the first two voices
are equal, ( , , )x x y , then this point lies on the mirror x x1 2= , and its reflection in theinversion flat, ( , , )c y c x c x− − − , lies on the mirror x x2 3= . Since Ic
acts on any point of onemirror by sending it to a point on the other mirror, these two mirror boundaries fuse.
46
Identifying points on this bounding hyperplane with their reflection in the inversion flatyields the desired quotient space, R PIn
c/ . The best intuitive description of this space isa generalized half wedge where, for n > 2, the bounding hyperplanes of R Pn / are“twisted” into coincidence about the inversion flat.36
6.3. Having studied R Inc/ and R PIn
c/ in detail, we already know most of what isnecessary to understand how these spaces combine with T to yield R TIn / and R PTIn / .As we have seen in section §5.0, R Tn / is topologically (but not geometrically)equivalent to R n−1. Thus the action of Ic on R Tn / is essentially the same as the action ofIc on R n−1, which we have already investigated: R In
c−1 / results from identifying points
of R n−1 with their reflections in the inversion point. However, recall that the inversionpoint always lies on the unison diagonal in R n , which is collapsed to a single point, theorigin, upon identifying T-equivalent points. Thus, for any value of c, identifying Ic-equivalent points in R Tn / corresponds to reflection in the origin of R n−1. (This is simplya geometric expression of the well-known fact that all inversions are related by sometransposition.) Since this corresponds to the action of I0 on R n−1, R TIn / is topologicallyequivalent to R In−1
0/ but possesses the simplicial geometry inherited from R Tn / .In the case of dyads, this means that R TI2 / is equivalent to R I1
0/ —a half linebounded by a mirror point at the origin, which is also identical to the quotient spaceR PT2 / . For dyads (and dyads only) under transpositional equivalence, P and I areindistinguishable. That is, it is impossible to tell if the transformation from R T2 / to thespace of Figure 3.1.4(a) is achieved by identifying P- or I-equivalent points, since pairsof points that are equivalent under one are also equivalent under the other.37 Thecommon assertion that all dyads are invariant under inversion relies on an assumption ofboth P- and T-equivalence. One of the benefits of exploring all sixteen combinations ofO, P, T, and I is to tease out these types of assumptions. In this case, since R PT2 / andR TI2 / are the same spaces, we could just as accurately assert that all TI set-classes ofordered pitch dyads are invariant under permutation.
The relation of the quotient spaces R PInc/ and R PTIn / is similarly straightforward.
Recall that collapsing the wedge of R Pn / along lines of transposition yields the wedgeof R PTn / in R n−1. I (or Ic) acts on both types of wedges in exactly the same manner—by reflection in the inversion flat. In R PTn / these flats are identical to those defined in(1) and (2) except that they are flats of I-invariant PT-classes rather than Ic-invariant P-
36 The precise manner in which the bounding hyperplanes of R Pn / are brought intocoincidence is somewhat fussy and complicated. For instance, in R P4 / the mirrors atx x1 2= and x x3 4= are made to coincide by reflection in the inversion flat, but the mirror atx x2 3= is folded onto itself.
37 Another way to see that P and I are indistinguishable for dyadic T-classes is to recallthatI is an action of Z2 corresponding to reflection in a point, while P is an action of Sn
corresponding to reflections in hyperplanes. In the impoverished geometry of R1, eachpoint is a hyperplane.
47
classes.38 Thus R PTIn / is a half wedge that possesses the same relation to R PInc/ as
R PTn / possesses to R Pn / .
6.4. We are now ready to consider OPTI-equivalence and those spaces correspondingto the familiar TI unordered pcset-classes, referred to in the remainder of this sectionsimply as set classes. Proceeding as before, we can obtain the quotient space R OPTIn /by taking a half space of R OPTn / and identifying points under the action of I. Accurateas this may be, we have reached a sufficient degree of complexity in the spaces R OPTn /that this approach is not always helpful in understanding the space of set classes. Forexample, R OPT4 / , the join of a point and a “pinched” version of the real projectiveplane, is difficult enough to comprehend without trying to transform the space by I!Instead, our approach will be to zoom out, so to speak, from the quotient space itself to alarger region that is more directly accessible to our Euclidean intuitions. From this largerregion we will survey the various flats corresponding to chords that are invariant underpermutation, transposition, or inversion before zooming back in to see how this helps usunderstand R OPTIn / .
