Theory and Methodology Higher order approximations for the single server queue with splitting, merging and feedback Muckai K. Girish a, * , Jian-Qiang Hu b,1 a SBC Technology Resources, 4698 Willow Road, Pleasanton, CA 94588, USA b Department of Manufacturing Engineering, Boston University, 15 St. Mary’s Street, Boston, MA 02215, USA Received 1 March 1998; accepted 1 March 1999 Abstract The performance evaluation of many modern communication and manufacturing systems has been made possible by modeling them as queueing networks. Due to the limitations of exact algorithms to analyze general queueing networks, researchers have been focusing on developing approximations. Most of the approximations are lower order approxi- mations in the sense that only a few parameters of the interarrival and service time distributions are used. This could lead to large errors in many conditions. In this paper, higher order approximations are developed for the single server queue with splitting, merging and feedback phenomena, which can then be integrated along with parametric decom- position to develop higher order approximations for queueing networks. Not only are the higher order approximations more accurate, but they can also be used to estimate the higher moments of the performance measures. Ó 2000 Elsevier Science B.V. All rights reserved. Keywords: Queueing; Approximation; GI/G/1 queue; Markov renewal processes; Performance evaluation 1. Introduction Sophisticated communication and manufacturing systems are being deployed and used widely and have been constantly evolving due to remarkable technological breakthroughs and increasing demand. Modeling and analysis of these systems are often carried out using results from queueing network theory. The main motivation behind the research reported in this paper is the problem of performance evaluation of general queueing networks. Decades of research has not produced an analytical solution even for the single server queue with general interarrival and service time distributions. Needless to say, exact solution techniques for general queueing networks do not exist today. Exact product form solutions have been derived for special European Journal of Operational Research 124 (2000) 447–467 www.elsevier.com/locate/dsw * Corresponding author. Tel.: +1-925-598-1263; fax: +1-925-598-1322. 1 Tel.: 617 353-9696; fax: 617 353-5548. E-mail addresses: [email protected] (M.K. Girish), [email protected] (J.-Q. Hu). 0377-2217/00/$ - see front matter Ó 2000 Elsevier Science B.V. All rights reserved. PII: S 0 3 7 7 - 2 2 1 7 ( 9 9 ) 0 0 1 7 4 - 5
Transcript
Theory and Methodology
Higher order approximations for the single server queue withsplitting, merging and feedback
Muckai K. Girish a,*, Jian-Qiang Hu b,1
a SBC Technology Resources, 4698 Willow Road, Pleasanton, CA 94588, USAb Department of Manufacturing Engineering, Boston University, 15 St. Mary's Street, Boston, MA 02215, USA
Received 1 March 1998; accepted 1 March 1999
Abstract
The performance evaluation of many modern communication and manufacturing systems has been made possible by
modeling them as queueing networks. Due to the limitations of exact algorithms to analyze general queueing networks,
researchers have been focusing on developing approximations. Most of the approximations are lower order approxi-
mations in the sense that only a few parameters of the interarrival and service time distributions are used. This could
lead to large errors in many conditions. In this paper, higher order approximations are developed for the single server
queue with splitting, merging and feedback phenomena, which can then be integrated along with parametric decom-
position to develop higher order approximations for queueing networks. Not only are the higher order approximations
more accurate, but they can also be used to estimate the higher moments of the performance measures. Ó 2000 Elsevier
Sophisticated communication and manufacturing systems are being deployed and used widely and havebeen constantly evolving due to remarkable technological breakthroughs and increasing demand. Modelingand analysis of these systems are often carried out using results from queueing network theory. The mainmotivation behind the research reported in this paper is the problem of performance evaluation of generalqueueing networks. Decades of research has not produced an analytical solution even for the single serverqueue with general interarrival and service time distributions. Needless to say, exact solution techniques forgeneral queueing networks do not exist today. Exact product form solutions have been derived for special
European Journal of Operational Research 124 (2000) 447±467www.elsevier.com/locate/dsw
0377-2217/00/$ - see front matter Ó 2000 Elsevier Science B.V. All rights reserved.
PII: S 0 3 7 7 - 2 2 1 7 ( 9 9 ) 0 0 1 7 4 - 5
cases though (see the pioneering works of Baskett et al., 1975; Gordon and Newell, 1967; Jackson, 1963).But, the persistent quest for exact or close to exact solution methodologies for general systems still con-tinues.
In Girish and Hu (1996a, b, 1997a, b), various problems in single server queues and tandem queueingnetworks were addressed and a range of interesting results were obtained. Improved higher order ap-proximations for the congestion measures in these systems were developed and the numerical examplesillustrated the gains and the accuracy of these methods. The three most important phenomena to beconsidered in extending the above results to queueing networks are splitting, merging and feedback. Oncethese characteristics can be quanti®ed, we can extend the analysis to queueing networks. For an excellentbackground and popular analysis schemes of queueing networks, the reader is referred to Buzacott and Yao(1986), Kleinrock and Queueing Systems (1975a, b), Kuehn (1979), Suri et al. (1993), Whitt (1983a, b), andthe references therein. One of the most popular and e�ective methodologies in queueing network ap-proximations is parametric decomposition which decomposes a network into single nodes and the inter-actions between these nodes are captured by a few parameters.
The queueing theory literature contains a plethora of approximation techniques for performanceevaluation of queueing networks. Most of these approximations are based on a few parameters of theinterarrival and service time distributions, usually their ®rst two moments. As we have found for singleserver queues and tandem queueing networks (see Girish, 1996), these lower order approximations workvery well under certain restrictive conditions, but they are prone to large errors, in general. The develop-ment of higher order approximations for single node queues and tandem queueing networks and the re-sulting improvement in the accuracy of these methods have motivated us to seek similar and improvedapproximations for more general networks as well. In this paper, we develop higher order approximationsfor the single server queue with in®nite waiting room, general interarrival and service time distributions andwe focus on the phenomena of splitting, merging and feedback. Manufacturing and communication sys-tems have only ®nite bu�ers as opposed to the in®nite bu�er queueing model that is considered in thispaper. Nevertheless, improved solution methods for the in®nite bu�er systems will hopefully lead to bettersolutions for the ®nite bu�er systems in the future.
The ®rst case deals with the splitting of an arrival or departure process into several di�erent processes.Each of these can be either fed into another node or exits the network. We consider two types of processes:one is independent and identically distributed process and the other is the departure process from a GI/G/1queue. We derive the moments of the split processes as well as their lag-1 autocorrelations. These momentsand/or correlations can be matched to a probability distribution which becomes the interarrival distributionat the downstream node. The problem of matching moments to phase-type distributions was studied inJohnson and Taa�e (1989, 1991a, b), Johnson (1993) and Schmickler (1992). Approximate methods tomatch a few moments and the lag-1 autocorrelation to a Markov-modulated arrival process were developedin Girish and Hu (1997a).
The second case considers the superposition or merging of two or more arrival processes. We start withthe merging of two renewal processes. It was shown by Cherry (1972) that this superposed process is aMarkov renewal process. This result is used here to derive all the moments and the derivatives of the densityfunction of the superposed process. Closed form expressions are obtained in this paper when the mergingprocesses have Erlang and mixed Erlang distributions. Moreover, Cherry showed that the superposition oftwo Markov renewal processes is also a Markov renewal process which generalizes this result to themerging of more than two arrival processes as well. Another interesting way to deal with the mergingproblem was studied in Bitran and Dasu (1993, 1994). They use the so called Super-Erlang chains tocharacterize the merging of phase type distributions. But, their approximation is two moment based,whereas ours is a higher order approximation.
The third case addresses the feedback phenomenon. We consider a single server queueing system inwhich a proportion of the departing customers are fed back into the queue. It can be observed that a
448 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
feedback process involves a combination of splitting and merging processes. The main idea behind themethodology proposed here is to iteratively solve for the performance measures by drawing from the higherorder approximations devised for splitting and merging.
The application of the higher order approximations developed in this paper to open queueing networkswithout feedback is rather easy and straightforward. Application of parametric decomposition provides the¯exibility of selecting the parameters to capture the interaction between nodes: for example, several mo-ments and the lag-1 autocorrelation. For queueing networks with feedback, including closed queueingnetworks, some recursive procedure is needed. This will become clearer later in Section 5 in which thefeedback case is studied.
