16
Homework 7 Search and Rescue Copter Group Members: Karim Gilani Jaydeep Patel Patrick Fakhir

Homework 7
Search and Rescue
Copter
Group Members:Karim GilaniJaydeep PatelPatrick Fakhir
“We pledge my honor that we have abided by the Stevens Honor System”

Design #1 Hardware Realization Block Diagram:

Design 1 focuses on using the echolocation approach to the obstacle evasion problem to
the autonomous copter. This approach uses the ultrasonic range finder mounted top, bottom,
front left, and front right.
Common Components:
The Gyroscope:
The gyroscope provides data about the current x, y,
and z axis orientation of the copter. This data is
essential to the movement of the copter. If the copter
is tilted forward, thrust from the motors will drive the
copter forward. If the copter is tilted sideways, the
copter will move sideways. The copter relies on its
angular orientation to achieve movement in various
directions.
The particular gyroscope the group chose for the copter is a dual axis gyroscope. The
copter is concerned with only with angular orientation with respect to the x and y axis for
movement. The gyroscope model consumes approximately 7 milliamperes of current at 3 volts.
The weight of the gyroscope is very negligible – and unfortunately not even provided under the
physical description in the datasheet.
The GPS receiver:
While the gyroscope provides angular
orientation, the GPS provides coordinate
location of the copter. The user will determine
where the copter needs to go. GPS is how the
copter will know that it has reached its goal.
This Parallax GPS receiver module can be
queried via serial i/o commands for latitude,
longitude, altitude, speed, and
direction/heading. This satisfies the position
and power alertness functionality previously

discussed. In addition, the PMB-648 based module also supports querying for altitude as
well as tracking of up to 20 satellites. An additional specification important to note is the
acquisition time. On cold and warm starts, the chip requires 42 and 38 seconds
respectively. The module consumes approximately 65 milliamperes of current at 5 volts.
The weight of the gyroscope is also negligible and surprisingly not provided under the
physical description in the datasheet.
The Infrared Camera:
The infrared image data is vital to the
clients of this product. When tracking
people, infrared heat emitted from people is
better contrasted against environmental
surroundings. Operators of the search and
rescue copter can thus spend more time
rescuing than searching for a person in a
regular photo.
The ICI 7320 Pro infrared camera is the most expensive part of design 1. Though
the exact price must be quoted from the supplier, similar products are prices at one
thousand dollars. Though the price is high, this camera comes equipped with 320/240
resolution alongside an auto-tracking feature. Though software is provided alongside
the camera, it would be sufficient to make use of the C++ software development kit
provided with the product for interfacing with the Arduino Mega microcontroller. The
infrared camera consumes 1 watt of power via USB connection. This is equivalent to 200
milliamperes of current at 5 volts operation. The camera weighs 148 grams total
including the lens.
The Camera/Video device:
Though the infrared sensor provides an excellent means for which to search for
someone, a more accurate visual on the status of the victim would be appreciable.
Depending on the economic concerns of the project, a video device may not be worth

the extra capital and power costs incurred to the search and rescue copter. A camera
taking pictures at interval time increments would suffice.
The group chose a small camera with minimal weight: the CM-26N/P CMOS
Camera Module. The camera has a 640 by 480 resolution and operating range of 5 to 15
volts with 50 milliampere current consumption at 12 volts.
The Ultrasonic Range Finder:
The ultrasonic range finder is capable of detecting
objects within a 6.45 meter range. It consumes 2
milliamperes of current with a variable operating
range of 2.5 volts to 5.5 volts, with improved
performance at 5.5 volt operation. Readings can be
taken at a rate of 20 Hz; every 50 milliseconds. With 4
range finders mounted on the copter weighing 4.3
grams a piece, the total weight contribution to the
copter comes out to 17.2 grams.
The Data Storage Device:
The microcontroller has a
limited amount of memory;
much of it will be used in
computing motor power from
gyroscope data and in
buffering image results from
the infrared sensors and
audio/video devices. If the
data from these sensors is stored into volatile memory, a
failure of the search and rescue copter would mean loss of
this important information. Thus a high capacity data
storage device such as an SD card with SD card