Figure 6.4.1 is an example of the region we have in mind, which might called thenormal order region of R OT3 / . Students are taught to find a normal order of a pc set bylisting the pcs in “increasing order within the octave.”39 For trichords, this corresponds toa region of R3 in which the pitches are listed in non-descending order, x x x1 2 3≤ ≤ , andall pitches are within 12 semitones of one another, x x3 1 12≤ + . Projecting this regiononto any sum-class plane in the manner discussed in §5.1 yields the region shown inFigure 6..4.1. Thus, any normal ordering of pcs is located somewhere in this region ofR T3 / . Since all normal orderings of a given pcset are related by rotation, this regioncontains all of the cyclic permutations of any point in the region, but none of the otherpermutations. For example, Figure 6.4.1 contains ( , , )0 4 7 OT, ( , , )4 7 0 OT, and ( , , )7 0 4 OT,the three cyclic permutations of a ( , , )0 4 7 T in “close” position, or, interpreting any one ofthe voices as the bass voice of the texture, the three chordal inversions of a major triad.For this reason we will refer to the region in Figure 6..4.1 and its higher-dimensionalanalogues as the cyclic region.
38 For simplicity of notation, we can substitute 0 for c in (1) and (2) when specifying theinversion flat in R PTIn / . To see that this is the case, transpose any P-classes of the formof (2) by −c / 2. Each Ic
-equivalent pair is now x ci − / 2 and c xi/ 2 − . Substituting ′xi forx ci − / 2 , this pair becomes ′xi and − ′xi
. The remaining Ic-invariant pitch is now 0, which it
must be, since Ic acts on any space incorporating T by reflection in the origin.
39 Rahn, p. 33.
48
(7,0,4)OT
(0,4,7)OT
(4,7,0)OT(0,6,6)OT
(0,12,12)OT
(0,6,12)OT
(0,0,12)OT(0,0,6)OT
(0,4,8)OT
(0,0,0)OT
Figure 6.4.1.
Due to the manner in which we constructed the cyclic region, there are only threepoints that are O-equivalent, which are the three vertices of the triangle. Gluing thesepoints together gives the shape of this region on the R OT3 / torus. Indeed, beginningwith the R OT3 / torus and placing mirrors at x x1 2= , x x2 3= , and x x3 1= would giveprecisely this region. Points on these mirrors contain pc duplications and invariant undersome (non-cyclic) permutation. We can also see that the centroid of the cyclic region isthe transposition class of maximally-even sets, which remains fixed under cyclicpermutation.40 This point is not yet a singularity, since we have not yet glued togetherpoints related by cyclic permutation. For now, (0,4,8)OT is merely a latent singularity.
Figure 6.4.2 shows the location of I-invariant sets within the cyclic region, whichform the line ( , , )−x x0 OT and its cyclic permutations ( , , )0 x x− OT and ( , , )x x− 0 OT . Theselines correspond to sets in which two of the voices are positioned symmetrically about aninversional axis that falls on the remaining voice. Notice that each line extends from theminimally even set class through the maximally even set to the member of ( , , )0 0 6 OPTI
that lies on the opposite face of the region. Notice also that these three lines carve thecyclic region into six congruent 30o-60o-90o triangles. Each of the triangular regions isthe quotient space R OPTI3 / : each triangle contains all possible trichordal set classes.The cyclic region must be tiled by six copies of R OPTI3 / , since the region contains allthree cyclic permutations for both a chord and its inversion. Figure 0.2(b) plots the
40 Clough and Douthett (1991) and many other sources use the term “maximally even” todescribe sets like (0,2,4,7,9), which are not strictly even because of the assumed discretedivision of the octave. Since we are operating in continuous pitch-class space, which canbe seen as a limit case of equal temperament as the number of octave divisions, our“maximally even” sets always belong to the special class that Carey & Clampitt call“degenerate well-formed scales” and Quinn (2004) calls “Class IIa ME sets.” The readershould be mindful of this distinction; for example, the centroid of any cyclic region in aquotient space of Rn is always a maximally even set of this special type, and thus is onlya possible chord in c-tone equal temperaments where c is a multiple of n.
49
twelve familiar trichordal set classes (and seven multiset classes) from twelve-tone equaltemperament, which form a lattice on R OPTI3 / .
(x,-x,0)OT
(0,x,-x)OT (-x,0,x)OT
0,6,6
0,12,12
0,6,12
0,0,120,0,6
0,4,8
0,0,0
Figure 6.4.2.