The remainder of this paper is organized as follows. We ®rst summarize the higher order approxi-mation methods for the single server queue based on light tra�c derivatives and interpolation withheavy tra�c limits in Section 2. The moments and the lag-1 autocorrelation of the split processes arederived in Section 3. The case of merging is studied in Section 4, where we show how to derive all themoments and the derivatives of the density function. An iterative algorithm for the feedback case isdeveloped in Section 5. Some numerical examples are presented in Section 6 and this paper is concludedin Section 7.
2. Higher order approximations
In this section, we summarize our higher order approximation methods developed previously for the GI/G/1 queue with in®nite waiting room. With the results we shall establish later for the splitting, merging andfeedback phenomena in queueing networks, these methods can then be applied to develop higher orderapproximations for queueing networks based on parametric decomposition. In fact, they will also be usedin the analysis of the feedback case. We should point out that our higher order approximation methods canalso be used to analyze queues with Markov-modulated arrival processes and service times (see Chen et al.,1997; Girish and Hu, 1996b; Zhu and Li, 1993).
There are basically three types of approximation methods available to estimate the moments of thewaiting and interdeparture time of the GI/G/1 queue. The ®rst method is based on the light tra�c deriv-atives and requires the moments and the derivatives of the interarrival density function and the moments ofthe service time distribution. The second method is based on the heavy tra�c limits and approximates the®rst two moments of the congestion measures based on the ®rst two moments of the interarrival and servicetime distributions. For details on the heavy tra�c approximation procedures, the reader is referred toHarrison and Nguyen (1990), Suri et al. (1993) and Whitt (1983a).
The third method estimates the moments of the waiting and the interdeparture time by using the lighttra�c derivatives and the heavy tra�c limits. These two components are combined using multipoint Pad�eapproximation (see Baker, 1975; Petrushev and Popov, 1987). Again, the inputs needed for this analysis arethe moments and the derivatives of the interarrival density function and the moments of the service timedistribution. It was found in Girish and Hu (1997b) that the interpolation approximation gives very ac-curate and robust estimates under any tra�c intensity even with very low orders of the approximant.
Let A and S denote the generic interarrival and service time random variables, respectively and let h� � �be the interarrival time probability density function. Then, we de®ne the following:
ak � h�k��0��=k!; the kth derivative of h at zero divided by k!;
bk � E�Sk�=k!;
ck � E�Ak�=k!:
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 449
2.1. Light tra�c approximation
For estimating the ®rst k moments of the steady-state waiting time (W ) and system time with a �L=M �rational approximant (note that we need to have L�M > k � 1), the following parameters are needed (seeGirish and Hu, 1996a):1. b1; b2; . . . ; bL�M ,2. a1; a2; . . . ; aL�Mÿkÿ1,3. c1; c2; . . . ; cL�M .
The ®rst k � 1 moments of the interdeparture time can be then estimated based on the ®rst k moments ofthe waiting time, or vice versa. We will refer to this algorithm as MSA (MacLaurin Series Approximation)in this paper. We express the kth moments of the waiting time, system time and interdeparture time, re-spectively as follows:
E�W k�k!�X1m�0
wkmhm; �2:1�
E�T k�k!�X1m�0
tkmhm; �2:2�
E�Dk�k!�X1m�0
dkmhm: �2:3�
Then it is shown in Gong and Hu (1992) and Hu (1996) that wkm, tkm, and dkm can be calculated based on thefollowing recursive equations:
tkm �
bk; m � k;Pki�1
bkÿiwi�mÿk�i�; m > k;
0; m < k;
8>>><>>>: �2:4�
wkm �Pmÿkÿ1
i�0
ait�k�1�i�m; m > k;
0; m6 k;
8><>: �2:5�
dkm �Xk
j�max�1;kÿm��ÿ1�jbkÿj
Xj
i�1
�
ÿ 1�jÿicjÿiti�mÿk�j� ÿ wj�mÿk�j�
!�
bmckÿm; m6 k;
0; m > k:
(�2:6�
2.2. Interpolation approximation
The light tra�c derivatives and heavy tra�c limits can be combined in the development of a higher orderinterpolation approximation for the single server queue. For estimating the ®rst k moments of the steady-state waiting time (W ) and system time with a �L=M � multipoint Pad�e approximant, the following pa-rameters are needed (see Girish and Hu, 1997b):1. b1; b2; . . . ; bL�M�k,2. a1; a2; . . . ; aL�Mÿ1,3. c1; c2; . . . ; cL�M�k.
450 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
The nth moment of the waiting time can be approximated through the following:
�1ÿ qh�nE�W n�h��hn�n� �
det
m�n�2M m�n�2Mÿ1 . . . m�n�M
..
. ... ..
. ...
m�n�M�1 m�n�M . . . m�n�1
s�n�M s�n�Mÿ1 . . . s�n�0
�����������
�����������
det
m�n�2M m�n�2Mÿ1 . . . m�n�M
..
. ... ..
.
m�n�M�1 m�n�M . . . m�n�1
hM hMÿ1 . . . 1
�����������
�����������
; �2:7�
where
m�n�i � u�n�20 hiÿm1ÿ12 ÿ
Xm1ÿ1
k�0
u�n�1�m1ÿiÿk�hk�1
2
;
s�n�q �h� � u�n�20 hqÿm1
2 hm1 �Xm1ÿqÿ1
k�0
Xm1ÿ1ÿkÿq
i�0
u�n�1�m1ÿ1ÿqÿkÿi��h2 ÿ h�hm1ÿkÿ1
hi�12
;
u�n�20 � n!qn�n� �c2a � c2
s �c1
2
� �n
;
u�n�1m � n!Xn
i�0
�ÿq�in
i
!wn�m�n�n�ÿi�;
and h2 � 1=q; q � b1=c1; n� � 1. Moreover, c2a and c2
s denote the squared coe�cients of variation of theinterarrival and service time random variables, respectively.
Note that the heavy tra�c limits require only the parameters, b1; b2; c1; c2.
2.3. Matching moments and correlations
We ®rst present the formulas for matching the ®rst three non-central moments to a mixture of twoErlang distributions of common order. Let Mi be the ith non-central moment of the approximated dis-tribution. To match the ®rst three moments to a mixture of two Erlang distributions of common order (n),the parameters to be determined are n; p; k1 and k2. Suppose n� is the smallest integer that satis®es thefollowing two inequalities:
n�PM2
1
M2 ÿM21
; �2:8�
n�P2�M2 ÿM2
1 �2 �M21 M2 ÿM1M3
M1M3 ÿ �M2 ÿM21 ��M2 ÿ 2M2
1 �: �2:9�
Choose any n P n�. The other parameters of the mixed-Erlang distribution can then be determined basedon the following equations:
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 451
k1 � 2D1
D2 �������������������������D2
2 ÿ 4D1D3
p ; �2:10�
k2 � 2D1
D2 ÿ������������������������D2
2 ÿ 4D1D3
p ; �2:11�
p � k1
1ÿ k2Ak1 ÿ k2
; �2:12�
where
A � M1
n; B � M2
n�n� 1� ; C � M3
n�n� 1��n� 2� ;
D1 � A2 ÿ B; D2 � ABÿ C; D3 � B2 ÿ AC:
We now provide the formulas for matching the ®rst two non-central moments and the lag-1 autocor-relation to a Markov-modulated Poisson process. We assume that the ®rst two non-central moments de-noted by M1;M2 and the lag-1 autocorrelation denoted by v are known. The approximating MMPP hasPoisson conditional arrival processes. The underlying Markov chain has only two states and the doubly-stochastic transition probability matrix is given by
P � p 1ÿ p1ÿ p p
� �:
The conditional probability distributions of the interarrival time are exponential with means x11, x12, x21,x22. Let us denote the squared coe�cient of variation as c2 � �M2=M2
1 � ÿ 1. The unknown parameters cannow be determined from
x11 � x12 � M1 1
�
�������������c2 ÿ 1
2
r !; �2:13�
x21 � x22 � M1 1
ÿ
�������������c2 ÿ 1
2
r !; �2:14�
p � 2v� �c2 ÿ 3�M21
2�c2 ÿ 1�M21
: �2:15�
The reader should note that these formulas apply only when certain conditions are satis®ed which aredetailed in Girish and Hu (1997a).
