GODAE OceanView COSS-TT International Coordination Workshop II February 4-7, Lecce, Italy Array testing and impact of observations in the coastal ocean by ensemble methods Pierre De Mey, LEGOS, CNRS/U. Toulouse Matthieu Le Hénaff, U. Miami Julien Lamouroux, NOVELTIS, Toulouse Guillaume Charria, Ifremer/Previmer, Brest Franck Dumas, Ifremer/Previmer, Brest Nadia Ayoub, LEGOS, CNRS/U. Toulouse
Transcript
GODAE OceanView COSS-TT International Coordination Workshop II February 4-7, Lecce, Italy
Array testing and impact of observations in the coastal ocean by ensemble methods
Pierre De Mey, LEGOS, CNRS/U. Toulouse Matthieu Le Hénaff, U. Miami Julien Lamouroux, NOVELTIS, Toulouse Guillaume Charria, Ifremer/Previmer, Brest Franck Dumas, Ifremer/Previmer, Brest Nadia Ayoub, LEGOS, CNRS/U. Toulouse
Array design
• Motivation
– Observational arrays are too often designed ignoring objective criteria
• Objective
– Set up a simple, quantitative criterion to quantify trade-offs & options in the design of observing systems & arrays
– What does the model have to say about observations?
– What do observations have to say about the model?
– Use data assimilation theoretical framework
• Array design approaches in Toulouse group
– Regular OSSEs (e.g. Lamouroux et al., 2007, Jordà et al., 2007)
– EnKF-based ensemble variance reduction studies (e.g. Mourre et al., 2005; 2006; Ayoub et al., 2010)
– Stochastic Representer Matrix analysis (Le Hénaff et al., 2009; De Mey et al., 2010)
Applications by Charria, Lamouroux et al. (2011, 2013)
A simple problem
x augmented state vector (n,1) over time interval of interest
(let me insist on the fact that this is an augmented state vector – everything that will be
shown in this talk includes time as well as space in the definition of observations and
prior state estimate)
oy observations (p,1) verifying to H xy , with:
H( ) observation operator (not necessarily linear, but use linearized version)
),0( RN
Q: how can we characterize the performance of an array (H, R)?
Assume we have a prior state estimate of x and associated error statistics (if not, any
observational array will bring valuable information proportionately to its cost):
tfxx , with:
),0( fN P
What information does the array bring in?
Incremental information brought in by the observations (on top of prior):
Innovation vector Hxyyyd fogo H
The 2nd-order statistics of d can be used to characterize the amount of discrepancy
brought in by the observational array (on top of prior):
TfTHHPRdd , with:
TfHHP Representer matrix : prior state error covariance in observational space Tf
HP Matrix of representers : provide extrapolation from observational array
Representers contain information on how observations are able to detect prior state
error, and constrain an “optimal” solution through extrapolation:
- Extrapolation in space and time
- Extrapolation across variables (in particular the unobserved ones: multivariate
character)
A qualitative/intuitive criterion of array performance
As we saw, the 2nd-order statistics of innovation d can be used to characterize the
amount of discrepancy brought in by the observational array on top of the prior state
estimate:
TfTHHPRdd
Qualitative/intuitive criterion of array performance:
R “dominates”
most of the discrepancies are attributable to observational error
observations are not very useful
TfHHP “dominates”
most of the discrepancies are attributable to prior state errors
observations can be used to identify and correct prior state errors
Towards a formal criterion of array performance
Two paths (among others) to formalize the intuitive order relationship…
Bennett’s “array modes” (e.g. Bennett et al., 1997): these are orthonormal rotation
vectors obtained by diagonalizing the representer matrix:
TTfβλβHHP
: observable degrees of freedom of the physical system for that configuration
: spectrum of RM, to be compared to the diagonal of R (obs. noise floor)
Le Hénaff & De Mey (Le Hénaff et al., 2009): in the general case of non-
homogeneous, non-diagonal R, and observational samples scattered in time, space, and
across variables, use spectrum and array modes of the scaled representer matrix : TTf
μσμRHHPRχ 2/12/1
: spectrum of SRM, to be compared to the diagonal of I (obs. noise floor)
Modal representers μRHPρ2/1 Tf
= representers for the array modes
Stochastic implementation of RM analysis
)2010.,(1
1
)..(:
2/1 aletSakovm
anomaliesEnsembleforecastgesamplesofMatrix
f
f
HARS
A
criterionoriginalofbasis
matrixofestimatem
ofestimatem
TT
TTff
fTfff
2/12/12/12/1
2/12/1
)()ˆ(
))((1
1ˆ
1
1ˆ
RISSRRIFRdd
χSSHARHARχ
PAAP
We now have the following stochastic estimates:
σ̂ = RM spectrum = squares of the singular values of S
μ̂ = Array Modes = singular vectors of S
Modal Representers = μASρ ˆ
1
1ˆ T
m
Stochastic RM spectrum analysis in practice
• RM analysis levels
– Eigenvalues above 1 are associated with array modes detectable above observational noise floor just count them
– Explore array modes & modal representers to get physical insight into the error subspace physical processes which are detectable (constrainable)
– Controllability cannot be checked (no DA)
• Origin of ensemble samples
– From stochastic modelling array performance results do not depend on DA
configuration and DA history
– From an Ensemble filter online analysis allow to study array performance
through regime changes, error estimates are typical of an assimilating system
• Assumptions on prior state error sources
– Comes back to prioritizing what the array is designed for
– E.g. wind stress, surface pressure, bathymetry, river runoff, turbulence (mesoscale, mixing), large-scale circulation, initial/boundary conditions, etc.