The three boundaries of R OPTI3 / are all mirrors. (If this was not the case, then oneor more boundaries would contain duplications and the triangle would be a fundamentaldomain but not a quotient space.) The boundary extending from (0,0,0)OPTI to (0,0,6)OPTI
is a permutation mirror, while the other two mirror boundaries correspond to inversion.Flipping the triangle about either of these two inversional boundaries yields one of thetwo fundamental domains of OPT for trichords discussed in §5.3. Recall that theCallender kite resulted from cutting the R OPT3 / cone from (0,0,6)OPT to (0,4,8)OPT andthe other fundamental domain resulted from cutting this cone from the origin to the conepoint.41 Combining these two cuts and proceeding in a straight line on the cone from theorigin through the cone point to (0,0,6)OPT on the “back” side of the cone yields thetriangular quotient space R OPTI3 / . Thus, while the triangle has three boundaries, itonly possesses two mirrors: a single permutation mirror along the bottom and a singlemirror on the inversion flat that is “bent” at the maximally-even set class under its three-fold rotational or T4-symmetry.
The various singularities in R OPTI3 / are summarized in the table below. Thecolumns labeled p, t, and i correspond to the degrees of permutational, transpositional,
41 In a later section devoted to R OPTn / and R OPTIn / , we will consider a generalization ofthe latter fundamental domain that may be described as follows: The cyclic region for n-note chords is the (n-1)-simplicial region of R Tn / with n vertices at Ai
n i n= ( )−0 12,T,
0 ≤ <i n. Replacing An−1 with a vertex at the maximally-even set yields a fundamental
domain of OPT in R n. Starting with this fundamental domain, replacing An−2 with a
vertex at (0,0,6,…,6)T yields a fundamental domain of OPTI in R n. This construction isdue to Noam Elkies.
50
and inversional symmetries of a given chord. The column 1/pti indicates the fraction ofspace about the given object in comparison with a typical point in the space. Forinstance, (0,0,3)OPTI lies on the permutation boundary and contains only half as muchspace as (0,3,7)OPTI. We can fit a sufficiently small disk centered on (0,3,7)OPTI with thequotient space, but for a disk centered on (0,0,3)OPTI, half a the disk will be reflected ontothe other half. Notice how this deficit of space is reflected in the geometry of R OPT3 / :( , , )0 0 6 OPTI lies at the 360o/4 = 90o angle, ( , , )0 4 8 OPTI lies at the 360o/6 = 60o angle, and( , , )0 0 0 OPTI lies at the 360o/12 = 30o angle.
Object p t i 1/pti( , , ) ,0 0 0 6x xOPTI < < 2 1 1 1/2
It is tempting but terribly misleading to generalize the very simple space of trichordalset classes to spaces of larger cardinalities. However, in light of the many examples ofcomplicated quotient spaces we have already encountered, it is clear that any naïve hopesof geometric simplicity for the space of set classes must be set aside in order tounderstand the actually spaces these abstract chord types inhabit. Accordingly, we willproceed with a detailed look at the space of tetrachordal set classes, R OPTI4 / , followedby quicker glances at the cases for pentachords, hexachords, and heptachords beforegeneralizing the observed principles.
Figure 6.4.3 shows the tetrachordal cyclic region, a tetrahedron with vertices at(0,0,0,0)OT, (0,0,0,12)OT, (0,0,12,12)OT, and (0,12,12,12)OT. As with the cyclic region fortrichords, the boundaries are mirrors corresponding to P-equivalence other than cyclicpermutations. There are two planes cutting through the interior of this tetrahedral region.These are the inversion flat ( , , , )− −x y y x OT, and its sole unique cyclic permutation( , , , )− −y y x x OT. There are only two unique cyclic permutations of ( , , , )− −x y y x OT, sincethe third cyclic permutation, ( , , , )− −x y y x OT, in which the “outer” and “inner” voicesform I-equivalent pairs, contains the same sets as the first. Thus, since there are only twounique cyclic permutations of the inversion flat, there are only two planes dividing thecyclic region into four subregions. Following the previous discussion of trichords, formost points in the cyclic region, there are seven other points to which a given point isOPTI-equivalent—three related by cyclic permutation and four related by inversion.42
For example, there are eight points in the cyclic region that belong to 0 2 5 8, , ,( )OPTI,
namely, ( , , , )0 2 5 8 OT , ( , , , )0 2 6 9 OT, ( , , , )11 2 5 9 OT , ( , , , )11 3 6 9 OT , ( , , , )11 2 6 8 OT, ( , , , )0 3 6 8 OT ,( , , , )11 3 5 8 T, and ( , , , )0 3 5 9 T, the four chordal inversion of half-diminished and dominantseventh chords. This means that each of the four subregions in Figure 6.4.3 must containpoints that are OPTI-equivalent, which in turn implies the presence of singularitieswithin each of these subregions. Where are these singularities and how do they arise?