3. The case of splitting
Let the departures from a node (or an external arrival process) be split and fed into a number of otherqueues (or exit the system) with certain probabilities. We assume that there is no feedback. Let D be theinterdeparture time random variable and there are n streams that originate from this node with proba-bilities, p1; p2; . . . ; pn. The random variable of the ith stream is denoted by A�i�. Then the moment generatingfunction of A�i� can be shown to be
MA�i��s� � piMD�s�1ÿ �1ÿ pi�MD�s� ; �3:1�
452 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
where MD�s� is the moment generating function of D. It is now fairly straightforward to calculate themoments of A�i�. The moment matching algorithms developed in Johnson, 1993 can match up to the ®rstsix moments and hence we evaluate the ®rst six non-central moments which are given below:
E�A�i�� � E�D�pi
;
E�A2�i�� � E�D2�pi� 2�1ÿ pi�
p2i�E�D��2;
E�A3�i�� � E�D3�pi� 6�1ÿ pi�
p2i
E�D�E�D2� � 6�1ÿ pi�2p3
i�E�D��3;
E�A4�i�� � E�D4�pi� �1ÿ pi�
p2if8E�D�E�D3� � 6�E�D2��2g � 36�1ÿ pi�2
p3i
�E�D��2E�D2�
� 24�1ÿ pi�3p4
i�E�D��4;
E�A5�i�� � E�D5�pi� 10�1ÿ pi�
p2i
fE�D�E�D4� � 2E�D2�E�D3�g
� 30�1ÿ pi�2p3
if2�E�D��2E�D3� � 3E�D��E�D2��2g
� 240�1ÿ pi�3p4
i�E�D��3E�D2� � 120�1ÿ pi�4
p5i
�E�D��5;
E�A6�i�� � E�D6�pi� 2�1ÿ pi�
p2if6E�D�E�D5� � 15E�D2�E�D4� � 10�E�D3��2g
� 90�1ÿ pi�2p3
if�E�D��2E�D4� � 4E�D�E�D2�E�D3� � �E�D2��3g
� 120�1ÿ pi�3p4
if4�E�D��3E�D3� � 9�E�D��2�E�D2��2g
� 1800�1ÿ pi�4p5
i�E�D��4E�D2� � 720�1ÿ pi�5
p6i
�E�D��6:
We will only deal with the lag-1 autocorrelation here since it is the most important one and also sinceour analysis only considers the ®rst lag of the autocorrelation. However, it should be noted that this ap-proach can be extended to the estimation of the higher lags as well. To determine the lag-1 autocorrelationsin the individual streams, the following argument is used. Consider one of the split streams which was splitwith probability p from the original departure stream (D). Also, let Dn denote the interdeparture timebetween customers n and n� 1. Let An�i� denote the interarrival time between customers n and n� 1 thatbelong to the split stream of interest, i. We assume that this process is stationary. Let k be the number ofdepartures before the ®rst arrival of the split stream after the last one and A1�i� be the corresponding in-terarrival time. Similarly, let j denote the number of departures before the next one and A2�i� the corre-sponding interarrival time. It can be easily veri®ed that k and j are geometrically distributed and areindependent of each other. We have
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 453
E�A1�i�A2�i�� �X
k
Xj
�1ÿ p�jÿ1p�1ÿ p�kÿ1pEXk
i�1
Di
! Xk�j
i�k�1
Di
!" #
�X
k
Xj
p2�1ÿ p�k�jÿ2EXk
i�1
Di
! Xk�j
i�k�1
Di
!" #: �3:2�
If the process being split is an external arrival process which is a renewal process, then the above formulaworks out to
E�A1�i�A2�i�� � �E�D�=p�2;which means that the lag-1 correlation coe�cient is zero. This is quite obvious since the new split process isalso a renewal process.
On the other hand, if the process being split is the departure process from a GI/G/1 queue, then we canexpress the autocorrelation as a function of the GI/G/1 queue parameters since
Dn � Tn�1 ÿ Tn � An;
where An is the interarrival time between customers n and n� 1 and Tn is the system (sojourn) time ofcustomer n. This leads to
EXk
i�1
Di
! Xk�j
i�k�1
Di
!" #� kj�E�A��2 ÿ E�T 2� � E�T1Tk�1� � E�T1Tj�1�
ÿ E�T1Tk�j�1� � E Tk�j�1
Xk
i�1
Ai
" #ÿ E Tk�1
Xk
i�1
Ai
" #; �3:3�
since in steady-state
E�Tk�1Tk�j�1� � E�T1Tj�1�;E�T 2
k�1� � E�T 2�;
E T1
Xk�j
i�k�1
Ai
" #� E Tk�1
Xk�j
i�k�1
Ai
" #� jE�T �E�A�;
EXk
i�1
Ai
! Xk�j
i�k�1
Ai
!" #� kj�E�A��2;
where A denotes a generic interarrival time and T a generic system time of the GI/G/1 queue. The ex-pectations in Eq. (3.3) can now be evaluated using the results from Hu (1996).
Finally, the moments and correlations obtained above can then be used to determine the distributions ofthe split processes, which are arrival processes to other queues. If the correlations were to be ignored, thenthe moments can be matched to a mixed Erlang distribution (see Johnson and Taa�e, 1989; Johnson, 1993).If the ®rst lag of correlation turns out to be signi®cant, then the moments and the correlation can be used toapproximate the arrival process using non-renewal processes, such as Markov-modulated processes (seeGirish and Hu, 1997a).
4. The case of merging
We brie¯y discuss some other methods in the literature for characterizing the merging of two or morearrival processes ®rst. A class of Markov chains were identi®ed in Bitran and Dasu (1993) which are
454 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
termed, Super-Erlang (SE) chains. These are used in the determination of the superposition of phase re-newal processes. Their approach is essentially a second order approximation, in that only the ®rst twomoments are matched. Matching the ®rst moment is trivial. For the second moment, Bitran and Dasu(1993) take into account both the stationary and asymptotic properties. Their computational experimentsshow that SE chains are appropriate only when the stationary variance is greater than the asymptoticvariance. Thus, when the coe�cient of variation of each process being merged exceeds one, this approachdoes not work well. On the other hand, when the coe�cients of variation of the merging processes are lessthan one, this approximation works well. But, note that our approach that will be derived in the subsequentsubsections is a higher order approximation, whereas the method developed in Bitran and Dasu (1993) is asecond order approximation.
Approximating by SE chains is a generalization of the superposition problem considered in Albin (1984)and Whitt (1982), which are also second order approximations. They suggested three approaches formatching the second moment. The variance is set equal to the stationary interval variance in the ®rstmethod. In the second method, the variance is set equal to the asymptotic variance of the merging non-renewal processes. The third method is a hybrid approximation which matches the variance to a convexcombination of the stationary and asymptotic variances. The remainder of this section is devoted to thedevelopment of a novel higher order approximation technique.
4.1. The superposition of two renewal processes
The superposition of two renewal processes was studied by Cherry (1972). It was shown that the re-sulting process is a Markov renewal process. We ®rst outline Cherry's results here and use them in thecalculation of the moments and autocorrelations of the superposed process. These moments and auto-correlations can be used to determine the distribution of the merged process.
Let fXn; n P 1g and fYn; n P 1g denote the stochastic processes associated with the two renewal processesthat are superposed. Let f �x�; F �x� and F �x� denote the probability density function, the cumulative densityfunction and the complementary cumulative density function, respectively of the ®rst process. Letg�y�;G�y� and G�y� denote the same functions for the second process. The superposed process is denoted bythe ordered pair, fZn; Vn; n P 1g, where Zn � 1 if the �nÿ 1�th event (arrival) of the merged process wasproduced by the ®rst process and Zn � 2 otherwise, and Vn is the time elapsed since the last event of thecomponent process which did not produce the �nÿ 1�th event in the merged process. By slightly abusing thenotation, let An stand for the interarrival time of the superposed process between the customers n and n� 1with A0 � 0.
