12
Generator Dynamic Models for Large Scale Grid Simulations John Undrill March 2016 1
| Date post: | 25-Mar-2018 |
| Category: |
Documents |
| Upload: | hoangkhanh |
| View: | 219 times |
| Download: | 3 times |

Generator Dynamic Models for Large Scale Grid Simulations
John Undrill
March 2016
1
Contents
1 General 3
1.1 Generator Behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Modeling based on transient and subtransient behavior of stator current . . . . . . . . . . . . . . . . 3
1.3 Modeling based on electromagnetic inductance relationships . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1 The basic equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Electric circuit equivalent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Various forms of generator dynamic model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 The model parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 References 8
3 Figures 9
List of Tables
List of Figures
1 Transfer function diagram corresponding to generator transfer function description (2), (3) and (4) . . . . . . . 9
2 Thevenin impedance form of generator dynamic model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Generator transfer function diagrams - neglecting saturation . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Frequency response of generator model direct axis transfer functions . . . . . . . . . . . . . . . . . . . . . . . 11
5 Effect of stator current on flux density and saturation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
JMU 2 March 10, 2016

1 General
1.1 Generator Behavior
Dynamic models of a synchronous machine are based on:
a. The observable variation of stator current when a generator is subjected to a short circuit at its terminals.
b. A description of the inductive couplings among electrical circuits on the stator and rotor of the machine.
.
1.2 Modeling based on transient and subtransient behavior of stator current
A good model of the electromagnetic dynamic behavior of a synchronous machine can be constructed entirely onthe basis of the observed behavior of its stator voltage and current.
The amplitude of the sinusoidal component of stator current when the generator is subjected to a short circuit isdeemed by most standards to have the form
i = E[(
1Ls
)+
(1L′− 1
Ls
)exp
(t
T′
)+
(1
L”− 1
L′
)exp
(t
T”
)](1)
The initial amplitude is 1/L”. The amplitude decays rapidly, with a time constant T” to a lesser amplitude, 1/L′,and then decays slowly with a time constant, T′, to the value 1/Ls.
This profile of short circuit current can be observed in a test but translation of a test recording into ’measuredvalues’ of the parameters Ls, L′, L”, T′, andT” is complicated by the fact that the time constant, T”, is little differentfrom the period of the sinusoidal current wave.
The variation of stator current seen in short circuit situations is attributable to variation of the flux linking thestator circuits. This flux linkage is diminished by armature reaction when current flows out of the machine, withthe rate of diminishment being determined by the inductive time constants (i.e. L/R) of the magnetic circuits.
The magnetic dynamic behavior of the machine can be described in terms of flux linkage and stator current, andexcitation voltage by the transfer function relationship
vq(s) = Ψd(s) = G(s)E f d(s)− Ld(s)Id(s) (2)
This relationshaip is frequently referred to as the operational impedance description of the generator; with L− d(s)being deemed to be the operational impedance description of the direct axis of the machine. (Direct axis is yet tobe defined.)
The transfer functions Ld(s) and Lq(s) have the form
Ld(s) = (Ld − Ll)
1 + (L′d−Ll)(Ld−Ll)
T′dos
1 + T′dos
1 + (L”d−Ll)(L′d−Ll)
T”dos
1 + T”dos
+ Ll (3)
G(s) =(
11 + sT′do
)1 + L”d−Ll)(L′d−Ll) T”dos
1 + sT”do
(4)
JMU 3 March 10, 2016