42 Points that possess some degree of symmetry will have fewer OPTI-equivalentsiblings in the cyclic region.
51
(0,x,6,-x)
(-x,0,x,6)
(-y,y,x,-x)
(-x,-y,y,x)
(0,3,6,9)
(0,6,12,12)
(0,0,6,12)
(0,0,6,6)
(0,0,12,12)
(0,0,0,6)
(0,6,6,6)
(0,6,6,12)
(0,0,0,0)
(0,12,12,12)
(0,0,0,12)
Figure 6.4.3. The cyclic region in R OT4 / with inversion planes and lines.
Consider trichordal OT-classes of the form ( , , )−x x0 OT , which are invariant underPI-equivalence. We can add a fourth voice a tritone away from the second withoutdisturbing the inversional symmetry, since both pcs remain fixed by the same inversion.(This is a direct consequence of the discussion in §3.5, in which tritone-related mirrorpoints arose from the combination of O and Ic in the context of one-note chords.) Inparticular, tetrachordal OT-classes of the form ( , , , )−x x0 6 OT are also invariant under PI-equivalence. These OT-classes form two lines in the tetrachordal cyclic region of Figure6.4.3. One line corresponds to ( , , , )−x x0 6 OT and contains the equal-tempered OT-classes ( , , , )0 0 0 6 OT, ( , , , ) ( , , , )11 0 1 6 0 1 2 7OT OT= , ( , , , ) ( , , , )10 0 2 6 0 2 4 8OT OT= , and so forth.The other line is the sole unique cyclic permutation of the first, containing OT-classes ofthe form ( , , , )0 6x x− OT .43 These lines correspond to sets that are I-invariant in pitch-classspace but not pitch space. For instance, (0,1,2,7) and (0,2,4,8) are I-invariant under someinversion in pc-space, but this invariance cannot be instantiated in pitch space. Thiscontrasts with sets lying on the planes of inversional invariance in Figure 6.4.3, such as(0,1,6,7), where this invariance can be realized in pitch space.
We will now construct a fundamental domain of OPTI for tetrachords, making surethat the boundaries of this domain contain the appropriate inversion flats, as they must.We begin by taking any of the four subregions of the cyclic region bounded by the two
43 The other cyclic permutations of −( )x x, , ,0 6
OT are identical to one of these two lines for
the same reason that there are only two unique inversion planes in the cyclic region.
52
(mirror) inversion planes. For convenience, we take the subregion with vertices at(0,0,0,0)OT and (0,0,0,12)OT, a tetrahedron whose remaining two vertices are (0,0,6,6)OT
and (0,6,6,12)OT. Since this region contains I-equivalent points related by reflection inthe inversion line ( , , , )−x x0 6 OT , a fundamental domain of OPTI must divide thissubregion into two halves bounded by a plane containing this inversion line. The obviouschoice is the plane that also includes the intersection of the two inversion planes. Takingthe half that contains the origin yields the fundamental domain of OPTI shown in Figure6.4.4.44
(-x,0,x,6)OPTI
M = (0,3,6,9)OPTI
D = (0,0,0,6)OPTI
C = (0,0,6,6)OPTI
B = (0,6,6,12)OPTI���= (0,0,6,6)OPTI
A = (0,0,0,0)OPT
Figure 6.4.4. Fundamental domain of OPTI for tetrachords.
We have just reconstructed Cohn’s tetrahedron, expanded to include multisets. Hisvertex at the minimally-even set class of the 12 pc-universe, [0123], has been replaced bythe corresponding point in a continuous space, the origin. Similarly, his two vertices at[0167], a maximally-even distribution of the smallest interval in the 12 pc-universe, havebeen placed at the corresponding points in a continuous space, (0,0,6,6)O T and(0,6,6,12)OT, and his vertex at [0127] is replaced by (0,0,0,6)OT. The ABD and ACDfaces lie on the boundary of the cyclic region and are thus mirrors. The ABC face lies onthe inversion plane and is also a mirror. However, the BCD face is not a mirror, since itcontains duplicate set classes arranged symmetrically about the inversion line. Theseduplications are the source of much discussion in the final section of Cohn (2003), wherehe suggests “creasing the BCD face along its central column and folding thecorresponding points together.”45 We will now carry out this identification transforming,the fundamental domain into the quotient space R OPTI4 / .46
44 This is only one of many possible fundamental domains of OPTI for tetrachords.45 Since Cohn focuses on the 12 pc-universe, his tetrahedron is a lattice contained withthe tetrahedron of Figure 6.4.4. The number of duplicate set-classes on this lattice are
53
The BCD face folds in half along the inversion line in the manner already discussedin connection with R PI3 / c and shown in Figure 6.4.5(a-b). (In Figure 6.4.5, t = 10, e =11, and m = 12.) The vertices B and C are placed at a single point, B/C = (0,0,6,6)OPTI,but the fold creates a new vertex at the maximally-even set class, (0,3,6,9)OPTI, labeledM. Points on the interior of this face and the boundary that they form vanish into theinterior of the space. Since the remaining faces of the tetrahedron share an edge with thisnow-collapsed face, all are affected by this transformation. Folding the BC edge of theABC face along its midpoint (c) yields a cone (d) with a cone point at M. On this conethere are separate straight-line paths from (0,0,0,0)OPTI to (0,0,6,6)OPTI; one in which twovoices move in parallel, e.g., (0,0,0,0)OPTI → (0,0,1,1)OPTI → … (0,0,6,6)OPTI, andanother in which two voices move in contrary motion, e.g., (0,0,0,0)OPTI → (11,0,0,1)OPTI
→ … (6,0,0,6)OPTI = (0,0,6,6)OPTI. (Readers can verify from Figures 6.4.5(a-d) that theA(B/C)M cone and the DM line contain all I-invariant tetrachordal set classes.)