Then it was shown in Cherry (1972) that the stochastic process fZn; Vn;An; n P 0g is a Markov renewalprocess de®ned on �f1; 2g � R�; �2f1;2g � R���. Moreover, let the transition probability matrix of thisMarkov renewal process be denoted by P �A; V jVn� (where we have dropped the subscript n� 1 for A and Vfor notational simplicity) which can be expressed as
P �A; V jVn� �G�V �f �VÿVn� dV U�Aÿ�VÿVn��
G�Vn�F �V �g�V�Vn� dV U�AÿV �
G�Vn�
G�V �f �V�Vn� dV U�AÿV �F �Vn�
F �V �g�VÿVn� dV U�Aÿ�VÿVn��F �Vn�
264375; �4:1�
where U�s� is the Heaviside unit step function:
U�s� � 1; s P 0;0; s < 0;
��4:2�
and the entries of the matrix correspond to
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 455
pij�A; V jVn� � Prob�Zn�1 � j; Vn�1 2 �v; v� dv�; An�16AjZn � i; Vn � vn�: �4:3�Also note that the process fZn; Vn; n P 0g is a Markov chain and the transition probabilities are denoted
by
qij�V jVn� � Prob�Zn�1 � j; Vn�1 2 �v; v� dv�jZn � i; Vn � vn�and the transition probability matrix is
Q�V jVn� �G�V �f �VÿVn� dV
G�Vn�F �V �g�V�Vn� dV
G�Vn�G�V �f �V�Vn� dV
F �Vn�F �V �g�VÿVn� dV
F �Vn�
24 35: �4:4�
It was also shown in Cherry (1972) that this underlying Markov chain has a unique stationary distributiongiven by
Prob�Z � 2; V 2 �v; v� dv�� � F �v�dvE�X � � E�Y � : �4:6�
Our main objective here is to derive the moments and the derivatives of the density function of thisMarkov renewal process. It can be done as follows. From Eq. (4.1), we have
Prob�Zn�1 � 1;An�16 xjZn � 1; Vn � vn� � 1
G�vn�Zx�vn
vn
G�v�f �vÿ vn�dv;
Prob�Zn�1 � 2;An�16 xjZn � 1; Vn � vn� � 1
G�vn�Zx
0
F �v�g�v� vn�dv;
Prob�Zn�1 � 1;An�16 xjZn � 2; Vn � vn� � 1
F �vn�Zx
0
G�v�f �v� vn�dv;
Prob�Zn�1 � 2;An�16 xjZn � 2; Vn � vn� � 1
F �vn�Zx�vn
vn
F �v�g�vÿ vn�dv:
The conditional moments are then
M �k�ij �u� �
Z10
xkd Prob�Zn�1 � j;An�16 xjZn � i; Vn � u� �4:7�
and the unconditional moments can be calculated from:
M �k� � 1
E�X � � E�Y �Z1
0
G�u�X
j
M �k�1j �u�
� F �u�
Xj
M �k�2j �u�
!du: �4:8�
This is true since the superposed Markov renewal process has a stationary distribution with the proba-bilities given in Eqs. (4.5) and (4.6). In the subsections below we show how to derive the moments explicitlyfor several merging distributions such as Erlang and mixtures of Erlang.
456 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
In order to determine the autocorrelations associated with the superposed process, one needs to con-dition on the states of the Markov renewal process and determine the joint distribution of the intervalswhich yield the desired autocorrelations.
Yet another necessary characteristic in our higher order approximation method described in Section 2 isthe derivatives of the probability density function of the superposed process. From the conditional dis-tribution functions, we can easily derive the density function, h�x�:
h�x� � 1
E�X � � E�Y � f �x�Z1
0
G�x0@ � u�du� F �x�
Z10
g�x� u�du
1A� 1
E�X � � E�Y � g�x�Z1
0
F �x0@ � u�du� G�x�
Z10
f �x� u�du
1A: �4:9�
For the merging of arrival processes with Erlang and mixed Erlang distributions, the derivatives of h�x�at zero will also be explicitly evaluated in the subsections below.
4.2. Erlang distributions
The case considered here is the superposition of two Erlang distributions. This will be extended tomixtures of Erlang distributions in the next subsection. An Erlang distribution is characterized by twoparameters: the number of stages and the rate of the exponential distribution in each stage. Let the pa-rameters of the two merging Erlang distributions be X � E�n; k� and Y � E�m; l�, respectively. Then usingthe results from Section 1, we have
M �k�12 �u� �
1
G�u�Z1
0
xkF �x�g�x� u�dx
� 1
G�u�Z1
0
xk lm�x� u�mÿ1eÿ�x�u�l
�mÿ 1�!Xnÿ1
j�0
�kx�jj!
eÿkx dx
� 1
G�u�Z1
0
xklmeÿ�x�u�lXmÿ1
h�0
umÿ1ÿhxh
h! �mÿ 1ÿ h�!Xnÿ1
j�0
�kx�jj!
eÿkx dx
� lm
G�u�Xnÿ1
j�0
Xmÿ1
h�0
�h� j� k�! kj
j! h! �mÿ 1ÿ h�! �k� l�h�j�k�1umÿ1ÿheÿlu;
where we have used the identity
Z10
xkeÿtx dx � k!=tk�1:
For ease of usage, we de®ne /kvw; v � 1; 2; w � 1; 2, to be the four components of the kth moment (M �k�)of the superposed process in Eq. (4.8). We now evaluate the following after observing thatE�X � � E�Y � � �mk� nl�=�kl�:
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 457
/k12 �Z1
0
G�u�M �k�12 �u�
E�X � � E�Y � du
� lm
E�X � � E�Y �Xnÿ1
j�0
Xmÿ1
h�0
�h� j� k�! kj
h! j! �mÿ 1ÿ h�! �k� l�h�j�k
Z10
umÿ1ÿheÿlu du
�Xnÿ1
j�0
Xmÿ1
h�0
�h� j� k�!h! j!
kj�1lh�1
�mk� nl��k� l�h�j�k�1: �4:10�
Similarly, we have
M �k�11 �u� �
1
G�u�Z1x�0
xkG�x� u�f �x�dx
� 1
G�u�Z1x�0
xk knxnÿ1eÿkx
�nÿ 1�!Xmÿ1
j�0
lj�x� u�jj!
eÿl�x�u� dx
� 1
G�u�Z1x�0
xk knxnÿ1eÿkx
�nÿ 1�!Xmÿ1
j�0
ljXj
h�0
xhujÿh
h! �jÿ h�! eÿl�x�u� dx
� kn
G�u�Xmÿ1
j�0
Xj
h�0
�h� k � nÿ 1�! lj
h! �jÿ h�! �nÿ 1�! �k� l�h�k�n ujÿheÿlu;
and
/k11 �Z1
0
G�u�M �k�11 �u�
E�X � � E�Y � du
� kn
E�X � � E�Y �Xmÿ1
j�0
Xj
h�0
�h� k � nÿ 1�! lj
h! �jÿ h�! �nÿ 1�! �k� l�h�k�nÿ1
Z10
ujÿheÿlu du
�Xmÿ1
j�0
Xj
h�0
�h� k � nÿ 1�! kn�1lh
h! �nÿ 1�! �mk� nl��k� l�h�k�n : �4:11�
And due to symmetry, it immediately follows that
/k21 �Z1
0
F �u�M �k�21 �u�
E�X � � E�Y � du
�Xmÿ1
j�0
Xnÿ1
h�0
�h� j� k�!h! j!
kh�1lj�1
�mk� nl��k� l�h�j�k�1; �4:12�
458 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
/k22 �Z1
0
F �u�M �k�22 �u�
E�X � � E�Y � du
�Xnÿ1
j�0
Xj
h�0
�h� k � mÿ 1�! khlm�1
h! �mÿ 1�!�mk� nl��k� l�h�k�m : �4:13�
Finally, the unconditional non-central moments of the superposed process are given by adding upEqs. (4.10)±(4.13), i.e.,
M �k� �X2
v�1
X2
w�1
/kvw: �4:14�
For the conditional density functions, it can be shown that
f �x�Z1
0
G�x� u�du �Xmÿ1
j�0
Xj
h�0
knljÿhÿ1
�jÿ h�!�nÿ 1�! xn�jÿhÿ1eÿ�k�l�x; �4:15�
F �x�Z1
0
g�x� u�du �Xnÿ1
j�0
Xmÿ1
h�0
kjlmÿhÿ1
j!�mÿ 1ÿ h�! xm�jÿhÿ1eÿ�k�l�x: �4:16�
The other two conditional densities in Eq. (4.9) can be readily established due to symmetry. We use thefollowing notation for the k-th derivative of the density function at zero divided by k!:
ak � h�k��0��k!