Mode 2: Meso1
Mode 3: Meso2+HF
A previous example: wide-swath vs. nadir altimeter
• Compare the performance of the JASON altimeter with the planned SWOT instrument (wide-swath altimetry)
• Only SWOT appears able to usefully detect & constrain coastal mesoscale patterns (array modes 2 and 3) and high-frequency events on the shelf (array mode 3)
RM spectra
JASON
SWOT
First 3 detectable array modes (SLA)
Le Hénaff & De Mey (LEGOS), 2008
4 1
SWOT vs. JASON-1 Mode 1: Swing
(common)
Bay of Biscay 3-km ensemble spanning stochastic response to
wind errors
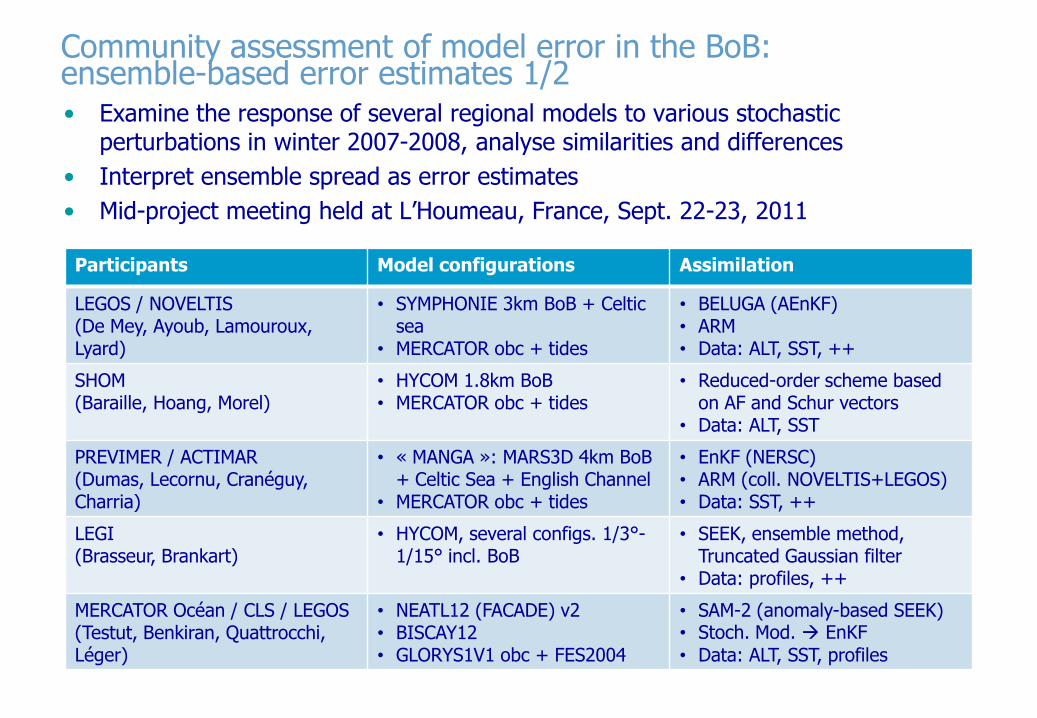
Community assessment of model error in the BoB: ensemble-based error estimates 1/2 • Examine the response of several regional models to various stochastic