In these transfer function definitions the parameters Ld, L′d, L”d are descriptions of the components of sinusoidalcurrent that can be observed in the result of a short circuit test and described by equation (1). Thus, description ofthe generator by equations (1), (2), (3), (4) is entirely emperical on the basis of test data and makes no reference tothe characterization of the machine in terms of Maxwellian electromagnetic relationships.
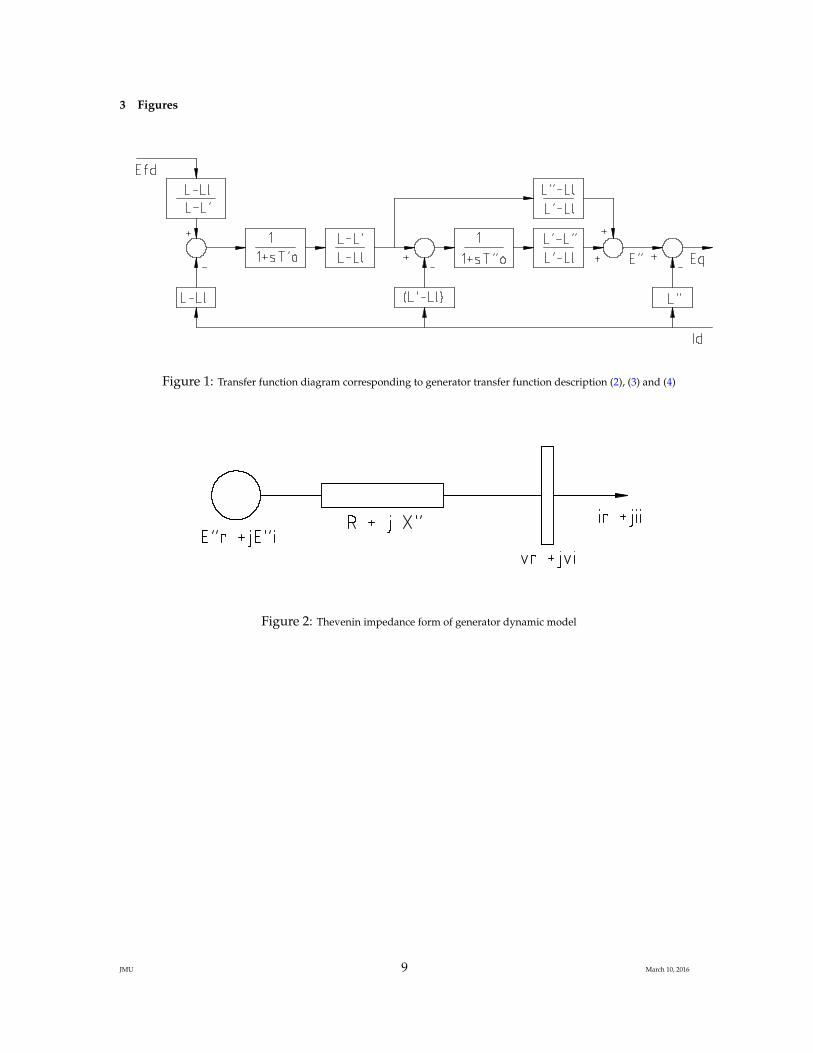
The transfer function description of a dynamic model based entirely on equations (2), (4), and (3) is shown infigure 1.
1.3 Modeling based on electromagnetic inductance relationships
1.3.1 The basic equations
While a model of the magnetic dynamic behavior of the machine can be constructed without reference to adescription in terms of inductive couplings, it is helpful to use a description of the machine terms of inductances.It is not only heopful, but practically essential to describe the machine in terms of inductances when magneticsaturation is to be described.
Basic description of a three phase machine is written in terms of self inductances of individual windings andmutual inductances between pairs of windings. The inductance coefficients relating to the windings vary as themachine rotates and symbolic analysis is impractical. Accordingly, it is common practice to transform thedescription of the machine into a two-axis reference frame by the use of a standard three-to-two axistransformation, which is known in the electric machinery industry as Park’s transformation. The inductancecoefficients in the transformer inductance equations are constant with respect to angular rotation of the machineand these equations are reasonably amenable to symbolic analysis. The description of three phase machines interms of the two axes via Park’s transformation is developed in reference 1.
The inductance coefficients in the transformed equations, while constant with respect to angular rotation, arevariable with respect to flux density and this will soon become important, as discussed in section ??.
The remainder of this discussion of the synchronous machine refers to the set of equations on the following page.These equations are the ’transformed’ form of the equations describing the individual windings of the machine.They relate currents and voltages that cannot be observed in reality but which can be calculated directly frommeasured point-on-wave values of currents and voltages.
JMU 4 March 10, 2016
ψ f d
ψkd
ψkq1
ψkq2
=
L f f d L f kd
L f kd Lkkd
Lkq11 Lkq12
Lkq12 Lkq22
i f d
ikd
ikq1
ikq2
−
La f d
Lakd
Lakq1
Lakq2
[
idiq
](5)
[ψd
ψq
]=
[La f d Lakd
Lakq1 Lakq2
] i f d
ikd
ikq1
ikq2
−[
Ld
Lq
] [idiq
](6)
1ω0
sψ f d
sψkd
sψkq1
sψkq2
= −
r f d
rkd
rkq1
rkq2
i f d
ikd
ikq1
ikq2
+
e f d
000
(7)
[vd
vq
]=
1ω0
[sψd
sψq
]− R
[idiq
]+
1ω0
[0 −ω
ω 0
] [ψd
ψq
](8)
Te = ψd iq − ψq id (9)
Pe = vd id + vq iq (10)
v2t = v2
d + v2q (11)
In these equations the subscripts refer to parts of the machine as follows:
d refers to the direct axis (which is aligned with the magnetic centerline of the machine)q refers to the quadrature axiss refers to the statorf refers to the field winding on the direct axisk refers to the effective path of rotor body or amortisseur winding currents on the direct axisk1 refers to the first effective rotor current path on the quadrature axisk2 refers to the second effective rotor current path on the quadrature axis
JMU 5 March 10, 2016
1.4 Electric circuit equivalent
The objective of the dynamic model of the machine is to represent its behavior when the machine is connected toan electric transmission network. The linkage of the generator model to the network model requires that themachine be represented by an electrical equivalent; the Thevenin equivalent form is convenient here.
The basic equations, (5) to (8) can be organized into very straightforward dyanmic simulation model of theelectromagnetic behavior of the synchronous machine. This organization is described in reference 2.
It is convenient to write the first four of the basic equations in symbolic matrix form as follows
ψr = Lrrir − Lrsis (12)
ψs = Lsr Ir − Lssis (13)
1ω0
dψr
dt= −rrrir + Er (14)
vs =1
ω0
dψs
dt− rssis + Jψs (15)
Equations (5) and (13) to yield
ψ”s = Lsr L−1rr ψr (16)
Then, using this form the above equations the generator can be represented as a Thevenin source whoseamplitude and phase position are variable and a constant impedance, L”.
The form of the Thevenin source is shown in figure 2. The voltage source is given by
(v”d + jv”q) = −ψ”sq + jψ”sd (17)
The Thevenin impedance, L”, is related to the inductance coefficients appearing in equations (5) and (6) by
L” = Lss − Lsr L−1rr Lrs (18)
1.5 Various forms of generator dynamic model
All of the generator dynamic models used in PSS/E and PSLF are Thenenin equivalents based onimplementations of equation (17) and all use a constant inductive impedance, (ra + j(ω/ωo)L”) as the Theveninimpedance. The models are developed and implemented by:
making assumptions as to the values of the inductance coefficients in equations (5) and (6)
working through the matrix operation shown in equation (17) algebraically to yield an expression for thetwo components. v”d and v”q of the Thevenin voltage source.
The algebraic manipulation is tiresome and not very informative. The end results are what is significant.
Differing assumptions and different wanderings through the algebraic implemtation of (16) result in the models,genrou, gentpf, gentpj, and gensal. The algebraic ’wanderings’ reflect the state of engineering computation over thepast 75 years:
JMU 6 March 10, 2016