; �4:17�where h�x� is de®ned in Eq. (4.9). We now take the kth derivatives of Eqs. (4.15) and (4.16) and thesymmetric counterparts that are listed in Eq. (4.9) and evaluate the resulting expression with x � 0� byemploying the identity
�d�k��xpeÿtx�=dxk�x�0 � k!�ÿt�kÿp=�k ÿ p�! for k P p:
Finally, we divide the resulting expression by E�X � � E�Y � � �mk� nl�=�kl� and after algebraic simpli®-cations, we can show that
ak �Xmÿ1
j�0k P n�jÿhÿ1
Xj
h�0
k!ljÿhkn�1�ÿ�k� l��kÿnÿj�h�1
�jÿ h�!�nÿ 1�!�k ÿ nÿ j� h� 1�!�mk� nl�
�Xnÿ1
j�0k P m�jÿhÿ1
Xmÿ1
h�0
k!lmÿhkj�1�ÿ�k� l��kÿmÿj�h�1
j!�mÿ hÿ 1�!�k ÿ mÿ j� h� 1�!�mk� nl�
�Xnÿ1
j�0k P m�jÿhÿ1
Xj
h�0
k!kjÿhlm�1�ÿ�k� l��kÿmÿj�h�1
�jÿ h�!�mÿ 1�!�k ÿ mÿ j� h� 1�!�mk� nl�
�Xmÿ1
j�0k P n�jÿhÿ1
Xnÿ1
h�0
k!knÿhlj�1�k� l�kÿnÿj�h�1
j!�nÿ hÿ 1�!�k ÿ nÿ j� h� 1�!�mk� nl� : �4:18�
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 459
As a special case, if both the merging processes are Poisson with rates k and l, respectively, then weknow that the superposed process is also Poisson with rate k� l and we can verify that the above equationswork out to the correct formulas:
M �k� � k!=�k� l�k;ak � �k� l��ÿ�k� l��k:
4.3. Mixed Erlang distributions
A mixed Erlang distribution is characterized by the following parameters:
a � number of branches;
pi � probability of branch i; for i � 1; . . . ; a;
ni � number of stages in branch i; for i � 1; . . . ; a;
ki � rate in branch i; for i � 1; . . . ; a:
Let both the merging processes be mixed Erlang with parametrs �a; pi; ni; ki� and �b; qi;mi; li�, respec-tively. Then, the density and complementary distribution functions are given by
f �x� �Xa
i�1
pikni
i xniÿ1
�ni ÿ 1�! eÿkix;
F �x� �Xa
i�1
Xniÿ1
j�0
pi�kix�j
j!eÿkix;
g�x� �Xb
r�1
qrlmr
r xmrÿ1
�mr ÿ 1�! eÿlrx;
G�x� �Xb
r�1
Xmrÿ1
j�0
qr�lrx�j
j!eÿlrx:
By suitable modi®cations to the previous case with Erlang distributions, it can be shown that
/k11 �Z1
0
G�u�M �k�11 �u�
E�X � � E�Y � du
� wXa
i�1
Xb
r�1
Xmrÿ1
j�0
Xj
h�0
piqr�h� k � ni ÿ 1�! knii lhÿ1
r
h! �ni ÿ 1�! �ki � lr�h�k�ni;
/k12 �Z1
0
G�u�M �k�12 �u�
E�X � � E�Y � du
� wXa
i�1
Xb
r�1
Xniÿ1
j�0
Xmrÿ1
h�0
piqr�h� j� k�!h! j!
kjil
hr
�ki � lr�h�j�k�1;
460 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
/k21 �Z1
0
F �u�M �k�21 �u�
E�X � � E�Y � du
� wXa
i�1
Xb
r�1
Xmrÿ1
j�0
Xniÿ1
h�0
piqr�h� j� k�!h! j!
khi l
jr
�ki � lr�h�j�k�1;
/k22 �Z1
0
F �u�M �k�22 �u�
E�X � � E�Y � du
� wXa
i�1
Xb
r�1
Xniÿ1
j�0
Xj
h�0
piqr�h� k � mr ÿ 1�! khÿ1i lmr
r
h! �mr ÿ 1�! �ki � lr�h�k�mr;
where
w � 1
�Pai�1 pini=ki� � �
Pbr�1 qrmr=lr�
: �4:19�
The unconditional moments are then given by
M �k� �X2
v�1
X2
w�1
/kvw: �4:20�
The derivatives of the density function evaluated at zero can be shown to be
ak � wXa
i�1
Xb
r�1
Xmrÿ1
j�0k P ni�jÿhÿ1
Xj
h�0
piqrk!ljÿhÿ1r kni
i �ÿ�ki � lr��kÿniÿj�h�1
�jÿ h�!�ni ÿ 1�!�k ÿ ni ÿ j� h� 1�!
� wXa
i�1
Xb
r�1
Xniÿ1
j�0k P mr�jÿhÿ1
Xmrÿ1
h�0
piqrk!lmrÿhÿ1r kj
i �ÿ�ki � lr��kÿmrÿj�h�1
j!�mr ÿ hÿ 1�!�k ÿ mr ÿ j� h� 1�!
� wXa
i�1
Xb
r�1
Xniÿ1
j�0k P mr�jÿhÿ1
Xj
h�0
piqrk!kjÿhÿ1i lmr
r �ÿ�ki � lr��kÿmrÿj�h�1
�jÿ h�!�mr ÿ 1�!�k ÿ mr ÿ j� h� 1�!
� wXa
i�1
Xb
r�1
Xmrÿ1
j�0k P ni�jÿhÿ1
Xniÿ1
h�0
piqrk!kniÿhÿ1i lj
r�ki � lr�kÿniÿj�h�1
j!�ni ÿ hÿ 1�!�k ÿ ni ÿ j� h� 1�! : �4:21�
The signi®cance of the above results is that we now have a close form exact expression for all themoments and the derivatives of the probability density function of the superposition of two mixed Erlangdistributions. Since mixed Erlang distributions are a dense set, which means that any known distributioncan be approximated arbitrarily close by a mixture of Erlang distributions, we can now deal with the su-perposition of any two renewal processes.
4.4. The superposition of two Markov renewal processes
It was proved in Cherry (1972) that the superposition of two Markov renewal processes is also a Markovrenewal process. This result essentially generalizes our derivation in the previous subsections to the mergingof more than two arrival processes. Though the expressions would get more complex since the dimension of
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 461
the Markov chain increases and there are several conditioning, we can express the moments in closed formfor this case as well. We will not further derive this, but, it is clearly feasible to modify our approach aboveto come up with the necessary formulae.
5. The case of feedback
The feedback phenomena can be best described by a combination of splitting and merging. The ap-proach that we propose here is an iterative method. Consider a single node queueing system in whichexternal customers arrive as dictated by a generally distributed interarrival time random variable, A. Afterwaiting to get served by a single server (with a generally distributed service time random variable, S), thecustomers either exit the system (with probability p) or reenter the queue (with probability 1ÿ p). Hence,there is a splitting phenomenon at the egress to the queue and a merging phenomenon at the ingress. Theidea suggested here is as follows. First of all, analyze the queue using only the external arrival process andthe service distribution. Determine the moments and the autocorrelations of the interdeparture time basedon the higher order approximation methods described in Section 2. Use the splitting formulae for themoments and autocorrelations (see Section 3) to determine the moments and the autocorrelations of thefeedback process. Then, use the results in Section 4 to evaluate the moments and the derivatives of thedensity function at zero of the merged process which is formed by the superposition of the feedback processand the external arrival process. Next, use the higher order approximation method again to analyze thequeue with this merged process as the arrival process and obtain the departure process parameters andrepeat the process until the steady-state performance measures converge or the number of iterations reach apredetermined limit.
We should point out that in analyzing the merged process of the feedback process and the externalarrival process using the method developed in Section 4, we have implicitly assumed that the two are in-dependent renewal processes. In fact, the feedback process is not a renewal process for the GI/G/1 queueand it is neither independent of the external arrival process. However, our numerical results in Section 6indicate that it seems to be a very good approximation. Of course, our analysis for the merging case can beeasily extended to Markov renewal processes if needed. The following algorithm summarizes the analysis ofthe GI/G/1 queue with feedback.