perturbations in winter 2007-2008, analyse similarities and differences
• Interpret ensemble spread as error estimates
• Mid-project meeting held at L’Houmeau, France, Sept. 22-23, 2011
Participants Model configurations Assimilation
LEGOS / NOVELTIS (De Mey, Ayoub, Lamouroux, Lyard)
• SYMPHONIE 3km BoB + Celtic sea
• MERCATOR obc + tides
• BELUGA (AEnKF) • ARM • Data: ALT, SST, ++
SHOM (Baraille, Hoang, Morel)
• HYCOM 1.8km BoB • MERCATOR obc + tides
• Reduced-order scheme based on AF and Schur vectors
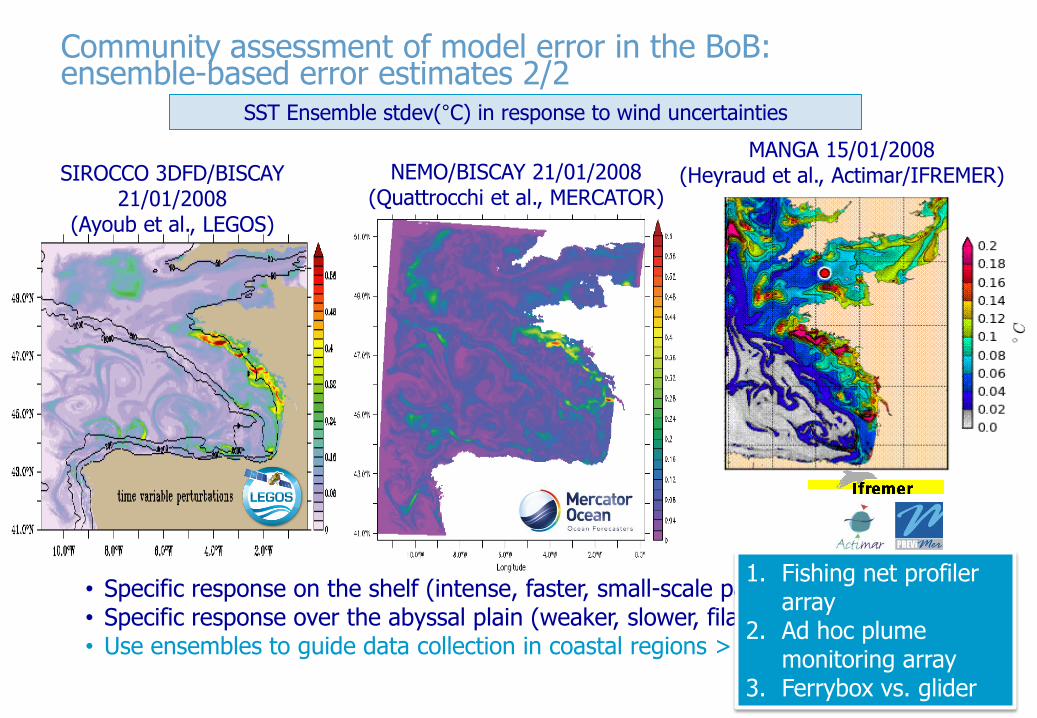
NEMO/BISCAY 21/01/2008 (Quattrocchi et al., MERCATOR)
SIROCCO 3DFD/BISCAY 21/01/2008
(Ayoub et al., LEGOS)
• Specific response on the shelf (intense, faster, small-scale patches) • Specific response over the abyssal plain (weaker, slower, filament-like) • Use ensembles to guide data collection in coastal regions >