The remaining two faces, ABD and ACD, are united along their BC and CD edges(e), yielding a second cone (f) with the same two distinct straight paths from A to B/Cand a cone point at D. Putting this all together, the cones in (d) and (f) are united alongtheir shared A to B/C paths, with the inversion line running through the interior attachedto the two cone points (g). (As before, it would be necessary to represent this three-dimensional space in four-dimensional Euclidean space to “see” it without distortions.)
C
(-x,0,x,6)
0127
0238 =0137
0349 =0147
0137
0248045t =0157
0359 =0258
0147
0258
0157
0066
D0006
0016
0026
0036
0046
0056
0167
0268
0369
046t =0268
056e =0167
B 066m =0066
055e =0056 044t =
00460339 =0036 0228 =
0026 0117 = 0016
B/C
(-x,0,x,6)
0127
0248
0066
D0006
0016
0026
0036
0046
0056
0167
0268
M = 0369
(a) (b)
quite limited; in the corresponding continuous space, there are any infinite number ofduplications.46 Indeed, Cohn’s intuition is writ large in the present paper.
54
0156
0257 0145
0358 0246 0134
0459 =0158
0347 0235 0123
0112 =001e
0224 =002t
0336 =0039
0448 =0048
055t =0057
C
B A
066m =0066
056e =0167
046t =0268
M = 0369
0268
0167
0066
0055
0044
0033
0022
0011
000
M
0057 0048 0039 002t001e
0246
0123
B/C
A
0369
0268
0167
0066 0055 0044 0033 0022 0011 000
(c) (d)
D
BA
C
D
0001
0002
0003
0004
0005
0056
0046
0036
0026
0016
0006
0057 0048 0039 002t001eB/C
A0066 0055 0044 0033 0022 0011 0000
(e) (f)
55
0248
0127
0167
0268
0369
0123
0246
M
0000001100220033004400550066A
B/C 001e002t0039
00480057
0006
0016
0026
0036
0046
0056
0005
0004
0003
0002
0001
D
(g)
Figure 6.4.5. Transformating the fundamental to the quotient space R4/OPTI.
Figure 6.4.5(g) is the quotient space R OPTI4 / , which is bounded by two mirrorswrapped into cones, with a single permutation mirror on the bottom, a single inversionmirror on the top, and a line mirror connecting the two cone points. Most of the points onthese two boundaries are singularities whose neighborhood possess half the usual space,but there are numerous singularities that possess a greater deficiency of space about them.The table below summarizes the location and degree of spatial contraction about thesesingularities:
Object Sets of the form p t i 1/pti of ballAD 0 0 0 0 6, , , ,x x( ) < <
OPTI6 1 1 1/6
AB/C 0 0 0 6, , , ,x x x( ) < <OPTI
4 1 2 1/8
AB/C −( ) < <x x x, , , ,0 0 0 6OPTI
2 1 2 1/4
B/CM −( ) < <x x x, , , ,0 6 0 3OPTI
1 2 2 1/4
M ( , , , )0 3 6 9 OPTI 0 4 2 1/8
D ( , , , )0 0 0 6 OPTI 6 1 2 1/12
B/C ( , , , )0 0 6 6 OPTI 4 2 2 1/16
A ( , , , )0 0 0 0 OPTI 24 1 2 1/48
Now we turn to pentachords. For the remainder of this section we will focus on theinversion flat(s) and their relation to the permutation boundary. Since the space about
56
any points in R OPTIn / that are not singularities is identical to R n , focusing on thesesingularities allows us to study the more interesting areas in the quotient space.Additionally, since the inversion flat for up to seven-note chords is only threedimensions, these flats allow us to apply our spatial intuitions to cardinalities as large ofheptachords.