Algorithm for the analysis of feedback case:1. Set A�0� � A.2. Analyze the GI/G/1 queue with inputs �A�0�; S� and obtain the distribution of D�0� and the moments of
W �0�.3. For each i � 1; . . . ;N or until the performance measures converge (as long as i6N ), do steps 4±6:4. Obtain the distribution of D�i� using the splitting method.5. Obtain the distribution of A�i� using the merging method.6. Analyze the queue with inputs �A�i�; S� and obtain the distribution of D�i� and the moments of W �i�,where A is the external interarrival time random variable, S the service time random variable, A�i� thee�ective interarrival time random variable in iteration i;D�i� the interdeparture time random variable initeration i;D�i� the interdeparture time of the feedback process in iteration i;W �i� the waiting time randomvariable in iteration i;N the maximum number of iterations permitted.
It is interesting to consider the special case when both the external arrival and the service distributionsare exponentially distributed. It is well known that the departure process of the M/M/1 queue is a Poissonprocess. In each iteration of the application of the above algorithm, D�i� is exponentially distributed andthe split process, D�i� is also exponential. The superposition of this process and the external arrival process,A�i� is also exponential and the resulting queue is still M/M/1. Hence, this algorithm will give the exactvalues of the performance measures.
462 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
6. Numerical results
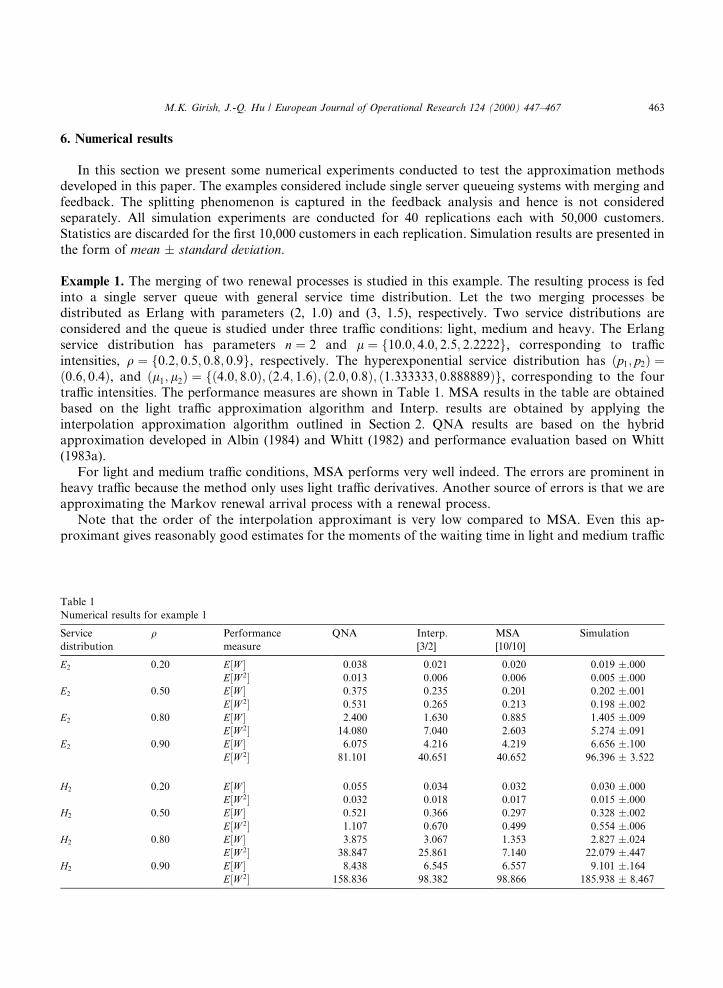
In this section we present some numerical experiments conducted to test the approximation methodsdeveloped in this paper. The examples considered include single server queueing systems with merging andfeedback. The splitting phenomenon is captured in the feedback analysis and hence is not consideredseparately. All simulation experiments are conducted for 40 replications each with 50,000 customers.Statistics are discarded for the ®rst 10,000 customers in each replication. Simulation results are presented inthe form of mean � standard deviation.
Example 1. The merging of two renewal processes is studied in this example. The resulting process is fedinto a single server queue with general service time distribution. Let the two merging processes bedistributed as Erlang with parameters (2, 1.0) and (3, 1.5), respectively. Two service distributions areconsidered and the queue is studied under three tra�c conditions: light, medium and heavy. The Erlangservice distribution has parameters n � 2 and l � f10:0; 4:0; 2:5; 2:2222g, corresponding to tra�cintensities, q � f0:2; 0:5; 0:8; 0:9g, respectively. The hyperexponential service distribution has �p1; p2� ��0:6; 0:4�, and �l1; l2� � f�4:0; 8:0�; �2:4; 1:6�; �2:0; 0:8�; �1:333333; 0:888889�g, corresponding to the fourtra�c intensities. The performance measures are shown in Table 1. MSA results in the table are obtainedbased on the light tra�c approximation algorithm and Interp. results are obtained by applying theinterpolation approximation algorithm outlined in Section 2. QNA results are based on the hybridapproximation developed in Albin (1984) and Whitt (1982) and performance evaluation based on Whitt(1983a).
For light and medium tra�c conditions, MSA performs very well indeed. The errors are prominent inheavy tra�c because the method only uses light tra�c derivatives. Another source of errors is that we areapproximating the Markov renewal arrival process with a renewal process.
Note that the order of the interpolation approximant is very low compared to MSA. Even this ap-proximant gives reasonably good estimates for the moments of the waiting time in light and medium tra�c
Table 1
Numerical results for example 1
Service q Performance QNA Interp. MSA Simulation
distribution measure [3/2] [10/10]
E2 0.20 E�W � 0.038 0.021 0.020 0.019 �.000
E�W 2� 0.013 0.006 0.006 0.005 �.000
E2 0.50 E�W � 0.375 0.235 0.201 0.202 �.001
E�W 2� 0.531 0.265 0.213 0.198 �.002
E2 0.80 E�W � 2.400 1.630 0.885 1.405 �.009
E�W 2� 14.080 7.040 2.603 5.274 �.091
E2 0.90 E�W � 6.075 4.216 4.219 6.656 �.100
E�W 2� 81.101 40.651 40.652 96.396 � 3.522
H2 0.20 E�W � 0.055 0.034 0.032 0.030 �.000
E�W 2� 0.032 0.018 0.017 0.015 �.000
H2 0.50 E�W � 0.521 0.366 0.297 0.328 �.002
E�W 2� 1.107 0.670 0.499 0.554 �.006
H2 0.80 E�W � 3.875 3.067 1.353 2.827 �.024
E�W 2� 38.847 25.861 7.140 22.079 �.447
H2 0.90 E�W � 8.438 6.545 6.557 9.101 �.164
E�W 2� 158.836 98.382 98.866 185.938 � 8.467
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 463
conditions. At q � 0.8, the interpolation algorithm works very well indeed, but at q � 0.9, it is only as goodas MSA estimates.
MSA and interpolation approximation estimates are much better than QNA in light and medium tra�c.In heavy tra�c, QNA works better.