The gensal model emerged as electronic analog computers came into industrial use. Analog computersrequired the coefficients in equations to be constant and were extremely limited in their capabilities formultiplication and function generation. Even large analog computers were limited in the number andcomplexity of the equations that they could handle; gensal involves many simplifications and compromisesmade in respect of these limitations.
The genrou model emerged as computation made the trasition from analog computers to early digitalcomputers. Variation of coefficients in the generator model could be handled in principle but limitedmemory put a premium on compactness of code and practices used in analog computation persisted. Thegenrou model was used exetnsively by General Electric and was the early ’backbone’ model of the PTIPSS/2 and PSS/E programs.
The gentpf model is traceable to Westinghouse and Arizona Public Service. It emerged somewhat aftergenrou and was able to be more liberal in its use of digital computer memory. Gentpf is descibed inreference 3.
The gentpj model is a variation of gentpf. gentpj was developed as accumulated data from testing of hydroand high speed generators revealed that genrou and gentpf do not represent magnetic saturation accuratelywhen generators are loaded close to their ratings. The coding implementation of gentpf and gentpj isdescibed in reference 4.
1.6 The model parameters
With the exception of direct axis synchronous reactance, Ld, it is not practical, or even possible in many cases, tomeasure the values of the parameters appearing in equations (5) and (6). All of the generator models listed aboveare based on assumed values of these parameters that will result in simulated behavior that is a reasonableapproximation to the factual behavior of the machine. All of the models are based on it being deemed thatequation (1) states the factual behavior of the machine in a short circuit and that the corresponding transferfunction statement of machine behavior, (2), (4), (3) correctly to the factual behavior. The empericaly definedparameters, Ld, L′d, L”d which desribe the evolution of current amplitude in (1) and T′do, T”do, which describe thetiming of this evolution, are input parameters to the models. The values of the inductance coefficients, Lkd forexample, are assumed to take values such that the models give behavior corresponding to the empericalinformation embodies in (1) = (4).
The difference assumptions regarding the coefficients in (5) and (6) lead to linear transfer function diagrams ofdifferent forms. Figures ??, ??, ?? show transfer function diagrams describing the direct axis behavior of themodels, gensal, genrou, and gentpj. These correspond to the transfer function diagram shown in figure 1 whichimplements the emperical dynamic characteristic (2) without using reference to the inductance relationships of(5)-(8).
The relative characteristics of the models can be by comparing the frequency response calculated to by thesemodels, using the same input parameters, Ld, L′d, L”d, T′do, T”do, for all. This comparison is shown by figure 4.
JMU 7 March 10, 2016