Figure 6.4.6(a) shows the cyclic region for pentachords projected onto the plane as apentagon. (As before, m = 12.) The inversion flat ( , , , , )− −x y y x0 T includes the originand passes through the center of the pentagon.47 This flat intersects the edges connectingvertices arranged symmetrically about the origin at their midpoint. That is,( , , , , )− −x y y x0 T is a two-dimensional (planar) flat that intersects the cyclic region atthree points: the origin, the midpoint of BE, (0,6,6,6,12)T, and the midpoint of CD,(0,0,6,12,12)T. The inversion flat in R OPTI5 / is thus a triangle with vertices at theorigin, the set class of quintuple unisons, and the two unique set classes that correspondto a tritone with pc duplications, (0,0,0,0,6,)OPTI and (0,0,6,6,6)OPTI.
48 (See Figure6.4.6(b), where the reader can verify that this triangle contains all pentachordal set classesthat are I-invariant.) Singularities in R OPTI5 / are found in two places: on the singlefour-dimensional permutation boundary that contains all set classes with pc duplications,and the inversion flat, which attaches to the permutation boundary along the edges of thetriangle. We can imagine placing this triangle directly against the permutation boundary,then grabbing the maximally even set-class, ( , , , , )0 2 3 412
512
512
512
5⋅ ⋅ ⋅ OPTI or( , . , . , . , . )0 2 6 5 2 7 8 9 4 OPTI, and pulling it along with the rest of the interior of the triangle offof the permutation boundary. The inversion flat is thus “bent” around the maximally-even set class under the influence of its five-fold rotational or T12 5 2 6/ .= -symmetry, just aswas the case for the inversion line R OPTI3 / . There are two classes of singularities inR OPTI5 / that stand out from the rest: the maximally-even set class, which possessesboth T- and I-symmetry, and the sets on the edges of the triangular inversion flat, whichpossess both P- and I-symmetry.
47 There are a total of five cyclic permutations of this flat that pass through the cyclicregion, each containing a different vertex of the region. We choose this particular flat forthe obvious reason that it contains the origin.48 Note that these two set classes are not equivalent under the four equivalences we areconsidering. See §2 for a discussion as to why we are not consider “cardinality”equivalence.
57
(-x,-y,0,y,x)OT
0666m
006mm
B = 0000m
C = 000mmD = 00mmm
E = 0mmmm
A = 00000
Figure 6.4.6 (a)
maximally-even set
0159t =01348
0258t =02469
0357t =02479
0456t =01268
01478
02468
03458
01356
02346
012340567m =01277
0468m =02488
0369m =00369
026tm =02248
016em =011270555t
04448
03336
02224
01112
005tt00488003660024400122
0666m =00066
006mm =0000600000
Figure 6.4.6 (b)
It is important to remember that the inversion flat is not a boundary of R OPTI5 / .Though it is a flat that attaches to the permutation boundary, it no more bounds the four-dimensional space of R OPTI5 / than an arc attached to a plane bounds a three-dimensional object. The flat belongs to the category of “radial singularities,” discussedin §5.3.
Jumping ahead to the next odd cardinality, Figure 6.4.7 shows the projection ofthe cyclic region for seven-note chords onto the plane as a heptagon. As before, theinversion flat that passes through the origin, ( , , , , , , )− − −x y z z y x0 OT, intersects the cyclicregion at the midpoints of edges connecting vertices arranged symmetrically about theorigin. The inversion flat in R OPTI7 / is thus a tetrahedron with vertices at the originand those three unique set-classes that are equivalent to a tritone with pc duplications:(0,0,0,0,0,0,7)OPTI, (0,0,0,0,0,6,6)OPTI, and (0,0,0,0,6,6,6)OPTI. This flat attaches to thesingle permutation boundary at the faces of the tetrahedron, which all contain pcduplications. The tetrahedron will be “bent” at the singularity of the maximally-even setclass ( , , , , , , )0 2 3 4 5 612
712
712
712
712
712
7⋅ ⋅ ⋅ ⋅ ⋅ OPTI .
58
(-x,-y,-z,0,z,y,x)OT
00666mm
066666m
0006mmm
000000m
00000mm
0000mmm000mmmm
00mmmmm
0mmmmmm
0000000
Figure 6.4.7. Cyclic region and inversion flat in R7/T.
Generalizing for R OPTIn / , when n is odd, the inversion flat is an n / 2 -simplexwith vertices at the origin and the n / 2 unique set-classes that are equivalent to a tritonewith pc duplications. This simplex is “bent” under the influence of the n-fold rotationalor T n12 / -symmetry of the maximally-even set class, and attaches to the permutationboundary at its facets.49 For prime cardinalities there will be four types of singularities:1) those that lie solely on the permutation boundary; 2) those that lie solely on theinversion flat; 3) those that lie at the intersection of the permutation boundary and theinversion flat; and 4) the maximally-even set. For odd but not prime cardinalities therewill be additional flats corresponding to set classes with T-symmetry, as described in§5.3.