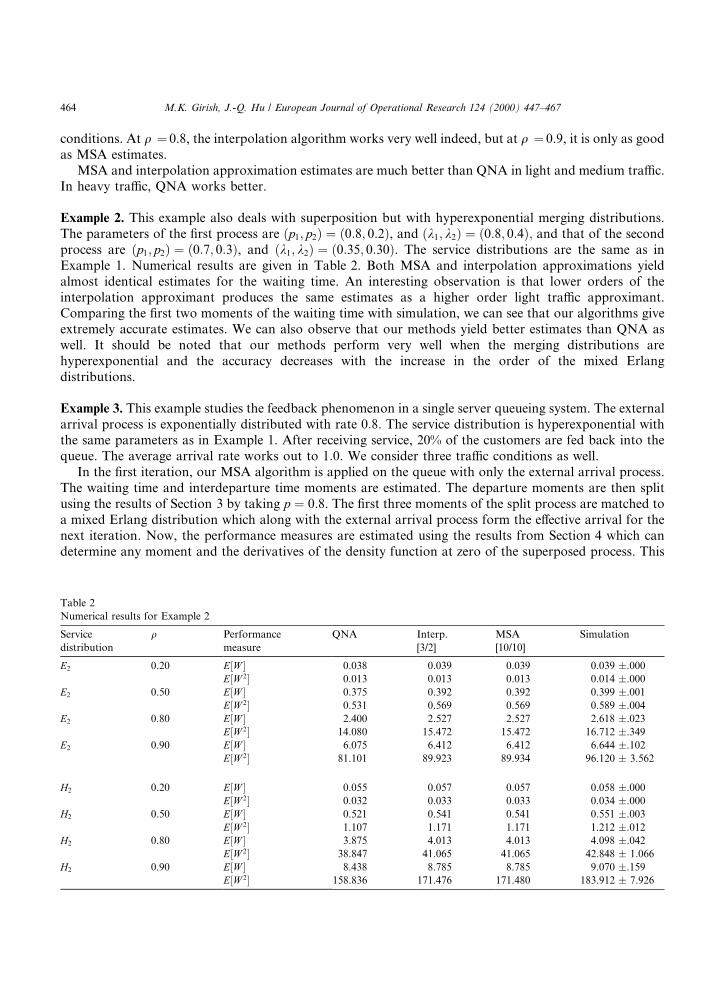
Example 2. This example also deals with superposition but with hyperexponential merging distributions.The parameters of the ®rst process are �p1; p2� � �0:8; 0:2�, and �k1; k2� � �0:8; 0:4�; and that of the secondprocess are �p1; p2� � �0:7; 0:3�, and �k1; k2� � �0:35; 0:30�. The service distributions are the same as inExample 1. Numerical results are given in Table 2. Both MSA and interpolation approximations yieldalmost identical estimates for the waiting time. An interesting observation is that lower orders of theinterpolation approximant produces the same estimates as a higher order light tra�c approximant.Comparing the ®rst two moments of the waiting time with simulation, we can see that our algorithms giveextremely accurate estimates. We can also observe that our methods yield better estimates than QNA aswell. It should be noted that our methods perform very well when the merging distributions arehyperexponential and the accuracy decreases with the increase in the order of the mixed Erlangdistributions.
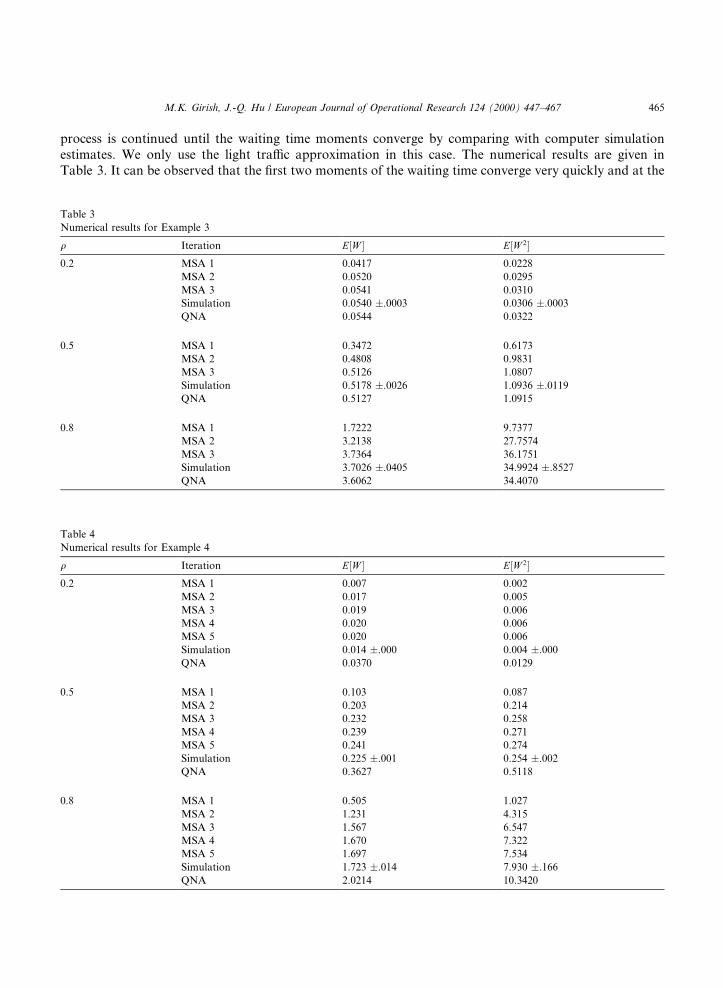
Example 3. This example studies the feedback phenomenon in a single server queueing system. The externalarrival process is exponentially distributed with rate 0:8. The service distribution is hyperexponential withthe same parameters as in Example 1. After receiving service, 20% of the customers are fed back into thequeue. The average arrival rate works out to 1:0. We consider three tra�c conditions as well.
In the ®rst iteration, our MSA algorithm is applied on the queue with only the external arrival process.The waiting time and interdeparture time moments are estimated. The departure moments are then splitusing the results of Section 3 by taking p � 0:8. The ®rst three moments of the split process are matched toa mixed Erlang distribution which along with the external arrival process form the e�ective arrival for thenext iteration. Now, the performance measures are estimated using the results from Section 4 which candetermine any moment and the derivatives of the density function at zero of the superposed process. This
Table 2
Numerical results for Example 2
Service q Performance QNA Interp. MSA Simulation
distribution measure [3/2] [10/10]
E2 0.20 E�W � 0.038 0.039 0.039 0.039 �.000
E�W 2� 0.013 0.013 0.013 0.014 �.000
E2 0.50 E�W � 0.375 0.392 0.392 0.399 �.001
E�W 2� 0.531 0.569 0.569 0.589 �.004
E2 0.80 E�W � 2.400 2.527 2.527 2.618 �.023
E�W 2� 14.080 15.472 15.472 16.712 �.349
E2 0.90 E�W � 6.075 6.412 6.412 6.644 �.102
E�W 2� 81.101 89.923 89.934 96.120 � 3.562
H2 0.20 E�W � 0.055 0.057 0.057 0.058 �.000
E�W 2� 0.032 0.033 0.033 0.034 �.000
H2 0.50 E�W � 0.521 0.541 0.541 0.551 �.003
E�W 2� 1.107 1.171 1.171 1.212 �.012
H2 0.80 E�W � 3.875 4.013 4.013 4.098 �.042
E�W 2� 38.847 41.065 41.065 42.848 � 1.066
H2 0.90 E�W � 8.438 8.785 8.785 9.070 �.159
E�W 2� 158.836 171.476 171.480 183.912 � 7.926
464 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
process is continued until the waiting time moments converge by comparing with computer simulationestimates. We only use the light tra�c approximation in this case. The numerical results are given inTable 3. It can be observed that the ®rst two moments of the waiting time converge very quickly and at the
Table 3
Numerical results for Example 3
q Iteration E�W � E�W 2�0.2 MSA 1 0.0417 0.0228
MSA 2 0.0520 0.0295
MSA 3 0.0541 0.0310
Simulation 0.0540 �.0003 0.0306 �.0003
QNA 0.0544 0.0322
0.5 MSA 1 0.3472 0.6173
MSA 2 0.4808 0.9831
MSA 3 0.5126 1.0807
Simulation 0.5178 �.0026 1.0936 �.0119
QNA 0.5127 1.0915
0.8 MSA 1 1.7222 9.7377
MSA 2 3.2138 27.7574
MSA 3 3.7364 36.1751
Simulation 3.7026 �.0405 34.9924 �.8527
QNA 3.6062 34.4070
Table 4
Numerical results for Example 4
q Iteration E�W � E�W 2�0.2 MSA 1 0.007 0.002
MSA 2 0.017 0.005
MSA 3 0.019 0.006
MSA 4 0.020 0.006
MSA 5 0.020 0.006
Simulation 0.014 �.000 0.004 �.000
QNA 0.0370 0.0129
0.5 MSA 1 0.103 0.087
MSA 2 0.203 0.214
MSA 3 0.232 0.258
MSA 4 0.239 0.271
MSA 5 0.241 0.274
Simulation 0.225 �.001 0.254 �.002
QNA 0.3627 0.5118
0.8 MSA 1 0.505 1.027
MSA 2 1.231 4.315
MSA 3 1.567 6.547
MSA 4 1.670 7.322
MSA 5 1.697 7.534
Simulation 1.723 �.014 7.930 �.166
QNA 2.0214 10.3420
M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467 465
third iteration itself, our estimates are very close to the simulation values. In this example, QNA works wellas well.