reader/writer is essential to success of the copter. This data can be stored into the card
in a format that would be recognized by the corresponding application on the operator’s
laptop.
The Search and Rescue Copter Data Viewer Application:
The data written to the SD card by the copter could easily be viewed as images
but an application would allow for possible future expansion of the project to include
other features. These features may require additional processing of the data before
meaningful results can be properly displayed to the user. The application would act as
an organized base from which behavior of the copter can be programmed and the data
retrieved from the copter viewed.
The Microcontroller:
The
microcontroller is the
main component of the
project and is
responsible for a
number of functions. It
has to interpret data
retrieved from the

dual-axis gyroscope to achieve the desired orientation. In determining the desired
orientation, the controller must take into consideration obstacles sensed by the
ultrasonic sensors. The final changes in power delivered to the motors will produce
thrust in the desired direction. The controller will also save the data obtained from the
infrared sensors and image device.
Given the number of components involved with the project, it is necessary that
the microcontroller have sufficient input/output pins with sufficient power supply to
each. The microcontroller does not have enough memory to buffer the image data but is
able to buffer some data; which can be written to the SD card allowing the next packet
of data to be written.
Calculating Motor Requirements:
In order to calculate the motor requirements, the weight of the copter must be
known. In order for the weight to be known, the motor weight must be known. Using
assumptions about the motor weight, approximated to 64.5 grams each, the assumed
total weight of the copter allows us to calculate the minimum amount of thrust need for
an idle state. This thrust can be calculated by Newton’s first law: F = ma. From this
thrust and known propeller radius, the shaft power required (with motor efficiency
factored in) can be calculated. These calculations are made from aforementioned data
about each component as shown below.
ComponentTotal Mass
(in grams)Operating
Voltage (in V)Current
Draw (in mA)Power Consumption
(in mW)Gyroscope 0 3 7 21
GPS Reciever 0 5 65 325Infrared Camera 148 5 200 1000Regular Camera 50 12 50 600
Ultrasonic Range Finder 17.2 5 2 10Data Storage
Device/Socket 25 0 0 0Microcontroller 175 0 0 0
Motors 258 11 0Propellers 8 0 0 0
Battery 103 11.1 0 0Laser Scanner 141 5 500 2500

Design 1 Totals: 784 grams 2 WattsDesign 2 Totals: 908 grams 4 Watts
, since a = 0 in an idle state.
Where the mass of the copter is in kilograms and g is the acceleration due to gravity = 9.807 m/s2.
The power requirements were calculated using the following equation:
Where
When rearranged to calculate , the motor shaft power with propeller and motor efficiency
considered is:
Propeller Width 0.127 Meters Thrust Design 1 7.691 Newtons Thrust Design 2 8.905 Newtons
D1 Motor Power
Requirements 81 Watts (Motor Efficiency Factored In)D2 Motor Power 101 Watts