The situation for even cardinalities is much more complicated, as we have seen withR OPTI4 / . We now turn to a brief look at the case for hexachords.
As before, we begin with the cyclic region, shown as a planar projection in Figure6.4.8(a). The inversion flat ( , , , , , )− − −x y z z y x OT passes through two vertices of thehexagon, the origin and the opposite vertex, (0,0,0,12,12,12)T. This flat also intersectsthe cyclic region at the midpoints of two edges, (0,6,6,6,6,12)T and (0,0,6,6,12,12)T.However, notice that the edge connecting A and D itself inversionally symmetric aboutits midpoint (0,0,0,6,6,6)T; e.g., (0,0,0,7,7,7) ~OPTI (0,0,0,5,5,5). In fact, all three cyclicpermutations of this flat intersect at the triangular face with vertices at (0,0,6,6,12,12)T,(0,6,6,6,6,12)T, and (0,0,0,6,6,6)T. Every point in the inversion flat on one side of thistriangle is I-equivalent to a point on the other side. Taking this face with the origin yieldsthe tetrahedron shown in Figure 6.4.8(b). Since this tetrahedron contains duplications(e.g., two of its vertices belong to the same set class), it is a fundamental domain of theinversion flat. In fact, the entire BCD face is divided into I-equivalent halves by the linesegment extending from D to the midpoint of BC as shown in Figure 6.4.8(b). This isexactly the same case as the fundamental domain we constructed for OPTI in R 4 , a
49 Facets are to higher-dimensional objects like simplexes as edges are to polygons andfaces are to polyhedra.
59
tetrahedron with a single face to be folded in half. Thus, the inversion flat in R OPTI6 /will be the same basic shape as the quotient space R OPTI4 / , a rather unexpected resultat first glance.
(-x,-y,-z,z,y,x)OT000666
0066mm
06666m
000mmm
00mmmm
0mmmmm
0000mm
000000
00000m
(a)
(-x,-y,0,y,x,6)OPTI
D = (0,0,0,6,6,6)OPTI
C = (0,6,6,6,6,12)OPTI = (0,0,0,0,6,6)OPTI
B = (0,0,6,6,12,12)OPTI���= (0,0,0,0,6,6)OPTI A = (0,0,0,0,0,0)OPTI
(b)
Figure 6.4.8. (a) cyclic region in R T6 / ; (b) fundamental domain of “pitch-and-pc”inversion flat for hexachords.
What is this line along which the BCD face is folded and where does it come from?Recall that sets of even cardinalities can be inversionally invariant in pc-space withoutbeing I-invariant in pitch space. Hexachords that display pc-only I-invariance are of theform ( , , , , , )− −x y y x0 6 OT . This two-dimensional flat, which we will call the pc-inversionflat, intersects the tetrahedron of Figure 6.4.8(b) at exactly the line along which the BCDface is folded. In other words, this line is the intersection of the pitch-and-pc-inversionflat and the pc-only-inversion flat.
60
Though we have not yet discussed the exact manner in which the inversion flatsattach to the permutation boundary, the manner in which the singularity at the maximally-even set arises, or the other multitude of singularities in this space, our discussion doesgive a general sense of the complexities that arise for even cardinalities. A morethorough examination is presently deferred for a later section specifically devoted toR OPTn / and R OPTIn / .
It is worth taking a moment at the end of our tour the most of the sixteen spaces tosummarize our trip from R n and the space of ordered pitch sets to the space of n-note set-classes. O-equivalent points in R n are identified by a particular action of 12Zn , yieldingan n-torus. P-equivalent points in R On / are identified by a particular action of Sn ,yielding a (n-1)-simplex-based prism with its bases identified by a vertex permutingtwist. T-equivalent points in R OPn / are identified by a particular action of R , aprojection onto any sum-class hyperplane; this action on R OP3 / yields a cone with acone point at the OPT-class of maximally even sets and a mirror boundary at P-invariantOPT-classes; on R OP4 / this action yields the join of the maximally-even set and theprojective plane. I-equivalent points in R OPTn / are identified by a particular action ofZ2, taking xOPT to −xOPT , which yields the triangular space R OPTI3 / and the “doublecone” of R OPTI4 / .50 OPTI-equivalent points in R n are thus identified by a particularaction of the group 12 2Z S R Zn
n× × × .
50 There is nothing unique about this particular trip from R n to R OPTIn / , since the orderin which we take the quotients does not matter.