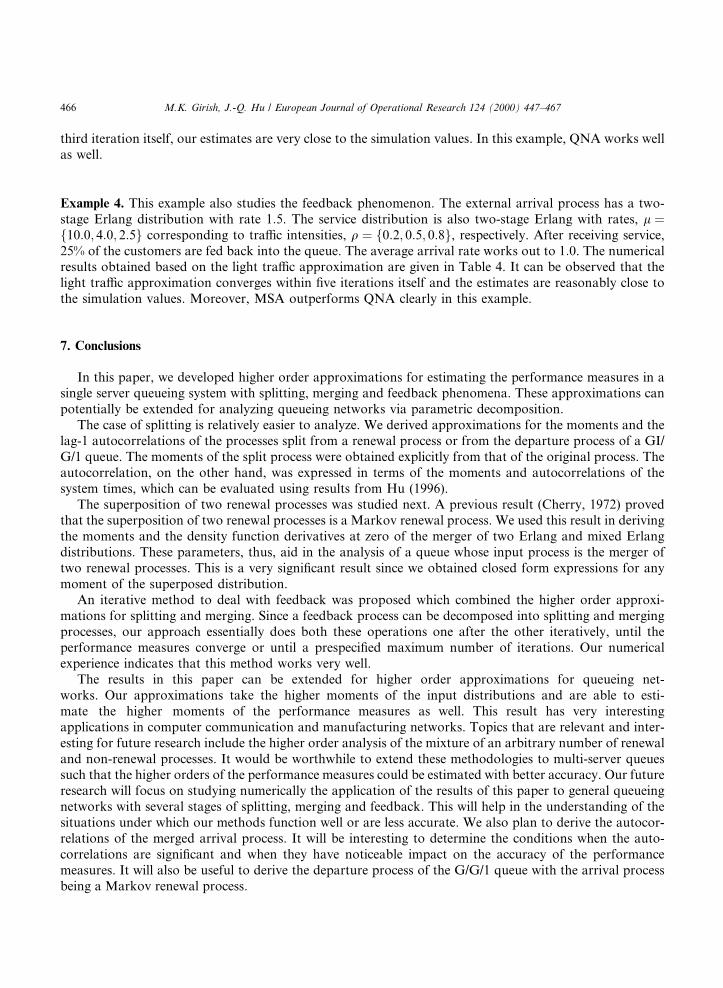
Example 4. This example also studies the feedback phenomenon. The external arrival process has a two-stage Erlang distribution with rate 1:5. The service distribution is also two-stage Erlang with rates, l �f10:0; 4:0; 2:5g corresponding to tra�c intensities, q � f0:2; 0:5; 0:8g, respectively. After receiving service,25% of the customers are fed back into the queue. The average arrival rate works out to 1:0. The numericalresults obtained based on the light tra�c approximation are given in Table 4. It can be observed that thelight tra�c approximation converges within ®ve iterations itself and the estimates are reasonably close tothe simulation values. Moreover, MSA outperforms QNA clearly in this example.
7. Conclusions
In this paper, we developed higher order approximations for estimating the performance measures in asingle server queueing system with splitting, merging and feedback phenomena. These approximations canpotentially be extended for analyzing queueing networks via parametric decomposition.
The case of splitting is relatively easier to analyze. We derived approximations for the moments and thelag-1 autocorrelations of the processes split from a renewal process or from the departure process of a GI/G/1 queue. The moments of the split process were obtained explicitly from that of the original process. Theautocorrelation, on the other hand, was expressed in terms of the moments and autocorrelations of thesystem times, which can be evaluated using results from Hu (1996).
The superposition of two renewal processes was studied next. A previous result (Cherry, 1972) provedthat the superposition of two renewal processes is a Markov renewal process. We used this result in derivingthe moments and the density function derivatives at zero of the merger of two Erlang and mixed Erlangdistributions. These parameters, thus, aid in the analysis of a queue whose input process is the merger oftwo renewal processes. This is a very signi®cant result since we obtained closed form expressions for anymoment of the superposed distribution.
An iterative method to deal with feedback was proposed which combined the higher order approxi-mations for splitting and merging. Since a feedback process can be decomposed into splitting and mergingprocesses, our approach essentially does both these operations one after the other iteratively, until theperformance measures converge or until a prespeci®ed maximum number of iterations. Our numericalexperience indicates that this method works very well.
The results in this paper can be extended for higher order approximations for queueing net-works. Our approximations take the higher moments of the input distributions and are able to esti-mate the higher moments of the performance measures as well. This result has very interestingapplications in computer communication and manufacturing networks. Topics that are relevant and inter-esting for future research include the higher order analysis of the mixture of an arbitrary number of renewaland non-renewal processes. It would be worthwhile to extend these methodologies to multi-server queuessuch that the higher orders of the performance measures could be estimated with better accuracy. Our futureresearch will focus on studying numerically the application of the results of this paper to general queueingnetworks with several stages of splitting, merging and feedback. This will help in the understanding of thesituations under which our methods function well or are less accurate. We also plan to derive the autocor-relations of the merged arrival process. It will be interesting to determine the conditions when the auto-correlations are signi®cant and when they have noticeable impact on the accuracy of the performancemeasures. It will also be useful to derive the departure process of the G/G/1 queue with the arrival processbeing a Markov renewal process.
466 M.K. Girish, J.-Q. Hu / European Journal of Operational Research 124 (2000) 447±467
Acknowledgements
This research is supported in part by the National Science Foundation under grants DDM-9215368, andEEC-9527422. The authors thank the referees for their helpful comments and suggestions that resulted in asigni®cant improvement in the quality of this paper.
References
Albin, S.L., 1984. Approximating a point process by a renewal process, II: Superposition arrival processes to queues. Operations
Research 32, 1133±1162.
Baker, G.A., 1975. Essentials of Pad�e Approximants. Academic Press, New York.
Baskett, F., Chandy, K.M., Muntz, R.R., Palacios, F.G., 1975. Open, closed, and mixed networks of queues with di�erent classes of
customers. Journal of the Association for Computer Machinery 22 (2), 248±260.
Bitran, G.R., Dasu, S., 1993. Approximating nonrenewal processes by Markov chains: Use of Super-Erlang (SE) chains. Operations
Research 41 (5), 903±923.
Bitran, G.R., Dasu, S., 1994. Analysis of the RPhi=Ph=1 queue. Operations Research 42 (1), 158±174.
Buzacott, J.A., Yao, D.D., 1986. On queueing network models of ¯exible manufacturing systems. Questa 1, 5±27.
Chen, H., Hu, J.Q., Girish, M.K., 1997. Markov-modulated queueing networks: Di�usion limits and their applications, submitted for
publication.
Cherry, W.P., 1972. The Superposition of Two Independent Markov Renewal Processes, Ph.D. Dissertation and Technical Report No.
72-10, Department of Industrial Engineering and Operations Research, University of Michigan, Ann Arbor, MI.
Girish, M.K., 1996. Higher Order Approximations for General Open Queueing Networks, Ph.D. Dissertation, Department of
Manufacturing Engineering, Boston University, Boston, MA.
Girish, M.K., Hu, J.Q., 1996a. Higher order approximations for tandem queueing networks. Questa 22, 249±276.
Girish, M.K., Hu, J.Q., 1996b. The departure process of the MAP/G/1 queue, submitted for publication.
Girish, M.K., Hu, J.Q., 1997a Modeling correlated arrival processes in ATM multiplexers, Invited paper. In: Proceedings of the 9th
INFORMS Applied Probability Conference, Boston, MA.
Girish, M.K., Hu, J.Q., 1997b. An interpolation approximation for the GI/G/1 queue based on multipoint Pad�e approximation.
Questa 26, 269±284.
Gong, W.B., Hu, J.Q., 1992. The MacLaurin series for the GI/G/1 queue. Journal of Applied Probability 29, 176±184.
Gordon, W.J., Newell, G.F., 1967. Closed queueing systems with exponential servers. Operations Research 15 (2), 254±265.
Harrison, J.M., Nguyen, V., 1990. The QNET method for two-moment analysis of open queueing networks. Questa 6, 1±32.
Hu, J.Q., 1996. The departure process of the GI/G/1 queue and its MacLaurin series. Operations Research 44, 810±815.