(Clustering of the descriptor) 3.Quantize features using visual vocabulary
(K-means quantizer) 4. Represent images by frequencies of “visual
words”histogram of visual word occurrence is
weighted using the tf-idf . normalized with the L2 norm
Producing a frequency vector fi of length k
tf-idf weighting
tf = 0.030 ( 3/100 )100 vocabularies in a document, ‘a’ 3 times
idf = 13.287 ( log (10,000,000/1,000) )1,000 documents have ‘a’, total number of documents 10,000,000
if-idf = 0.398 ( 0.03 * 13.287 )
Visual word (feature)
image
Datasets INRIA Holidays dataset [4] University of Kentucky recognition
benchmark [9] Flickr1M & Flickr1M*
Binary BOF [12]
Discard the information about the exact number of occurrences of a given visual word in the image
Binary BOF components only indicates the presence or absence of a particular visual word in the image
A sequential coding using 1 bit per component. The memory usage is, then, ┌k/8┐byte per image. The memory usage per image would be typically 10kB per image[12] J.SivicandA.Zisserman. Video Google: A text
retrieval Approach to object matching in videos.In ICCV,pages1470–1477,2003.
Binary BOF [12]
INRIA Holidays dataset
Compressed inverted file [16]
[16]J.ZobelandA.Moffat. Inverted files for text search engines. ACM Computing Surveys,38(2):6,2006.
Compared with a standard inverted file , about 4 times more image scan be indexed using the same amount of memory.
The amount of memory to be read is proportionally reduced at query time.
This may compensate the decoding cost of the decompression algorithm.
Binary BOF [12]
INRIA Holidays dataset
MiniBOFs1) Producing2) Indexing3) Fusing
Performed a query image
Projection of a BOF:vocabulary aggregators Sparse projection matrices
A = {A1,...,Am} of sizes d × k
d = dimension of the output descriptor
k = dimension of the initial BOF
For each projection vector (a matrix row ) , the number of
non-zero components is nz = k/d. Typically set nz = 8 for k=1000
,resulting d = 125
Projection of a BOF: The other aggregators are defined by shuffling the
input BOF vector components using random permutation. For k =12 , d=3 the random permutation
(11,2,12,8,9,4,10,1,7,5,6,3
Image i , m miniBOFs ωi,j , 1 ≤ j ≤ m
fi = BOF frequency vector
Indexing structure [4]
Quantization
k’ = number of codebook entries of the indexing structure
The set of k-means codebooks qj(.), 1<= j <= m, is learned off-line using a large number of miniBOF vectors, here extracted from the Flickr1M* dataset.
The miniBOFs is not related to the one associated with the initial SIFT descriptors, hence we may choose k ≠ k’.
Typically set k’ = 20000
Indexing structure
Binary signature generation bi,j Length of d, refine the localization of the miniBOF within
the cell
Using the method of [4] The miniBOF is projected using a random rotation
matrix R, producing d components
Each bit of the vector bi,j is obtained by comparing the value projected by R to the median value of the elements having the same quantized index. The median values for all quantizing cells and all projection directions are learned off-line on our independent dataset.
Quantizing(Voronoi) cell
Indexing structure
j th miniBOF associated with image i is represented by the tuple
4 bytes to store the image identifier i┌d/8┐byte to store the binary vector bi,j
Total memory usage pre image is Ci =m*( 4 + ┌d/8┐)
Indexing structure
Multi-probe strategy [7] Retrieving not only the inverted list associated
with the quantized index ci,j , but the set of inverted lists associated with the closest t centroids of the quantizer codebook
It increases the number of image hits because t times more inverted lists are visited
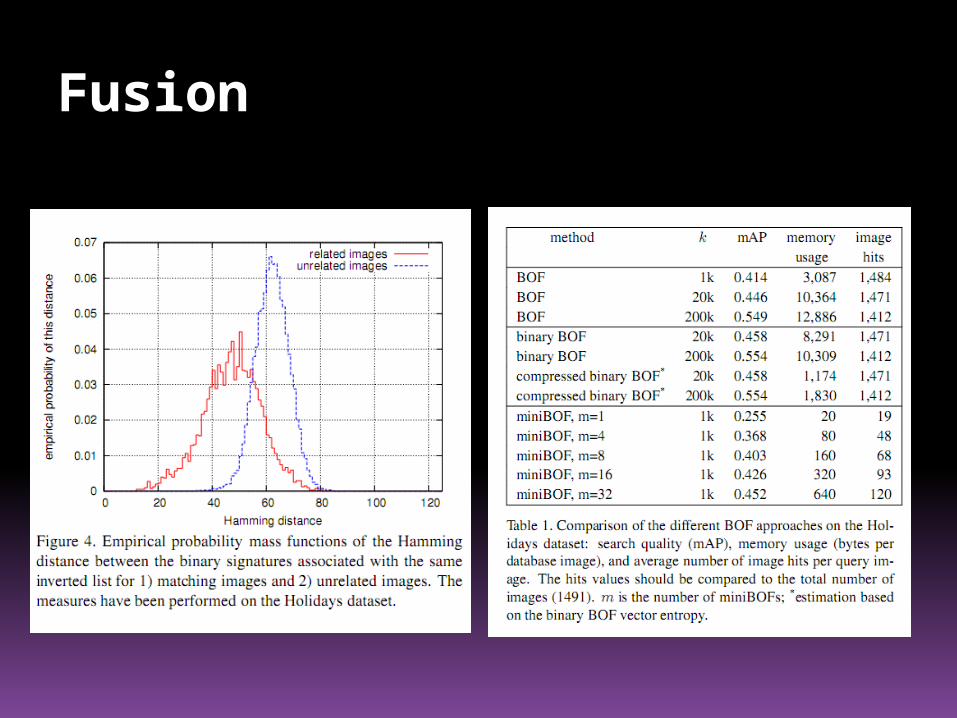
Fusion:expected distance criterion
bi,j The signature associated with the query image q
bq,j The signature of the database image Ibq = [ bq,1,...,bq,m ]bi = [ bi,1,...,bi,m ]
h(x,y) represents the Hamming distance
Fusion
equal to 0
for images having no observed binary signature
equal to d * m/2
if the database image I is the query image itself
The query speed improved by a threshold on the Hamming distance, we use τ = d/2
Fusion
ExperimentsUsed the following parameters in all the miniBOF experiments
On University of Kentucky object recognition
benchmark
On Holidays + Flickr1M
ExperimentsOn Holiday + Flickr1M
ExperimentsSample
Conclusion This paper we have introduced a way
of packing BOFs : miniBOFsAn efficient indexing structure based on
Hamming Embedding allows for rapid access and an expected distance criterion for the fusion of the scores.





































![[inria-00566293, v1] Combining attributes and Fisher …...Combining attributes and Fisher vectors for efcient image retrieval Matthijs Douze INRIA, France matthijs.douze@inria.fr](https://static.documents.pub/doc/80x56/5f0f8d037e708231d444b8c7/inria-00566293-v1-combining-attributes-and-fisher-combining-attributes-and.jpg)