Community assessment of model error in the BoB: ensemble-based error estimates 2/2
SST Ensemble stdev(°C) in response to wind uncertainties
MANGA 15/01/2008 (Heyraud et al., Actimar/IFREMER)
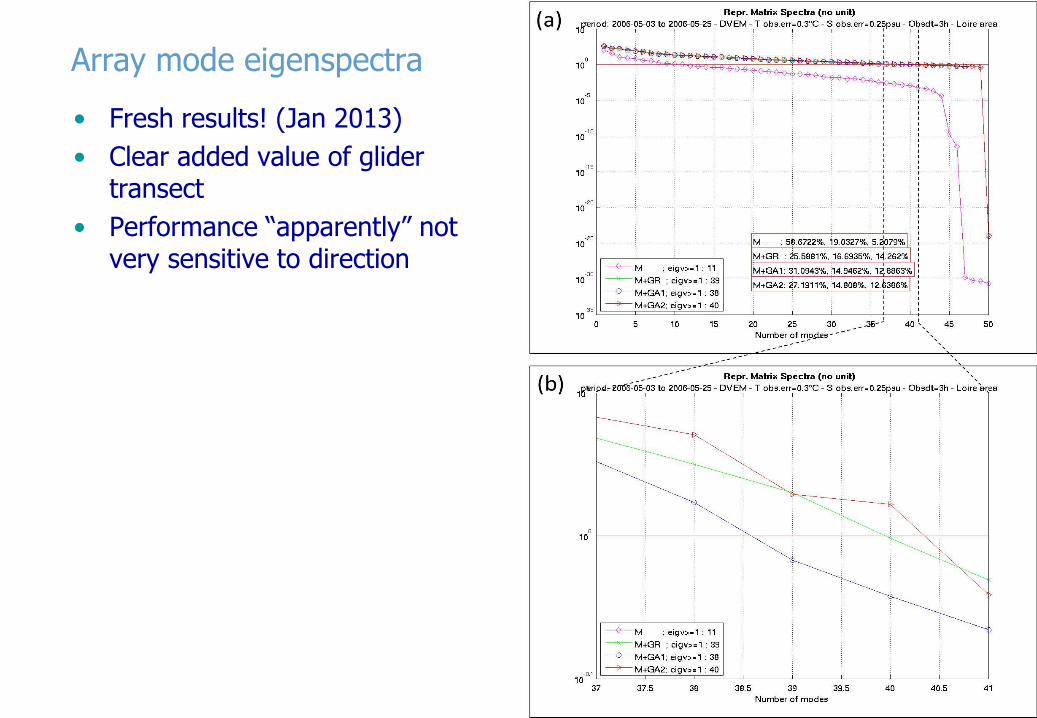
1. Fishing net profiler array
2. Ad hoc plume monitoring array
3. Ferrybox vs. glider
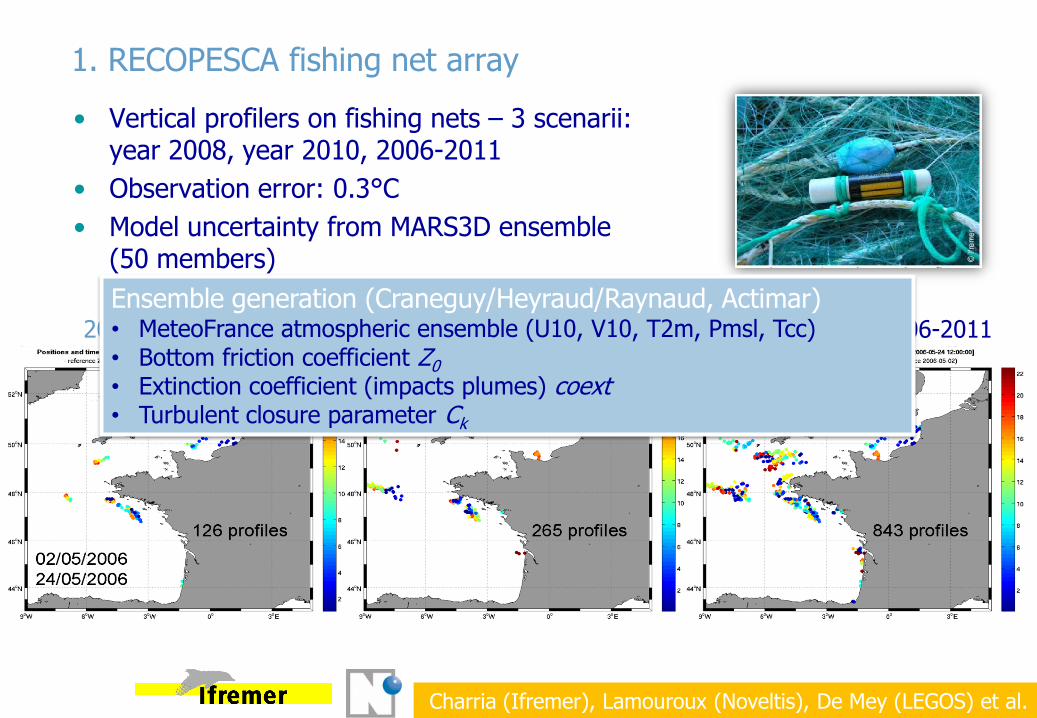
1. RECOPESCA fishing net array
• Vertical profilers on fishing nets – 3 scenarii: year 2008, year 2010, 2006-2011
• Observation error: 0.3°C
• Model uncertainty from MARS3D ensemble (50 members)
12
2008 reference SC1 : based on 2010 SC2 : cumulated 2006-2011
Charria (Ifremer), Lamouroux (Noveltis), De Mey (LEGOS) et al.