20
Hand-Eye Coordination and Vision-based Interaction Martin Jagersand Collaborators: Zach Dodds, Greg Hager, Andreas Pichler
| Date post: | 20-Dec-2015 |
| Category: |
Documents |
| View: | 214 times |
| Download: | 0 times |

Hand-Eye Coordination and Vision-based Interaction
Martin Jagersand
Collaborators: Zach Dodds, Greg Hager, Andreas Pichler

Vision-based Tasks

Everyday Physical Interactions:Installing a Light Bulb

Sensory-Motor Coordination
• Humans interact effortlessly with the world through vision and physical contact
• Fundamental: Sensory-Motor transforms

Different issues
• What tasks can be performed?– Camera models, geometry, visual encodings
• How to do vision guided movement?– H-E transform estimation, feedback,
feedforward motion control
• How to plan, decompose and perform whole tasks?

Tasks and Image Specifications
task space error
image space error
image space satisfied
task space satisfied

Task ambiguity
• Will the scissors cut the paper in the middle?

Task ambiguity
• Will the scissors cut the paper in the middle? NO!

Task Ambiguity
• Is the probe contacting the wire?
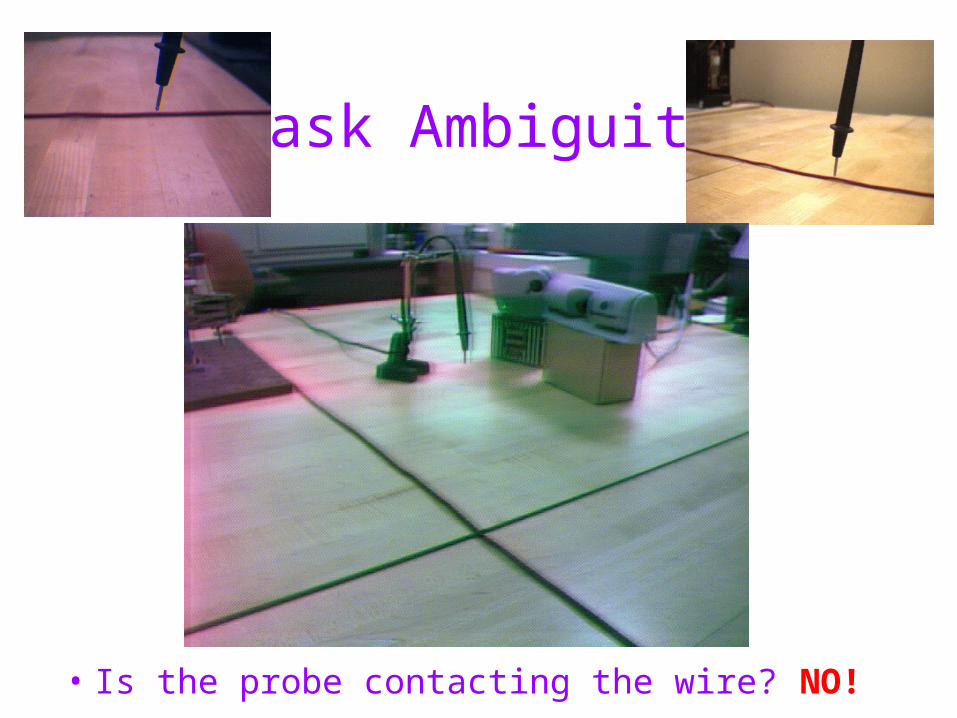
Task Ambiguity
• Is the probe contacting the wire? NO!

Task Ambiguity
• Is the probe contacting the wire?

Task Ambiguity
• Is the probe contacting the wire? NO!

Camera Models• Internal calibration: Longuet-Higgins 1981
• Weak calibration: Faugeras 1992, Hartley 1992
• Affine calibration: Horaud et al. 1998, 1999
• Stratification of stereo vision: Faugeras 1995
- characterizes the reconstructive certainty of weakly, affinely, and internally calibrated stereo rigs
Caff
C inj
Cproj
C sim
reconstruction up to a bijection of task space
up to a projective transformation of task space
up to an affine transformation of task space
up to a similarity (scaled Euclidean transformation)

Visual Invariance
inj injinjinj
proj
sim
aff aff
proj proj

Task Invariance
A task T(f)=0 is invariant under a group G of transformations, iff x
f V , g G with g(f ) V T(f )=0 T(g(f ))=0n
xn
If T(f ) = 0 here,
T(f ) must be 0 here, if T is G invariant
T(f ) must be 0 here, if T is G invariant
T(f ) must be 0 here, if T is G invariant
T(f ) must be 0 here, if T is G invariant
proj
inj
sim
aff

JacobianEstimation

Estimating a Force Frame

Composite Task: Solving a Puzzle

Modulating Basis Vectors

Human Arm Animation
Training sequence Simulated Animation

