Requirements
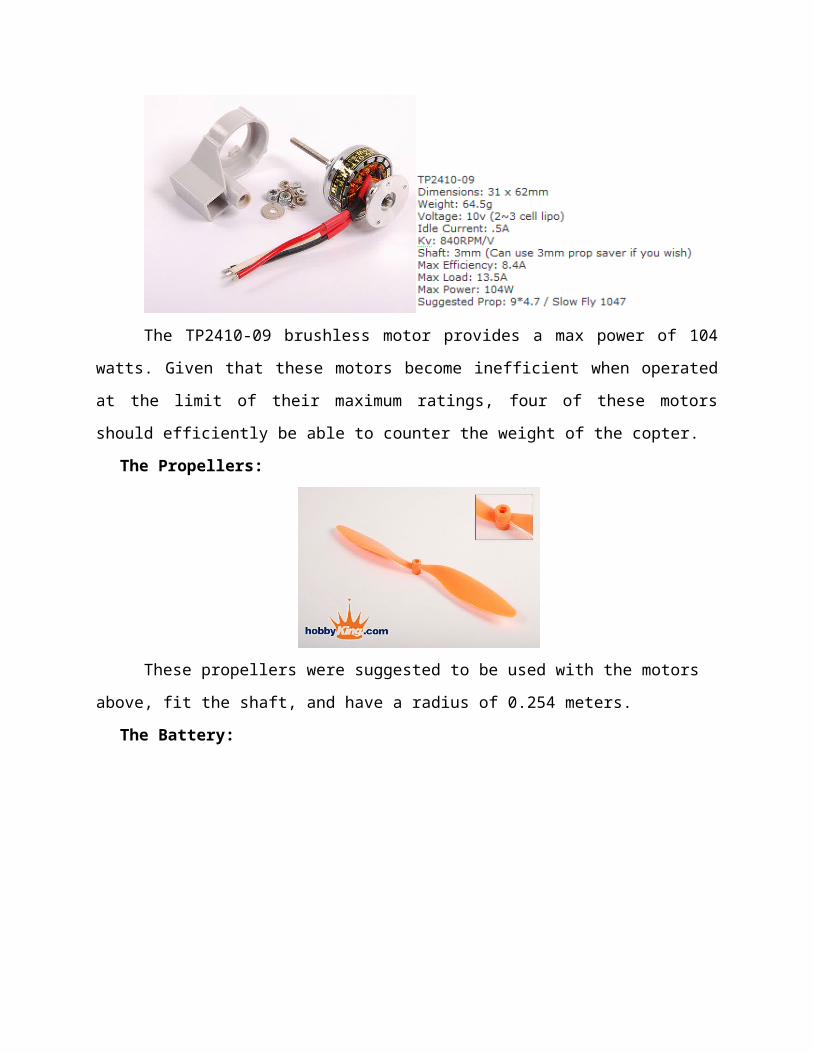
The Motors:
The TP2410-09 brushless motor provides a max power of 104 watts. Given that these
motors become inefficient when operated at the limit of their maximum ratings, four of these
motors should efficiently be able to counter the weight of the copter.
The Propellers:
These propellers were suggested to be used with the motors above, fit the shaft, and
have a radius of 0.254 meters.
The Battery:

The battery is the limiting factor
for the search and rescue copter. Every
component adds weight to the copter,
which must be countered with thrust
from the motor thus constantly
draining power even in a constant
floating position. A high energy density ratio is needed for the battery. Lithium ion is
currently a very feasible option.
Calculation of operating time:
Component Total Mass (in grams)
Power Consumption (in
mW)Gyroscope 0 21
GPS Reciever 0 325Infrared Camera 148 1000Regular Camera 50 600
Ultrasonic Range Finder 17.2 10Data Storage Device/Socket 25 0
Microcontroller 175 0Motors 258 0
Propellers 8 0Battery 103 0
Laser Scanner 141 2500Design 1 Totals: 784 grams 83 WattsDesign 2 Totals: 908 grams 105 Watts

, where
D1 Max Runtime 8.84 MinutesD2 Max Runtime 6.96 Minutes
With Design 1, the copter can run for approximately an additional 1.88 minutes. Of course this is
only the maximum runtime of the copter at steady state. The copter will require additional power due to
acceleration and deceleration towards the destination. If the battery is replaced with a more powerful
battery, the runtime can be increased considerably.
Design #2 Hardware Realization Block Diagram:

The Laser Scanner:
The laser scanner is the alternative to
echolocation that uses the same approach but
with the speed of light alternative. This
alternative is very costly. The Hokuyo R283 laser
scanner costs approximately 2,300 dollars. It can
perform a laser scan in approximately 100
milliseconds. It operates at 5 volts and consumes
500
milliamperes of current – 800 milliamperes rush. It
operates on serial protocol.

