G D A E B/Cf Fs/Gf
Cs/Df
Af
Ef
Bf
F
Example 0.1(a). The circle of fifths can be interpreted as depicting minimal voice-leadings between diatonic collections (major scales).
...
..
. . ..
...
C{5↔6} {t↔e}
{3↔
4}{8
↔9}
{1↔
2}
{6↔
7}
{11↔0} {4↔5}
{2↔3}
{7↔8}
{0↔1}
{9↔10}
{024579e}{024679e}
{124679e}{124689e}
{134689e}
{13468te}{13568te}
{13568t0}
{135
78t0
}{2
3578
t0}
{235
79t0
}{24579t0}
Cc
f F
a A
[e] [E]
e E
[g] [G]
d D
fs
gs
Fs
[as]
[cs]
cs
[Cs]
Af
Ef
bf
g G
B
ds
b
Bf
[D]
[Fs]
[Bf]
[Bf]
[Bf]
Df
Example 0.1(b). The Tonnetz, shown here in its dual form. The graph displays some but not all of the efficient voice-leadings among the 24 familiar major and minor triads. Triads connected by horizontal lines share both “root” and “fifth,” and can be connected by voice-leading in which one note moves by one semitone. Triads along the NE/SW diagonal also share two notes and can be connected by single-semitone voice-leading. Triads along a NW/SE diagonal share two notes and can be connected by voice-leading in which one note moves by two semitones.
Example 0.1(c). Douthett and Steinbach’s “Cube Dance.”
Example 0.1(d). Douthett and Steinbach’s “Power Towers.”
C maj
A HM
A hm
D ac
B ac Fs maj
Fs HMFs hm
E HM E maj B maj
A maj
E ac
G maj
E hm
D maj
G ac
A acB HM
B hm
Example 0.1(e). Dmitri Tymoczkoʼs “scale lattice.”
maj = majorac = acoustic HM = harmonic majorhm = harmonic minor
{G↔
Gs}
{E↔
Es}
{C↔Cs}
{A↔As}
{F↔
Fs}
{D↔
Ds}
Example 0.2(a). Joe Straus’s graph of parsimonious connections among trichords
Example 0.2(b). Clifton Callender’s continuous “trichord space.”
v 1 + v 2 + 12= 2v 3
v 3 - v 2= v 2 - v 1
v 1= v2
[037][036]
[027][026]
[016]
[025]
[015]
[024]
[014][012]
[005][004][003][002]
[048]
[006][000]
[013]
[001]
Figure 10: Trichord set-classes in 12-tone equal temperament in the fundamental region.
for all A′ ∈ /A/ and B′ ∈ /B/.
3.6 Comparison with Roeder 1987
[26] The construction of T -class space and its various regions is very similar to the geometricapproach in Roeder 1987, and a brief comparison of the two is in order.21 Roeder constructs an“ordered interval space” (OI-space) for ordered pcsets, where the trichord A is located in a 12 x12 region of the Cartesian plane at (a2 − a1, a3 − a2), and the arithmetic is mod 12. (The model isextendable to higher dimensions for pcsets of greater cardinality.) Since it is limited to pcsets wherethe pitch classes are integers, OI-space for trichords is a toroidal lattice. Roeder provides algebraicand geometric descriptions of pcset inclusion, exclusion, and inversion, and divides ordered intervalspace into regions of permutational and inversional equivalence. (These equations can be translatedinto corresponding equations for T -class space.) These regions contain members of each TnI-typewithout redundancy, similar to Π3.22
[27] There are several differences between OI-space and T -class space: 1) the latter is Euclidean(modular equivalence carves T -class space into regions as opposed to being assumed in toroidal OI-space); 2) the latter is continuous (though, since Roeder’s space is generalizable to any modulus,m, it can be made continuous by allowing m to approach infinity); and 3) the axes in T -class spaceare oblique rather than orthogonal. The first difference allows the use of the Euclidean metric. Thethird difference accounts for the fact that Roeder’s TnI regions are not congruent, in contrast withΠ3, which is a fundamental region. (Skewing OI-space by placing the axes in a 60◦ relation yieldsthe same triangular regions as in T -class space.)
21My thanks to Robert Morris for initially pointing out the similarities and directing me to Roeder’s work.22There are numerous other details that the interested reader is encouraged to study in both Roeder 1987 and
1984.
12
Example 0.2(c). Joe Straus’s graph of parsimonious connections among tetrachords
vi IV ii v
ii
V
iii
Example 0.2(e). Parsimonious voice-leading among diatonic triad-classes
Example 0.2(d) is not available yet.
..
..
.
..
I
Example 0.3(a). John Roeder’s “ordered interval” space.