2 References
1. "Synchronous Machines", C. Concordia, Wiley, 1951
2. "Structure in the Computation of Power System Dynamical Response", J. Undrill, IEEE Trans, Vol PAS88,pp 1-6, 1969
3. "Digital Simulation of Synchronous Machine Transients", D. W. Olive, IEEE Trans, Vol PAS-87, pp1669-1675,1968
4. "The gentpj Model", J. Undrill, https://www.wecc.biz/Reliability/gentpj-typej-definition.pdf.
JMU 8 March 10, 2016
3 Figures
Figure 1: Transfer function diagram corresponding to generator transfer function description (2), (3) and (4)
Figure 2: Thevenin impedance form of generator dynamic model
JMU 9 March 10, 2016
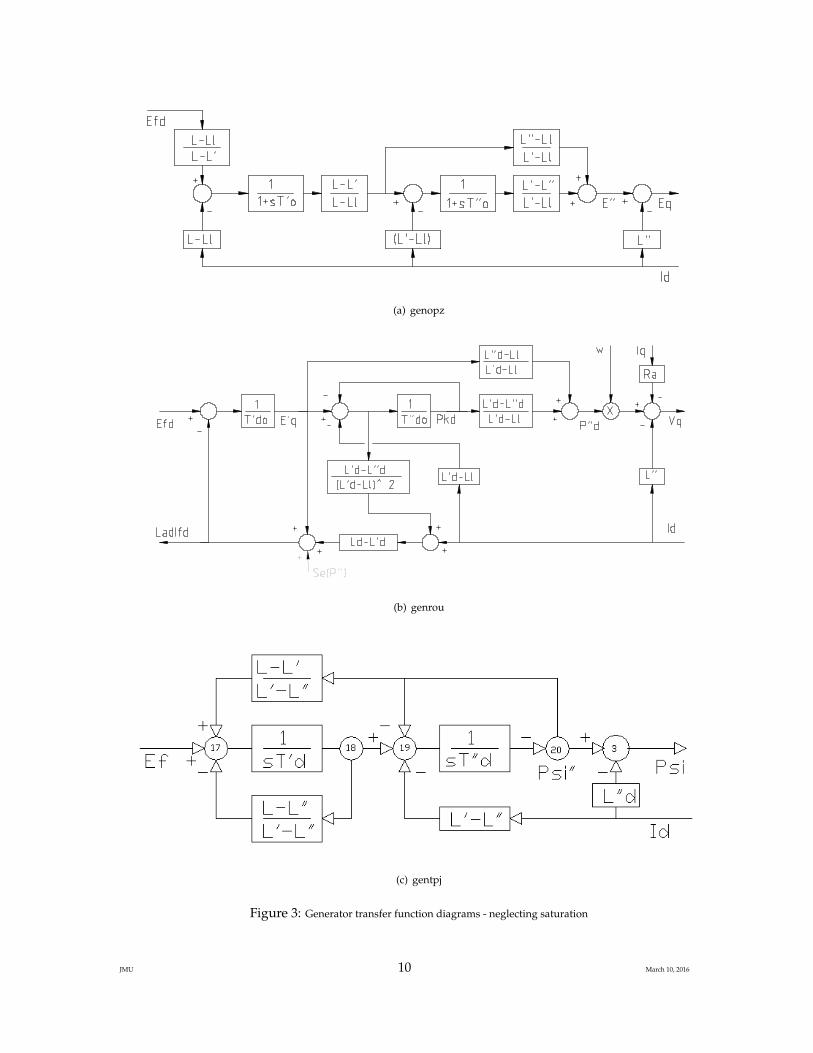
(a) genopz
(b) genrou
(c) gentpj
Figure 3: Generator transfer function diagrams - neglecting saturation
JMU 10 March 10, 2016

10 -4 10 -3 10 -2 10 -1 100 101 1020
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Am
plitu
de
10 -4 10 -3 10 -2 10 -1 100 101 102
Frequency, Hz
-60
-50
-40
-30
-20
-10
0
Pha
se, d
eg
Figure 4: Frequency response of generator model direct axis transfer functions
JMU 11 March 10, 2016

Figure 5: Effect of stator current on flux density and saturation
JMU 12 March 10, 2016

















